Изобретение относится к телеметрическим системам идентификации объектов и может быть использовано для идентификации контейнеров, железнодорожного и автомобильного транспорта.
Известна система запроса и обнаружения, которая содержит считывающее устройство, ответчик и идентифицируемый объект. В считывающее устройство входят генератор немодулированных колебаний, приемопередающая антенна, линия передачи, к входу которой подключен генератор, а к ее выходу антенна, два направленных ответвителя, включенных в линию передачи навстречу друг другу, смеситель, фильтр нижних частот и демодулятор, включенные последовательно.
Также известна система для идентификации конкретных объектов, которая содержит считывающий блок и ответчик, которым оснащен идентифицируемый объект. Считывающее устройство включает в себя генератор немодулированных колебаний, приемопередающую антенну, линию передачи, два направленных ответвителя, смеситель, усилитель низкой частоты и демодулятор. Направленные ответвители включены в линию передачи навстречу друг другу, а их выходы подключены к входам смесителя, к которому последовательно подключены усилитель и демодулятор. К входу линии передачи подключен генератор, а к ее выходу антенна. Датчик содержит приемопередающую антенну, модулятор и постоянное запоминающее устройство (ПЗУ), включенные последовательно.
Считывающий блок запрашивает объект, оснащенный датчиком, который выдает идентифицирующую последовательность "единиц" и "нулей" в двоичном коде индивидуально для конкретного объекта. Этим кодом модулируется отражение от антенны датчика.
В считывающее устройство поступает сумма двух сигналов. Один сигнал промодулирован кодом объекта, а другой, существенно больше первого, отражен от пассивных частей датчика и корпуса объекта и не несет информации о конкретном объекте. В известных устройствах эти сигналы суммируются со случайном фазой, от которой зависит глубина модуляции суммарного сигнала. Вероятность того, что глубина модуляции будет максимальна, мала, так как этот параметр не контролируется, а от него зависит максимальный радиус действия системы.
Целью изобретения является увеличение радиуса действия системы за счет создания условий для максимально возможной глубины модуляции суммарного сигнала путем размещения датчика на корпусе объекта на расстоянии, равном нулю или кратном четверти рабочей длины волны системы между центрами отражений, промодулированных информацией об идентифицируемом объекте, и фазовым центром отражений от частей датчика и объекта, не содержащих такой информации.
Это достигается благодаря тому, что телеметрическая система идентификации объектов содержит считывающий блок с приемопередающей антенной, датчик с приемопередающей антенной, удаленный от считывающего устройства, и идентифицируемый объект, причем датчик установлен на объекте на расстоянии, отсчитанном вдоль линии визирования объекта, когда электрические оси антенн считывающего устройства и датчика совпадают или находятся под углом менее 20о и на расстоянии, равном нулю или кратном четверти рабочей длины волны системы между фазовыми центрами отраженных сигналов, промодулированных информацией об идентифицируемом объекте, и фазовым центром отраженных сигналов от частей датчика и объекта, не содержащих такой информации.
Отличительным признаком изобретения является расстояние между фазовыми центрами отражений, несущими и не несущими информацию об объекте, которое равно n λ/4 (n=2,1,2,3,), где λ рабочая длина волны системы.
