Изобретение относится к области подводно-технических работ, а именно к подъему объектов, находящихся под водой.
Известна система устройства для подъема объектов, находящихся под водой, содержащая понтоны, один или несколько подъемных тросов с грузозахватным узлом, направляющие тросы для наведения на объект.
Указанная система не в полной мере обеспечивает надежности работы в условиях больших глубин и сложных течений, т.к. двух торцовых направляющих канатов не достаточно, чтобы удержать движущийся захват от проворота вокруг продольной оси; равновеликие по объему понтоны при нарушении дифферента от смещения центра тяжести не удержат объект в гнезде захвата. При наличии нескольких жил в пучке троса-захвата (под воздействием усилий на весь пучок сразу) не обеспечивается равномерная нагрузка на каждую жилу, сами гибкие направляющие канаты не могут надежно избежать спутывания в условиях сложных подводных течений. Имеется конструктивная возможность значительно поднять всплытий объект к поверхности акватории.
Цель изобретения повышение надежности системы, обеспечение строгой направленности и устойчивости ее при доставке к объекту и всплытии с ним, обеспечение равномерности нагрузок на силовые канаты.
Поставленная цель достигается тем, что в системе для подъема объекта, находящегося под водой, содержащем подъемные тросы с грузозахватным узлом в виде двух петель, образованных подъемным тросом закрепленным по форме горизонтальной восьмерки, перекрестье которой скреплено свободно установленной втулкой, а ветви продеты через втулки, разделяющие крепление