Изобретение относится к прокатному производству и предназначено для захвата и удержания стержней на входной и выходной сторонах прошивных, раскатных и обкатных станов.
Известен механический захват [1] содержащий корпус, на котором закреплена направляющая с запирающей планкой и подвижной относительно направляющей головкой с шарнирно закрепленными в ней губками. На головке закреплен упор, контактирующий с деталью. Управление захватывающими губками осуществляется при помощи пружин, запирающей планки и стопорного устройства.
Недостатком этой конструкции является наличие пружин и стопорного устройства для запирания губок, что приводит к усложнению процесса закрывания и открывания губок из-за необходимости введения дополнительных управляющих движений захватывающих губок и корпуса. Кроме того, механический захват имеет высокие трудоемкость изготовления и обслуживания из-за наличия большого количества взаимодействующих между собой деталей и деталей, работающих с использованием сил упругости.
Известен механический захват [2] содержащий подвижный корпус, на котором шарниpно установлены качающиеся рычаги с захватывающими губками, и подвижную относительно корпуса направляющую с запирающим элементом.
Недостаток такой конструкции заключается в том, что наличие управляющего цилиндра, установленного в перемещаемом корпусе захвата и осуществляющего управление захватывающими губками через систему многозвенных рычагов, приводит к усложнению конструкции и увеличению трудоемкости изготовления и эксплуатации.
Известен наиболее близкий к изобретению по технической сущности и достигаемому результату механический захват [3] содержащий корпус с приводом его возвратно-поступательного перемещения по раме, установленный в корпусе с возможностью вращения полый шпиндель, смонтированные на шпинделе на осях качающиеся рычаги с захватывающими губками, направляющую с цилиндрическим выступом с биконическими торцами, установленную с возможностью перемещения относительно шпинделя и взаимодействия с упором.
Данный известный механический захват конструктивно сложен и трудоемок в изготовлении.
Техническим результатом изобретения является упрощение конструкции захвата и уменьшение трудоемкости изготовления и обслуживания.
Это достигается тем, что в механическом захвате, содержащем корпус с приводом его возвратно-поступательного перемещения по раме, установленный в корпус с возможностью вращения полый шпиндель, смонтированные на шпинделе на осях качающиеся рычаги с захватывающими губками, направляющую с цилиндрическим выступом с биконическими торцами, установленную с возможностью перемещения относительно шпинделя и взаимодействия с упором, в соответствии с изобретением качающиеся рычаги выполнены двуплечими, захватывающая губка размещена на внешнем плече каждого качающегося рычага, на внутреннем плече которого выполнены запирающий и захватывающий выступы, а между осью качания рычага и захватывающей губкой выполнен раскрывающий выступ, при этом цилиндрический выступ направляющей выполнен в виде распорного элемента, установленного с возможностью перемещения от запирающего выступа до захватывающей губки, упор выполнен с приводом перемещения относительно рамы и установлен на раме. Такой механический захват не имеет сложных конструктивных элементов в управлении захватывающими губками, а также многозвенных устройств, что позволяет упростить его конструкцию и уменьшить трудоемкость изготовления и обслуживания.