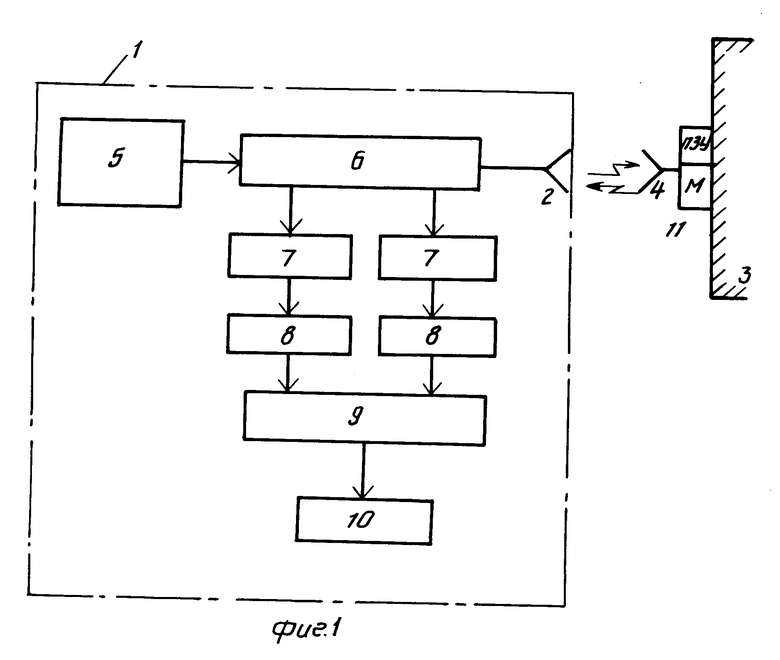
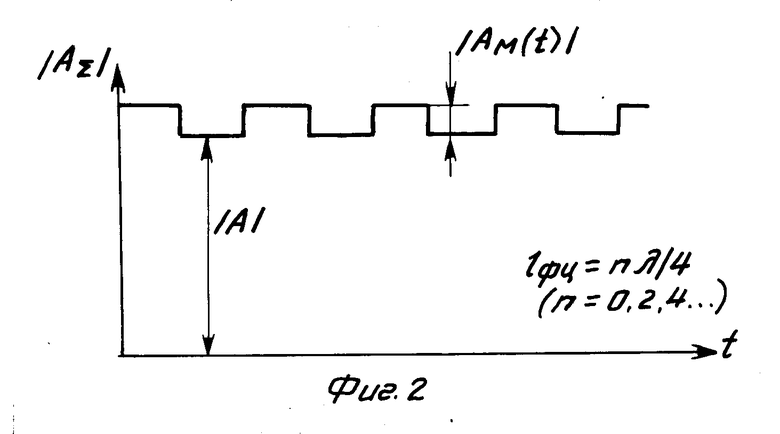
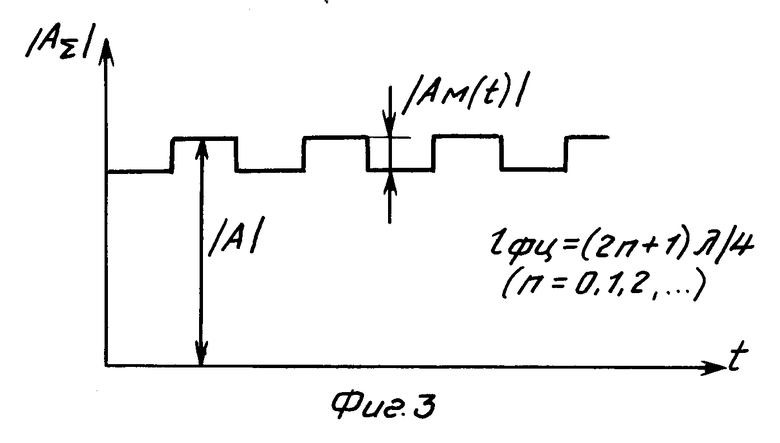
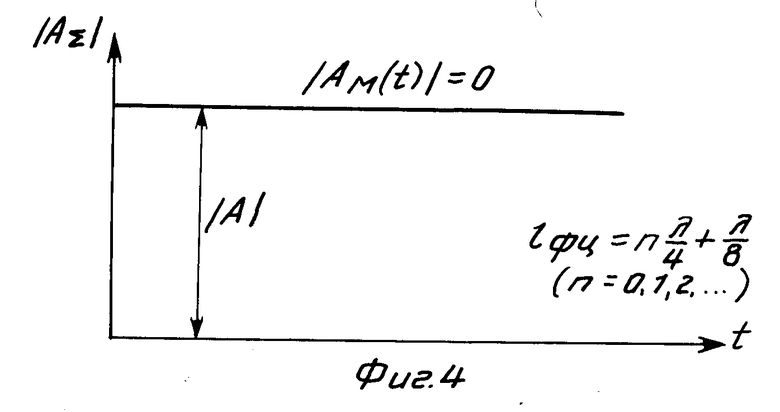
На фиг. 1 приведена структурная схема системы; на фиг. 2 зависимость амплитуды ( l AΣ l ) суммарного сигнала во времени при расстоянии между фазовыми центрами отражений, несущих и не несущих информацию об объекте, равном lфц= nλ/4 (n=0,2,4,6,); на фиг. 3 зависимость амплитуды (l AΣl ) суммарного сигнала во времени при расстоянии между фазовыми центрами отражений, несущих и не несущих информацию об объекте, равном lфц(2n+ 1) ˙ λ/4 (n=0,1,2,3,); на фиг. 4 зависимость амплитуды (l AΣ l ) суммарного сигнала во времени при расстоянии между фазовыми центрами отражений, несущих и не несущих информацию об объекте, равном lфцn λ/4+ λ /8 (n=0,1,2,3,).
Система содержит считывающий блок 1, приемопередающую антенну 2, датчик сигналов 3, приемопередающую антенну 4.
Считывающий блок 1 может быть собран по схеме, которая включает генератор 5 немодулированного излучения, линию 6 передачи, приемопередающую антенну 2, несколько ответвителей, включенных в линию передачи, соединяющую генератор и антенну, детекторы 7 и ФНЧ 8, подключенные последовательно к выходу ответвителей, усилитель 9 и сумматор сигналов НЧ. На выходе усилителя включен демодулятор.
