Изобретение относится к технике измерения температур подвижных и неподвижных сред термопреобразователями сопротивления, в том числе и полупроводниковыми.
Известен способ компенсации температурной погрешности термометров сопротивления, заключающийся в ограничении величины измерительного тока. Снижение температурной погрешности в известном способе достигается за счет того, что подводимую к термометру сопротивления электрическую мощность поддерживают постоянной независимо от изменения его сопротивления в диапазоне измеряемых температур [1]
К недостаткам способа измерения температур следует отнести образование погрешностей измерения, вызываемых изменением условий теплообмена между термометром сопротивления и измеряемой средой при изменении расхода, так как коэффициент теплообмена существенно зависит от скорости потока измеряемой среды.
Наиболее близким по технической сущности является способ измерения температуры термометром сопротивления, заключающийся в регулировании (управлении) подводимой к нему мощности. Использование термометра в широком диапазоне температур при обеспечении заданной точности достигается тем, что поддерживают неизменной разность температур между термометром сопротивления и окружающей средой [2]
К недостаткам способа следует отнести влияние свойств термометрического вещества (разброс статических характеристик, отклонение от линейности, нестабильность и т.д.) на измерение температуры. Источником существенной погрешности измерения температуры является также отток тепла по корпусу термометра сопротивления, вызванный разностью температур между температурой непосредственно термометра сопротивления Rθ и температурой измеряемой среды θср. К существенным недостаткам способа также следует отнести составляющую погрешности измерения температуры, вызванную изменением расхода G измеряемой среды, что нарушает установившийся режим теплообмена.
Действительно, согласно известному способу измерения температуры θср измеряемой среды, она определяется по мощности Pθ, подводимой к термометру сопротивления Rθ, таким образом, чтобы разность θ-θср в широком диапазоне температур θср и расходов G измеряемой среды оставалась постоянной. Однако реализуемое при этом выражение Рθ=КтхФ=(θ-θср) справедливо при постоянстве Ф площади поверхности термометра сопротивления и постоянстве Кт коэффициента конвективной теплопередачи (теплоотдачи). Как известно [3] коэффициент конвективной теплопередачи для воды (Кт)вд при температуре 20оС в трубопроводе диаметром 300 мм изменяется от 370 до 7500 Вт/(м2 К) при изменении скорости потока воды от 0,1 до 4 м/с.
Аналогично коэффициент теплопередачи для воздуха (Кт)вз изменяется при температуре 20оС, в трубопроводе диаметром 400 мм от 4,3 до 93 Вт/(м2 К) при изменении скорости потока воздуха от 1 до 50 м/с. Следовательно, область применения известного способа измерения температур термометрами сопротивления ограничена возможностью измерения температур неподвижных сред.
Цель изобретения повышение точности измерения и обеспечение возможности измерения температуры движущегося потока измеряемой среды при переменных массовых расходах.
Для достижения цели в способе измерения температуры, при котором в измеряемую среду устанавливают термометр сопротивления и изменяют подводимую к нему электрическую мощность для управления температурой термометра сопротивления, в непосредственной близости от термометра сопротивления в измеряемую среду устанавливают дополнительный идентичный термометр сопротивления и изменяют подводимую электрическую мощность для управления его температурой, подводимыми электрическими мощностями стабилизируют температуры каждого термометра сопротивления на разных уровнях θ1иθ2 соответственно, измеряют подводимые к каждому термометру сопротивления электрические мощности соответственно Р1 и Р2, а величину температуры θср измеряемой среды вычисляют из соотношения:
θср=  (1)
(1)
Исследование известных в науке и технике решений показало, что известен метод двух теплоприемников (термометров сопротивления) [4]
Однако, в отличие от известных методов двух теплоприемников, согласно которым измеряют температуру теплоприемника по зависимости его сопротивления от температуры, в предложенном техническом решении исключается влияние метрологических свойств термометрического вещества, а температура среды определяется при фиксированных температурах термометров сопротивления по отношению подводимых электрических мощностей. Т.е. температуру не измеряют, а стабилизируют и измеряют мощность, подводимую к термометрам сопротивления для их самонагрева до заданного значения температуры.