понтонов, понтон, выполненный со связью с источником газа и сообщением его пространства с окружающей средой, соединенный с подъемным тросом, два направляющих троса для доставки подъемного троса к объекту, на верхнем конце каждого из которых закреплен поплавок, а на нижнем узел его крепления на объекте, выполненный в виде направляющей треноги для петель подъемного троса с возможностью охвата объекта посредством ее штанг, петли захватного устройства образованы пучками тросов подъемного каната, соединенными в торцах поперечными стяжками для образования захватных сеток (полотенец) и размещенными по бокам в ограничительных втулках, в промежутках которых к каждому тросу пучка присоединены избирательно группы понтонов, выполненных разновеликими по объему с нарастанием последнего от центра подъемного троса к его торцам. Нижние петли сеток соединены гибкими тягами, пропущенными через окна закрепленных на крайних втулках кронштейнов с промежуточными втулками.
Направляющие тросы выполнены в виде соединенных гибкими звеньями подпружиненных втулок, имеющих снизу заходный раструб для фиксации на смежной втулке собранных в нерабочем положении в пучок, стянутый разрывным звеном.
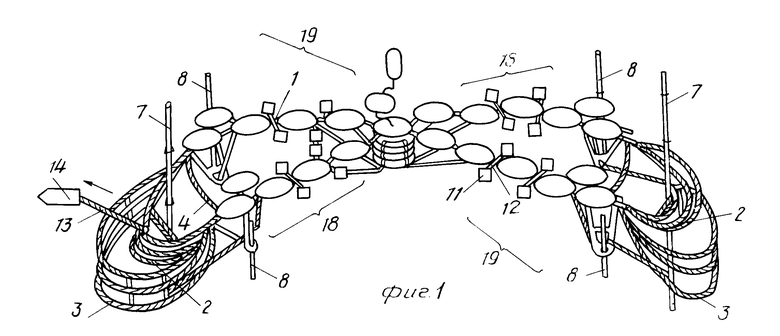
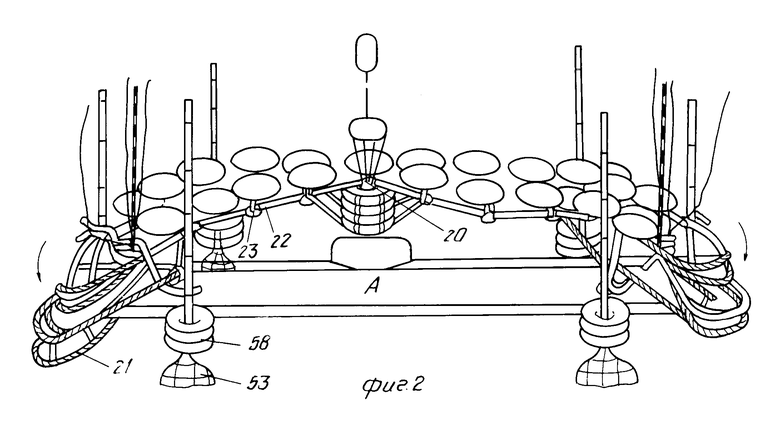
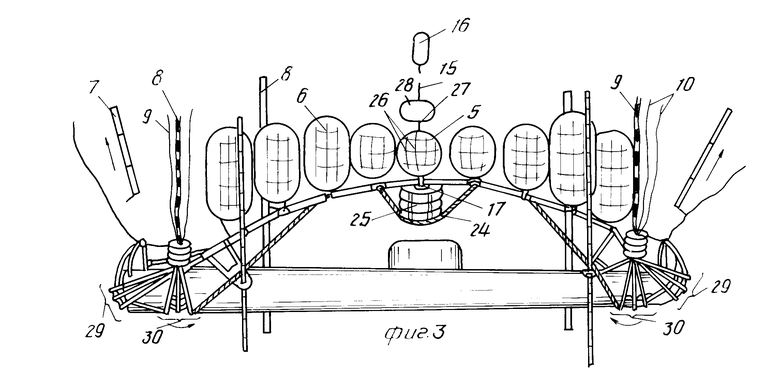
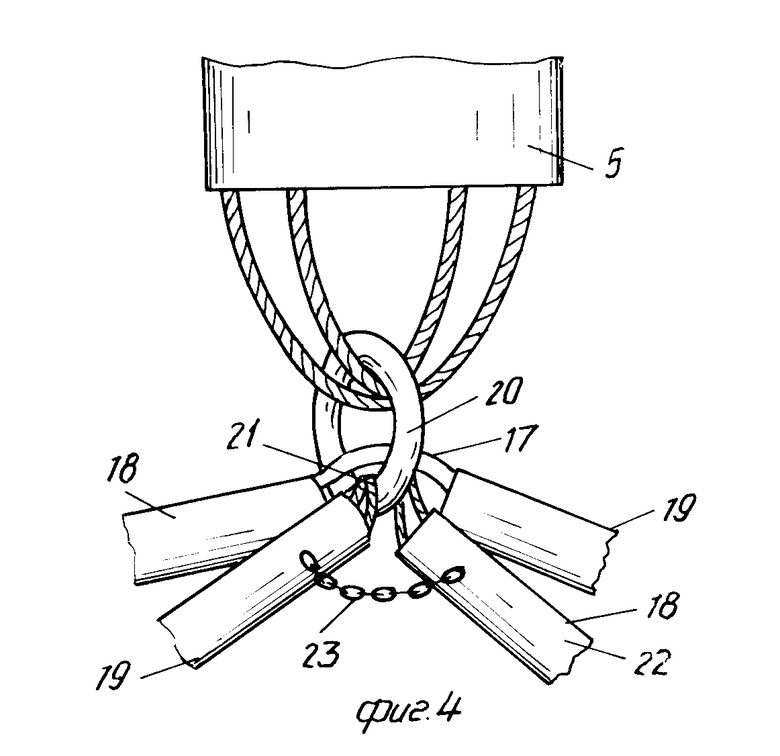
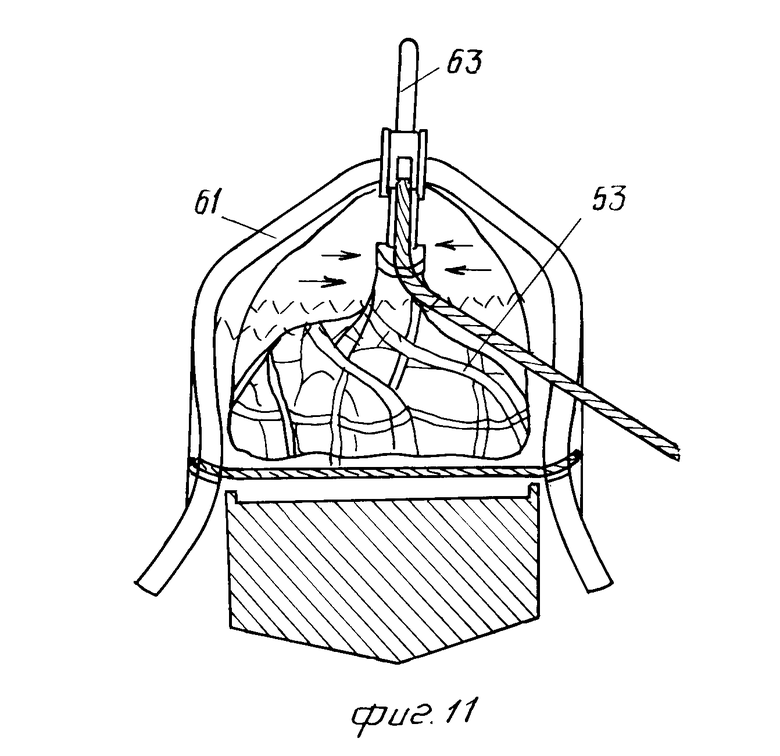
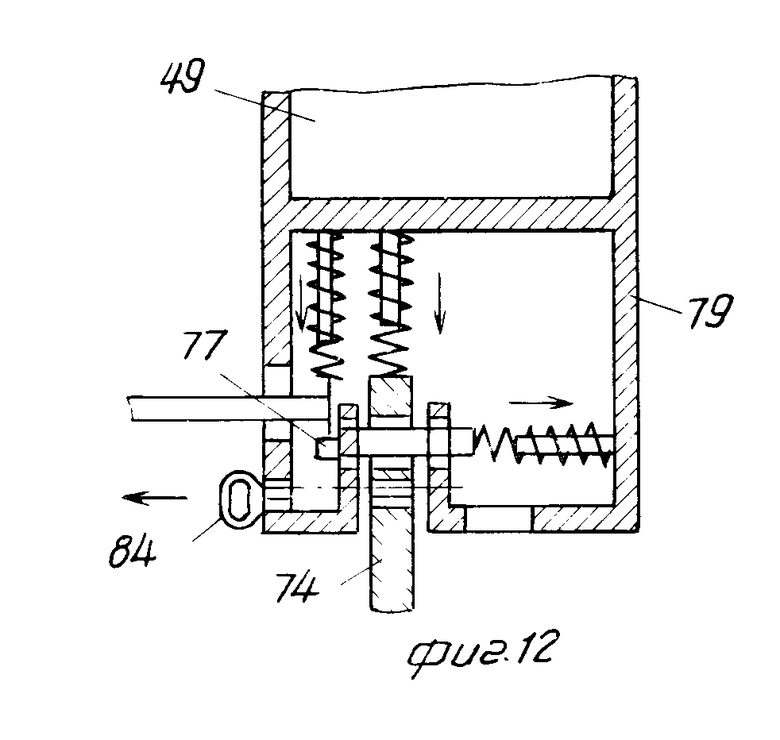
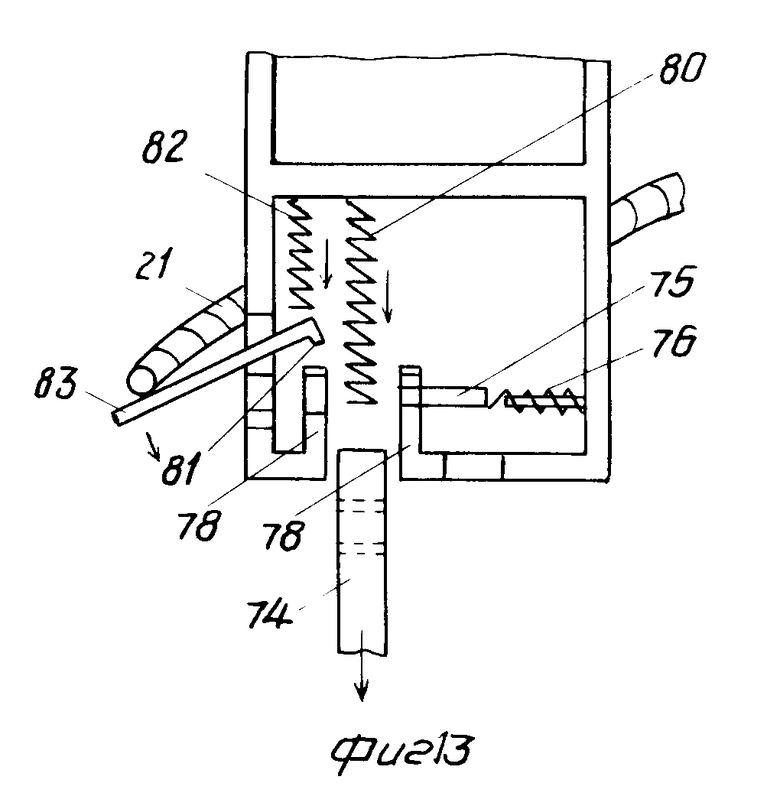
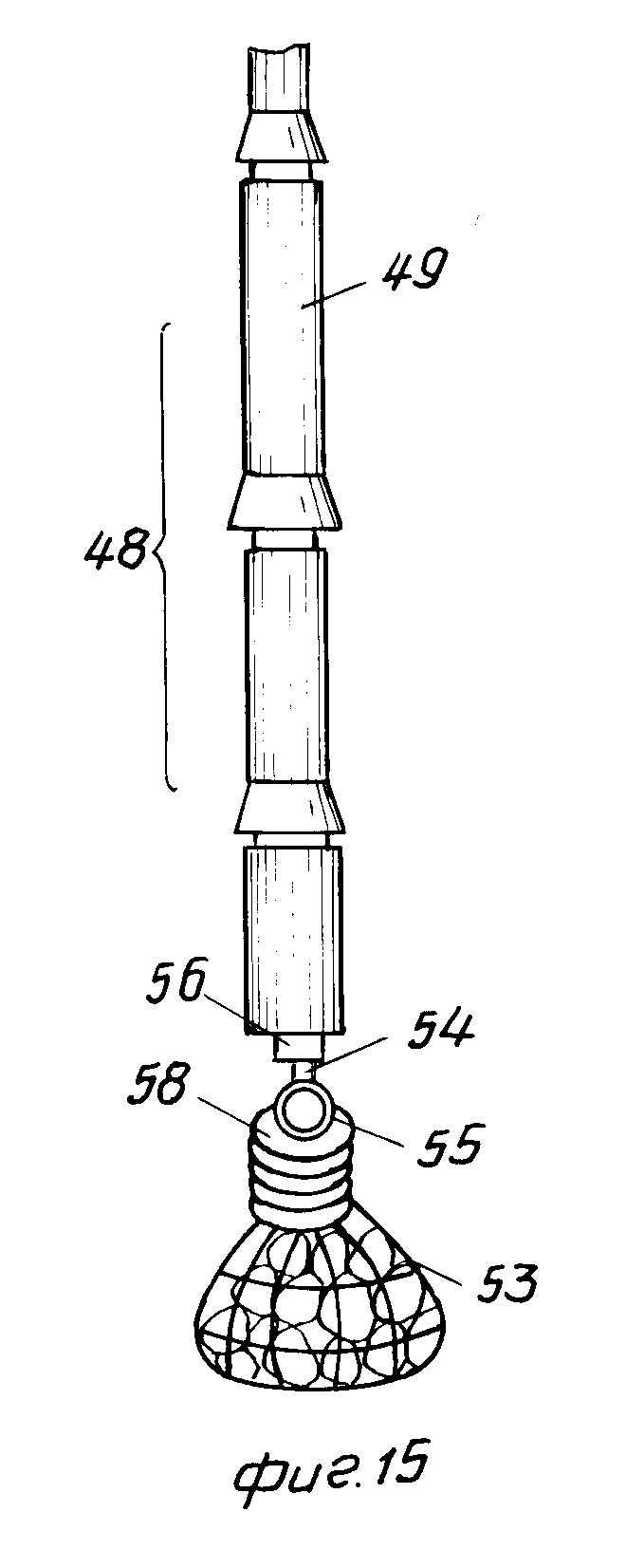
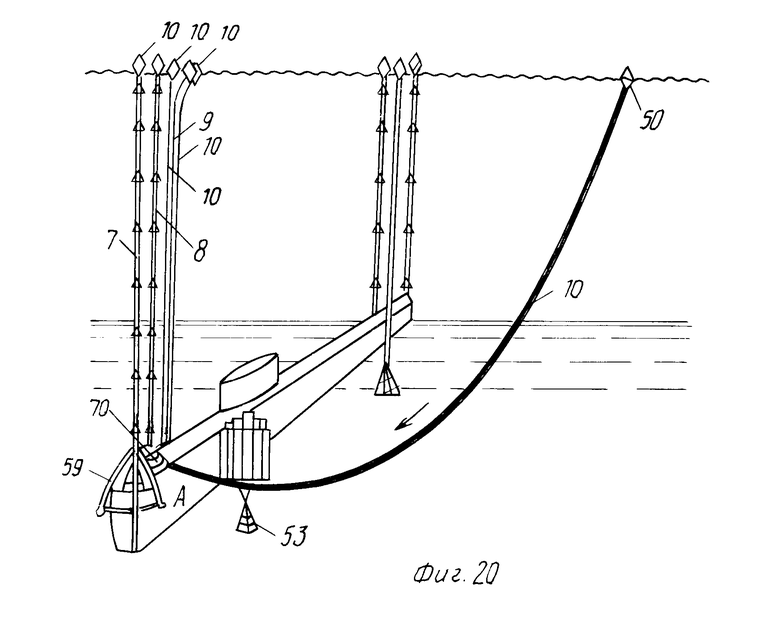
