Изобретение относится к радиолокации и может быть использовано в РЛС обнаружения и сопровождения для измерения азимута и дальности воздушных целей.
Известен фазовый дальномер, содержащий антенную систему из передающей и приемной антенн, генератор высотой частоты передатчика, генератор масштабной частоты, модулирующий сигнал передатчика, приемник и фазометр, измеряющий сдвиг фаз напряжения генератора масштабной частоты и принимаемого сигнала. При этом дальность цели определяют по результату измерения сдвига фаз. Эту РЛС можно также использовать для измерения азимута цели путем вращения антенной системы в азимутальной плоскости. В этом случае азимут цели определяют по положению антенной системы в момент ее обнаружения.
Однако при использовании антенн со сравнительно широкой диаграммой направленности точность измерения азимута цели будет низкой.
Известна также моноимпульсная амплитудно-разностная РЛС, которую можно использовать для измерения азимута и дальности воздушных целей. Эта РЛС обеспечивает при автосопровождении непрерывное совмещение разносигнального направления антенной системы с направлением на цель. При этом азимут цели определяют по положению антенны.
Однако при неидентичности коэффициентов усиления двух приемников эта РЛС будет иметь низкую точность измерения азимута цели. Кроме того, при использовании зондирующих импульсов сравнительно большой длительности РЛС будет иметь низкую точность измерения дальности.
Наиболее близкой к изобретению является моноимпульсная амплитудная суммарно-разностная двухкоординатная РЛС, которую можно использовать для измерения азимута и дальности цели. Эта РЛС содержит одну приемно-передающую зеркальную антенну, импульсный передатчик, два приемника, антенный переключатель, высокочастотный суммарно-разностный мост, фазовый детектор и следящую систему управления антенной по азимуту.
Однако при использовании зондирующих радиоимпульсов сравнительно большой длительности такая РЛС имеет низкую точность измерения дальности.
Задача изобретения повышение точности измерения дальности и азимута воздушных целей при использовании зондирующих импульсов сравнительно большой длительности и антенны с широкой диаграммой направленности, что позволит уменьшить требуемые размеры антенны, необходимую импульсную мощность передатчика и упростить конструкцию высокочастотной части РЛС.
Для этого в фазовой двухкоординатной РЛС, содержащей одну приемно-передающую зеркальную антенну с двумя передающими облучателями, симметрично смещенными относительно фокуса зеркала антенны, приемник, передатчик, состоящий из генератора импульсного модулирующего напряжения, модулятора и генератора высокой частоты, и антенный переключатель, в фокусе параболического зеркала антенны установлен приемный облучатель, непосредственно связанный с приемником, два смещенных передающих облучателя непосредственно связаны с антенным переключателем, подключающим их поочередно от импульса к импульсу к передатчику, который формирует периодическую последовательность пары одинаковых прямоугольных радиоимпульсов, смещенных по времени на величину То менее половины периода следования, на одном из выходов генератора импульсного модулирующего напряжения передатчика установлен узкополосный фильтр, настроенный на частоту следования импульсов F, на выходе приемника установлены два узкополосных фильтра, выделяющих первую и вторую гармоники принятого видеосигнала соответственно, в состав РЛС дополнительно включены фазометр, измеряющий сдвиг фаз Δ ϕ первых гармоник модулирующего напряжения передатчика и видеосигнала приемника, и блок вычисления, определяющий по измеренному сдвигу фаз Δ ϕ и отношению амплитуд напряжений U1, U2 первой и второй гармоники видеосигнала приемника азимутальный угол цели α путем решения следующего трансцендентного уравнения: cosπFτ
cosπFτ  0 (1) и дальность цели R по формуле
0 (1) и дальность цели R по формуле
R  +arctg
+arctg
arctg 
 (2) где α азимутальный угол цели, отсчитываемый от оси антенны;
(2) где α азимутальный угол цели, отсчитываемый от оси антенны;
F1(α), F2(α) нормированные диаграммы направленности антенны в азимутальной плоскости при запитке антенны правым или левым смещенным облучателем соответственно;
F частота следования импульсов;
То смещение импульсов пары по времени;
τ длительность импульса;
U1, U2 амплитуды напряжений первой и второй гармоники видеосигнала приемника;
R дальность цели;
С скорость света;
Δ ϕ сдвиг фаз первых гармоник импульсного модулирующего напряжения передатчика и видеосигнала приемника.