Положительный эффект связан с повышением точности измерения за счет снижения разности температур между измеряемой средой и термометром сопротивления, за счет снижения оттока тепла вдоль теплоприемника.
Другим важным свойством, связанным с достигаемым положительным эффектом, является независимость результатов измерения от свойств метрологических характеристик термометрического вещества. Традиционно температуру θср определяют по изменению сопротивления Rθ термометра сопротивления
Rθ= R (1+Kc(θ-θo), (2) где R
(1+Kc(θ-θo), (2) где R сопротивление термометра сопротивления при температуре θo;
сопротивление термометра сопротивления при температуре θo;
Кс температурный коэффициент сопротивления.
В этом случае нелинейность, нестабильность и разброс номинальной метрологической характеристики термометра сопротивления преобразуются непосредственно в погрешность измерения.
В предложенном техническом решении измеряются электрические мощности Р1 и Р2, подводимые к термометрам сопротивления. Они связаны с температурой среды θср и собственными температурами термометров сопротивления следующими зависимостями:
Р1=КтхФх(θ1-θср);(3)
Р2=КтхФх(θ2-θср)(4)
Зависимости (3) и (4), используемые в настоящем техническом решении, основаны на функциональной связи между количеством тепла, выделяемым измерительным током (ток самонагрева) при подведении электрической мощности к термометрам сопротивления и их температурами, θ1иθ2 соответственно.
Наиболее важным положительным эффектом, связанным с реализацией настоящего технического решения, является то, что способ измерения температуры осуществляет абсолютную температурную термодинамическую шкалу (АТТШ) в градусах Кельвина.
Действительно, основное уравнение (1), реализуемое в способе, получено путем деления выражения (3) на выражение (4). В результате такого деления сокращаются Кт (коэффициент конвективной теплопередачи) и Ф (площадь поверхности термометра сопротивления). Полученное таким образом исходное уравнение
 (5) является уравнением АТТШ, которое не зависит от свойств термометрического вещества, а также не зависит от свойств измеряемой среды (сокращается Кт) и от конструктивных параметров термометра сопротивления (сокращается Ф). Поскольку параметр Кт функционально связан со скоростью потока, то его сокращение исключает влияние изменения расхода измеряемой среды на показания прибора (результат измерения температуры). Поскольку оба термометра сопротивления идентичные и расположены в непосредственной близости, в одинаковых условиях, можно ожидать одинаковую адгезию, что при сокращении Ф исключает влияние налипания частиц измеряемого вещества на показания прибора.
(5) является уравнением АТТШ, которое не зависит от свойств термометрического вещества, а также не зависит от свойств измеряемой среды (сокращается Кт) и от конструктивных параметров термометра сопротивления (сокращается Ф). Поскольку параметр Кт функционально связан со скоростью потока, то его сокращение исключает влияние изменения расхода измеряемой среды на показания прибора (результат измерения температуры). Поскольку оба термометра сопротивления идентичные и расположены в непосредственной близости, в одинаковых условиях, можно ожидать одинаковую адгезию, что при сокращении Ф исключает влияние налипания частиц измеряемого вещества на показания прибора.