На фиг. 1 показана система для подъема объекта, находящегося под водой, аксонометрия; на фиг. 2 то же, при опускании на объект; на фиг. 3 то же, во время подъема с захваченным объектом; на фиг. 4 центральное перекрестье подъемного троса; на фиг. 5 торцовый узел подъемного троса; на фиг. 6 то же, при выполнении рабочей функции; на фиг. 7 взаимодействие захватной петли, жесткого пластыря и судовой обшивки; на фиг. 8 установленная торцовая направляющая; на фиг. 9 раскрытие направляющей; на фиг. 10 узел треноги торцовой направляющей, аксонометрия; на фиг. 11 то же, план (со стороны объекта); на фиг. 12 отстегивающее устройство направляющей, разрез, контакт замкнут; на фиг. 13 то же, контакт разомкнут; на фиг. 14 то же, установка главного стопора; на фиг. 15 нижнее основание боковой направляющей; на фиг. 16 укладка направляющей; на фиг. 17 колено направляющей с вырезом; на фиг. 18 узел соединения сигнального и спусковых концов; на фиг. 19 доставка укладки торцовой направляющей к объекту; на фиг. 20 установленные направляющие, общий вид.
Система для подъема объекта, находящегося под водой, содержит подъемный трос 1 (фиг. 1-3) с захватами 2, несущими 3 петлями и удерживающей перемычкой 4, соединенные с ним центральный 5 и боковые 6 понтоны, направляющие торцовые 7 и боковые 8 для движения подъемного троса 1 к объекту А и всплытия с ним, а также сигнальные концы 9 и сблокированные с ними спусковые концы 10 для доставки к объекту А направляющих 7 и 8.
Для обеспечения одновременности спуска всех элементов подъемного троса 1 и облегчения монтажа на плаву имеются парные поплавки 11 с дистанционно размыкаемыми перемычками 12 и сцепка 13 к буксировщику 14. Для контроля местонахождения системы имеется конец 15 с визирным шаром 16.
