Изобретение относится к техническим средствам автоматизации технологических процессов обработки или сортировки изделий, в частности к конструкциям промышленных роботов, предназначенных для перегрузки и правильной ориентации предметов и будет использовано при создании промышленного робота, устанавливаемого на сортировочном конвейере.
Известен промышленный робот для перегрузки изделий, например крупногабаритных кинескопов, выполненный в виде перемещающейся тележки, несущей механическую руку со схватом и механизмы вертикального перемещения и поворота руки, которая снабжена опорным диском со срезом, взаимодействующим с роликами, закрепленными на корпусе механизма поворота, соединена с механизмом поворота при помощи двойного шарнира, со схватом посредством шариковой опоры с возможностью плавания захвата в горизонтальной плоскости.
Недостаток указанной известной конструкции заключается в том, что при переориентации предмета возникают большие моменты инерции за счет увеличения переносного момента инерции, обусловленного удалением перемещаемого предмета от осей вращения. Это приводит к увеличению потребной мощности приводов для обеспечения высокого быстродействия механизма.
Известен также промышленный робот для перегрузки и правильной ориентации предметов, содержащий корпус с направляющими, тележку, несущую механическую руку со схватами и приводы вертикального перемещения и вращения руки, которая выполнена в виде двузубой вилки, а схваты выполнены створчатыми, расположены на конце каждого зуба вилки, направлены внутрь ее, снабжены индивидуальными приводами перемещения створок схвата и кинематически связаны с приводом вращения.
Указанный промышленный робот является наиболее близким по своей технической сущности к предлагаемому решению.
Недостаток указанной известной конструкции-прототипа заключается в том, что наличие тележки, совершающей возвратно-поступательные движения, ограничивает достижимое увеличение быстродействия робота и приводит к дополнительным потерям мощности привода. Кроме того, наличие привода вертикального перемещения руки, установленного на тележке, также приводит к дополнительному увеличению мощности двигателя, расходуемой на перемещение тележки с указанным приводом.
Технической задачей, не решение которой направлено предлагаемое техническое решение, является увеличение быстродействия и производительности робота. Технический результат, который может быть получен при реализации изобретения, выражается в устранении возвратно-поступательного движения звена-тележки, несущей механическую руку, наличие которого приводит при больших скоростях работы и частому реверсированию ее двигателей, увеличению моментных нагрузок, а также устранению привода подъема руки.
Поставленная задача решается тем, что промышленный робот, содержащий корпус с установленной на ней рукой, поворотной относительно корпуса вокруг вертикальной оси и выполненной в виде штанги, на конце которой имеется поворотная вилка с вращающимся схватом, а также содержащий привод вращения руки вокруг вертикальной оси, привод вращения вилки вокруг вертикальной оси, привод перемещения створок схвата, привод вращения створок схвата и анализатор расположения предметов на входном конвейере, причем выход анализатора через систему управления роботом связан с названными приводами, содержит несколько равномерно расположенных вокруг общей вертикальной оси рук, совместно связанных с общим для них приводом вращения вокруг вертикальной оси, причем последний выполнен с постоянным направлением вращения, синхронизированным со скоростью движения конвейеров, а направление этого движения у каждого конвейера совмещено с направлением перемещения обращенных к данному конвейеру рук робота, причем каждая рука шарнирно подвешена к выходному валу привода вращения вокруг вертикальной оси с возможностью качания в вертикальной плоскости и связана с корпусом посредством выполненного на нем волнообразного кулачка, имеющего число волновых впадин, кратное числу расположенных вокруг робота конвейеров.
Сопоставительный анализ изобретения с известными аналогами и прототипом показывает, что предложенный робот соответствует критерию "новизна".
На чертеже изображен промышленный робот в плане.