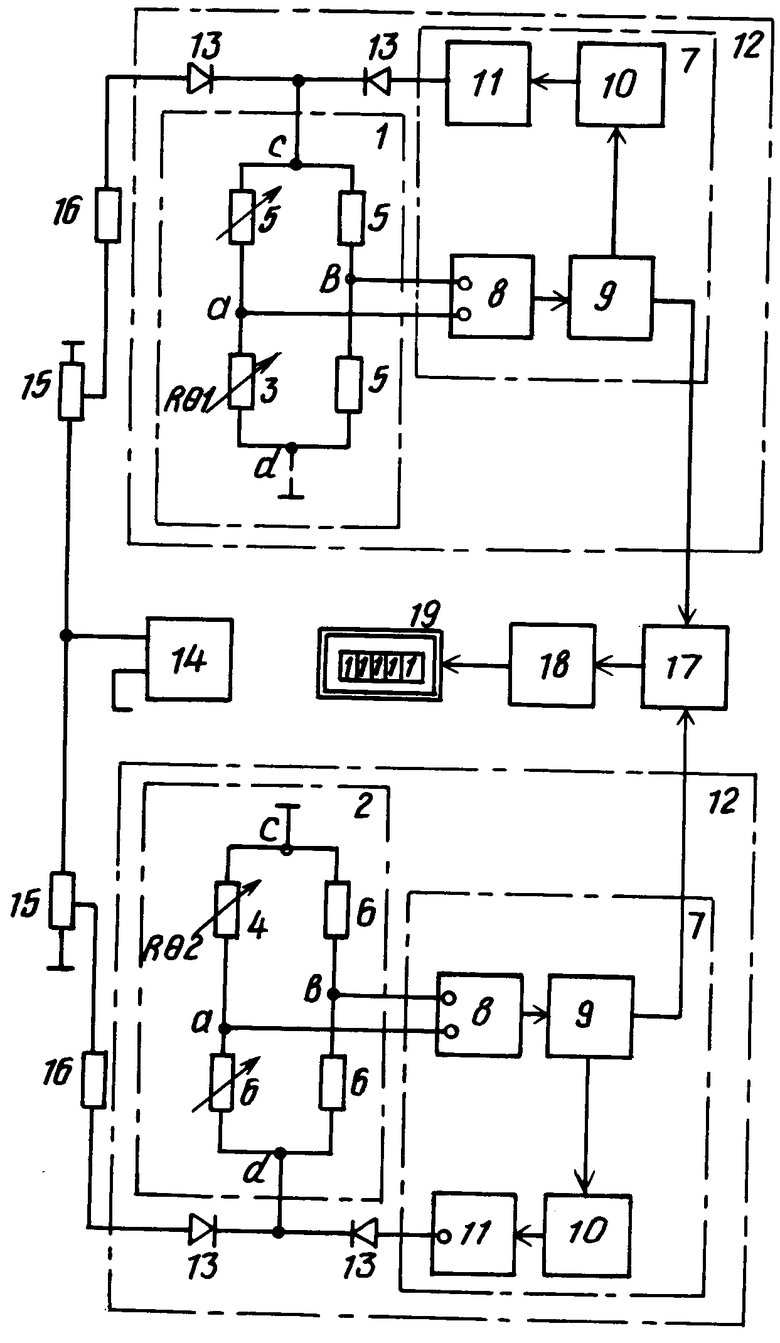
На чертеже представлена схема устройства, реализующего способ.
Устройство содержит два резисторных моста 1 и 2, в рабочие плечи 3 и 4 которых включены термометры R иR
иR сопротивления. В плечи 5 и 6 сравнения резисторных мостов 1 и 2 включены термонезависимые резисторы R1 и R2, величины которых найдены в соответствии с номинальной статической характеристикой (НСХ) и выбраны равными соответственно сопротивлениям R
сопротивления. В плечи 5 и 6 сравнения резисторных мостов 1 и 2 включены термонезависимые резисторы R1 и R2, величины которых найдены в соответствии с номинальной статической характеристикой (НСХ) и выбраны равными соответственно сопротивлениям R иR
иR термометров сопротивления в установившемся режиме при заданных температурах стабилизации θ1иθ2. Резисторные мосты 1 и 2 содержат цепи 7 обратной связи, имеющие последовательно включенные усилитель 8 разбаланса резисторных мостов, генератор 9 управляемой частоты, формирователь 10 биполярных импульсов тока и аттенюатор 11 импульсного сигнала. Таким образом, резисторные мосты 1 и 2 охвачены контуром обратной связи, содержащим замкнутую цепь 7 обратной связи, образованную подключением входов усилителей 8 к измерительным диагоналям а-b и выходов аттенюаторов 11 к диагоналям питания резисторных мостов 1 и 2 соответственно. Резисторные мосты 1 и 2 совместно с цепью 7 обратной связи образуют системы 12 стабилизации температур θ1иθ2 термометров сопротивления R
термометров сопротивления в установившемся режиме при заданных температурах стабилизации θ1иθ2. Резисторные мосты 1 и 2 содержат цепи 7 обратной связи, имеющие последовательно включенные усилитель 8 разбаланса резисторных мостов, генератор 9 управляемой частоты, формирователь 10 биполярных импульсов тока и аттенюатор 11 импульсного сигнала. Таким образом, резисторные мосты 1 и 2 охвачены контуром обратной связи, содержащим замкнутую цепь 7 обратной связи, образованную подключением входов усилителей 8 к измерительным диагоналям а-b и выходов аттенюаторов 11 к диагоналям питания резисторных мостов 1 и 2 соответственно. Резисторные мосты 1 и 2 совместно с цепью 7 обратной связи образуют системы 12 стабилизации температур θ1иθ2 термометров сопротивления R иR
иR , каждый из которых одновременно является и нагревателем и датчиком температуры. Для гальванической развязки устройство оснащено диодами 13. Питание резисторных мостов может быть как автономным, только по контуру обратной связи, так и совмещенным, при котором к диагоналям питания c-d присоединены параллельно цепь 7 обратной связи и общий (на оба резисторных моста) источник 14 питания установочного напряжения, подключенный посредством переменного резистора 15 и ограничительного резистора 16. Под установочным напряжением в схеме понимается напряжение, необходимое для приведения резисторных мостов в равновесие при нулевых начальных условиях, при нулевом расходе и максимальной температуре измеряемой среды. Генератор 9 импульсов выдает сигналы, пропорциональные величине электрической мощности, подводимой к термометрам R