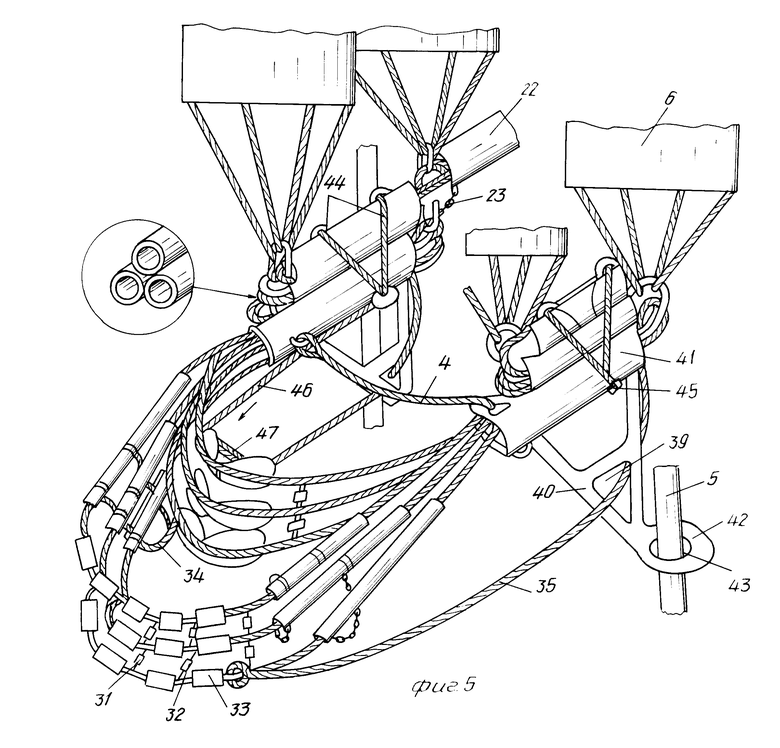
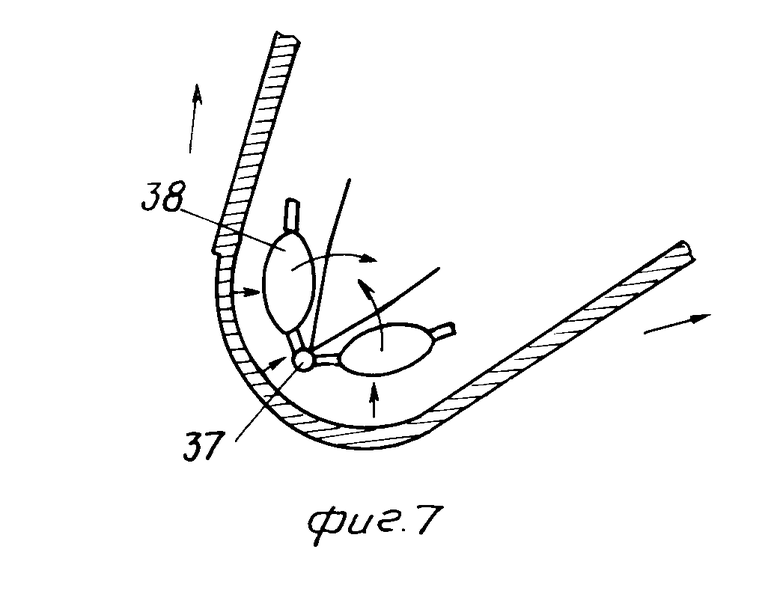
Подъемный трос 1 выполнен в виде горизонтально расположенной восьмерки, образованной перекрестьем 17 ветвей 18 и 19 зафиксированным кольцевым зацепом 20 (фиг. 4) центрального понтона 5. Ветви 18 и 19 образованы пучками составляющих их стропов 21, заключенных в последовательно размещенные втулки 22, соединенные от съезжания гибкими связями 23. В промежутках между втулками 22 избирательно к одинарным стропам 21 присоединены соответствующие понтоны 6. Для натяжения ветвей 18 и 19 после захвата торцов объекта А захватными петлями 2 на растяжках 24 от ветвей 18 и 19 установлен амортизатор 25. Через стропы 26 центрального понтона 5 и крепежный конец 27 прикреплен вытягивающий поплавок 28, к которому последовательно присоединен конец 15 с визирным шаром 16. Соединенные на торцах встречным наложением стропов 21, как на фиг. 5, 6, ветви 18 и 19 образуют захватные 2 и несущие 3 петли. С целью равномерности распределения нагрузок захватные петли 2 и несущие 3 выполнены в виде гибких полотенец 29 и 30, образуемых сетками из стропов 21 с образующими ячейки перемычками 31, закрепленными для предотвращения сбегания в разделительные втулки 32, 33, одновременно выполняющих функцию роликов при заведении полотенец 29 и 30 под объект А и увеличивающие опорную площадь. Для вытягивания полотенец 29, 30 и предохранения их от скручивания имеются оттяжные канаты 34 и 