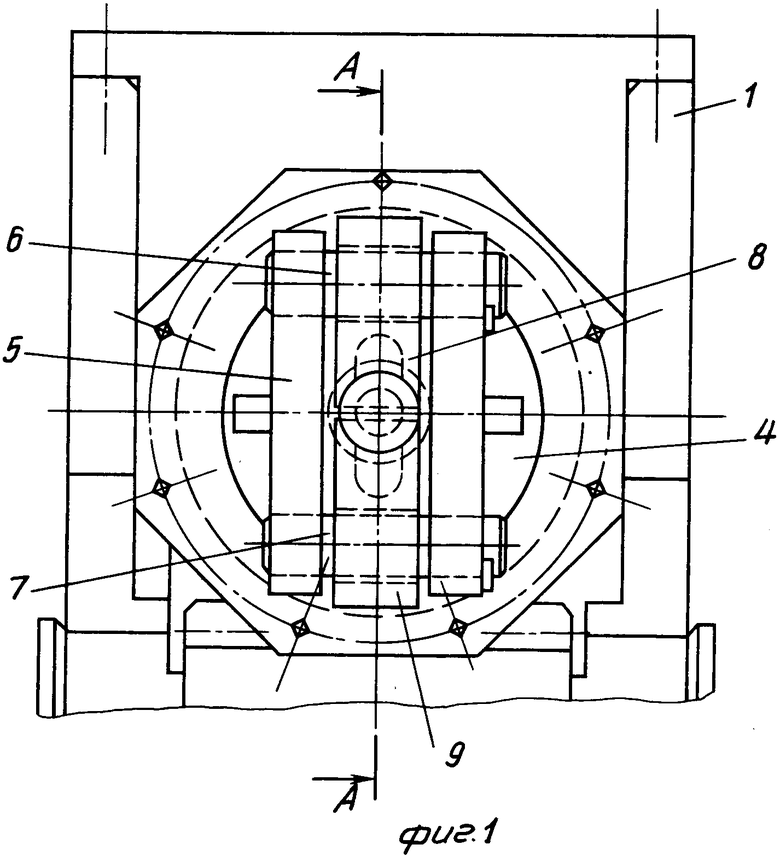
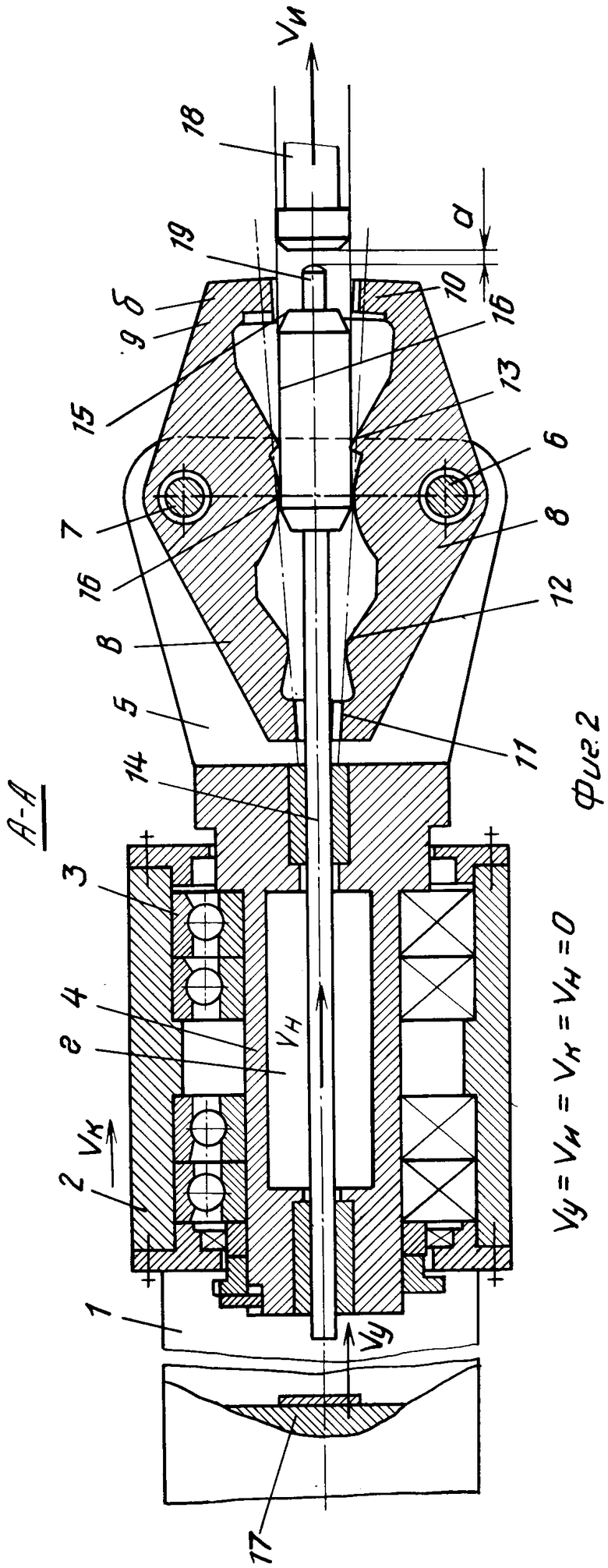
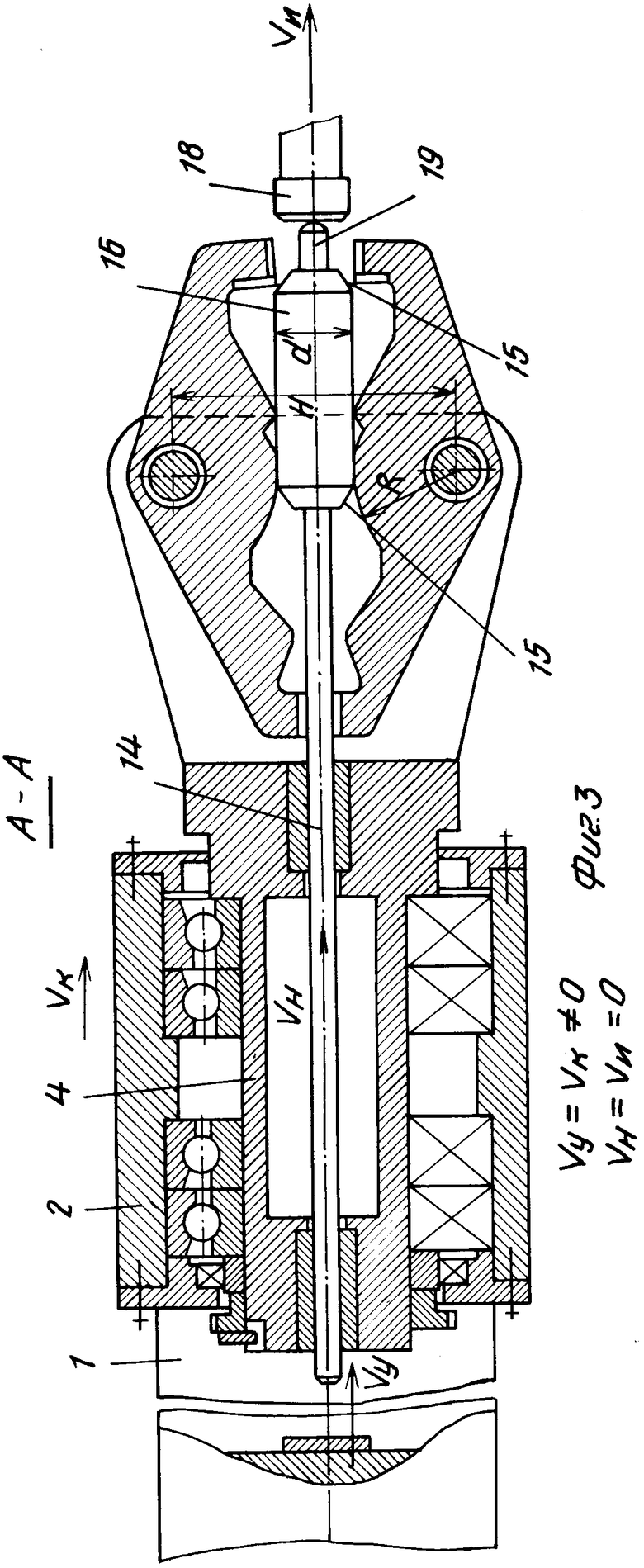
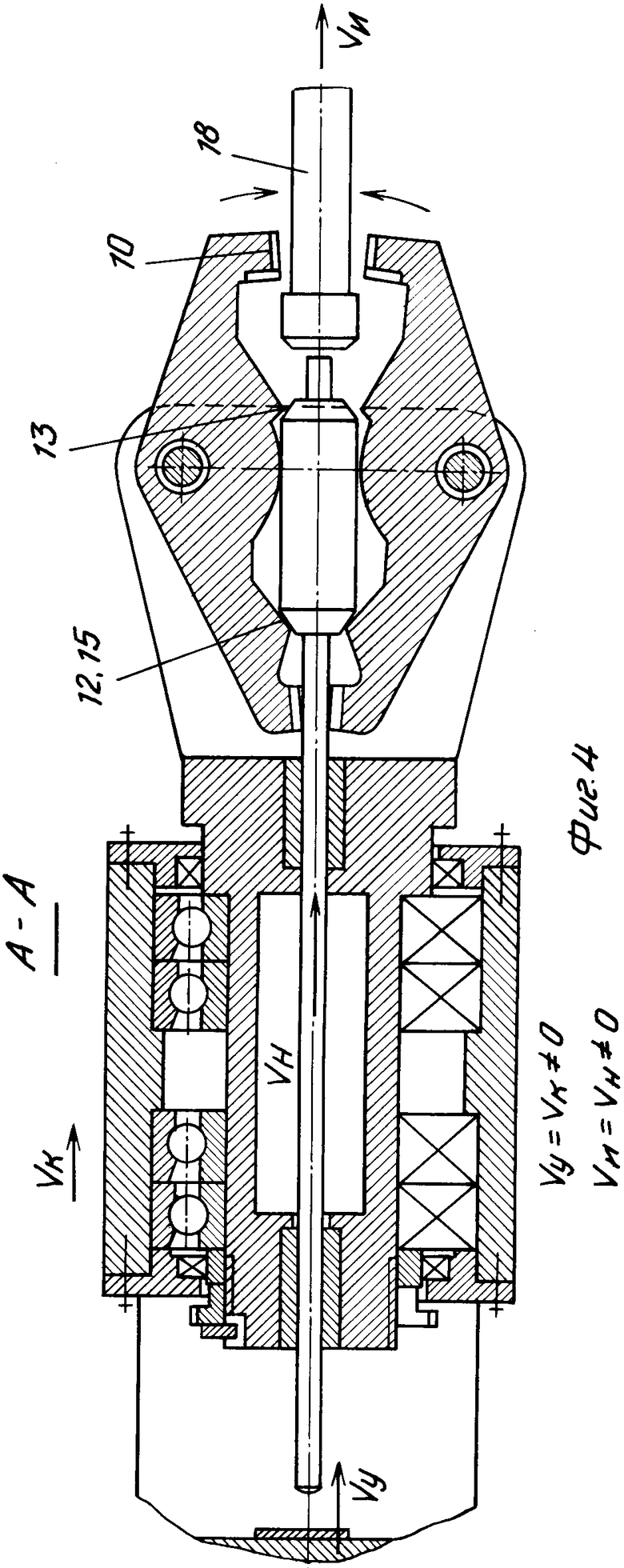