На чертеже представлены упрощенная структурная схема фазовой двухкоординатной РЛС, а также приемопередающая зеркальная антенна с тремя облучателями, диаграммы направленности этой антенны при работе на передачу и приемная диаграмма направленности.
Фазовая двухкоординатная РЛС содержит приемопередающую зеркальную антенну 11, состоящую из параболического зеркала 1, расположенного в фокусе зеркала приемного облучателя 2 и двух передающих облучателей 3 и 4, антенный переключатель 5, передатчик 15, состоящий из генераторов 6 и 7 высокой частоты и импульсного модулирующего напряжения соответственно и модулятора 8, узкополосный фильтр 9, приемник 10, узкополосные фильтры 11 и 12, фазометр 13 и блок 14 вычисления азимутального угла цели и дальности цели.
Физическая сущность и принцип действия предложенного устройства поясняются следующим.
Модулирующее напряжение передатчика 15 представляет собой периодическую последовательность с частотой следования F пары одинаковых прямоугольных импульсов, смещенных по времени на величину То менее половины периода следования. При этом комплексная амплитуда  первой гармоники модулирующего напряжения на частоте следования F определяется следующим известным соотношением:
первой гармоники модулирующего напряжения на частоте следования F определяется следующим известным соотношением: =
=  sinπF
sinπF 1+e
1+e , (3) где Ao амплитуда импульса;
, (3) где Ao амплитуда импульса;
τ длительность импульса.
Комплексные амплитуды  ,
, первой и второй гармоники длительной последовательности импульсов принимаемых видеосигналов аналогично определяются следующими формулами:
первой и второй гармоники длительной последовательности импульсов принимаемых видеосигналов аналогично определяются следующими формулами: 
 sin(πFτ)
sin(πFτ) B1+B2e
B1+B2e e
e , (4)
, (4)
 sin(2πFτ)
sin(2πFτ) B1+B2e
B1+B2e e
e , (5) где tз время запаздывания эхо-сигнала цели относительно зондирующего сигнала;
, (5) где tз время запаздывания эхо-сигнала цели относительно зондирующего сигнала;
B1, B2 амплитуды первого и второго импульсов пары принимаемых видеосигналов на выходе приемника.
Определив отношение амплитуд напряжений U2/U1 и учитывая, что амплитуды импульсов B1 и B2 пропорциональны соответствующим значениям диаграмм направленности антенны F1(α) и F2(α) при работе на передачу, получим трансцендентное уравнение для определения азимутального угла цели α Решение этого уравнения проводят на интервале азимутальной ширины главного лепестка диаграммы направленности антенны при работе на прием.
Из (3) и (4) определяется сдвиг фаз Δ ϕ напряжений  , и
, и 
Δ ϕ 2 πFtз + arg(1 + e -j2πFTo )
-arg[F1(α) + F2(α) e -j2πFTo (6)
Из (6) можно определить время запаздывания tз и, умножая его на половину скорости света, получить формулу для определения дальности цели R.
Перечисленные выше элементы структурной схемы предложенного устройства (фиг. 1) выполнены следующим образом.
Зеркальная антенна представляет собой обычную конструкцию из металлического параболического зеркала 1 и трех облучателей 2-4 (например, рупорных облучателей). Приемный облучатель 2 установлен в фокусе зеркала. Смещение передающих облучателей 3 и 4 из фокуса выбрано таким образом, чтобы соответствующие им диаграммы направленности антенны были отклонены по азимуту от оси зеркала на четверть азимутальной ширины главного лепестка диаграммы направленности по нулям. Генератор 7 модулирующего напряжения формирует периодическую последовательность с частотой следования импульса F пары одинаковых прямоугольных импульсов, смещенных по времени на величину То менее половины периода следования.