Промышленный робот содержит корпус 1, по поверхности которого выполнен волнообразный кулачок 2, а внутри находится синхронный привод вращения 3, выходной вал 4 которого шарнирно связан со штангой 5. На конце последней шарнирно установлен стакан 6, внутри которого укреплена с возможностью вращения двузубая вилка 7, снабженная индивидуальным приводом вращения 8 и несущая в концевой части каждого зуба схваты 9 со створками 10. При этом схваты 9 направлены своими осями 11 сходимости створок внутрь вилки 7 и снабжены каждый индивидуальным приводом 12 перемещения створок (например, электромагнитом). Корпусы схватов установлены в вилке 7 с возможностью вращения вокруг осей 11 и кинематически связаны посредством передачи 13 с приводом их вращения 14, установленным в верхней части вилки под приводом 8.
Промышленный робот также должен быть укомплектован анализа тором 15 (изображен условно) того или иного типа (телевизионный датчик, акустический, индуктивный и т.д. в зависимости от типа обрабатываемых предметов), предназначенным для опознавания отличий между предметами 16, диктующих характерные индивидуальные задачи их обработки роботом. Выход анализатора, а также входы электроприводов 3,8 и 14 (через соответствующие узлы согласования) подключены к системе управления робота, например микропроцессору (не показан).
При установке на штатное место использования промышленный робот располагается между входным конвейером 17 и выходным конвейером 18. На первом из них находятся произвольно ориентированные предметы 16. В качестве примера таких предметов везде далее рассматривается подлежащая обработке роботом рыба, располагаемая, например, поперек хода конвейера на одинаковом расстоянии друг от друга и находящаяся в одном из четырех возможных положений (на чертеже римские цифры I,II,III,IV). На выходной конвейер 18 в рассматриваемом примере использования робота предметы должны укладываться правильно ориентированными (т.е. в примере с рыбой односторонне направленными головой и брюшком с целью автоматизации дальнейшего процесса их обработки).
Работа промышленного робота заключается в следующем.
В момент подхода очередной рыбы она воспринимается анализатором, который установлен непосредственно перед началом рабочей зоны робота и направлен своей чувствительной зоной на поверхность конвейера 17. В результате работы анализатора реальное положение рыбы идентифицируется с одним из возможных четырех положений I-IV, передается в микропроцессор, который вырабатывает решения о включении тех или иных исполнительных элементов робота, а именно соответствующий сигнал анализатора корректирует работу привода 3, таким образом, что его вращение всегда поддерживается синхронизированным с движением, т.е. моментом прихода рыбы на конвейер 17. В результате данной синхронизации управляющая система робота добивается того, что при зависании очередной вилки 7 над конвейером 17 на последнем как раз под вилкой находится очередной предмет (рыба) 16. Далее штанга 5, попадая в волновую впадину кулачка 2 на корпусе 1, опускает вилку 7 на конвейер 17. В крайнем нижнем положении вилки 7 по сигналам системы управления происходит срабатывание схватов 9 под действием приводов 12, что обеспечивает обжим створками 10 рыбы 16. Далее благодаря продолжающемуся вращению руки робота вокруг вертикальной оси происходит перенос рыбы 16 с конвейера 17 на конвейер 18, а двигателями 8 и 14 за время этого переноса производится (если это необходимо) соответствующая переориентация рыбы до получения правильного ее положения. Так, например, при ориентации рыбы 16 всякий раз в положение 1 на конвейере 18 соответственно из исходных положений на конвейере 17 будут работать следующие двигатели. При переориентации из положения 1 на конвейере 17 двигатель 8 (вращая вилку относительно стакана 6) и двигатель 14 (вращая схваты 9 с помощью передачи 13 относительно осей 11). Из положения II конвейера 17 двигатели 8 и 14 не работают; из положения III работает двигатель 12; из положения IV работает двигатель 7.
