Изобретение относится к простому с низкой стоимостью устройству управления для перемещения шпонок, контролирующих качание рычагов кривошипа ротационной каретки ткацкого станка.
В ротационных каретках шатун кривошипа монтируют свободно на приводном валу через кулачок, который помещают между валом и большим концом шатуна для жесткого соединения с помощью шпонки с указанным шатуном или указанным валом, который вращается с прерывистым движением с остановками через 180о. Шпонка помещена в соответствующий радиальный паз в указанном кулачке и в течение пауз приводного вала понуждается средствами механического движения так, что один из ее концов входит в зацепление с одним из двух противоположных радиальных пазов, предусмотренных в большом конце шатуна или одним из двух противоположных радиальных пазов в приводном валу.
Таким способом в каждый момент шпонка жестко соединяет кулачок с приводным валом, кулачок вращается, чтобы производить качание шатуна кривошипа с последующей передачей движения рамке с галевами ткацкого станка.
Сущностью изобретения является создание надежной и экономичной каретки, способной работать вплоть до максимальных скоростей современных пневмо- и водяных ткацких станков, совершающих порядка 1200 колебаний в минуту.
Это достигается по существу управляющим устройством для перемещения шпонки, которое вставляет и извлекает шпонку в и из радиальных пазов в приводном валу без использования пружин и в соответствии с оптимальным законом движения, определенным предпочтительно кулачком.
На фиг. 1 изображен разрез с частичным аксонометрическим видом устройства управления в соответствии с предлагаемым изобретением; на фиг. 2 вид в плане деталей устройства управления по фиг. 1; на фиг. 3 сечение деталей по фиг. 2; на фиг. 4 вид спереди в разрезе устройства управления по фиг. 1 со шпонкой, вставленной во внутрь радиального паза в большем конце шатуна кривошипа; на фиг. 5-9 -виды спереди, показывающие различные стадии работы устройства управления по фиг. 1; на фиг. 10 вид спереди модификации в соответствии с изобретением устройства управления по фиг. 1.
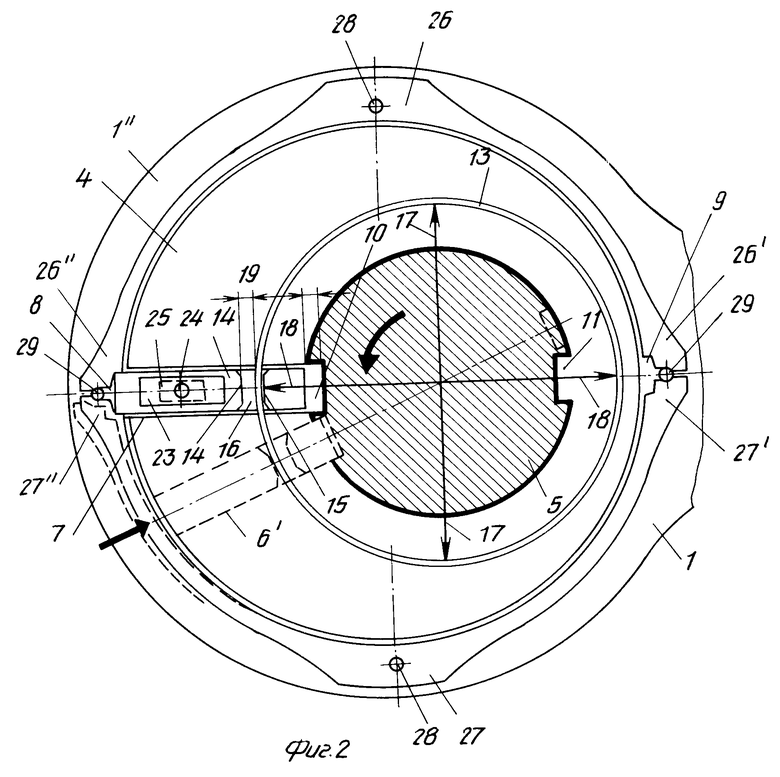
Устройство управления ротационной каретки содержит шатун 1, малый конец 1' которого соединен с журавликом 2, который через ряд звеньев приводит в движение ремизную рамку 3. Больший конец 1'' шатуна 1 смонтирован свободно через кулачок 4 на приводном валу 5, вращающемся с паузами через каждые 180о посредством механизма модуляции известного типа, поэтому не показанного на чертеже. Кулачок 4 жестко соединяется с указанным шатуном 1 или с валом 5 посредством шпонки 6, которая монтируется в соответствующем радиальном пазу 7 в кулачке 4, и один из ее концов вставляется или сохраняется вставленным в течение пауз приводного вала 5 вовнутрь или в одном из двух противоположных радиальных пазов 8 или 9, выполненных в большем конце 1'' шатуна 1, или одном из двух противоположных радиальных пазов 10 и 11 в приводном валу 5 в соответствии с командами программатора 12 посредством действия управляющего кольца 13, которое помещается по одной оси с валом 5 для взаимодействия со стенками 14 или 15 поперечного паза 16 в шпонке.