Длительность модулирующих импульсов τ целесообразно выбрать больше, чем в обычном импульсном дальномере, так как в предложенной РЛС точность измерения дальности не зависит от длительности импульса. Это позволяет снизить требуемую импульсную мощность передатчика и упростить конструкцию высокочастотной передающей части РЛС.
Генератор 7 имеет два выхода, один из которых имеет высокий уровень и связан с модулятором 8 передатчика, а другой низкий уровень и использован в схеме измерения сдвига фаз Δ ϕ. Приемник 10 выполнен по обычной супергетеродинной схеме с амплитудным детектором на выходе. Следует отметить, что ограничение сигнала и использование быстродействующей автоматической регулировки усиления в приемном канале недопустимы. Другие элементы структурной схемы РЛС на фиг. 1 выполнены по обычным известным схемам. В качестве блока 14 вычисления можно использовать универсальную микроЭВМ, которая должна иметь аналого-цифровой преобразователь для преобразования входных параметров Δ ϕ, U1 и U2 в цифровую форму.
Фазовая двухкоординатная РЛС работает следующим образом.
Передатчик 15 формирует периодическую последовательность с частотой следования F пары радиоимпульсов, смещенных по времени. Антенный переключатель 5 поочередно от импульса к импульсу переключает передатчик к передающим облучателями 3 и 4 антенны, которая излучает зондирующие сигналы. Прием эхо-сигналов цели осуществляют с помощью приемного облучателя 2 и приемника 10. Узкополосные фильтры 11 и 12 выделяют первую и вторую гармоники  и
и  принимаемых видеосигналов, а узкополосный фильтр 9 первую гармонику
принимаемых видеосигналов, а узкополосный фильтр 9 первую гармонику  модулирующего напряжения передатчика. Фазометр 13 измеряет сдвиг фаз низкочастотных напряжений
модулирующего напряжения передатчика. Фазометр 13 измеряет сдвиг фаз низкочастотных напряжений  и
и  , а блок 14 вычисления определяет азимут цели α и дальность цели R.
, а блок 14 вычисления определяет азимут цели α и дальность цели R.
Таким образом, предложенная фазовая двухкоординатная РЛС позволяет измерить азимут и дальность воздушных целей и при использовании сравнительно длинных зондирующих импульсов и антенны с широкой диаграммой направленности обеспечивает повышение точности измерений по сравнению с прототипом и приведенными аналогами.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОВЫСОТНАЯ ПОМЕХОЗАЩИЩЕННАЯ РЛС | 1992 |
|
RU2038606C1 |
| ФАЗОВЫЙ СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТЕЙ ДВУХ ВОЗДУШНЫХ ЦЕЛЕЙ | 1992 |
|
RU2013787C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ПОМЕХ МАЛОВЫСОТНОГО ДАЛЬНОМЕРА | 1992 |
|
RU2038605C1 |
| РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ УГЛА МЕСТА ВОЗДУШНЫХ ЦЕЛЕЙ | 1992 |
|
RU2038608C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА МЕСТА МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038613C1 |
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| НАЗЕМНЫЙ МАЛОВЫСОТНЫЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ УГЛА МЕСТА ЦЕЛИ | 1992 |
|
RU2038610C1 |
| ПОМЕХОЗАЩИЩЕННЫЙ МАЛОВЫСОТНЫЙ ИЗМЕРИТЕЛЬ УГЛА МЕСТА ЦЕЛИ | 1992 |
|