Предложенная система содержит считывающий блок 1, датчик 3 с антенной 4, удаленный от считывающего блока в дальнюю зону антенны 2, и идентифицируемый объект 11, на котором установлен датчик 3 так, что фазовые центры отражений от датчика и корпуса объекта, несущие и не несущие информацию об объекте, находятся на расстоянии друг от друга n λ/4, где n=0,1,2,3, Расстояние отсчитывается вдоль линии визирования на объект, когда электрические оси антенн совмещены или находятся под углом меньше 20о.
Система работает следующим образом.
Считывающий блок 1 излучает радиоволны, как правило, СВЧ-диапазона в направлении датчика 3 и объекта. Антенна датчика 3 принимает радиоволны и частично отражает их без изменения спектра. Другая часть энергии радиоволн проходит на выход антенны, импеданс которого модулируется, поэтому радиоволны, отраженные от выхода антенны, несут информацию об идентифицируемом объекте. Эти сигналы и сигналы, не несущие информацию об объекте, поступают на вход антенны 2 считывающего блока 1. Сумма этих сигналов равна
AΣА cos( ωt+ θ)+ Am(t)cos(ω t+ θm) или A
A
 A
A
 где А амплитуда сигнала, не несущего информацию об объекте;
где А амплитуда сигнала, не несущего информацию об объекте;
A(t) амплитуда сигнала, несущего информацию об объекте, и потому зависит от времени;
ω круговая частота колебаний генератора 2;
θ -θ m-разность фаз сигналов, несущих и не несущих информацию об объекте.
