Изобретение относится к робототехнике и может быть использовано в машиностроении и других отраслях для захвата деталей с выпуклыми поверхностями.
Известно захватное устройство, содержащее корпус и захватные элементы, закрепленные на нем [1]
Ограниченные функциональные возможности являются недостатком этого устройства.
Известно захватное устройство, содержащее корпус и захватные элементы, закрепленные на нем [2]
Ограниченные функциональные возможности являются недостатком этого устройства.
Наиболее близким по технической сущности к изобретению является захватное устройство, содержащее корпус и захватные элементы, концами закрепленные на корпусе [3]
Недостатком этого устройства являются ограниченные функциональные возможности.
Целью изобретения является расширение функциональных возможностей за счет изменения жесткости захвата в процессе выполнения технологических операций.
Это достигается тем, захватное устройство, содержащее корпус и гибкие захватные элементы, концами закрепленные на корпусе, снабжено вакуумированной системой и по числу захватных элементов полыми эластичными оболочками, заполненными сыпучим материалом, кроме того, оболочки выполнены герметичными, своими концами закреплены на корпусе, а их полости соединены с вакуумированной системой, при этом каждый захватный элемент расположен в соответствующей эластичной оболочке, захватные элементы выполнены в виде нерастяжимого элемента.
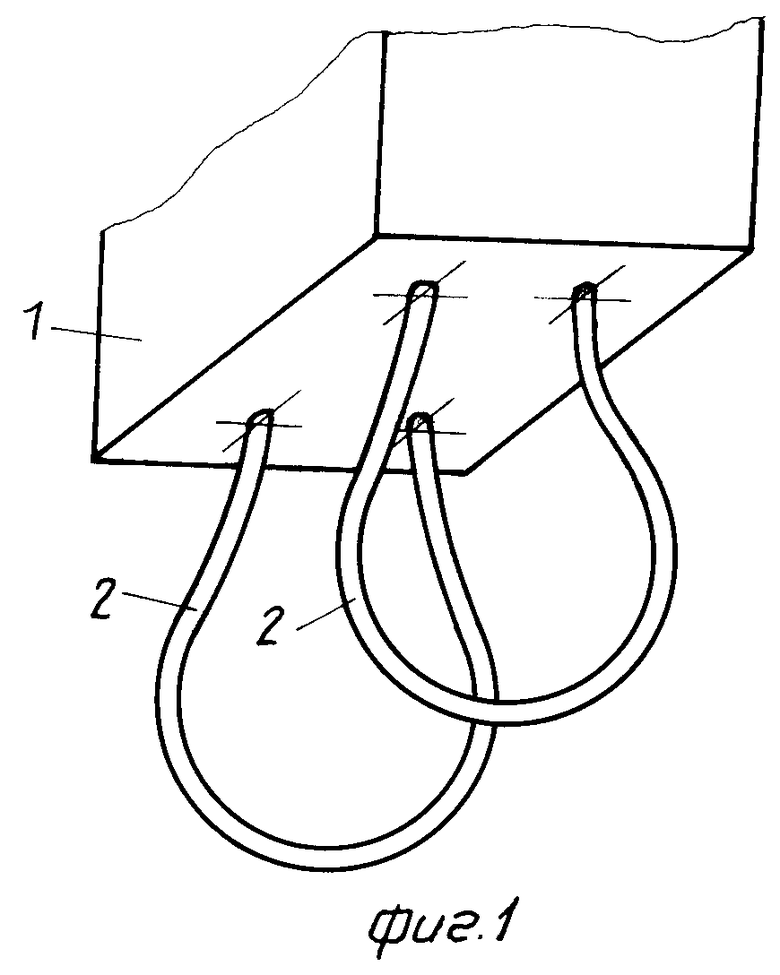
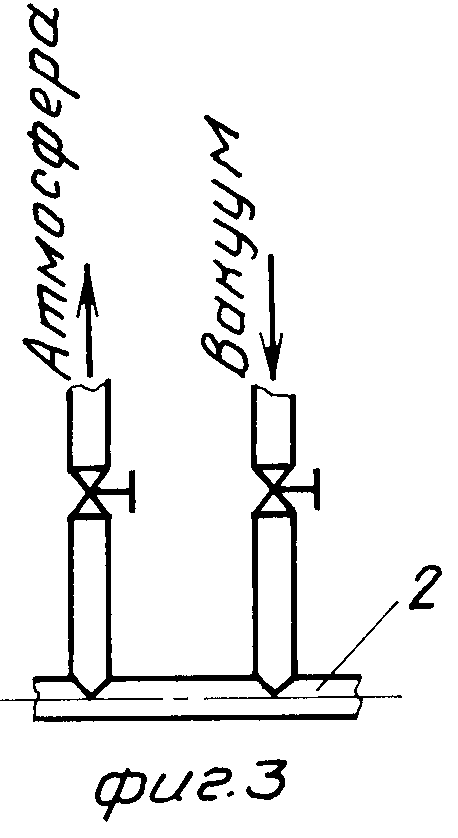
На фиг.1 показано захватное устройство; на фиг.2 фронтальный вид на захватные элементы, разрез; на фиг.3 подключение захватных элементов к вакуумирующей системе.
Захватное устройство состоит из корпуса 1, полых эластичных оболочек 2, заполненных сыпучим материалом 3, например песком. Внутренняя полость каждой эластичной оболочки, например, через перфорированные пластины, используемые для удержания сыпучего материала во внутренней полости эластичной оболочки сообщена через шланги с установленными на них вентилями с атмосферой и с вакуумирующей системой. Вдоль каждой оболочки 2 в ее внутренней полости расположены захватные элементы 4, выполненные в виде нерастяжимого элемента, например из сталистой проволоки.
