Изобретение относится к сельскоь1у хозяйству и может быть использовано в животноводстве и птицеводстве для контроля и управления реяо-мами содер жания птицы или животных на крупных птицеводческих и животноводческих комплексах.
Известна система управления отдельными .режимами жизнеобеспечения животных, предназначенных для создания определенного климата в помещения, содержащая вычислитехеьное устройство, датчики параметров мнкрокли мата, соединенные с вычислительным устройством Сдатчики температуры и влажности), а также блок, выдающий значения скорости и расхода воздуха окружающей среды, устройство для индикации веса или возраста животных и устройство для индикации средней тем пературы тела животных, соединенные с вычислительным устройстнюм. В зависимости от данных, выдаваемых перечисленными блоками, устройствами и датчиками, вычислител};,ное устройство вырабатывает сигналы управления микроклиматом 1 .
Данная система осуществляет управ ление биоклиматическими условиями только одной группы животных, но не обеспечивает управление микроклиматом и другими условиями жизнеобеспечения нескольких изолированных групп по независимым программам и критериям.
Наиболее близкой к предлагаемой является система автоматизированного управления зоотехническими объектами, обеспечивающая центр ализован- ный контроль и управление различными режимами одновременно нескольких биозон по различным программам при минимальном количестве линий связи и содержащая первое запоминающее устройство, командное устройство, депшф ратор, блок датчиков, первый счетчик, второйсчетчик, устройство ннди кации, исполнительный механизм, устройство ручного управления, генератор импульсов, первый и второй коммутаторы, первьй, второй и третий распределители, первый и второй формирователи сигналов, второе и третье запоминающие устройства, Е ыходы которых соединены с входами устройства индикации, первые входы - соответственно с выходами второго и третьего распределителей, а вторые входы - с выходом первого счетчика.
242914г
первым входом командного устройства, а первыми входами второго и третьего распределителей и.с входом первого коммутатора, выход которого
,, соединен с выходом второго коммутатора и через первый распределитель - с первыми входами первого и второго формирователей сигналов и дещифрато- ра, подключенного вторым входом к
jQ вьпсоду командного устройства, второй вход которого подсоединен к выходу первого запоминаищего устройства, а третий вход - к третьим входам второго и третьего запоминающих уст)5 ройствJ входу второго коммутатора и выходу второго счетчика, вход которо- го через первый счетчик соединен с выходом генератора импульсов, вьтод .дешифратора через исполнительный ме- уд ханизм подключен к второму входу первого формирователя сигналов, соединенного с вторым входом третьего распределителя, выход блока датчиков через второй формирователь сигналов
подключен к второму входу второ-го распределителя, первый .выход устройства ручного управления - к четвертому входу командного устройства, а второй и третий выходы - соответст-jQ венно к вторым входам первого и второго счетчиков.
Система.управления работает сле образом,
Команды управления режимами, выра- батываемые первым запоминакшдам уст-.
- 5 ройством или устройством ручного уп равления, поступают в коман Е ное устройства, обеспечивающее поочередное прохождение команд управления и преобразование их в сигналы управления,
удо бные для передачи по лининг связи, например, в уровни постоянного напряжения. Преобразованные сигналы поступают на входы дешифраторов, расположенные в биозонах, Дешифрато 5 1)ы обеспечивают поочередное прохождение принятьэс сигналов управления к исполнительным механизмам. От исполнительных механизмов сигналы об их состоянии поступают в: первый фор- 0 мирователь, обеспечивающий очередность пррхожд,ения сигналов контроля за исполнительными механизмами. От первого формирователя сигналы контроля ЗЕ. -исполнительными механизмами,
- 5 т.е. сигналы подтверждения исполнения команд5 через линию связи поступают в третий распределитель, обес- .печивающий очередность прохождения
принятых сигналов. Аналогично через второй формирователь и линию связи во второй распределитель поступают от блока датчиков сигналы контроля режимов биозоны. От второго и третьего распределителей через второе и треть запоминающие устройства сигналы подтверждения исполнения команд и сигналы контроля режимов поступают на устройство индикации.. С помощью генератора импульсов, первого и второго счетг|иков, первого и второго коммутаторов и первых распределителей, расположенных в биозонах, осуществляется синхронизация всей системы автоматизированного управления, т.е. очередность прохождения по линиям связи команд управления, сигналов контроля режимов и сигналов подтверждения исполнения команд.
