Изобретение относится к автоматике и технике связи и может быть использовано в системах дистанционного управления различными объектами, например, моделями или игрушками.
Известны способ и устройство для управления скоростью и направлением средства передвижения. В соответствии с этим способом формируют команды, модулируют ими несущий сигнал с помощью широтно-импульсной модуляции (ШИМ), передают модулированный сигнал по линии связи на управляемый объект, демодулируют принятые сигналы и подают демодулированные команды на два электродвигателя, установленных на этом объекте, осуществляя раздельное управление обоими электродвига- телями [1]
Недостатком данного технического решения является сложность используемой аппаратуры и невозможность увеличения числа передаваемых команд без увеличения числа каналов, либо усложнения передающей стороны.
Наиболее близким к предложенному способу является способ дистанционного управления объектом, включающий формирование команд управления с помощью соответствующих рабочих органов пульта управления, модуляцию сформированными командами несущего сигнала передатчика, передачу модулированных сигналов по линии связи на управляемый объект, демодуляцию принятых сигналов, подачу демодулированных команд на заранее определенные основные исполнительные механизмы управляемого объекта. Данный способ реализован в радиоуправляемой игрушке "Спутник-радио" [2] Из этого же документа известно устройство для дистанционного управления объектом, содержащее на передающей стороне модулятор, передатчик и формирователь команд, выходы которого соединены с соответствующими входами модулятора, выход которого подключен ко входу передатчика, на приемной стороне устройство содержит последовательно соединенные приемник и демодулятор, а также первую группу исполнительных механизмов и первую группу сигнализаторов, выход передатчика через линию связи соединен со входом приемника (там же). Кроме того, данное устройство содержит соответствующие соединения, позволяющие выполнять следующие команды: "стоп", "ход вперед", "движение без поворота", "поворот налево" и "поворот направо". Для организации же выполнения команды "ход назад" в этом устройстве необходимо введение нового канала связи.
Для того, чтобы обеспечить возможность выполнения управляемым объектом дополнительных команд без расширения числа каналов связи, в способе дистанционного управления объектами, включающем формирование команд управления с помощью соответствующих рабочих органов пульта управления, модуляцию сформированными командами несущего сигнала передатчика, передачу модулированных сигналов по линии связи на управляемый объект, демодуляцию принятых сигналов и подачу демодулированных команд на заранее определенные основные исполнительные механизмы, формируют сигналы индикации заранее заданных состояний в работе управляемого объекта с помощью установленных на нем соответствующих датчиков, осуществляют периодическое включение и выключение установленных на управляемом объекте сигнализаторов при возникновении соответствующих сигналов индикации, подают заранее определенные демодулированные команды на соответствующие дополнительно установленные на управляемом объекте исполнительные механизмы либо реверсируют работу соответствующих основных исполнительных механизмов в случае передачи модулированных этими командами сигналов в пределах интервала включения соответствующих сигнализаторов.
Для этой же цели в устройство для дистанционного управления объектами, содержащее на передающей стороне модулятор, передатчик и формирователь команд, выходы которого соединены с соответствующими входами модулятора, выход которого подключен ко входу передатчика, на приемной стороне содержащее последовательно соединенные приемник и демодулятор, а также первую группу исполнительных механизмов и первую группу сигнализаторов, выход передатчика через линию связи соединен со входом приемника, на приемной стороне введены формирователи сигналов индикации, формирователи периодических сигналов, вторая группа сигнализаторов, коммутаторы и вторая группа исполнительных механизмов, выходы первой и второй групп демодулятора подключены соответственно к информационным входам соответствующих коммутаторов и входам соответствующих формирователей сигналов индикации, первый и второй выходы каждого из коммутаторов подключены ко входам одноименных исполнительных механизмов соответственно первой и второй групп, либо ко входам соответственно прямого и реверсивного включения одноименного исполнительного механизма первой группы, выход каждого формирователя сигналов индикации соединен со входами одноименных сигнализаторов первой группы и формирователя периодического сигнала, выход которого подключен ко входу соответствующего сигнализатора второй группы и управляющим входам соответствующих коммутаторов.
Благодаря введению новых признаков в предлагаемом изобретении обеспечивается возможность передачи дополнительных команд на управляемый объект без увеличения числа каналов, так как любая команда, передаваемая во время включения соответствующего сигнализатора, будет приводить к срабатыванию иного исполнительного механизма, нежели при передаче той же команды при выключенном сигнализаторе.
На фиг. 1 представлена функциональная схема устройства; на фиг.2 пример выполнения конкретной приемной стороны этого устройства.