, каждый из которых одновременно является и нагревателем и датчиком температуры. Для гальванической развязки устройство оснащено диодами 13. Питание резисторных мостов может быть как автономным, только по контуру обратной связи, так и совмещенным, при котором к диагоналям питания c-d присоединены параллельно цепь 7 обратной связи и общий (на оба резисторных моста) источник 14 питания установочного напряжения, подключенный посредством переменного резистора 15 и ограничительного резистора 16. Под установочным напряжением в схеме понимается напряжение, необходимое для приведения резисторных мостов в равновесие при нулевых начальных условиях, при нулевом расходе и максимальной температуре измеряемой среды. Генератор 9 импульсов выдает сигналы, пропорциональные величине электрической мощности, подводимой к термометрам R иR
иR соответственно. Генератор 9 имеет две пары параллельно соединенных выходов, к одной из которых подключен формирователь 10 биполярных импульсов, а к другой функциональный блок 17 отношения. Выход функционального блока 17 отношений пропорционален отношению Р1/Р2 электрических мощностей, подведенных к термометрам R
соответственно. Генератор 9 имеет две пары параллельно соединенных выходов, к одной из которых подключен формирователь 10 биполярных импульсов, а к другой функциональный блок 17 отношения. Выход функционального блока 17 отношений пропорционален отношению Р1/Р2 электрических мощностей, подведенных к термометрам R иR
иR соответственно, и подключен к вычислительному блоку 18, в котором реализован алгоритм вычисления по формуле (1). Выход вычислительного блока 18 соединен с показывающим прибором 19.
соответственно, и подключен к вычислительному блоку 18, в котором реализован алгоритм вычисления по формуле (1). Выход вычислительного блока 18 соединен с показывающим прибором 19.
Устройство для измерения температуры работает следующим образом.
Система 12 стабилизации температуры поддерживает постоянство температуры θ1 термометра R , включенного в рабочее плечо 3 резисторного моста 1. Резисторный мост 2 также со своей системой 12 стабилизации поддерживает постоянство температуры θ2 термометрa R
, включенного в рабочее плечо 3 резисторного моста 1. Резисторный мост 2 также со своей системой 12 стабилизации поддерживает постоянство температуры θ2 термометрa R , включенного в рабочее плечо 4. Стабилизация обеспечивается в широком диапазоне внешних возмущающих факторов, в том числе при изменении расхода G и температуры θср измеряемой среды.
, включенного в рабочее плечо 4. Стабилизация обеспечивается в широком диапазоне внешних возмущающих факторов, в том числе при изменении расхода G и температуры θср измеряемой среды.
Устройство может работать как с источником 14 установочного напряжения, так и без него, в режиме автономного питания. Режим совмещенного питания обладает преимуществами по прочности, поскольку в этом режиме система 12 стабилизации работает в режиме компенсации малых отклонений относительного заданного значения.