Таким образом, в известной системе управления при посылке любой команды управления исполнительному механизму, последний срабатывает не сразу, а при опросе соответствующего режима соответствующей биозоны, т.е. с задержкой. Аналогично, при изменении какого-либо контролируемого параметра в биозоне, информация об этом изменении поступает на устройство индикации, rf, соответственно, отображается им не одновременно с изменением параметра, а с задержкой. .Задержка в срабатывании исполнительных механизмов к г; поступлении информации на устройство индикации прямо пропорциональна количеству управляемых режимов и количеству биозон, т.е. возрастает при увеличении количества режимов и биозон, что является недостатком известной системы, поскольку в этом случае снижается оперативность управления и контроля объектов.
Цель изобретения - повышение оперативности управления .и упрощение системь.
Поставленная цель достигается тем, что в систему автоматизированного управления зоотехниче скими объектами, содержащую запоминающее устройст во и устройство ручного управления, подключенные выходами соответственно к пе вому и второму входам командного устройства, а также исполнительный механизм, блок датчиков,устройство инди- кации и формирователь линейных сигналов, выходом соединенный с входом распределителя, введены первый и вто
0
5
0
5
,
0
рой формирователи 4acfoTHbDc сигналов, первый и второй блоки приемников частотных сигналов и преобразователь, выходом подключенный через первый блок приемников частотных сигналов к входу исполнительного механизма, а входом - к выходу командного устройства, третий вход которого соединен с выходом первого формирователя частотных сигналов, выход исполнительного механизма подключен к первому входу второго формирователя частотных сигналов, соединенного вторым входом с выходом блока датчиков, а выходом - с входом формирователя линейных сигналов, выход распределителя подклю.