Управляющее кольцо 13 имеет эллипсную форму (фиг. 2) с меньшей осью 17 эллипса, равной большей оси 18 без длины рабочего хода 19, совершаемого шпонкой 6 в течение ее вставки вовнутрь или извлечения из указанных радиальных пазов 8, 9, 10 или 11, и закреплено на рабочем рычаге 20, точка 21 опоры которого лежит на продолжении меньшей оси 17 эллиптического управляющего кольца 13, а большая ось 18 которого, таким образом, лежит вдоль оси 22, соединяющей противоположные радиальные пазы 8 и 9 в большем конце 1'' шатуна 1. Паз 16 в шпонке 6 имеет ширину, равную сумме толщины управляющего кольца 13 и длины рабочего хода 19 шпонки, снабженной листовой пружиной 23, которая давит на нее перпендикулярно скользящей поверхности радиального паза 7 кулачка 4. Пружина 23 опирается для этой цели на штифт 24, жестко связанный с кулачком 4, и проходит через прорезь 25 (фиг. 2 и 3), выполненную в шпонке 6. Противоположные пазы 8 и 9 в большем конце 1'' шатуна 1 образованы на двух противоположных примыкающих концах 26', 26'' и 27', 27'' соответственно двух зеркальных эластичных полуколец 26 и 27, закрепленных по их центральной линии на большем конце шатуна 1 посредством фиксирующих штифтов 28 и предварительно нагруженных на два центрирующих штифта 29, расположенных выше двух радиальных пазов 8 и 9, а также прикреплены к большему концу 1'' шатуна 1.
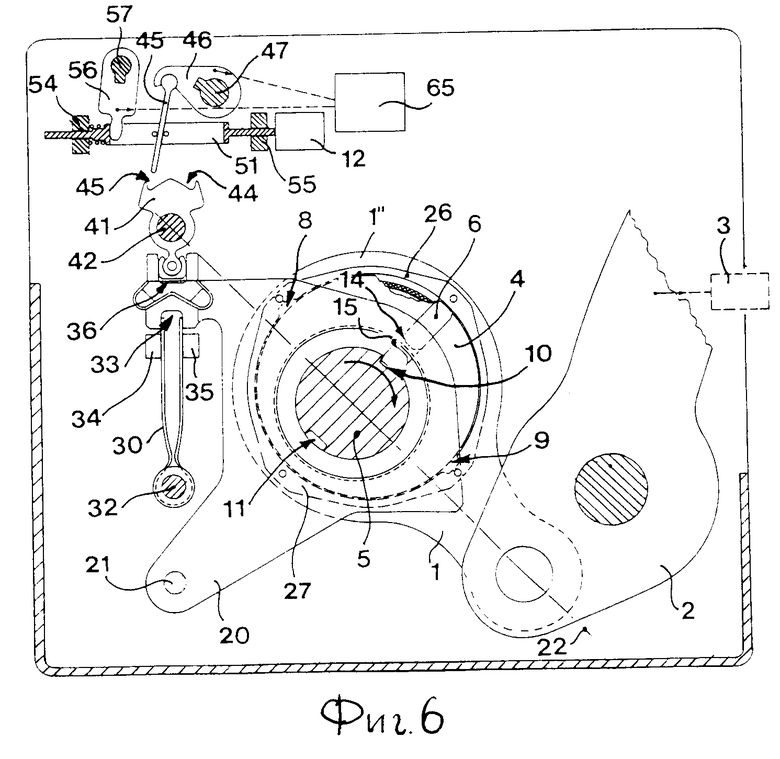
Рабочий рычаг 20 также взаимодействует с V-образной пружиной 30, ось 31 симметрии которой (фиг. 4) проходит через ось 32 опоры пружины и через точку 21 опоры рабочего рычага 20. Концы 30' и 30'' двух ответвлений пружины 30 вставлены в полость 33, обращенную к точке 21 опоры, и находятся в теле рычага 20. Пружина 30 предварительно нагружена между двумя фиксированными плечами 34 и 35, устроенными симметрично относительно оси 31 симметрии. Рабочий рычаг 20 также включает в себя вторую полость 36, противоположную предыдущей и определяемую противоположными концами 37' и 37'' W-образной пружины 37, смонтированной предварительно нагруженной при высокой нагрузке посредством двух внутренних выступов 38 и 39, установленных на рабочем рычаге 20. Вторая полость 36 взаимодействует с салазками 40, соединенными с нижним концом 41' сектора 41, который качается относительно оси 42 симметрично по отношению к оси 31 симметрии V-образной пружины 30 и который в своей верхней части имеет две выемки 43 и 44, симметричные относительно оси 31 симметрии V-образной пружины 30, для взаимодействия с нижним концом вышерасположенной штанги 45 толкателя, соединенной в ее верхнем конце с выступающей частью 46 вала 47, который качается под воздействием через соединение 48 приводного механизма предпочтительно кулачкового