Изобретение относится к наземным испытаниям плазменных ускорителей с замкнутым дрейфом электронов и протяженной зоной ускорения (УЗДП) и может быть использовано при определении направления вектора усилия ускорителей, предназначенных для использования в системах коррекции (СК) электрореактивных двигательных установок (ЭРДУ) космических аппаратов (КА), а также в плазменной технологии для определения положения струи относительно обрабатываемой поверхности.
Одним из требований, предъявляемых к исполнительным органам СК (двигателям коррекции), является требование по ограничению угла отклонения вектора усилия относительно заданного направления в определенных пределах. Это требование обусловлено тем, что при наличии отклонений вектора тяги от заданного направления при работе двигателя коррекции неизбежно появление боковых составляющих и, как следствие, паразитных вращающих моментов, воздействующих на КА в целом. Требования к величине углов отклонения вектора усилия довольно жесткие: значения допускаемых отклонений вектора усилия от заданного направления для двигателей не должны превышать одного градуса.
В свою очередь, в плазменной технологии также необходимо знать направление действия струи потока ионов из УЗДП для координации положения обрабатываемых изделий относительно его геометрической оси.
Известно большое количество способов определения усилия ускорителей. Но в основном они позволяют измерять лишь абсолютную величину осевой составляющей вектора усилия ускорителей или просто усилие [1]
Известные способы не позволяют определить направление струи потоков ионов из УЗДП и соответственно отклонение вектора усилия от заданного.
Известен способ определения величины и направления вектора усилия УЗДП, выбранный за прототип, состоящий в установке ускорителя на платформу весового устройства, уравновешивании системы измерения, определении реакций сил при работающем ускорителе, повороте платформы на определенный угол, повторении операций уравновешивания, определении реакций сил при работающем ускорителе и последующем определении величины вектора усилия и угла отклонения вектора усилия по разнице между реакциями сил в двух положениях [2]
Указанный способ имеет ряд недостатков. При проведении испытаний необходимо дополнительные операции по установке и переустановке платформы весового устройства, что требует выполнения операций по уравновешиванию системы измерения. Необходимо выдерживать достаточно жесткие требования на величину погрешности измерения угла поворота платформы, т.е. необходимы специальные прецизионные устройства измерения углов поворота. Измерение требуется проводить по крайней мере два раза, что влечет за собой увеличение времени, потребного для данного вида испытаний. Кроме того, испытания по данному способу не позволяют определять стабильность положения вектора усилия в пространстве при испытаниях ускорителей на подтверждение требуемого ресурса, когда необходимо непрерывное измерение величины усилия ускорителя.
В основу изобретения положена задача уменьшения потребного приборного обеспечения испытаний по определению положения вектора усилия, сокращения времени испытаний, а также создания возможности определения положения вектора усилия в процессе ресурсных испытаний.
Поставленная задача решается тем, что по способу, включающему зажигание разряда в разрядной камере ускорителя при рабочих параметрах и определение угла отклонения вектора усилия относительно оси симметрии разрядной камеры, в процессе испытаний контролируют образование зоны эрозии на наружной стенке канала разрядной камеры вблизи ее выходного среза и определяют участки с наибольшим и наименьшим размерами зоны эрозии, при этом плоскость продольного сечения разрядной камеры, проходящую через границы выбранных участков, принимают за плоскость, в которой расположена боковая составляющая вектора усилия, а по соотношению между геометрическими размерами выбранных участков судят о направлении и величине угла отклонения вектора усилия относительно оси симметрии разрядной камеры.
Направление боковой составляющей вектора усилия определяют по направлению от участка с наибольшим размером зоны эрозии на наружной стенке разрядной камеры в осевом направлении к участку с наименьшим размером зоны эрозии на наружной стенке канала разрядной камеры в осевом направлении.
Величину угла Ао отклонения вектора усилия от оси симметрии разрядной камеры ускорителя определяют по формуле
Ао dL/Dpк, где Ао угол отклонения вектора усилия от оси ускорителя, рад;
dL разница между наибольшей и наименьшей длиной участков эрозии на наружной стенке канала разрядной камеры в осевом направлении, мм;
Dpк диаметр наружной стенки канала разрядной камеры, мм.
Направление боковой составляющей вектора усилия определяют по направлению от участка с наименьшим размером зоны эрозии на наружной стенке канала разрядной камеры в радиальном направлении на срезе канала разрядной камеры к участку с наибольшим размером зоны эрозии в радиальном направлении на срезе канала разрядной камеры.
Положение плоскости продольного сечения разрядной камеры, проходящей через границы выбранных участков, определяют в течение длительности испытаний не менее двух раз и по изменению ее пространственного расположения судят о стабильности направления вектора усилия.
