Изобретение относится к измерительной технике и может быть использовано для контроля массы жидкости в резервуарах, например нефти и подобных продуктов.
Известно устройство для измерения массы жидкости в резервуаре, содержащее поплавок, имеющий высоту, равную изменению уровня жидкости в резервуаре, датчик выталкивающей силы с частотным выходом, преобразователь и регистратор [1]
Известно также устройство для измерения уровня жидкости в резервуаре, содержащее погружаемый в жидкость поплавок с высотой, перекрывающей диапазон изменения уровня, пневмосиловой преобразователь выталкивающей силы и измерительный блок [2]
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для измерения уровня (массы) жидкости, содержащее корпус, преобразователь выталкивающей силы и погружаемый в жидкость чувствительный элемент постоянного сечения и высоты, равной диапазону изменения уровня жидкости в резервуаре, связанный тягой с установленным в опорах валом преобразователя выталкивающей силы, на котором одним концом закреплен упругий элемент (пластина), другой конец которого закреплен на корпусе. Упругий элемент снабжен экстензометрическим датчиком [3]
Общими недостатками описанных устройств является ограниченная точность и низкая чувствительность измерений, снижающиеся с увеличением верхнего предела измерений. Причиной этого является независимость диапазона изменения выходного сигнала используемых пневматических [2] и частотных [1] и [3] преобразователей выталкивающей силы от предельных значений уровня жидкостей в резервуарах, определяемых их высотой. Так, например, пневмосиловой преобразователь [2] измерительный диапазон которого постоянен 1:5 (от 0,02 до 0,1 МПа), приходится использовать в парке резервуаров, верхние пределы измерений в которых имеют диапазон от 0,02 до 16 м, т.е. 1:800. Максимальная деформация упругого элемента [1, 3] и максимальная высота подъема буйка [2] остаются постоянными независимо от предельных уровней жидкости в резервуарах.
В устройствах [2, 3] сечение буйка выбирается (вес его остается неизменным) в зависимости от предельного значения уровня жидкости, например, 42 мм (при уровне 400 мм), 6 мм (при уровне 16000 мм) и т.д. Можно видеть, что в той же мере уменьшается и выталкивающая сила. Таким образом, чем больше диапазон измерения уровня жидкости в резервуаре, тем в большей степени возрастает погрешность и снижается чувствительность устройств.
Цель изобретения заключается в повышении точности и стабилизации чувствительности во всем диапазоне изменения уровня жидкости в резервуаре путем обеспечения во всем диапазоне изменения уровня жидкости в резервуаре пропорциональности изменения высоты подъема чувствительного элемента изменению уровня жидкости, например 1:10.
С этой целью в известном устройстве, содержащем корпус и чувствительный элемент буек постоянного сечения, связанный тросом с преобразователем перемещения буйка, состоящим из передаточного механизма и индикатора, передаточный механизм выполнен в виде вала, установленного в опорах, на конце которого жестко закреплен блок с перекинутым через него тросом, а соосно валу расположена пружина кручения, один конец которой жестко закреплен на валу, второй на корпусе.
Кроме того, предлагаемое устройство отличается тем, что с целью расширения диапазона измерений, буек и пружина выполнены секционными, при этом секции пружины выполнены разной жесткости с возможностью отключения каждой из них, а секции буйка выполнены с возможностью соединения их между собой.