35. Для предотвращения съезжания полотенец 29 захватных петель 2 на их одиночных стропах 21 установлены шарнирные жесткие пластыри 36, выпуклостями соединенных шарнирно 37 щек 38 и под действием давления натянутых стропов 21, обжимающих скуловую обшивку форштевня и кормы поднимаемого объекта А. Удерживающая перемычка 4 предохраняет петли 2 от выхода за габарит объекта А по вертикали при накидывании на него.
Для затягивания несущих петель 3 под объект предназначен оттяжной канат 35 в роли гибкой тяги, пропущенной через окно 39 кронштейна 40, закрепленного на крайних втулках 41 ветвей 18 и 19 одним концом зацепленный за крайний строп 21 несущей петли 3, а другим за одну из промежуточных втулок 22. Для обеспечения строгой направленности движения системы вдоль направляющих 8 к объекту А и с ним при всплытии на кронштейнах 40 имеются проушины 42 с отверстиями 43, куда продеваются направляющие 8. Для обеспечения выполнения функции затягивания несущей петли 3 три крайние втулки 22 и 41 до накидывания захватных петель 2 при опускании на объект А уложены внахлест, как на фиг. 5, и обвязаны стяжкой 44, размыкаемой стопором 45, механическим приводимом в действие тросовой тягой 46, сблокированной с захватной 2 петлей в виде хорды 47, закрепленной неподвижным концом на одну из перемычек 31 с проскальзыванием через другую так, чтобы натяжением тяги 46 от воздействия на хорду 47 произошло размыкание стопора 45.
Для максимального уменьшения дифферента и крена при подъеме понтоны 5, 6 выполнены разновеликими с нарастанием объема от центрального 5 к торцам и бортам 6.