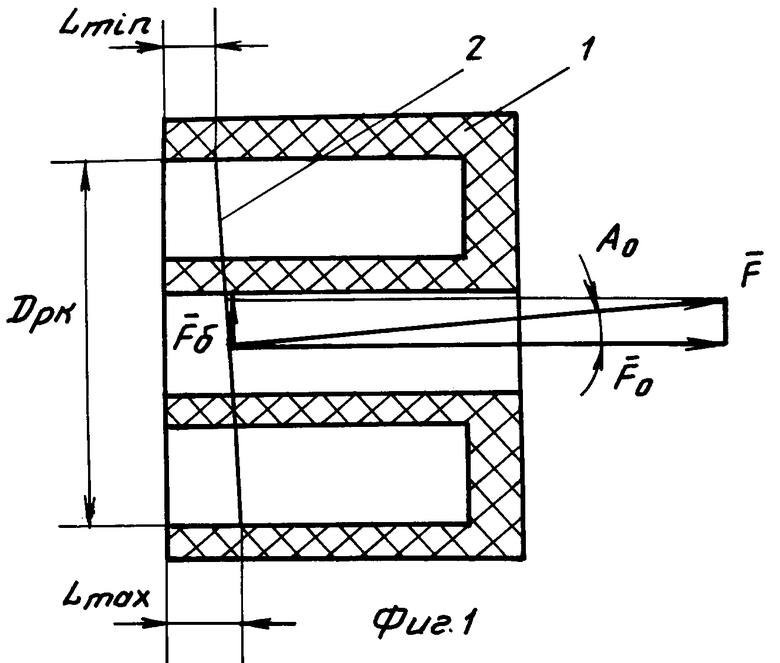
На фиг.1 схематически изображена разрядная камера с зонами эрозии, соответствующими начальному периоду времени работы ускорителя непосредственно после его изготовления, где 1 разрядная камера ускорителя, 2 ускоряющий слой,  вектор усилия ускорителя, Ао угол между осью ускорителя и плоскостью ускоряющего слоя (угол отклонения вектора усилия), Lmin участок наружной стенки разрядной камеры с наименьшими размерами эрозии в осевом направлении, Lmax участок с наибольшими размерами зоны эрозии в осевом направлении, Fб боковая составляющая вектора усилия, Fо осевая составляющая вектора усилия.
вектор усилия ускорителя, Ао угол между осью ускорителя и плоскостью ускоряющего слоя (угол отклонения вектора усилия), Lmin участок наружной стенки разрядной камеры с наименьшими размерами эрозии в осевом направлении, Lmax участок с наибольшими размерами зоны эрозии в осевом направлении, Fб боковая составляющая вектора усилия, Fо осевая составляющая вектора усилия.
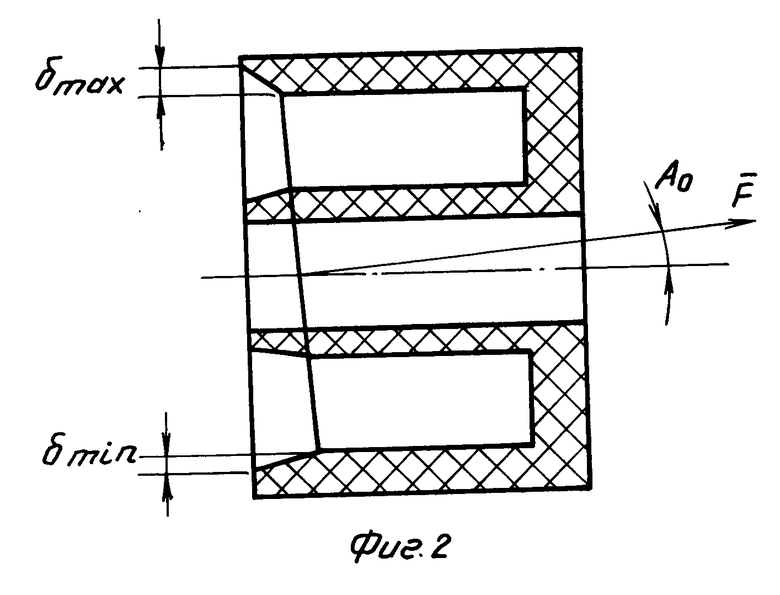
На фиг.2 схематически изображено диаметральное сечение изолятора разрядной камеры, соответствующее плоскости, в которой находится вектор усилия, и полученное при испытаниях по выработке ресурса, где Ао угол отклонения вектора усилия,  вектор усилия, σmin участок изолятора разрядной камеры с наименьшими размерами зоны эрозии на срезе разрядной камеры в радиальном направлении, σmax участок изолятора разрядной камеры с наибольшими размерами зоны эрозии в радиальном направлении.
вектор усилия, σmin участок изолятора разрядной камеры с наименьшими размерами зоны эрозии на срезе разрядной камеры в радиальном направлении, σmax участок изолятора разрядной камеры с наибольшими размерами зоны эрозии в радиальном направлении.
Испытания по определению направления действия вектора усилия проводят следующим образом.
Работают при номинальных параметрах в течение времени, достаточного для образования границ зоны эрозии. Причем эту работу можно совместить с приемочными испытаниями по определению усилия ускорителя автономно или в составе ЭРДУ.