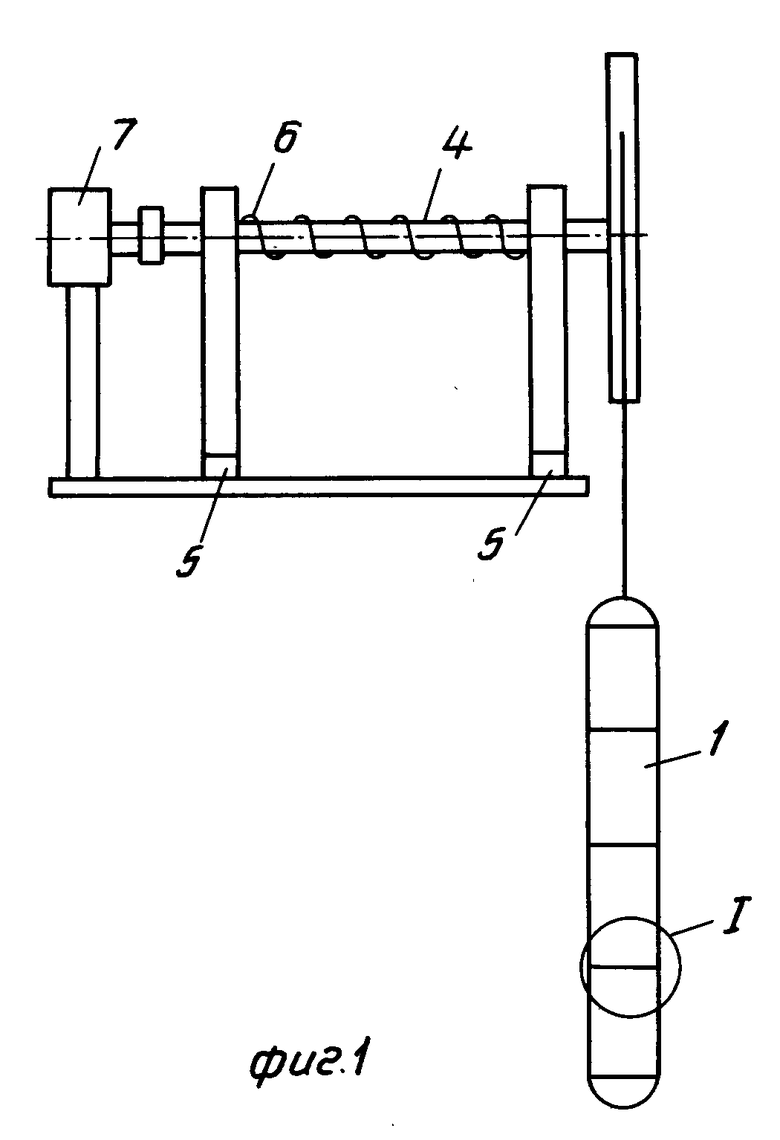
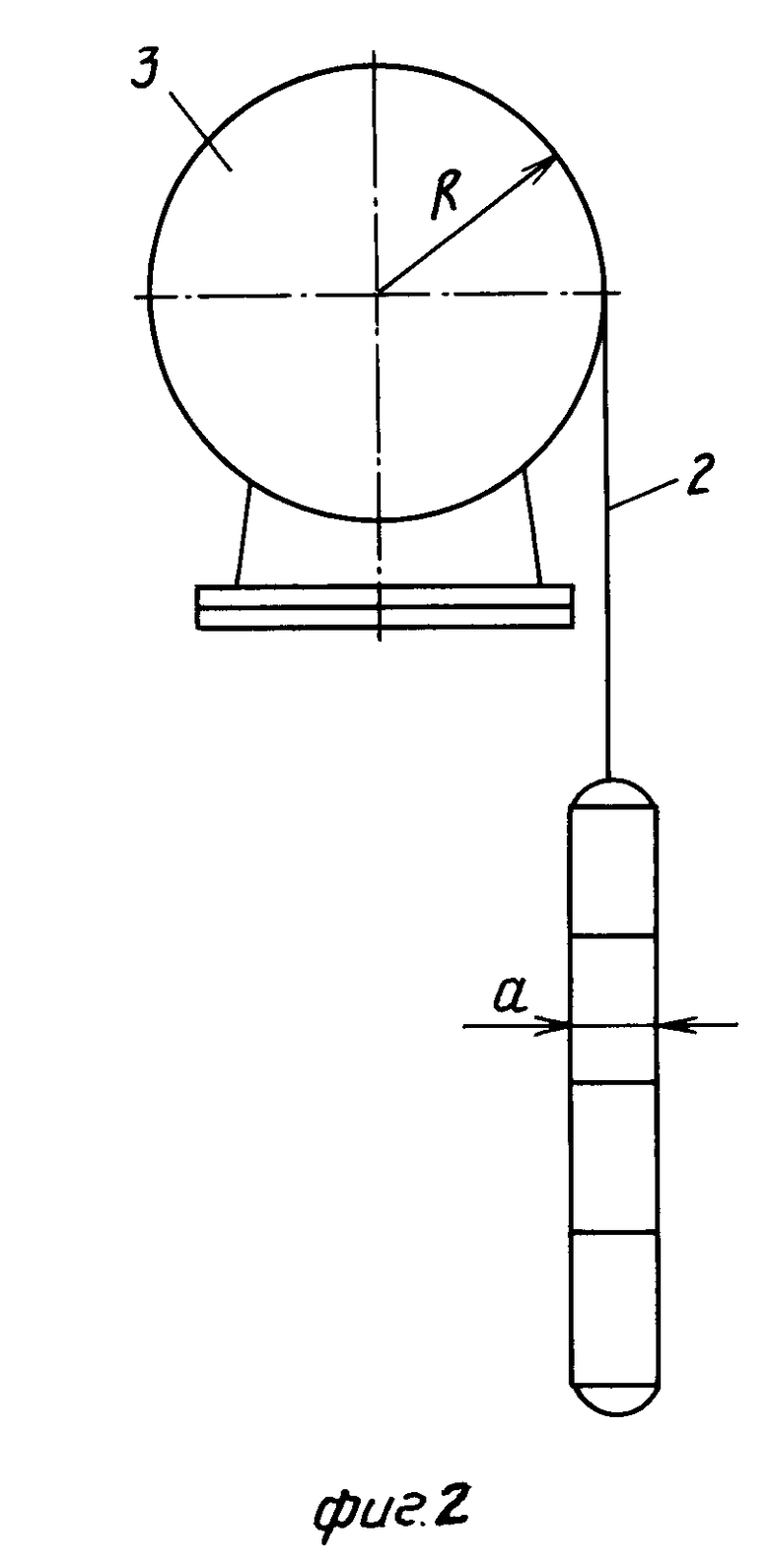
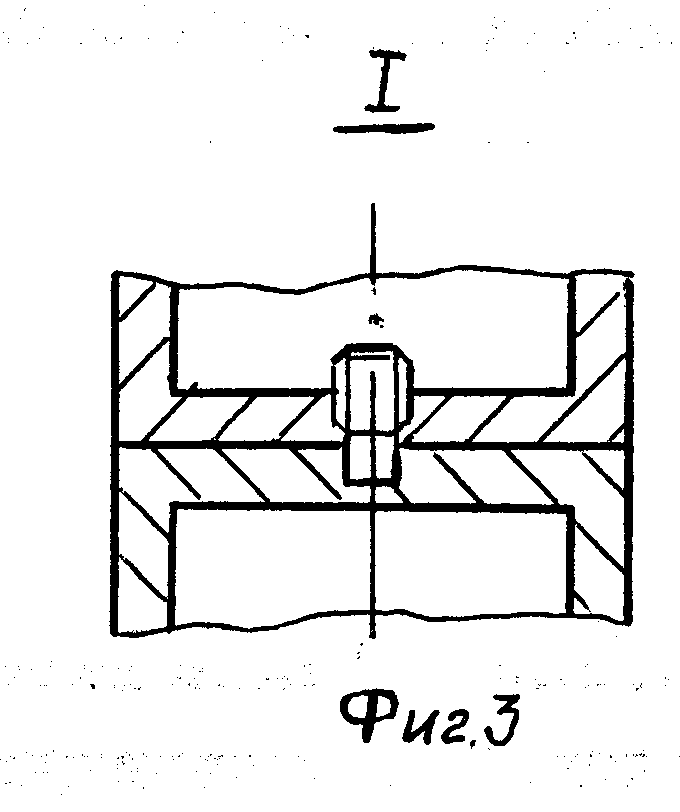
На фиг. 1, 2 представлена принципиальная схема предлагаемого устройства для измерения массы жидкости в резервуаре; на виг. 3 узел I на фиг. 1.