На приведенном чертеже рассмотрен режим совмещенного питания, при котором в диагонали питания c-d параллельно включены цепь 7 обратной связи и общий источник 14 установочного напряжения через регулировочные резисторы 15 и ограничительные резисторы 16. Перед началом эксплуатации предусматривается предварительная настройка, в процессе которой резисторные мосты 1 и 2 приводятся в равновесие с помощью резисторов 15 за счет источника 14 питания при отключенной цепи 7 обратной связи, при нулевом расходе измеряемой среды. При достижении установившегося режима напряжение на выходе усилителя 8 в цепи 7 обратной связи устанавливается равным нулю, после чего цепь 7 обратной связи может быть подключена к диагонали c-d для нормального функционирования резисторных мостов соответственно 1 и 2. Дальнейшая балансировка резисторных мостов 1 и 2 осуществляется автоматически электрическими сигналами в цепи 7 обратной связи.
Термометры R иR
иR выбраны одинаковыми и установлены на одном участке трубопровода с одинаковыми температурными и гидродинамическими характеристиками измеряемой среды.
выбраны одинаковыми и установлены на одном участке трубопровода с одинаковыми температурными и гидродинамическими характеристиками измеряемой среды.
При изменении температуры θср измеряемой среды изменяются условия теплообмена между измеряемой средой и термометрами сопротивления R иR
иR в рабочих плечах 3 и 4 резисторных мостов 1 и 2. Изменение сопротивлений рабочих плеч 3 и 4 приводит к нарушению равновесия резисторных мостов 1 и 2, которое компенсируется приращениями подводимых электрических мощностей Р1 и Р2 за счет изменения сигналов управления в цепи обратной связи 7 систем 12 стабилизации температур θ1иθ2термометров сопротивлений R
в рабочих плечах 3 и 4 резисторных мостов 1 и 2. Изменение сопротивлений рабочих плеч 3 и 4 приводит к нарушению равновесия резисторных мостов 1 и 2, которое компенсируется приращениями подводимых электрических мощностей Р1 и Р2 за счет изменения сигналов управления в цепи обратной связи 7 систем 12 стабилизации температур θ1иθ2термометров сопротивлений R ,R
,R .
.
Способ измерения температуры основан на том, что между величиной электрической мощности, подведенной к термометру сопротивления, и сигналами управления в цепи 7 обратной связи существует вполне определенная зависимость, которая как в непрерывных, так и в импульсных системах может быть представлена следующим выражением:
P  F (6) где Е в аналоговом (непрерывном) режиме работы уровень сигнала напряжения в цепи обратной связи, в дискретном (импульсном) режиме работы амплитуда импульса;
F (6) где Е в аналоговом (непрерывном) режиме работы уровень сигнала напряжения в цепи обратной связи, в дискретном (импульсном) режиме работы амплитуда импульса;
Т, Ти период подачи импульсов, частота подачи импульсов соответственно;
F 1/T частота подачи питающих импульсов.
Из приведенного выражения (6) следует, что управление в цепи 7 обратной связи может быть осуществлено следующими тремя методами.
Аналоговый режим управления.
Если в выражении (6) принять Т Ти (длительность питающего импульса и период подачи импульсов равны между собой), а под величиной Е понимать уровень сигнала напряжения в цепи 7 обратной связи, то выражение (6) приводится к виду:
P= E2/Rθ (7) Т.е. уравнение (6) является общим видом выражения, связывающего электрическую мощность, подводимую к термометру сопротивления, с его сопротивлением Rθ
Частотный режим управления.
В этом режиме поддерживают постоянство амплитуды Е и длительность питающего импульса Ти. Стабилизация θиRθ достигается за счет изменения частоты F подачи импульсов в цепи 7 обратной связи. В этом случае реализуется выражение
P=K F, (8) где постоянная величина
F, (8) где постоянная величина
K =E2T/Rθ.(9)
=E2T/Rθ.(9)
Широтно-импульсный режим управления.