Определяют участки с наибольшими и наименьшими размерами зоны эрозии (Lmin и Lmax) либо непосредственными измерениями, либо размеры зоны эрозии измеряются в нескольких равномерно расположенных по азимуту сечениях, по полученным измерениям строится развертка с привязкой размеров зоны эрозии к конкретным сечениям зоны эрозии и на ней находят участки с наибольшими и наименьшими размерами зоны эрозии. За направление вектора усилия от оси ускорителя (направление его боковой составляющей) принимают направление от участка с наибольшими размерами зоны эрозии в осевом направлении к участку с наименьшими размерами зоны эрозии в этом же направлении.
Величину угла отклонения вектора усилия находят непосредственно из отношения разницы Lmax Lmin к диаметру наружной стенки изолятора разрядной камеры (Dpк).
Для определения положения вектора усилия, например, в процессе ресурсных испытаний после их окончания выполняют измерения толщины изолятора на срезе наружной стенки разрядной камеры. По полученным результатам замеров находят участки, в которых размер зоны эрозии в радиальном направлении (σ) на срезе разрядной камеры имеет наибольшее и наименьшее значение (σmax и σmin). Диаметральную плоскость сечения, проходящую через эти участки, принимают за плоскость, в которой находится вектор усилия, а за его направление от оси ускорителя принимают направление от участка с наименьшими размерами зоны эрозии в радиальном направлении к участку с наибольшими размерами зоны эрозии в радиальном направлении.
Для определения стабильности направления вектора усилия от геометрической оси ускорителя за какой-либо заданный промежуток времени в процессе выработки ресурса измерения размеров зоны эрозии выполняют до начала испытаний и после испытаний в течение этого заданного промежутка времени. По полученным результатам замеров находят участки с наибольшими и наименьшими размерами зоны эрозии. О стабильности направления вектора усилия во время выработки заданного промежутка времени судят по расположению плоскости продольного сечения разрядной камеры, проходящей через границы этих участков. В случае стабильного положения вектора усилия положение этой плоскости между двумя последовательными замерами остается неизменным. Изменение положения плоскости продольного сечения разрядной камеры, проходящей через границы участков с наибольшими и наименьшими размерами эрозии, между этими двумя последовательными замерами показывает, что направление вектора усилия после выполнения первого из них изменилось.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИАЛЬНЫЙ УСКОРИТЕЛЬ ПЛАЗМЫ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1993 |
|
RU2040125C1 |
| ПЛАЗМЕННЫЙ УСКОРИТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1992 |
|
RU2030134C1 |
| УСКОРИТЕЛЬ С АНОДНЫМ СЛОЕМ | 1995 |
|
RU2089052C1 |
| ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1999 |
|
RU2152538C1 |
| ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1992 |
|
RU2022167C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ УСКОРИТЕЛЯ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ И ПРОТЯЖЕННОЙ ЗОНОЙ УСКОРЕНИЯ | 1992 |
|
RU2025056C1 |
| ПОЛИКАНАЛЬНЫЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1992 |
|
RU2008525C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЛАЗМЕННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2234619C2 |
| ПЛАЗМЕННЫЙ УСКОРИТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1992 |
|
RU2022493C1 |
| ПЛАЗМЕННЫЙ УСКОРИТЕЛЬ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 2010 |
|
RU2447625C2 |
Использование: в системах коррекции космических аппаратов, а также в плазменной технологии для определения положения струи относительно обрабатываемой поверхности, в частности в способе испытаний по определению вектора усилия плазменных ускорителей с замкнутым дрейфом электронов. Сущность изобретения: способ предусматривает определение вектора усилия ускорителя по геометрическим характеристикам зоны эрозии. Плоскость, проходящую через границы участков с наибольшей и наименьшей величиной эрозии на наружной стенке разрядной камеры ускорителя в осевом направлении, принимают за плоскость, в которой расположена боковая составляющая вектора усилия. О направлении последнего и величине угла его отклонения от оси симметрии разрядной камеры ускорителя судят по соотношению между геометрическими размерами участков наружной стенки разрядной камеры с наибольшей и наименьшей величиной эрозии. Это уменьшает потребное приборное обеспечение испытаний, сокращает время последних и позволяет в процессе ресурсных испытаний ускорителей определить положение вектора усилия. 4 з.п. ф-лы, 2 ил.
Aо d L/Dр.к,
где d L разность наибольшей и наименьшей длин участков эрозии на наружной стенке канала разрядной камеры в осевом направлении;
Dр.к диаметр наружной стенки канала разрядной камеры.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Архипов Б.А | |||
| и др | |||
| Управление вектором усилия в УЗДП | |||
| YII Всесоюзная конференция по плазменным ускорителям и ионным инжекторам | |||
| Тезисы докладов | |||
| Харьков, ХАИ, 1989, с.81-82. | |||