Способ дистанционного управления объектами включает в себя следующие операции:
формирование сигналов управления, осуществляемое с помощью соответствующих рабочих органов (кнопок, ручек и т.п.) пульта управления;
модуляцию сформированными таким образом сигналами управления несущего сигнала передатчика;
передачу модулированных сигналов по линии связи на управляемый объект;
демодуляцию принятых на управляемом объекте сигналов;
индикацию заранее заданных состояний в работе управляемого объекта с помощью установленных на нем соот- ветствующих датчиков;
периодическое включение и выключение установленных на объекте сигнализаторов в случае, когда возникает соответст- вующее состояние в работе этого объекта;
подача демодулированных сигналов управления на заранее определенные основные исполнительные механизмы объекта в случае передачи этих команд (модулированных ими сигналов) в пределах интервала выключения соответствующих сигнализаторов;
подача заранее определенных демодулированных сигналов управления на соответствующие дополнительно установлен- ные на объекте исполнительные механизмы, либо реверсирование работы соответствующих основных исполнительных механизмов в случае, когда эти команды (модулированные ими сигналы) передаются в пределах интервала включения соответствующих сигнализаторов.
Устройство для дистанционного управления объектами состоит из передающей стороны 1, приемной стороны 2 и линии 3 связи. Передающая сторона 1 включает в себя формирователь 4 команд, модулятор 5 и передатчик 6, соединенные последовательно. Приемная сторона 2 содержит приемник 7, демодулятор 8, формирователи 9 сигналов индикации, формирователи 10 периодических сигналов, первую группу сигнализаторов 11, вторую группу сигнализаторов 12, коммутаторы 13, первую группу исполнительных механизмов 14 и вторую группу исполнительных механизмов 15. Выход приемника 7 соединен со входом демодулятора 8, первая и вторая группа выходов которого подключены соответственно к информационным входам соответствующих коммутаторов 13 и входам соответствующих формирователей 9 сигналов индикации. Выход каждого формирователя 9 соединен со входом одноименного сигнализатора 11 первой группы и входом одноименного формирователя 10 периодичес- кого сигнала, выход которого подключен ко входу одноименного сигнализатора 12 второй группы и управляющим входам соответствующих коммутаторов 13. Первый и второй выходы каждого коммутатора 13 соединены либо со входами одноименных исполнительных механизмов 14 и 15 соответственно первой и второй групп, либо со входами соответственно прямого и реверсивного включения одноименного исполнительного механизма 14 первой группы.
Формирователь 4 команд, модулятор 5 и передатчик 6 передающей стороны 1 могут быть выполнены так же, как в выбранном прототипе. Это может быть мультивибратор с регулируемым соотношением длительностей импульса и паузы, выходной сигнал которого запитывает генератор несущей частоты, выход которого подключен к передающей антенне. Регулировка в мультивиб- раторе осуществляется с помощью переменного резистора (ручка "влево/вправо"). Включение мультивибратора осуществляется с помощью кнопки ("ход вперед"). Т.е. при нажатой кнопке на управляемый объект передается команда движения, а поворотом при этом ручки переменного резистора обеспечивается передача по тому же каналу команды поворота в соответствующую сторону.
Приемник 7 и демодулятор 8 также могут быть выполнены аналогично таким же блокам выбранного прототипа. Приемник 7 может быть реализован по схеме сверхрегенеративного приемника (детектора), в котором принимаемый сигнал меняет режим генерации, вызывая появление сигнала на входе демодулятора 8. Последний представляет собой усилительный каскад, нагруженный на два парафазных усилителя, один из которых усиливает сигнал, соответствующий импульсам передаваемой команды, а другой паузам (формируемым мультивибратором передающей стороны 1).
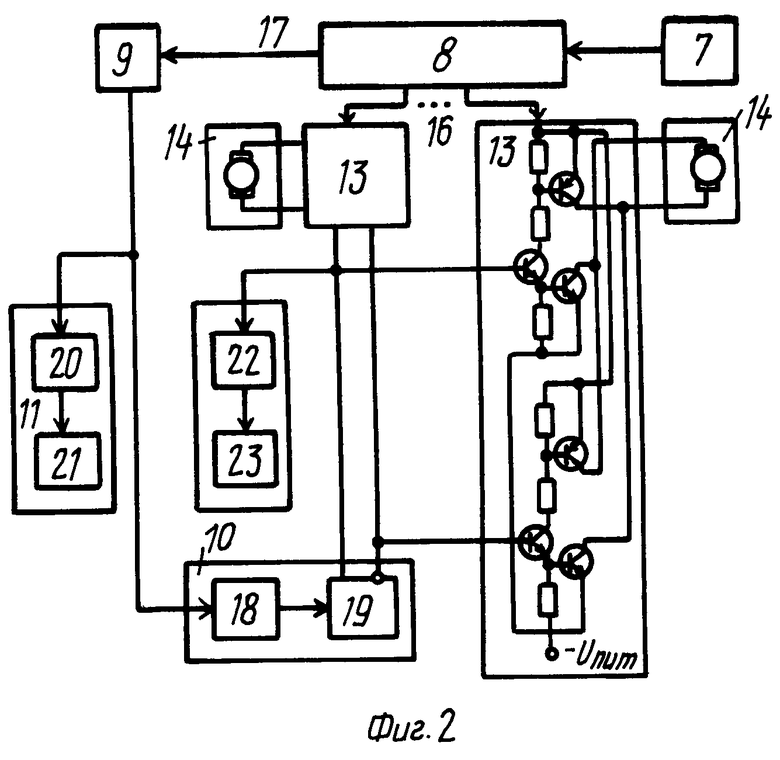
Пример конкретного выполнения приемной стороны 2 приведен на фиг.2 для случая передачи на объект команды "ход назад". В этом случае выходами 16 первой группы являются выходы парафазных усилителей демодулятора, а выходом 17 второй группы выход первого каскада усиления демодулятора. При этом формирователь 9 сигналов индикации представляет собой ключевой элемент, обеспечивающий при своем включении запитку последующих каскадов 10 и 11.