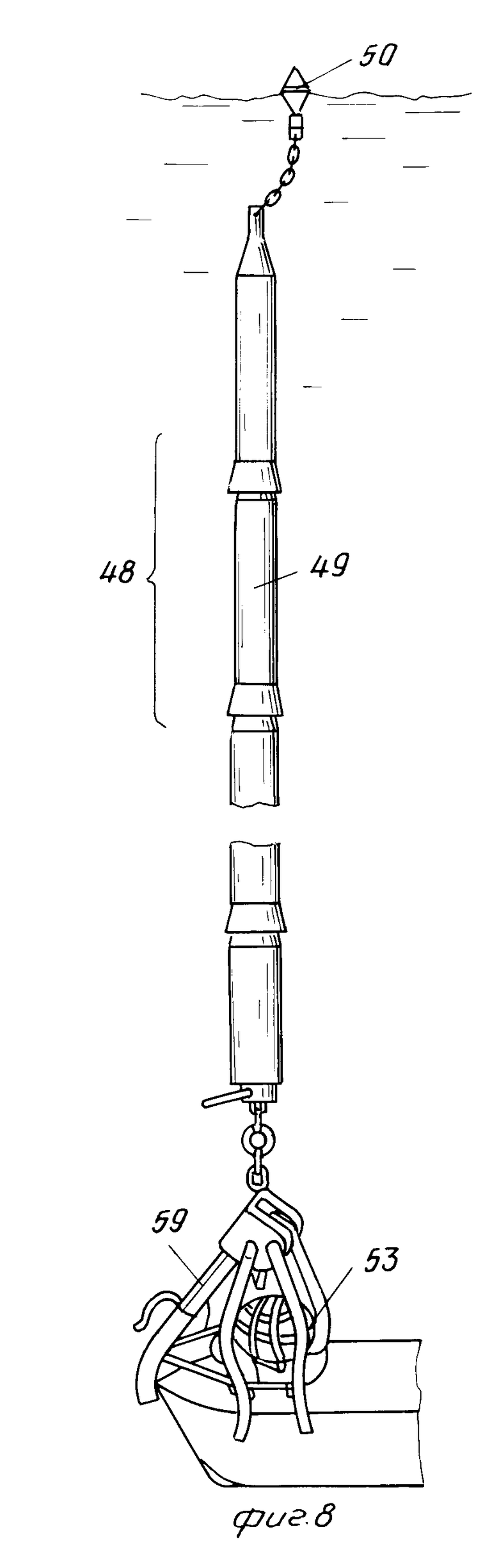
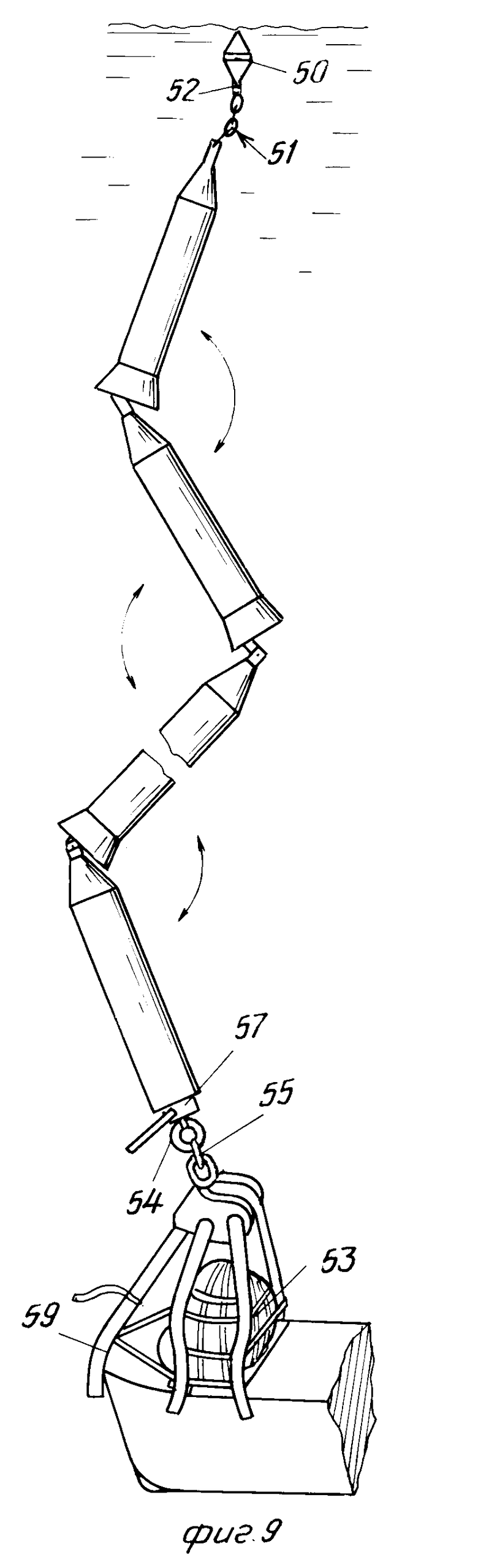
Направляющие 7 и 8 выполнены в виде плавучих вертикальных колонн 48, состоящих из последовательно соединенных и зафиксированных цилиндрических секций 49. В верхней части на поверхности акватории направляющие 7, 8 имеют поплавки 50 на гибкой связи 51 с замком 52, а в нижней балласт 53 на гибкой связи 54, снабженной кольцом 55 для обеспечения доставки направляющих с помощью спусковых концов 10.
Направляющие торцовая 7 и боковая 8 имеют отличия в устройстве оснований внизу. Боковые 8 для отсоединения имеют отстреливающие устройства 56, торцовые отстегивающее устройство 57, боковые имеют амортизаторы 58, торцовые снабжены треногами 59 для обвода захватными петлями 2 торцов объекта А при накидывании. Для большей устойчивости балласт 53 выполнен в виде канатной сетки с сыпучим грузом, например валунами.