Устройство содержит передаточный механизм: чувствительный элемент буек 1 постоянного сечения, погруженный в жидкость, масса которой в резервуаре (не показан) измеряется, и тросом 2 через блок 3 соединенный с валом 4, установленным в опорах 5. На валу 4 установлен упругий элемент, состоящий из самостоятельных секций пружин 6, работающих на кручение. Один конец каждой пружины 6 закреплен на валу 4, а другой на корпусе (не показан) устройства. Пружины 6 могут быть спиральными и цилиндрическими. Первые из них рассчитаны, главным образом, на значительные диапазоны изменения уровня жидкости в резервуаре. Жесткость и ход каждой из пружин 6, установленных последовательно на валу 4 и соосно с ним, известны. Вал 4, точнее один торец его, соединен жестко с перфорированным диском (не показан) фотоэлектрического датчика 7.
Буек состоит из нескольких секций разной длины, соединяемых однотипно в любой их комбинации, общая их длина перекрывает наибольший из диапазонов изменения уровня жидкости в резервуаре, при этом длина наименьшей секции соответствует диапазону изменений уровня в наименьшем из резервуаров парка.
Настройку устройства осуществляют следующим образом. Предположим, требуется настроить устройство для измерения массы жидкости в резервуаре с верхним пределом измерения (наполнения) 2 м. В соответствии с этим составляют из секций буек 1, длина которого должна быть 1,8 м, например: 4 х 0,2 м + 1 м, и водвешивают его в резервуаре на тросе 2. При отсутствии жидкости в резервуаре буек 1 занимает крайнее нижнее положение и регистрирующее устройство (не показано) показывает "0". При этом на валу 4 должна быть включена в работу пружина (пружины) такой жесткости, чтобы она оказалась максимально закрученной. Уравнение равновесия системы буек-пружина можно записать:
θmax ˙ C mб ˙ g ˙ R, (1) где θmax максимальная деформация пружины или максимальный угол закручивания вала, соответствующая данной нагрузке (массе буйка);
g ускорение силы тяжести;
R радиус блока;
mб масса буйка;
С жесткость пружины на кручение.
При наполнении резервуара жидкостью возникает выталкивающая сила, воздействующая на чувствительный элемент (буек 1), который при этом поднимается. Высота подъема буйка при изменениях уровня жидкости в резервуаре зависит как от массы буйка (которая, в свою очередь, зависит от высоты данного резервуара или точнее, от диапазона изменения уровня жидкости в нем), так и от силы противодействия весу буйка со стороны. Моменты, создаваемые пружиной и выталкивающей силой, складываются, что позволяет увеличить максимальную высоту подъема буйка при данном значении уровня жидкости в резервуаре. Подбором пружины, кроме того, добиваются пропорциональности высоты подъема буйка и высоты уровня жидкости в резервуаре. Опытным путем определено, что в максимальной степени достижению поставленной цели соответствует пропорциональность 1:10, т.е. допустим при повышении уровня жидкости в резервуаре на 1 м буек поднимется на 10 см, при повышении уровня на 2 м на 20 см и т.д.
Соблюдение условий других значений пропорциональности либо приводит к увеличению температурной погрешности (1: 5), либо повышение точности и чувствительности становится незначительным (1:15, 1:20).
Подбор пружины по величине создаваемого момента с целью получения упомянутой пропорциональности оказывается более точным при выполнении пружины секционной, при котором на валу размещаются ряд самостоятельных пружин, имеющих различную жесткость и возможность отключения каждой из них (выведения конца пружины из зацепления с корпусом).