чен к входу второго блока приемников частотных сигналов, соединенного выходом с входом устройства индикации и тем, что командное устройство содержит первьш сумматор, входы которого подключены к выходам преобразователей команд, каж,цый из которых содержит второй сумматор, логические блоки по числу команд, первый генератор частоты и первый модулятор, выход которого является выходом преобразо вателя команд, первьш вход подключен к выходу первого генератора частоты, а второй вход - к выходу второго сумматора, входы которого подключены к выходам логических узлов, входы которых являются входами преобразователя
.команд.
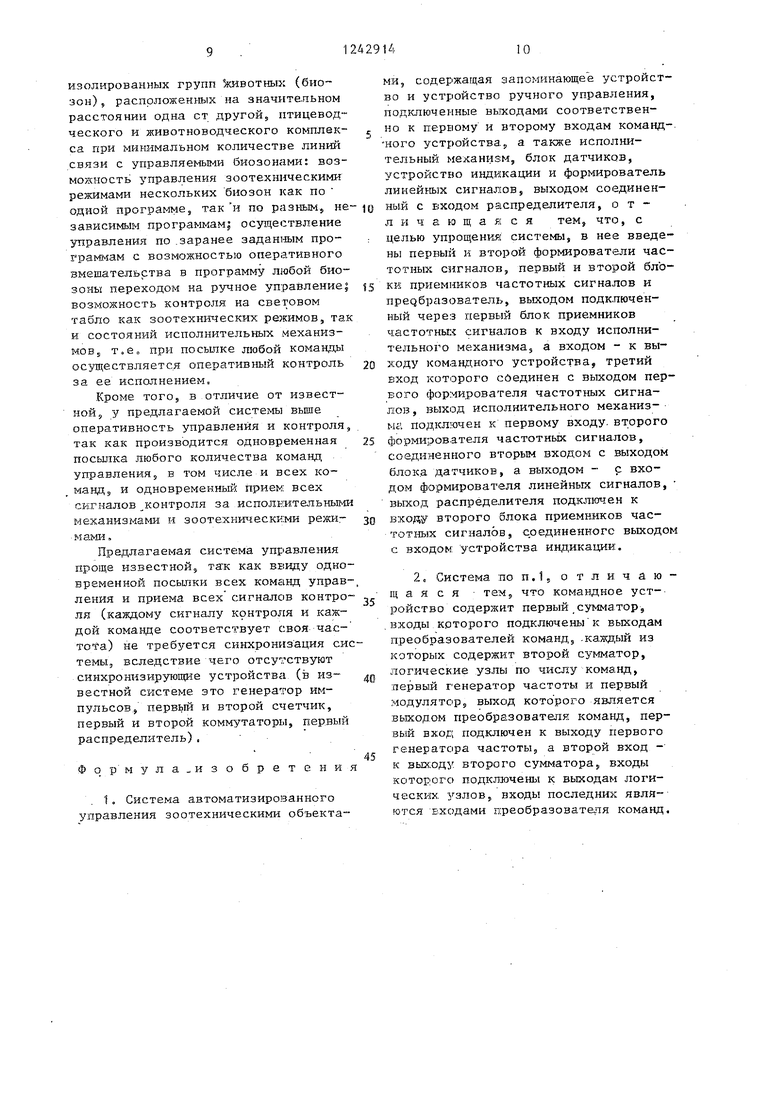
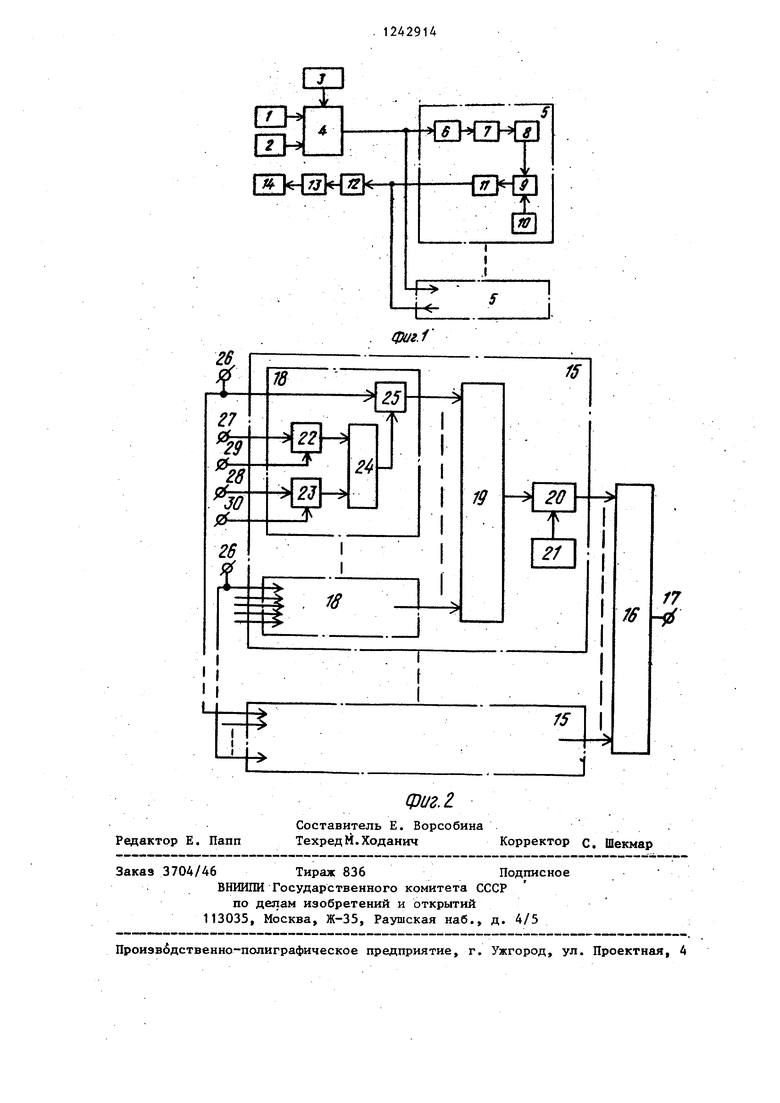
На фиг. 1 представлена структурная схема предлагаемой системы автоматизированного управления зоотехническими объектами; на фиг. 2 - структурная схема командного устройства.
Предлагаемая система управления (фиг. 1) содержит запоминающее устройство 1, устройство 2 ручного управления, первый формирователь 3 частоты сигналов, подключенные к командному устройству 4, выход которого подключен через линию связи к находящимся в биозонах 5 преобразователям 6. Выход преобразователя 6 через первый блок 7 приемников частотнЕ х сигналов подключен к исполнительным механизмам 8, связанным с вторым формирователем 9 частотных сигналов, к входам которого подключен также блок 10 датчиков. Выход формирователя 9 через последовательно соединенные формирователь 11 линейных сигналов, линию связи, распределитель 12 и вто- рой блок 13 приемников тональных
сигналов подключен к устройству 14 индикации.