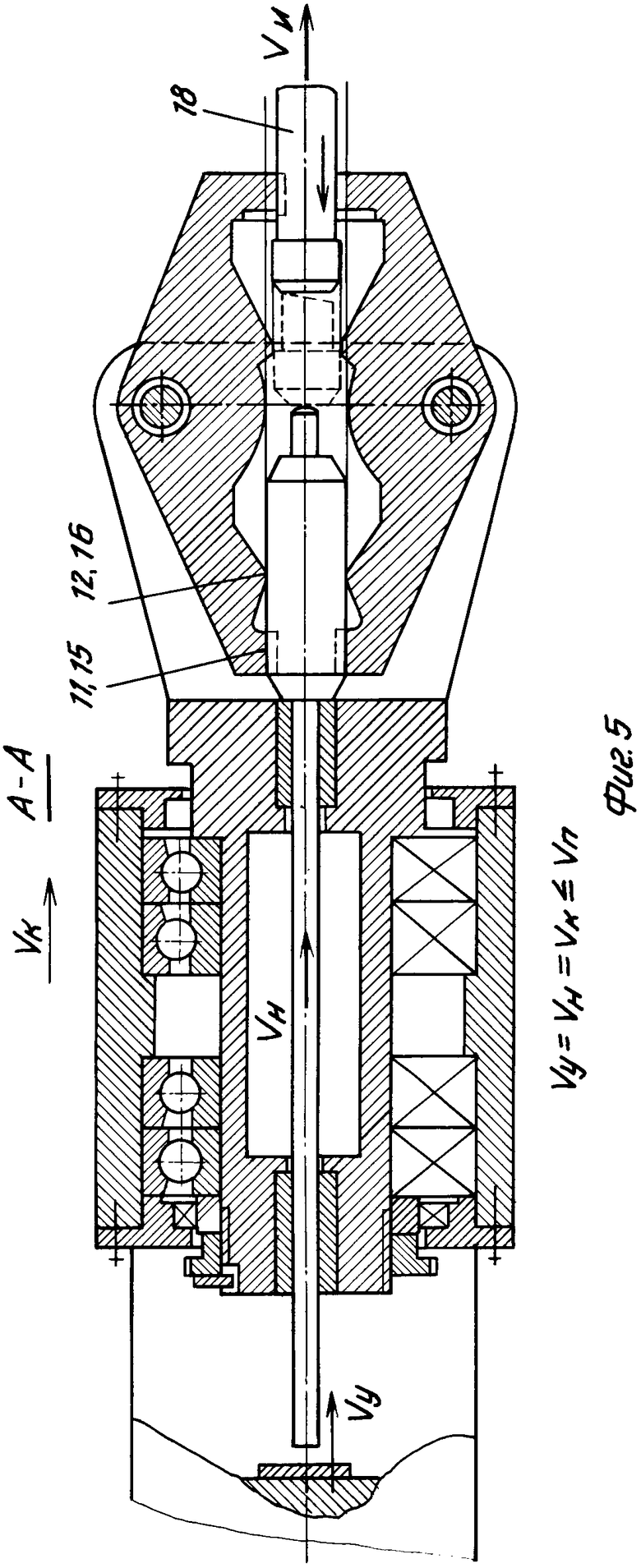
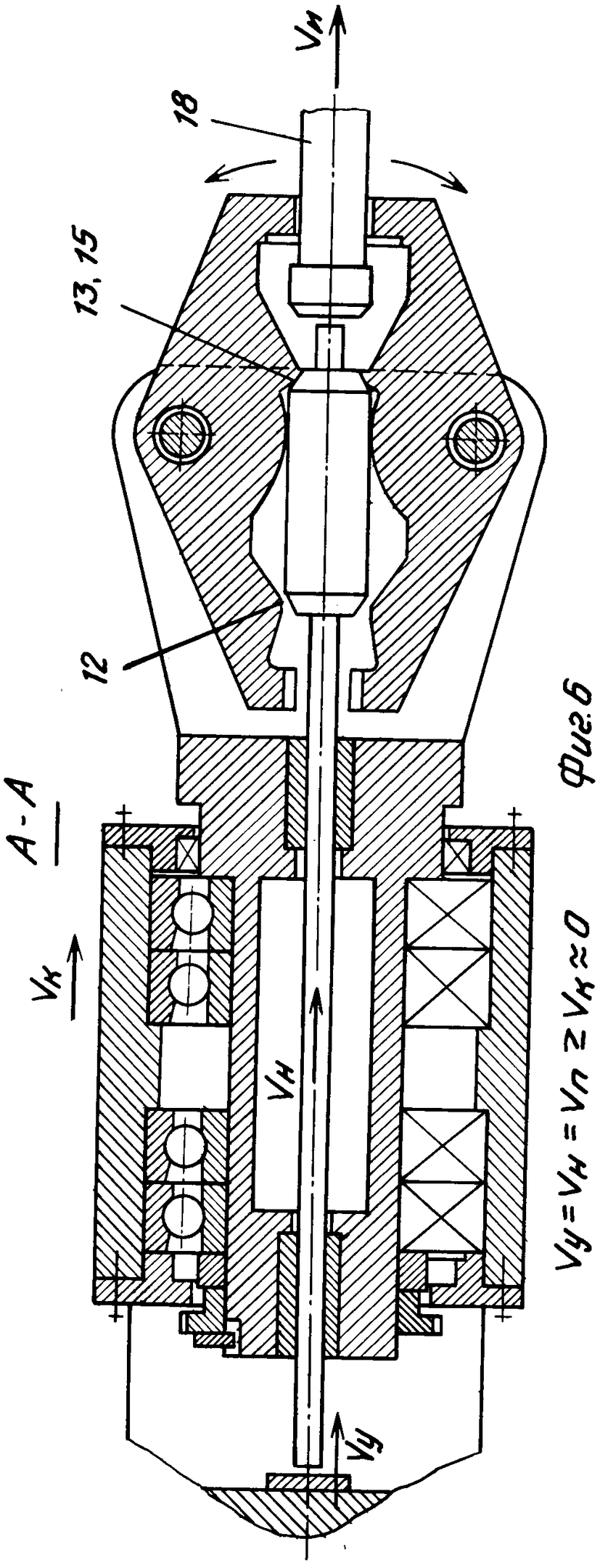
На фиг. 1 изображен механический захват, главный вид; на фиг. 2 разрез А-А на фиг. 1, положение направляющей до соприкосновения с изделием; на фиг. 3 то же, при соприкосновении с изделием; на фиг. 4 то же, при захвате изделия; на фиг. 5 то же, при удержании и перемещении изделия; на фиг. 6 то же, при освобождении изделия после перемещения.