При условии + 2
+ 2  cos (θ -θm)=0 cуммарный отраженный от датчика и корпуса объекта сигнал не несет информации об объекте. Действительно, учитывая, что |Аm(G)|1<<|A| можно записать
cos (θ -θm)=0 cуммарный отраженный от датчика и корпуса объекта сигнал не несет информации об объекте. Действительно, учитывая, что |Аm(G)|1<<|A| можно записать
cos (θ-θm)  0
0
Это равенство выполняется при условии, что θ-θm=(2n+1) ,n=0,1,2 При двустороннем распространении радиоволн это условие соблюдается, когда расстояние между фазовыми центрами отражений равно
,n=0,1,2 При двустороннем распространении радиоволн это условие соблюдается, когда расстояние между фазовыми центрами отражений равно
n λ/4+ λ /8 (n= 0,1,2,)
Глубина модуляции суммарного сигнала будет максимальна, когда
cos( θ θ m)= ±1, т.е. θ θm= nπ (n= 0,1,2,). Для выполнения этого условия необходимо, чтобы расстояние между фазовыми центрами было равно
n λ/4 (n=0,1,2,).
В этом случае АΣА±Am(t), т.е. суммарный сигнал получает максимальную глубину модуляции, и радиус действия системы становится максимально возможным при прочих равных условиях.
Для достижения этого результата датчик 3 устанавливают на корпусе объекта с возможностью перемещения его вдоль линии визирования со считывающего блока 1. Датчик закрепляют на корпусе объекта в положении максимума сигнала ближайшего к корпусу объекта. Это положение и будет соответствовать расстоянию между фазовыми центрами отражений двух сигналов, при котором глубина модуляции суммарного сигнала будет максимально возможной при прочих равных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 1992 |
|
RU2117961C1 |
| СПОСОБ СЧИТЫВАНИЯ ИНФОРМАЦИИ НА РАССТОЯНИИ С КОДОВОГО ДАТЧИКА | 1993 |
|
RU2068183C1 |
| ПРИЕМООТВЕТЧИК ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМЫ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 1993 |
|
RU2097783C1 |
| УСТРОЙСТВО СЧИТЫВАНИЯ ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМЫ ИДЕНТИФИКАЦИИ (ВАРИАНТЫ) | 1992 |
|
RU2030761C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 1992 |
|
RU2054694C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ОБЪЕКТОВ | 2001 |
|
RU2210789C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2101717C1 |
| АВТОМАТИЧЕСКАЯ СТАНЦИЯ ОТВЕТНЫХ ПОМЕХ | 1994 |
|
RU2103705C1 |
| АВТОМОБИЛЬНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ РАДАРНЫХ УСТАНОВОК КОНТРОЛЯ СКОРОСТИ ДВИЖЕНИЯ НА АВТОТРАССАХ | 1993 |
|
RU2066866C1 |
| ДЕМОДУЛЯТОР КОДОВЫХ СИГНАЛОВ ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМЫ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 1993 |
|
RU2065174C1 |
Использование: для идентификации контейнеров, железнодорожного и автомобильного транспорта. Сущность изобретения: телеметрическая система идентификации объектов содержит считывающий блок, приемопередающие антенны, датчик сигналов, идентифицируемый объект, что позволяет увеличить радиус действия системы за счет создания условий для максимально возможной глубины модуляции суммарного сигнала путем размещения датчика на корпусе объекта на расстоянии, равном нулю или кратном четверти рабочей длины волны системы, между центрами отражений, промодулированных информацией об идентифицируемом объекте, и фазовым центром отражений от частей датчика и объекта, не содержащих такой информации. 4 ил.
ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ, содержащая приемопередающую антенну, соединенную со считывающим блоком, а также датчик сигналов, соединенный со своей приемопередающей антенной, установленный на идентифицируемом объекте, отличающаяся тем, что датчик сигналов установлен на корпусе идентифицируемого объекта вдоль линии визирования, проходящей от считывающего блока к идентифицируемому объекту, таким образом, что электрические оси приемопередающих антенн считывающего блока и датчика сигналов совмещены или находятся под углом менее 20o и на расстоянии, равном нулю или кратном четверти рабочей длины волны между фазовыми центрами отраженных сигналов, промодулированных информационным сигналом идентифицируемого объекта, и фазовым центром отраженных сигналов от частей датчика сигналов и идентифицируемого объекта, не содержащих информационных сигналов об идентифицируемом объекте.
| Патент США N 4739328, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