Командное устройство 4 (фиг. 2) содержит преобразователи 15 команд управления режимами по числу биозон,, подключенные к входам первого сумматора 16,соединенного выходом с выходной клеммой :17 устройства 4, Каждый из преобразователей 15 содержит логические узлы 18 посылки кома:вд управления режимами по числу команд, подключенные к вxoдa з второго сумматора 19, выход которого через модулятор 20 связан с вьжодом блока 15, К модулятору 20 подключен также генератор 21 частоты. Каждый из узлов 18 содержит элементы НЕТ 22 и 23,, выходы которых через элемент ИЛИ 24 связаны с управляющим входом ключа 25, сигнальный вход которого подключен к входной клемме 26, а выход - к вы- х;оду узла 18. Входы элементов НЕТ 22 и 23 подключены к входньш клем.мам 27 и 28, а управляющие входы тех же элементов к входн М клеммам 29 и 30 соо-Тветственно
Система автоматизироваиного уп- разления работает следукщш образом,
Команды управления, вырабатываемые запоминакяцим устройством 1 устройством 25 поступают в командное устройство 4, в которое от формирователя 3 поступают таюке тональные (частотные) сигнагу, ... ; :тво которых соответствует количеству команд управления. При этом все тональные сигналы формируются фo:p fиpoвaтe- лем 3 одновременно,
В командном устройстве 4 команды управления биозонами 5 преобразуются в тойальные сигналы управления, которые затем преобразуются в сигналы управления и разделяются по частоте таким образом, чтобы управление каждой биозоной осуществлялось в своей полосе частот. С выхода командного устройства 4 сигналы управления |через линии связи поступают в био зоны 5 на преобразователи 6, оё.уще- ствляювще обратное преобразование сигналов управления в .таналы-ые сигналы управления.
От преобразователя 6 тональные сигналы управления поступают в блок 7-, на выходах которого фор шруются команды управления исполнительными . механизмами 8, соответствующие сигналам управления данной биозоной.
0
5
0
5
0
От исполнительных механизмов 8 и от блока 10 Б формирователь 9 поступают сигналы контроля состояний исполнительных механизмов и зоотехни - чс-.ских режимов бнозоны. Формирователь 9 формирует на своем выхода сетку тональных сигналов по числу контролируемых состояний исполнительных механизмов и режимов одной биозоны, причем каждому -состоянию каждого исполнительного механизма и каждому режиму соответствует один, отличный от других, тональньш сигнал, С выхода формирователя 9 сигналы поступают в формирователи 11, где. преобразуются в линейные сигналы контроля таким образом, что контроль к.аждой б Аозоны осуществляется в своей полосе частот,
От формирователей 11 через линию связи линейные сигналы контроля поступают „в распределители 12, осуществляющие обратное преобразование ли- нейных сигналов контроля в тональные сигналы контроля и последующее их распределение по соответствующим группам блока 13 С выходов блока 13 сигналы контроля состояний исполнительных механизмов и зоотехнических режмьюЕ биозон 5 Поступают на устрой- ство 14 индикации,
Расс1чютрим подробнее работу пре,ц- лагаемой систег.; управления зоот.ехНЙЧЗСКИМ5-: :, . .- ЭМИ.
Команды управления от запоминающего устройства. 1 поступают через входные клемм1.5 27 на элементы,.НЕТ 22, а от устройства 2 рзгчного управления - через входные- клеммы 28 на элеме нты НЕТ 23 узлов 18. Элементы НЕТ 22 и 23 осуществляют, при подаче чер ез вхоД ные 29 и 30 на их входы Нет соответствующих сигналов, выбор режима управления; автоматического или , ручного. От.элемента НЕТ 22 или 23 команда через элемент ИЛИ 24 подается на управляющий вход ключа 25, открывая его. На входные клеммы 26 всех узлов 18 от выходных клемм формирователя 3 поступают тональные скгналЫр причем каждой команде уп-г равленик .соответствует свой тональньзй сигнал5 отличный по частоте от других.