Секции буйка разной длины соединяются между собой при помощи быстросъемных болтов в набор, длина которого соответствует определенному резервуару, т.е. диапазону изменения уровня жидкости в резервуаре.
Для определения массы жидкости в вертикальном резервуаре по показаниям датчика 7 имеем расчетную зависимость (уравнение равновесия системы буек-жидкость-пружина при уровне Н жидкости в резервуаре
ρ ˙ g ˙ S(H h)R + θC mб ˙ g ˙ R, (2) где ρ плотность жидкости.
S площадь поперечного сечения буйка;
Н уровень жидкости в резервуаре;
h высота подъема буйка (расстояние от днища резервуара или от высоты мертвой полости, если буек опускается до высоты мертвой полости до нижнего торца буйка).
Поскольку величины, входящие в (2), известны, масса буйка может быть определена по формуле
mб ρ ˙ S(H0 h0) ρ S ˙ H0(1 k0), (3) где k0 коэффициент пропорциональности.
коэффициент пропорциональности.
По формуле (1) при известных значениях величин: θmax, mб, R определяется жесткость пружины С.
В такой последовательности рассчитывается масса буйка и формируются его секции для других резервуаров в зависимости от предельных уровней жидкости в них.
Масса жидкости, находящейся в вертикальном резервуаре при произвольном уровне Н, определяется по формуле
M  · ρ · H (4) где М масса жидкости в резервуаре, соответствующая уровню Н;
· ρ · H (4) где М масса жидкости в резервуаре, соответствующая уровню Н;
D внутренний диаметр резервуара;
ρ плотность жидкости.
Выталкивающая сила, действующая на буек при уровне жидкости Н, определяется по формуле
F ρg  (H-h), (5) где d диаметр буйка;
(H-h), (5) где d диаметр буйка;
h высота подъема буйка.
Из выражения (5) находим
ρH  , (6) где k
, (6) где k  коэффициент пропорциональности, соответствующий уровню жидкости Н и высоте подъема буйка h. Его значение при изменении уровня жидкости в резервуаре остается постоянным и равным k k0 (см. формулу (3)).
коэффициент пропорциональности, соответствующий уровню жидкости Н и высоте подъема буйка h. Его значение при изменении уровня жидкости в резервуаре остается постоянным и равным k k0 (см. формулу (3)).
Подставновка равенства (6) в зависимость (4) дает
M  ·
·  . (7)
. (7)
Выталкивающую силу F в этой формуле можно выразить через деформацию пружины или через высоту подъема буйка h в виде
F μ ˙ h, (8) где μ сила выталкивания, приходящаяся на 1 м высоты подъема буйка.
Тогда выражение (7) с учетом зависимости (6) и (8) получает вид
M  ·
·  . (9)
. (9)
Полученное выражение предназначено для определения массы так называемой стандартной жидкости, т. е. жидкости, по характеристикам которой спроектировано предлагаемое устройство.
Для измерения массы жидкости, отличающейся по плотности от стандартной, формула (9) после некоторых преобразований получает вид:
M  · m
· m 1 +
1 +  ·
· 
 , (10) где ρ*, k0*
, (10) где ρ*, k0* плотность и параметр относительного перемещения буйка для стандартной жидкости, значения которых задаются при проектировании предлагаемого устройства;
плотность и параметр относительного перемещения буйка для стандартной жидкости, значения которых задаются при проектировании предлагаемого устройства;
ρ плотность хранимой жидкости;
h высота подъема буйка (преобразуемая фотоэлектрическим преобразователем в электрические импульсы, при наполнении резервуара хранимой жидкостью).
Как уже было установлено выше, величина k* k0*  входящая в формулу (9), не зависит от уровня жидкости.
входящая в формулу (9), не зависит от уровня жидкости.