Захватное устройство работает следующим образом.
В исходном положении внутренняя полость эластичных оболочек 2 соединена с атмосферой. При первоначальном контакте полых эластичных оболочек 2 с деталью, например шаром, электролампой и т.д. возникают реактивные силы, которые заставляют их расходиться в сторону и огибать деталь, расходятся в сторону и захватные элементы 4. При дальнейшем приближении к детали захватные элементы стремятся вернуться в исходное положение, чем и обеспечивается захват детали. После этого вентиль, соединяющий внутреннюю полость эластичных оболочек 2 с атмосферой, закрывают. Затем внутреннюю полость эластичных оболочек 2 соединяют с вакуумирующей системой.
Под действием разности давлений, образующихся внутри эластичных оболочек и снаружи, частицы сыпучего материала 3 прижимаются одна к другой и приобретают пространственную жесткость, после этого производят перенос деталей. После переноса детали на требуемую позицию внутреннюю полость оболочек 2 отсоединяют от вакуумирующей системы и соединяют с атмосферой. При подъеме корпуса деталь самопроизвольно или принудительно освобождается из захватных элементов 4. Самопроизвольность освобождения определяется весом детали, а также жесткостью захватных элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРУБА | 1992 |
|
RU2014540C1 |
| УСТРОЙСТВО В.Г.ВОХМЯНИНА ДЛЯ ЗАДЕЛКИ ПРОБОИНЫ В КОРПУСЕ СУДНА | 1990 |
|
RU2005642C1 |
| ЛОДКА В.Г.ВОХМЯНИНА | 1992 |
|
RU2029705C1 |
| ЦВЕТОЧНЫЙ ГОРШОК В.Г.ВОХМЯНИНА | 1992 |
|
RU2011335C1 |
| УСТРОЙСТВО ДЛЯ ДИСПЕРГИРОВАНИЯ | 1992 |
|
RU2048880C1 |
| РАЗДАТОЧНЫЙ КРАН | 1992 |
|
RU2008251C1 |
| СПОСОБ В.Г.ВОХМЯНИНА СБОРКИ ГИБКОГО ШЛАНГА | 1993 |
|
RU2042519C1 |
| ИГРА-ГОЛОВОЛОМКА | 1992 |
|
RU2009672C1 |
| МАХОВИК ВОХМЯНИНА ПЕРЕМЕННОГО МОМЕНТА ИНЕРЦИИ | 1991 |
|
RU2023913C1 |
| ИГРА-ГОЛОВОЛОМКА | 1992 |
|
RU2019236C1 |
Изобретение относится к робототехнике и может быть использовано в машиностроении и других отраслях для захвата деталей с выпуклыми поверхностями. Цель изобретения - расширение функциональных возможностей за счет изменения жесткости захвата в процессе выполнения технологических операций. Захватное устройство состоит из корпуса 1 и упругих захватных элементов 2, выполненных в виде гермитичного полого шланга из эластичного материала, своими концами закрепленного на корпусе и заполненного сыпучим материалом 3. Для придания жесткости захватам внутреннюю полость шлангов соединяют с вакуумным насосом. 1 з.п. ф-лы, 3 ил.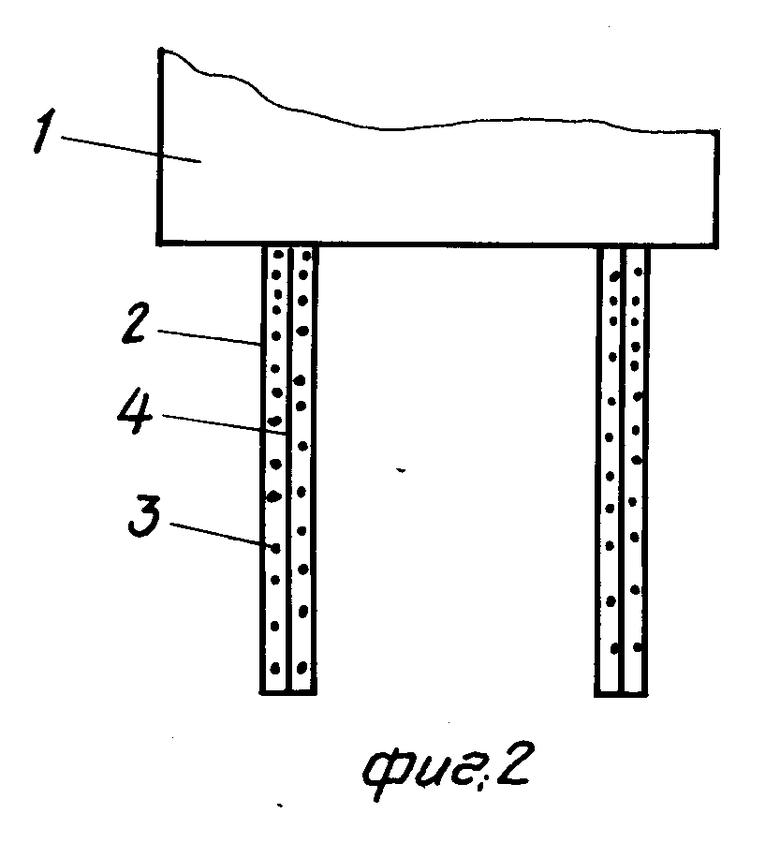
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Захватное устройство | 1988 |
|
SU1611731A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