Через открытые ключи 25 тональные сигналы, соответствующие посылаемым командам управления, поступают на входы сумматора 19, осуществляющего суммирование тональных сигналов, соответствующих всем посьшаемым командам управления в данную бисзону. С выхода, сумматора 19 тональные сигналы подаются на первьй вход мо- дул }тора 20, на второй вход которого от генератора 21 частоты поступает опорный сигнал. Количество генераторов 21 равно числу управляемых био- зон, причем каждый генератор 21 вырабатывает свою частоту. Частоты опорных сигналов различаются таким образом, чтобы на выходах модуляторов 20 и, соответственно, на выходах блоков 15 преобразования команд, формировались сигналы управления, различные для каждой биозоны, т.е. сигналы управления биозонами передаются в различных полосах частот, и каж- дои биозоне соответствует своя полос частот.
Например, опорные сигналы имеют частоты f 0; f кГц; 3 12 кГц; f;j 16 кГц и т.д., а модуляторы 20 осуществляют преобразование по закону
f ЬЫХ f СП вК
где f iyj( - частота выходного сигна- ,. . ла;
f|)( - частота входного сигнала;fon - частота опорного сигнала.
Тогда сигнал управления первой биозочой представляет собой непосредственно тональные сигналы, частоты которых находятся в полосе 1 - 3 кГц. Сигналы управления второй био зоной лежат в полосе 5-7, третьей 9-11, четвертой 13-15 кГц и т.д. С выходов блоков 15 сформированные сигналы управления через сумматор 16, осуществляющий суммирование всех сиг налов управления биозонами, поступаю на выходную клемму 17.
-.
Таким образом производится неза- 1висимая посылка команд управления в любом сочетании, в том числе и одновременная посылка всех команд.Команды управления от запоминающего устройства 1 или устройства 2 ручного управления поступают на исполнительные механизмы ,8 всех био- зон 5 независимо одна от другой, в том числе и одновременно на все исполнительные механизмы.
g 10 15 20
5
0
5
5
Контрольные выходы исполнитель- .ных механизмов 8, а также выходы .блока 10 датчиков соединены с входами формирователя 9. На выходах формирователей 11 сигналов формируются линейные сигналы контроля, занимающие свою полосу частот для калодой биозоны. Например, для первой биозоны частота опорного сигнала равна нулю, т.е. линейный сигнал контроля первой биозоны представляет собой непосредственно тональные сигналы контроля, занимающие полосу частот от 1 до 3 кГц,для второй биозоны частота опорного сигнала равна 8,для третьей 12,для четвертой 16 кГц и т.д.
Выходные клеммы всех биозон 5 соединены одной линией с входной клеммой распределителя 12, на который поступают линейные сигналы конт роля от всех биозон. Далее линейные сигналы контроля поступают в преобразователи на фильтрукщие устройства, осуществляющие, отфильтровывание линейных сигналов контроля данной биозоны от линейных сигналов контроля других биозон. Отфильтрованные линейные сигналы контроля с помощью демодулятора и генератора частоты преобразуются обратно в тональные сигналы контроля, занимающие полосу частот 1-3 кГц.
Таким образом, на выходных клеммах распределителя 12 формируются тональные сигналы контроля каждой биозоной, поступающие далее на соответствующие группы приемников, количество которых равно числу биозон, блока 13 приемников, т.е. на входы приемников, количество которых в каждой группе равно числу контролируемых состояний исполнительных механизмов и режимов одной биозоны.
При приеме приемником частотного сигнала на его выходе формируется соответствующий сигнал контроля, поступающий далее на устройство индикации 14, причем прием всех сигналов контроля производится одновременно.
Таким .образом, предлагаемая система управления, как и известная, обеспечивает: централизованный и оперативный контроль и управление зоотехническими режимами нескольких
изолированных групп Животных (био зон)5 раслрложенных на значительном расстоянии одна ст другойj птицеводческого и животноводческого комплек- са при минимальном количестве линий связи с управляемыми биозонами: возможность, управления зоотехническими режимами нескольких биозон как по одной программе, так и по разным не зависимым программам| осуществление управления по , заранее задан1-И)М про- граммам с возможностью оперативного вмешательства в программу любой биозоны переходом на ручное управление возможность контроля на световом табло как зоотехнических резшмов, так и состояний исполнительных механизмов j т.е. при посылке любой команды осуществляется оперативный контроль за ее исполнением.