Так, например, если предельный уровень жидкости Н0 1 м и предельная высота подъема буйка равна 0,1 м, то k0 0,1 м, а при Н0 10 м и h0 1 м k0 = 0,1 и т.д.
= 0,1 и т.д.
Отсюда следует, что чувствительность предлагаемого устройства не зависит от уровня жидкости.
Как следует из выражения (10), масса жидкости, измеряемая с помощью предлагаемого устройства, является функцией:
M f(D, d, mб, ρ, h). (11)
В соответствии с зависимостями (11) основная погрешность массомера жидкости (в) может быть определена по формуле ± 1,1
± 1,1 100 (12)
100 (12)
Численные значения слагаемых под корнем этого выражения при значениях d 0,1 м; Δd ± 0,01 ˙ 10-3 м; mб 20 кг; Δmб ± 0,003 кг; ρ*= ρ 800 кг/м3; Δρ ± 0,5 кг/м3; k0* 0,1; h 0,1 м; Δh ± 0,1 ˙ 10-3 мм равно соответственно:
2  ± 0,00044; 2
± 0,00044; 2  ± 0,0002;
± 0,0002;  ± 0,00015;
± 0,00015; ± 0,000063;
± 0,000063;  ± 0,001
± 0,001
Тогда основная погрешность устройства жидкости равна ± 1,1
± 1,1 1,1·0,11 ± 0,12%
1,1·0,11 ± 0,12%
Предлагаемое устройство позволяет получить выходной сигнал, пропорциональный значению уровня жидкости в резервуаре, повысить точность и чувствительность измерений, а также стабилизировать эти показатели во всех возможных диапазонах изменения уровня (массы) жидкости в резервуаре. (56) 1. Авторское свидетельство СССР N 634110, кл. G 01 F 23/06, 1975.
2. Уровнемеры буйковые пневматические типа УБ-П. Техническое описание и инструкция по эксплуатации, 1976.
3. Патент Франции N 1561834, кл. G 01 F 23/06, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЖИДКОСТИ В РЕЗЕРВУАРЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2548926C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И ПЛОТНОСТИ | 1991 |
|
RU2047845C1 |
| УСТАНОВКА ДЛЯ ПОВЕРКИ УРОВНЕМЕРОВ ЖИДКОСТИ | 1995 |
|
RU2086929C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-ХИМИЧЕСКИХ ПАРАМЕТРОВ ВОДОНЕФТЯНОЙ ЭМУЛЬСИИ | 1991 |
|
RU2006823C1 |
| Уровномер | 1972 |
|
SU505892A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 2013 |
|
RU2534423C2 |
| Уровнемер | 1977 |
|
SU669199A1 |
| УРОВНЕМЕР ДЛЯ ЖИДКОСТЕЙ | 1991 |
|
RU2010183C1 |
| Автоматический весомер | 1961 |
|
SU152083A1 |
| Способ измерения массы жидкости в резервуаре произвольной конфигурации | 2021 |
|
RU2791960C2 |
Использование: изобретение относится к средствам измерения массы жидких продуктов, находящихся в резервуарах, например нефти и т.п. Сущность изобретения: устройство содержит корпус, преобразователь выталкивающей силы и погружаемый в жидкость чувствительный элемент постоянного сечения и высоты, равной диапазону изменения уровня жидкости в резервуаре, связанный тросом с установленным в опорах валом преобразователя выталкивающей силы, на котором одним концом закреплен упругий элемент, другой конец которого закреплен на корпусе. Упругий элемент выполнен в виде пружины, работающей на кручение, например спиральной, установленной на валу соосно с ним. Пружина выполнена самостоятельными секциями, например разной жесткости, установленными с возможностью отключения каждой из них, а также чувствительный элемент выполнен состоящим из секций, например, равной длины с возможностью соединения их между собой в заданном наборе. 1 з.п. ф-лы, 3 ил.
| Устройство адресации к памяти | 1987 |
|
SU1561834A3 |