При движении привода 3 штанга 5 попадает в волновую впадину кулачка 2, тем самым опуская вилку 7 на конвейере 18. В крайнем нижнем положении вилки 7 по сигналу системы управления происходит открытие створок 10 схватов 9 и укладка рыбы 16 на конвейер 18 в заданное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU870109A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2000 |
|
RU2189306C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2002 |
|
RU2208241C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2212329C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2214327C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2002 |
|
RU2208242C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2193480C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1996 |
|
RU2115539C1 |
Изобретение относится к техническим средствам автоматизации технологических процессов обработки или сортировки изделий, в частности к конструкциям промышленных роботов, и позволяет повысить быстродействие и производительность робота, а также уменьшить его энергопотребление за счет того, что робот содержит несколько равномерно расположенных вокруг общей оси механических рук, совместно связанных с общим для них приводом вращения 3 вокруг вертикальной оси, причем последний выполнен с постоянным направлением вращения. Вращение синхронизировано со скоростью обслуживаемых конвейеров 17 и 18. Каждая механическая рука шарнирнно подведена к выходному валу привода с возможностью качания в вертикальной плоскости и связана с корпусом посредством выполненного на нем волнообразного кулачка 2, имеющего число волновых впадин, кратное числу обслуживаемых роботом конвейеров. 1 ил.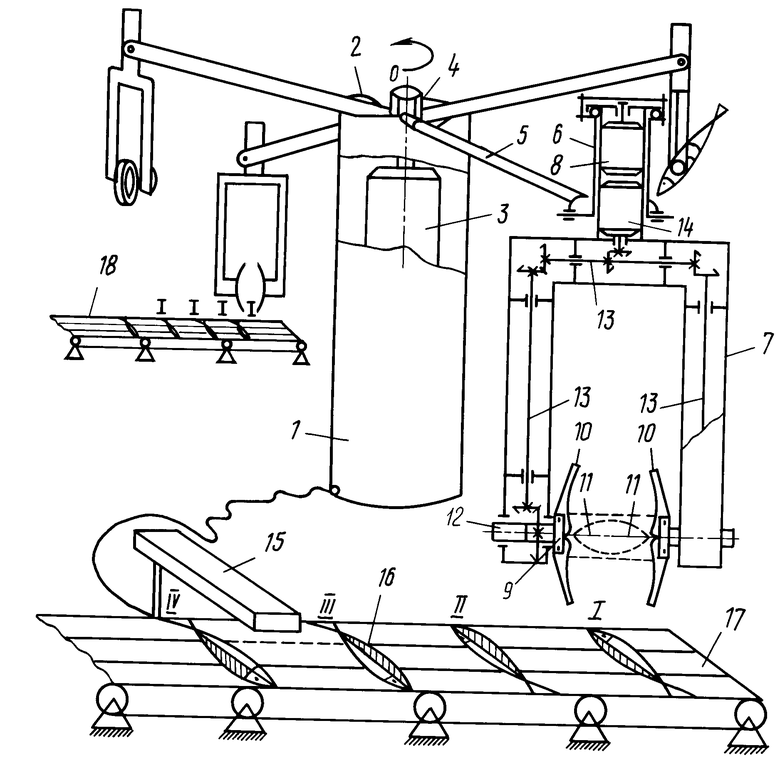
ПРОМЫШЛЕННЫЙ РОБОТ, содержащий корпус, основную механическую руку с шарнирно расположенными на ней схватами, поворотную относительно корпуса вокруг вертикальной оси, приводы вращения основной механической руки вокруг вертикальной оси, вращения схвата и перемещения створок схвата, а также датчик-анализатор, связанный с системой управления и приводами, отличающийся тем, что он содержит дополнительные, равномерно расположенные вокруг вертикальной оси механические руки, аналогичные основной и кинематически связанные с приводом ее вращения с возможностью их качания в вертикальной плоскости, при этом на корпусе дополнительно выполнен волнообразный кулачок, предназначенный для взаимодействия с каждой механической рукой.
| Манипулятор | 1979 |
|
SU870109A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