В этом режиме поддерживают постоянный уровень сигнала Е (амплитуда питающего импульса) и сигнала (частота питающего импульса). Стабилизация температур θ1иθ2 и сопротивлений R иR
иR достигается за счет изменения длительности питающего импульса Ти. В системе 12 стабилизации реализуется выражение
достигается за счет изменения длительности питающего импульса Ти. В системе 12 стабилизации реализуется выражение
P=K Ти,(10) где K
Ти,(10) где K =E2˙F/Rθ(11)
=E2˙F/Rθ(11)
Любой из рассмотренных методов реализации обратной связи может быть использован для реализации устройства по предложенному способу измерения температуры. В приведенном примере технической реализации рассмотрен частотный вариант, согласно которому приращение температуры δθсризмеряемой среды вызывает пропорциональное приращение δP подводящей электрической мощности и соответствующее приращение частоты в цепи 7 обратной связи.
Устройство в этом случае работает следующим образом. Изменение температуры θср приводит к разбалансу резисторных мостов 1 и 2. В обеих системах 12 стабилизации усиленный сигнал разбаланса через усилитель 8 подводится к входу генератора 9 управляемой частоты F. Напряжение разбаланса резисторного моста (соответственно 1 и 2) увеличивает частоту F генератора 9 на величину δF до значения, при котором под воздействием прямоугольных импульсов, поступающих на резисторный мост с формирователя 10 биполярных импульсов через аттенюатор 11, наступает равновесное состояние резисторного моста. Таким образом, сигнал разбаланса резисторного моста (соответственно 1 и 2) приводит к изменению δF частоты генератора 9, а, следовательно, к изменению δ P мощности, подводимой к термометру R θ сопротивления, что вызывает его разогрев до заданной температуры θ1иθ2 соответственно. Таким образом резисторные мосты 1 и 2 при изменении измеряемой температуры θср приходят в новое сбалансированное состояние при новых значениях питающей частоты и при новых значениях электрической мощности P θ, подводимой к термометрам сопротивления Ro(R  иR
иR  )соответственно). Чтобы обеспечить согласование обоих резисторных мостов в рабочем режиме и взаимозаменяемость, необходимую при разбросе номинальных статических характеристик (особенно в случае использования полупроводниковых и тонкопленочных термометров сопротивления), между формирователем 10 биполярных импульсов и диагоналями c-d питания резисторных мостов 1 и 2 устанавливают аттенюаторы 11, которые используют для регулировки амплитуды импульсов питания. Для исключения аддитивной составляющей погрешности в цепях c-d мостов 1 и 2 в цепь 7 обратной связи вводят формирователь 10 биполярных импульсов. Генератор 9 управляемой частоты имеет два параллельно соединенных выхода. Один из них используется в цепи 7 обратной связи и соединен с входом формирователя 10. Кроме того, учитывая выражение (8), согласно которому частота F на выходе генератора 9 пропорциональна электрической мощности Р, подводимой к термометру сопротивления, генератор 9 используется как измерительный преобразователь мощности термометра сопротивления, в связи с чем вторые выходы генераторов 9 подключены к входам функционального блока 17 отношений, выходной сигнал которого пропорционален отношению Р1/Р2электрических мощностей, подводимых к термометрам сопротивления R
)соответственно). Чтобы обеспечить согласование обоих резисторных мостов в рабочем режиме и взаимозаменяемость, необходимую при разбросе номинальных статических характеристик (особенно в случае использования полупроводниковых и тонкопленочных термометров сопротивления), между формирователем 10 биполярных импульсов и диагоналями c-d питания резисторных мостов 1 и 2 устанавливают аттенюаторы 11, которые используют для регулировки амплитуды импульсов питания. Для исключения аддитивной составляющей погрешности в цепях c-d мостов 1 и 2 в цепь 7 обратной связи вводят формирователь 10 биполярных импульсов. Генератор 9 управляемой частоты имеет два параллельно соединенных выхода. Один из них используется в цепи 7 обратной связи и соединен с входом формирователя 10. Кроме того, учитывая выражение (8), согласно которому частота F на выходе генератора 9 пропорциональна электрической мощности Р, подводимой к термометру сопротивления, генератор 9 используется как измерительный преобразователь мощности термометра сопротивления, в связи с чем вторые выходы генераторов 9 подключены к входам функционального блока 17 отношений, выходной сигнал которого пропорционален отношению Р1/Р2электрических мощностей, подводимых к термометрам сопротивления R  иR
иR  . Выходы блока 17 отношений подключены к входам вычислительного блока 18, в котором согласно выражению (1) рассчитывается измеряемая температура θср среды, которая отображается показывающим прибором 19.