Формирователь 10 периодического сигнала может быть реализован в виде последовательного соединения управляемого генератора 18 импульсов и счетного триггера 19. Сигналы с формирователя 9 (ключевого элемента) запитывают генератор 18 в те интервалы времени, когда нажата кнопка формирователя 4 команд передающей стороны 1. Период повторения импульсов генератора 18 выбирается достаточно большим (например, не менее 1,5 с). При этом на выходах триггера 19 формируются противофазные меандровые сигналы с периодом вдвое большим.
Сигнализатор 11 первой группы в данном примере представляет собой электронный ключ 20 и световой индикатор 21. Причем ключ 20 открывается тогда, когда на выходе 17 демодулятора 8 нет сигнала (индикатор состояния "стоп").
Сигнализатор 12 второй группы в данном примере также выполнен на электронном ключе 22 и световом индикаторе 23, но в этом случае ключ 22 может срабатывать не по отсутствию, а по наличию сигнала, хотя он может быть и аналогичен ключу 20.
В общем случае сигнализаторы 11 и 12 могут быть не только световыми, но и звуковыми. Они могут, в частности, представлять собой отдельные линии связи с объекта на передающую сторону в том случае, когда световые или звуковые сигналы с объекта не могут быть восприняты наблюдателем.
В рассматриваемом примере оба выхода каждого коммутатора 13 соединены со входами прямого и реверсивного включения одноименного исполнительного механизма 14, которым является электродвигатель. Коммутатор 13 представляет собой, например, электронное реле, схема которого дана на рис.2.
Способ дистанционного управления объектами реализуется в устройстве следующим образом.
При включении питания на объекте приемник 7 включается в первый режим, при этом на выходе 17 демодулятора 8 сигнал отсутствует и сигнализатор 11 индицирует состояние "стоп".
При включении кнопки на формирователе 4 команд и положении регулятора в нейтрали мультивибратор передающей стороны 1 генерирует меандровый сигнал, передаваемый по линии связи на объект. На обоих выходах 16 демодулятора 8 присутствуют сигналы, поступающие на информационные входы коммутаторов 13.
Поскольку отсутствие сигнала на выходе 17 демодулятора 8 (до включения команды на передающей стороне 1) вызывает включение генератора 18, на выходах триггера 19 появляются медленные периодические сигналы, подаваемые на управляющие входы коммутаторов 13 и на сигнализатор 12 второй группы. Т.е. в состоянии "стоп" световой индикатор 23 периодически зажигается и гаснет.
Если включение кнопки на формирователе 4 команд происходит в интервале, когда индикатор 23 погашен, коммутатор 13 подключает питание к электродвигателю 14 в прямом включении. Оба двигателя (при нейтральном положении регулятора формирователя 4) запитываются одинаковыми токами и объект движется вперед. При повороте регулятора (задание команды поворота в ту или иную сторону) соотношение величин токов запитки обоих двигателей изменяется и объект осуществляет поворот в заданную сторону.
Если же включение кнопки на формирователе 4 команд происходит в интервале, когда индикатор 23 горит, то коммутатор 13 подключает питание к электродвигателю 14 в реверсивном включении. Тогда объект, в зависимости от поворота регулятора, движется назад прямо или с поворотом. Если необходимо изменить направление движения на обратное, то следует остановить объект (т.е. выключить кнопку формирователя 4 команд). При этом включится индикатор 21 и начнет "мигать" индикатор 23. Нажав кнопку формирователя 4 команд в то время, когда индикатор 23 не горит, можно направить объект вперед.