Кроме того, в отличие от известной у предлагаемой системы вьше оперативность управления и контроля, так как производится одновременная посылка любого количества команд управления; в том числе и всех команд и одновременный прием всех сигналов контроля за исполнительными механизмами и зоотехническими режи- мани.
Предлагаемая система управления проще известной, так как ввиду одновременной посылки всех команд управления и приема всех сигналов контро- ля (каждому сигналу контроля и каждой команде соответствует своя час- тота) не требуется синхрониз ация системы, вследствие чего отсутствуют синхронизирующие устройства (в из- вестной системе это генератор импульсов,, первьгй и второй счетчик, первый и второй коммутаторы, первый распределитель),
Фо рмула изобретения
. 1 о Система автоматизированного управления зоотехническими объектас, ц : 5 0
5 о
5 Q
5
ми, содержагдая запоминающее устройство и устройство ручного управления, подключенные вьжодами соответственно к первому и второму входам команд-. кого устройства,, а также исполни- тельнь й механизм, блок датчиков, устройство индикации и формирователь линейных сигналов, выходом соединенный с входом распределителя, отличающая с я тем, что, с целью упрощения; системы, в нее введены первый и второй формирователи частотных сигналов, первый и второй блоки приемников частотных сигналов и предбразователь, выходом подключенный через первый блок приемников частотньк сигналов к входу исполнительного механизма, а входом - к выходу команд,ного устройства, третий вход которого соединен с выходом первого формирователя частотных сигналов , выход исполнительного механиз- - мй подключен к первому входу, второго формиров.ателя частотных сигналов, соединенного вторым входом с выходом блок.а датчиков, а выходом - с входом формирователя линейных сигналов, выход распределителя подключен к входу второго блока приемников час- TOTHbiX сигналов, срединенногс выходом с входом устройства индикации.
2с Система по n.l, отличающаяся тем5 что командное уст-- ройство содержит первый сумма-тор, входы которого подключены к выходам преобразователей команд, .каждый из которых содержит второй сумматор, логические узлы по числу команд, первый генератор частоты и первый модулятор, выход которого является выходом преобразователя команд, пер- вьзй вход подключен к выходу первого генератора частоты, а второй вход - к выхюду второго сумматора, входы которого подключены к выходам логи- 4ecKiitx. узлов, входы последних являются входами преобразователя команд.
Редактор Е. Папп
фиг.2.
Составитель Е. Ворсобина
ТехредМ.Ходанич Корректор с. Шекмар
Заказ 3704/46 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Проиэвбдственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного управления зоотехническими объектами | 1979 |
|
SU1040467A2 |
| Система автоматизированного управления зоотехническими объектами | 1978 |
|
SU989535A1 |
| Система автоматизированного управления зоотехническими объектами | 1979 |
|
SU1030772A2 |
| Устройство для дистанционного контроля дуплексных стационарных радиостанций | 1986 |
|
SU1403384A1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2503564C1 |
| Система телемеханики | 1990 |
|
SU1711216A1 |
| СИСТЕМА ТЕЛЕСИГНАЛИЗАЦИИ СТАЦИОНАРНЫХ И МОБИЛЬНЫХ ОБЪЕКТОВ | 1998 |
|
RU2143745C1 |
| Устройство для дистанционного контроля дуплексных стационарных радиостанций | 1987 |
|
SU1517139A1 |
| Система поездной радиосвязи | 1989 |
|
SU1693730A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ДОКУМЕНТАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2223608C2 |
Изобретение относится к области автоматики и; может быть использовано для контроля и управления режимами содержания птицы или животных на крупных птицеводческих и животноводческих комплексах. Цель изобрете ния - упрощение системы. Достигается она введением первого и второго формирователей частотных сигналов, преобразователя и первого и второго блоков приемников частотных сигналов. В данной системе производится одновременная посылка любого количества команд управления, в том числе и всех команд, и одновременный прием всех сигналов контроля за исполнительными механизмами и зоотехническими режимами. 1 з.п. ф-лы, 2 ил. ю 4 tsd со
| Автоматическая система управления кормораздатчиками | 1975 |
|
SU563946A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматизированного управления зоотехническими объектами | 1978 |
|
SU989535A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