В целях придания максимальной устойчивости торцовой направляющей 7 в основании тренога 59 выполнена из торцовой 60 и боковых стоек 61, соединенных кронштейном 62 и снабжена зацепом 63. Для обвода корпуса торца объекта А захватными петлями 2 стойки 60 и 61 выполнены пирамидально с расширением от основания колонны 48 вниз. Для придания треноге 59 жесткости имеются жесткие 64 и гибкие 65 стяжки, шарниры 66 и пружины 67. Для стабилизации положения в пространстве во время доставки к объекту на торцовой стойке 60 имеется рулевой конец 68. С помощью зацепа 63 и гибкой связи 54 тренога соединена с колонной 48. Кроме этого, для увеличения устойчивости тренога 59 сблокирована с балластом 53. Для обеспечения заведения балласта 53 на палубу 69 имеются амортизатор 70 с отверстием 71 для продевания сквозь него спусковых концов 10, установленный на верхней палубе 69, при этом стойки 60, 61 нижними обрезами должны быть ниже уровня палубы 69, для чего в целях регулировки высоты подвеса балласта 53 имеются регулировочный 72 и стопорный 73 концы. Вертикальный габарит балласта меньше, чем у амортизатора 70. В целях освобождения от торцовых направляющих 7 после выполнения ими функции по заведению захватных петель 2 за торцы объекта А на нижней секции 49 колонны 48 имеется рычажное отстегивающее устройство 57, внутри которого замыкается звено 74 гибкой связи 54.
Отстегивающее устройство 57 имеет главный стопор 75 с пружиной 76 и отверстием 77, установленный на проушинах 78 корпуса 79 внутри, а для уменьшения вибрации вставного звена 74 имеется пружина 80. В замкнутом состоянии стопор 75 заблокирован с помощью отверстия 77, удерживающего в нем загиба 81 пружиной 82 рабочего рычага 83 и предохранительной чекой 84.
Для облегчения доставки направляющих 7 и 8 имеются спусковые концы 10. Колонны 48 в транспортном положении уложены в пучок 85, образованный укладкой секций 49 внахлест, скрепленной гибкой стяжкой 86 дистанционно размыкаемой стопором 87. Укладка секций 49 обеспечивается перегибом имеющейся между ними гибкой связи 88 (пружины). Узел стыковки между секциями 49 выполнен в виде раструба 89 секции с имеющимся на дне его каналом 90 с креплением 91 для пружины 88 и затягиваемым в него этой пружиной конуса 92 смежной секции с заходящим в канал 90 цилиндром 93, снабженным креплением 94 для стягивающей пружины.
Подъем объекта с помощью системы осуществляют следующим образом.
На обнаруженном объекте для обозначения его торцов до начала работ должны быть выставлены сигнальные концы. С помощью вспомогательных подъемно-плавучих средств (не показано) посредством сигнального конца 9 и под собственной тяжестью готовый амортизатор, например, собранных из автопокрышек отверстием 71 нанизанный на этот конец 9 опускается на объект А. К амортизатору 70 заранее подсоединены спусковые концы 10, а отверстие 71 снабжено защелкой одностороннего движения каната конца 9.
После опускания на объект А амортизатора 70 от него в соответственные стороны отводятся спусковые концы 10, продеваются через кольца 55 гибких связей 54 направляющих 7, 8 в транспортном положении, после чего под собственной тяжестью направляющие 7 и 8 опускаются в указанные местоположения. Торцовые направляющие 7 на верхнюю палубу 69 торцов объекта А, боковые на грунт дна акватории в непосредственной близости к объекту А. При опускании торцовой направляющей 7 последняя по концу 10 движется к вершине амортизатора 70 и за счет меньшей, чем у амортизатора, высоты габарита балласта 53 беспрепятственно заходит на палубу 69, задерживаясь в своем движении стойками 60 и 61 длиной, большей, чем высота амортизатора 70. Правильность положения в пространстве треноги 59 в движении обеспечивается рулевым концом 68.
После того, как балласты 53 и треноги 59 заняли свои места, на стопоры 87 укладки 85 подается установленный сигнал на размыкание стяжки 86, и укладка (пучок) 85 под действием сил плавучести секций, их соединений и силы удерживающей колонну 48 на гибкой связи с балластом 53 и преобразуется в колонну 48, расположенную вертикально. При стягивании секций 49 пружинами 88 последняя затягивает конус 92 с цилиндром 93 в раструб 89 с каналом 90 смежных секций, и цилиндр 93 с каналом 90 образуют замок. Все установленные направляющие обладают плавучестью положительной и свободно вращаются на связи 54. Поскольку воздействия течений влияют на всех них одновременно, то в отклонении направляющие 7 и 8 синхронны, отклоняются одинаково и обеспечивают направленное движение системы вниз и вверх.
Направляющие отсоединяются: торцовые 7 нажатием стропой 21 рычага 83 отстегивающего устройства 57, боковые отстреливающего 56. Направляющие установлены 7, 8, верхние поплавки 50 на поверхности обозначают их положение в соответствии с местоположением поднимаемого объекта А. Доставка направляющих 7 и 8 и балластов со спусковыми концами 10 может обеспечиваться подводным манипулирующим средством (не показано) при его наличии.