Данный пример рассмотрен для такого объекта, на котором установлены по одному двигателю с каждой стороны для независимого управления работой каждого из них посредством передачи сигнала ШИМ. В случае, когда используется другой вид модуляции либо иной вид исполнительных механизмов, коммутаторы 13, вместо реверсирования включения этих механизмов, могут переключать их (механизмы 14 и 15 первой и второй групп).
Таким образом, в данном изобретении, без увеличения числа каналов, обеспечивается передача дополнительного числа команд благодаря тому, что наблюдатель, управляющий объектом, распознает состояние, в котором возможно изменить режим движения объекта.
Кроме того, благодаря наличию сигнализаторов 11 и 12 можно обеспечить проверку на исправность систем объекта.
В рассмотренном примере передатчик 6, приемник 7 и линия 3 связи предназначены для осуществления радиосвязи. Однако в общем случае это может быть оптическая связь или связь с помощью иных электромагнитных волн, а также связь с помощью упругих волн (акустических, сжатия). Кроме того, в изобретении может быть использована и связь по проводам. Конкретный вид связи никак не влияет на существо изобретения, которое состоит в использовании оператором, управляющим объектом, сигналов обратной связи для передачи требуемых команд управления объектом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2021 |
|
RU2773550C1 |
| РАДИОСТАНЦИЯ | 2004 |
|
RU2280950C2 |
| Информационно-управляющая система центрального теплового пункта жилых общественных и промышленных зданий | 1987 |
|
SU1511751A1 |
| УСТРОЙСТВО ИЗБИРАТЕЛЬНОГО ВЫЗОВА | 2005 |
|
RU2299525C1 |
| УСТРОЙСТВО ТЕЛЕМЕХАНИКИ | 1995 |
|
RU2111546C1 |
| Система передачи и приема информации | 1987 |
|
SU1411795A1 |
| Система автоматизированного управления зоотехническими объектами | 1979 |
|
SU1242914A1 |
| Система телемеханики | 1990 |
|
SU1711216A1 |
| СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2560204C2 |
| Устройство телемеханики контролируемого пункта | 1986 |
|
SU1536421A1 |
Изобретение относится к автоматике и технике связи. Его использование в системах дистанционного управления объектами, например моделями или игрушками, позволяет увеличить число передаваемых команд без увеличения числа каналов связи. Устройство содержит на передающей стороне 1 формирователь 4 команд, модулятор 5 и передатчик 6, линию 3 связи, на приемной стороне 2 - приемник 7, демодулятор 8, первую группу исполнительных механизмов 14 и первую группу сигнализаторов 11. Благодаря введению на приемной стороне 2 формирователей 9 сигналов индикации, формирователей 10 периодического сигнала, сигнализаторов 12 второй группы, коммутаторов 13 и исполнительных механизмов 15 второй группы обеспечивается индикация на объекте заранее определенных состояний в работе этого объекта, периодическое включение и выключение установленных на объекте сигнализаторов 12 и подача заранее определенных демодулированных сигналов на соответствующие исполнительные механизмы 15 либо на входы прямого и реверсивного включения исполнительных механизмов 14 в случае, когда передача соответствующих модулированных сигналов происходит в интервалы включения соответствующих сигнализаторов 12. 2 с.п.ф-лы, 2 ил.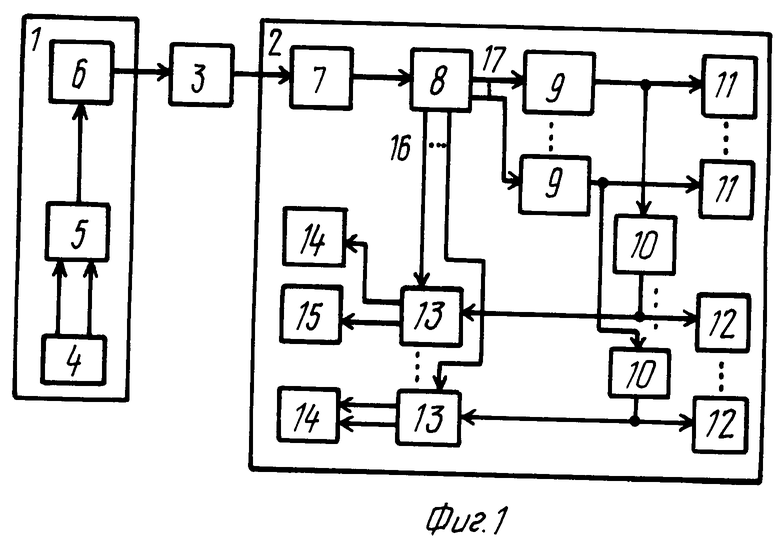
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Радиоуправляемая игрушка "Спутник-радио" | |||
| Руководство по эксплуатации | |||
| - Харьковский завод "Электроприбор", 1991. | |||