Механический захват имеет перемещающийся по стационарной раме 1 корпус 2, в подшипниковых опорах 3 которого установлен шпиндель 4, в опорных щеках 5 которого установлены на осях 6 и 7 качающиеся рычаги 8 и 9. На внешнем плече б каждого качающегося рычага размещена захватывающая губка 10, а на внутреннем плече в запирающий выступ 11 и закрывающий выступ 12. Между осью 6 качания рычага и захватывающей губкой 10 выполнен раскрывающий выступ 13. В центральной расточке г шпинделя 4 размещена направляющая 14 с запирающим элементом, выполненным в виде биконического выступа 15 с распорным цилиндром 16. Упор 17, расположенный на стационарной раме 1, может быть выполнен подвижным, обеспечивая освобождение изделия 18 в любой точке, или неподвижным, обеспечивая освобождение изделия в заданном (исходном) положении.
Устройство работает следующим образом.
В исходном положении (фиг. 2) корпус 2 неподвижен и захватываемое изделие 18 находится на некотором расстоянии а от торца распорного цилиндра 16. При необходимости захвата изделия корпус начинает движение (Vк) в сторону изделия, упорный цилиндр 19 упирается торцом в изделие и направляющая 14 перемещается (Vн) в центральной расточке шпинделя 4 (фиг. 3 и 4). В момент касания конического участка биконического выступа 15 с закрывающим выступом 12 захватывающие губки 10 начинают сближаться (фиг. 4) и при выходе второго конического участка биконического выступа 15 за раскрывающий выступ 13 захватывающие губки 10 захватывают изделие 18. При этом цилиндрическая часть выступа 15 входит в расточку запирающего выступа 11, что позволяет надежно удерживать изделие при его движении вперед или назад или в неподвижном состоянии (фиг. 5).
При необходимости освобождения изделия 18 в работу включается упор 17, который перемещает направляющую 14 относительно шпинделя 4. При этом цилиндрический участок выступа 15 последовательно выходит из запирающего выступа 11, закрывающего выступа 12, и при касании коническим участком выступа 15 раскрывающего выступа 13 начинают раскрываться захватывающие губки 10, освобождая изделие 18 (фиг. 6).
Предложенный механический захват по сравнению с известными имеет простую конструкцию и низкую трудоемкость изготовления и обслуживания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ОБВЯЗКИ БУНТОВ | 1993 |
|
RU2054363C1 |
| УСТРОЙСТВО ДЛЯ ОБВЯЗКИ ПРОВОЛОКОЙ ПАКЕТА ПРОКАТА | 1993 |
|
RU2067957C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ И ТРАНСПОРТИРОВКИ ЦИЛИНДРИЧЕСКОГО ПРОКАТА ЧЕРЕЗ НАГРЕВАТЕЛЬНУЮ ПЕЧЬ | 2001 |
|
RU2218529C2 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЗАГОТОВОК | 2006 |
|
RU2308336C1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ ШПИНДЕЛЯ ПРОКАТНОГО СТАНА | 1994 |
|
RU2048221C1 |
| УСТАНОВКА ДЛЯ РЕЗКИ ПОЛОСЫ НА ПРЯМОУГОЛЬНЫЕ ЗАГОТОВКИ | 1993 |
|
RU2049605C1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ШПИНДЕЛЯ | 1996 |
|
RU2109585C1 |
| УСТРОЙСТВО ДЛЯ ПРАВКИ ИЗДЕЛИЙ РАСТЯЖЕНИЕМ | 2000 |
|
RU2189880C2 |
| УСТАНОВКА ДЛЯ ПОДАЧИ ТРУБ К ОБРАБАТЫВАЮЩЕЙ МАШИНЕ | 1993 |
|
RU2070447C1 |
| УСТРОЙСТВО ДЛЯ ОСЕВОЙ РЕГУЛИРОВКИ ВАЛКОВ ПРОКАТНОЙ КЛЕТИ | 1993 |
|
RU2066576C1 |
Использование: в трубопрокатном производстве для захвата и удержания стержней на входной и выходной сторонах прошивных, раскатных и обкатных станов. Сущность изобретения: механизм захвата содержит подвижный корпус, на котором установлены качающиеся рычаги с захватными губками, подвижную относительно корпуса направляющую с запирающим элементом. Качающиеся рычаги выполнены двуплечими и имеют запирающий и закрывающий выступы, при этом между осью качания рычага и захватывающей губкой выполнен раскрывающий выступ, а запирающий элемент выполнен биконическим. 1 з.п ф-лы, 6 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент США N 3648501, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