. Выходы блока 17 отношений подключены к входам вычислительного блока 18, в котором согласно выражению (1) рассчитывается измеряемая температура θср среды, которая отображается показывающим прибором 19.
Настоящим способом исключено влияние коэффициента Кт конвективной теплоотдачи, Ф площади эффективной поверхности термометра сопротивления, тем самым исключаются влияние изменения расхода и адгезия теплоприемника на показания прибора.
При осуществлении способа реализуется абсолютная температурная термодинамическая шкала (АТТШ), которая не связана с метрологическими свойствами термометрического вещества. Таким образом, способ позволяет выполнять измерение температуры с использованием высокочувствительных полупроводниковых и тонкопленочных датчиков, которые отличаются низкими метрологическими характеристиками.
Достоинством способа является также его высокое быстродействие за счет охвата термометра сопротивления глубокой отрицательной обратной связью.
Устройство для реализации способа может быть изготовлено полностью из типовых блоков комплексов "КАСКАД" или АКЗСР.
При реализации устройства и способа на базе комплекса "Каскад" в качестве блока стабилизации можно использовать прибор регулирующий типа Р25, а вычислительные операции могут быть реализованы с использованием функциональных блоков А04, А31, А33. Все указанные блоки имеют нормированный выходной сигнал, который может быть использован для дистанционного ввода в ЭВМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАССОВЫЙ РАСХОДОМЕР | 1991 |
|
RU2018090C1 |
| УСТРОЙСТВО ЗИНГЕРА А.М. ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 1991 |
|
RU2034248C1 |
| Тепловой расходомер | 1984 |
|
SU1190197A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЛАЖНОСТИ МАТЕРИАЛОВ | 1991 |
|
RU2008660C1 |
| Способ измерения температуры электрическими термометрами сопротивления | 1974 |
|
SU499507A1 |
| Способ измерения вязкости потока в трубопроводе | 1989 |
|
SU1702249A1 |
| Способ компенсации температурной погрешности термометров сопротивления | 1972 |
|
SU463006A1 |
| Устройство для измерения высоких температур | 1988 |
|
SU1673873A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ ТВЕРДЫХ ТЕЛ | 1991 |
|
RU2008649C1 |
| Способ измерения концентрации газа термокаталитическим датчиком | 2019 |
|
RU2716877C1 |
Использование: измерение температур подвижных и неподвижных сред термопреобразователями сопротивления, в том числе и полупроводниковыми. Сущность изобретения: в измеряемую среду устанавливают два идентичных термометра сопротивления и изменяют величину подводимой к ним электрической мощности для управления их температурой. Подводимыми электрическими мощностями стабилизируют температуру каждого термометра сопротивления на разных уровнях. Измеряют подводимые к каждому термометру сопротивления электрические мощности, а величину температуры измеряемой среды вычисляют из соотношения, приведенного в описании. 1 ил.
Способ измерения температуры, при котором в измеряемую среду устанавливают термометр сопротивления и изменяют подводимую к нему электрическую мощность для управления температурой термометра сопротивления, отличающийся тем, что в непосредственной близости от термометра сопротивления в измеряемую среду устанавливают дополнительный идентичный термометр сопротивления и изменяют подводимую электрическую мошность для управления его температурой, подводимыми электрическими мощностями стабилизируют температуры каждого термометра сопротивления на разных уровнях θ1 и θ2 соответственно, измеряют подводимые к каждому термометру сопротивления электрические мощности соответственно P1 и P2, а величину температуры θcp измеряемой среды вычисляют из соотношения
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Ярышев Н.А | |||
| Теоретические основы измерения нестационарной температуры | |||
| Л.: Энергоатомиздат, 1990. | |||