После выполнения перечисленных операций с помощью подъемно-плавучих вспомогательных средств и буксировщика 14 на поплавках 11 с гибкими дистанционно-приводными перемычками 12 монтируется с понтонами 5 и 6 и транспортируется посредством зацепа 13 подъемный трос 1 к месту работы. На месте работы производится продевание направляющих 7 и 8 через элементы подъемного троса 1 для движения его к объекту А. Направляющие торцовые 7 заводятся в пространство между захватными петлями 2 и удерживающими перемычками 4, а боковые 8 заводятся в отверстия 43 проушин 42 кронштейнов 40. Для заведения указанных элементов используются гибкие связи 51 и замки 52. С готовностью системы к спуску по направлению к объекту подъема А на стопоры перемычек 12 подается общий сигнал для одновременного размыкания, и система под действием силы тяжести направляется к объекту А. Двигаясь вдоль параллельно установленных жестких направляющих 7 и 8, подъемный трос 1 удерживает свое положение в пространстве. Набрав инерцию падения, трос 1, проскальзывая захватными петлями 2 через контуры стоек 60 и 61 треноги 59, производит захват форштевня и кормы объекта А, амортизатор 25 после упора в любую, находящуюся против него точку объекта, отталкивается от нее, и с помощью поплавка 28 производится натяжение ветвей 18, 19. Одновременно с захватом торцов объекта А петлями 2 скуловой обшивкой форштевня (кормы) объекта А производится прижатие хорды 47 тросовой тяги 46, что приводит к размыканию стопора 45, и уложенные внахлест втулки 41 и 22 под действием натяжения ветвей 18 и 19 расходятся и занимают свое положение, став составной частью указанных ветвей. Втулка 22, за которую зацеплена тяга, оттяжкой канат 35 смещается от торца объекта А и натягивает оттяжной канат 35, который подтягивает несущие петли 3 к заведению под днище объекта А. Используемый для работы оттяжного каната 35 кронштейн 40 с падением на амортизатор 58 проушиной 42 после прокручивания вокруг оси восстанавливает свое положение с помощью удерживающей перемычки 4, которая одновременно удерживает захватные петли 2 от инерционного проскакивания за габарит высоты торца объекта А. С натяжением ветвей 18 и 19 натягиваются и составляющие их стропы 21, хотя бы даже и отдельные из них, в том числе и участки захватных петель 2, где установлены жесткие пластыри 36, обоюдно выпуклые щеки 38 которых, прижимаемые натягиваемыми стропами 21, закрепляют захватные щеки 21 от вертикального смещения. Полностью они приводятся в рабочее положение при работе всей системы. Дополнительно к указанной роли пластыри увеличивают площадь опоры на скуловую обшивку. С выполнением указанных операций завершается предварительный захват объекта А и производится натяжение подъемного троса 1, после чего понтоны 5 и 6 заполняются газом.
С набором газа понтонами 5 и 6, достаточным для всплытия, объект А отрывается от грунта, натянутые ранее оттяжные канаты 35 заводят опорные петли 3 под днище объекта А, что обеспечивает окончательный захват его. Закрепление понтонов 6 за отдельные стропы 21 обеспечивает полное участие каждой из них в общей нагрузке в распределении на захватные и несущие петли 2 и 3. Разный объем понтонов 6 с нарастанием от центра 5 в стороны и к торцам вследствие вывешивания объекта А на четырех точках обеспечивает независимость системы от крена и дифферента с приданием максимальной устойчивости.
С учетом уменьшения внешнего давления и возможностью расширения газа в зависимости от этого для обеспечения всплытия должен заполняться объем понтонов частично, однако достаточно, чтобы при повторном опускании под воду после всплытия обеспечить повторное всплытие без дополнительных усилий.
Таким образом, преимуществами устройства являются:
самопроизвольная строповка объекта канатами с максимальной эффективностью распределения нагрузок на них;
обеспеченность выполнения операций в условиях сильных внешних воздействий, например, течений;
максимальная устойчивость при малой зависимости от смещения центра тяжести объекта, крена и дифферента его;
минимальные потребности во вспомогательных средствах при выполнении операций;
способности изменения параметров в зависимости от потребностей применения, конфигурации и размеров объекта, а также глубины его местонахождения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ НА ПЛАВУ ОБЪЕКТА | 1991 |
|
RU2013294C1 |
| Устройство Ю.Н.Кунгурцева для подъема затонувшего объекта из донного грунта | 1990 |
|
SU1710436A1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1993 |
|
RU2061623C1 |
| ГАЗОГЕНЕРАТОРНОЕ УСТРОЙСТВО Ю.Н.КУНГУРЦЕВА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 1990 |
|
RU2050304C1 |
| ВЕРТИКАЛЬНАЯ ПЛАВУЧАЯ КОЛОННА Ю.Н.КУНГУРЦЕВА | 1990 |
|
RU2035350C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2012 |
|
RU2479460C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| САМОСПАСАТЕЛЬ БОБРОВСКИХ ДЛЯ ЭКСТРЕННОЙ САМОЭВАКУАЦИИ ЧЕЛОВЕКА С ВЫСОТНЫХ НАЗЕМНЫХ И НАДВОДНЫХ ОБЪЕКТОВ, ЧЕРЕЗ ОКНО, С БАЛКОНА (ЛОДЖИИ) ЖИЛЫХ ДОМОВ, ПРОМЫШЛЕННЫХ И ОФИСНЫХ ЗДАНИЙ, А ТАКЖЕ ДЛЯ РУЧНОЙ, АВТО- И АВИАТРАНСПОРТИРОВКИ ОБЕЗДВИЖЕННЫХ ПО РАЗНЫМ ПРИЧИНАМ ЛЮДЕЙ | 2007 |
|
RU2372952C2 |
| МЕХАНИЧЕСКИЙ САМОСПАСАТЕЛЬ БОБРОВСКИХ | 2009 |
|
RU2401140C1 |
| Устройство для застропки и подъема плавающего объекта | 1985 |
|
SU1440840A2 |



Использование: для подъема с больших глубин затонувших объектов. Сущность изобретения: система содержит подземный канат с понтонами и захватными и несущими петлями заводимыми под затонувший объект оттяжными канатами. 3 з.п. ф-лы, 20 ил.
| Авторское свидетельство СССР N 1624892, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