типа, синхронизированного с механизмом модуляции. Штанга 45 толкателя со скольжением вставляется между двумя направляющими штифтами 49 и 50 игольного селектора 51, который взаимодействует с отверстием 52 (фиг. 1) программатора 12 посредством действия нажимной пружины 53, действующей между селектором и одной из направляющих 54 и 55 соответственно для направления и поддержки селектора. Отбойный гребень 56 возвращает селектор в исходное положение, качаясь относительно оси 57 от соединения 58.
Программатор 12, который через свои отверстия 52 взаимодействует с игольными селекторами 51, может быть механическим программатором типа перфоленточного или перфорированных барабанов, или электромагнитным программатором.
В соответствии с модификацией изобретения, показанной на фиг. 10, качающий сектор представлен в виде двух расширяющихся рычагов 59 и 60, включающих в себя в своей верхней части указанные две выемки 43 и 44. Рычаги 59 и 60 навешивают на оси 61 и 62 вращения, зеркальные относительно оси 31, и соединяют вместе в их нижней части соединительным звеном 63, содержащим в своей центральной области скользящий блок 64, взаимодействующий с второй полостью 36 рабочего рычага 20. Привод (механизм) программатора обозначен позицией 65.
Работает устройство следующим образом.
Начиная с состояния, показанного на фиг. 4, в котором шпонка 6 вставлена в радиальный паз 8 в большем конце 1'' шатуна 1, который, следовательно, остается неподвижным вместе со своим кулачком 4.
Программатор 12 дает команду закрытия в отверстие 52, которое взаимодействует с иглой селектора 51. В этом случае игольный селектор 51 остается в позиции, показанной на фиг. 4, а следующая команда посредством механизма 65 перемещает штангу 45 толкателя во взаимодействие с выемкой 43 качающего сектора 41, чтобы заставить его вращаться против часовой стрелки, с последующим вращением по часовой стрелке рабочего рычага 20. Эллиптическое кольцо 13 посредством давления на стенку 15 поперечного паза 16 в шпонке 6 заставляет последнюю перемещаться радиально из указанного паза 8 и 10 приводного вала 5 (фиг. 5). Все это происходит в течение паузы во вращательном движении приводного вала 5, вызванном механизмом модуляции, который синхронизирован с механизмом 65. Таким образом, когда приводной вал 5 начинает снова вращаться, штанга 45 толкателя поднимается в свою первоначальную позицию механизмом 65, позволяя пружине 30 V-образной формы ответвлениями 30' и 30'' возвратить рычаг 20 в свою начальную позицию с эллиптическим кольцом 13, центрированным вокруг приводного вала 5. В то же время кулачок 4, теперь соединенный жестко с приводным валом 5 указанной шпонкой 6, начинает вращаться, перемещая шатун 1, журавлик 2 и ремизную рамку 3.