RU2038611C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА МАЛОВЫСОТНЫХ ЦЕЛЕЙ | 1992 |
|
RU2038607C1 |
| ПРИЕМНАЯ СИСТЕМА ДЛЯ МАЛОВЫСОТНОЙ РЛС ОБНАРУЖЕНИЯ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ИНТЕНСИВНЫХ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2040007C1 |
Использование: для измерения азимута и дальности воздушных целей. Сущность изобретения: фазовая двухкоординатная РЛС содержит приемно-передающую зеркальную антенну 1′, параболическое зеркало 1, приемный облучатель 2 и передающие облучатели 3 и 4, антенный переключатель 5, генераторы 6 и 7 высокой частоты и импульсного модулирующего напряжения соответственно, модулятор 8, узкополосные фильтры 9, 11 и 12, приемник 10, фазометр 13, блок 14 вычисления азимутального угла и дальности цели и передатчик 15, что позволяет при использовании сравнительно длинных зондирующих импульсов и антенны с широкой диаграммой направленности обеспечить повышение точности измерений. 1′- 5, 1′-10-12-14, 10-11-14, 11-13-14, 7-8-5, 6-8, 7-9. 1 ил.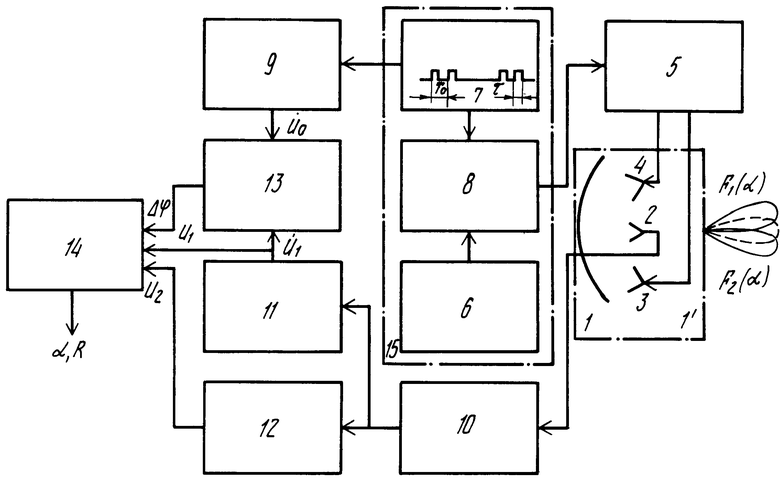
ФАЗОВАЯ ДВУХКООРДИНАТНАЯ РЛС, содержащая приемопередающую зеркальную антенну с двумя передающими облучателями, симметрично смещенными относительно фокуса параболического зеркала антенны, антенный переключатель, приемник, передатчик, состоящий из последовательно соединенных генератора высокой частоты и модулятора, а также генератора импульсного модулирующего напряжения, первый выход которого соединен с вторым входом модулятора, отличающаяся тем, что в фокусе параболического зеркала установлен приемный облучатель, непосредственно соединенный с входом приемника, два передающих облучателя соединены с выходом модулятора через антенный переключатель, также введены три узкополосных фильтра, фазометр и блок вычисления азимутального угла цели и дальности цели, при этом второй выход генератора импульсного модулирующего напряжения соединен с входом первого узкополосного фильтра, выход которого соединен с первым входом фазометра, выход приемника соединен с входами второго и третьего узкополосных фильтров, выход второго узкополосного фильтра соединен с вторым входом фазометра, выход которого соединен с первым входом блока вычисления азимутального угла цели и дальности цели, второй вход которого соединен с выходом второго узкополосного фильтра, выход третьего узкополосного фильтра соединен с третьим входом блока вычисления азимутального угла цели и дальности цели, при этом азимутальный угол цели и дальность цели вычисляются с помощью уравнений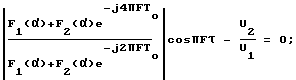

где α азимутальный угол цели относительно оси антенны;
R дальность цели;
T0 смещение по времени пары зондирующих импульсов передатчика;
F частота следования пары зондирующих импульсов;
Dv сдвиг фазы первых гармоник модулирующего напряжения передатчика и видеосигнала приемника;
F1(α),F2(α) нормированные диаграммы направленности антенны в азимутальной плоскости при запитке антенны правым или левым смещенным облучателем соответственно;
τ длительность зондирующего импульса;
C скорость света.
| Радиотехнические системы | |||
| Под ред.Ю.М.Казаринова | |||
| М.: Высшая школа, 1990, с.409. |