После поворота на 90о вала 5 и кулачка 4 шпонка 6 находится в положении, показанном на фиг. 6.
После поворота на 180о вала 5 следующая пауза во вращении указанного вала происходит при шатуне 1, расположенном в одной из двух мертвых точек его рабочего хода, и кольцо 13 находится в контакте со стенкой 14 поперечного паза 16 шпонки 6, как показано на фиг. 7. В этой точке могут произойти две ситуации, т.е. или программатор 12 повторно подтвердит команду закрытия отверстия 52, или даст команду открытия указанного отверстия 52.
В первом случае игольный селектор 51 остается в иллюстрируемой позиции, и следующая команда посредством механизма 65 возвращает штангу 45 толкателя во взаимодействие с выемкой 43 качающегося сектора 41. Это вызывает новое вращение против часовой стрелки сектора 41 с последующим вращением по часовой стрелке рабочего рычага 20, эллиптическое кольцо 13 которого посредством давления на стенку 14 поперечного паза 16 шпонки 6 радиально перемещает эту последнюю из паза 10 приводного вала 5 в радиальный паз 9 в большем конце 1'' шатуна 1 (фиг. 8). Таким образом, приводной вал 5 опять вращается, кулачок 4 остается в состоянии покоя вместе с шатуном 1, к которому присоединен шпонкой 6.
Во втором случае, в котором программатор 12 открывает отверстие 52, игла селектора 51 проникает в указанное отверстие 52 так, что селектор перемещает штангу 45 толкателя в выемку 44 качающегося сектора 41 (фиг. 9) с тем результатом, что следующая команда механизма 65 вызывает вращение по часовой стрелке рабочего рычага 20 и, следовательно, движение его эллиптического кольца 13 от его контакта со стенкой 14 поперечного паза 16 шпонки 6 (фиг. 7) до его контакта со стенкой 15 указанного паза (фиг. 9), поскольку из-за придания пазу 16 особых размеров это движение не имеет какого-либо эффекта на шпонку 6, которая остается вставленной в паз 10 приводного вала 5.
На фиг. 2 показано формирование радиальных пазов 8 и 9 на большем конце 1'' шатуна 1 посредством двух эластичных полуколец 26 и 27 с увеличением жесткости по направлению к их центральной фиксированной точке, что предотвращает повреждение из-за неправильной частичной вставки шпонки в радиальные пазы в течение реверсивного пробега приводного вала, вращающегося против часовой стрелки, когда возможная эластичная деформация указанных полуколец создает увеличенную радиальную силы F на конце шпонки, которая вызывает автоматическую и полную вставку шпонки в радиальные пазы приводного вала 5.








Сущность изобретения: устройство управления высокоскоростной ротационной каретки содержит шпонку с поперечным пазом с шириной, равной толщине управляющего кольца, с которым он взаимодействует, и длине хода, совершаемого шпонкой при ее вставке внутрь или извлечении из радиальных пазов в большом конце шатуна кривошипа или в приводном валу. Управляющее кольцо имеет эллиптическую форму и установлено на рабочем рычаге, который, вращаясь на меньшей оси эллипса и удерживаясь в позиции покоя V-образной пружиной, вынужден качаться в одну или другую сторону относительно оси симметрии пружины под воздействием штанги толкателя, которая приводится в движение кулачковым механизмом и перемещается игольным сектором, управляемым программатором, чтобы воздействовать на одну из двух выемок, выполненных в качающемся секторе. 8 з.п. ф-лы, 10 ил.
| Патент СССР N 1296013, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
