Изобретение относится к области трубопрокатного производства, а точнее к грузоподъемному устройству для передачи горячих заготовок преимущественно цилиндрической формы к прокатному стану.
Заготовку необходимо взять с непрерывного рольганга (желоба) с углом раскрытия до 140°. Один конец любой заготовки имеет вылет 1600 мм относительно оси захвата, поэтому заготовку со смещенным центром тяжести для передачи необходимо зажать.
Известно грузоподъемное устройство для передачи заготовок, см. а.с. СССР №1184801, м.кл. В66С 17/04, заявл. 01.06.83, опубл. 15.10.85, содержащее приводную тележку, несущую захваты с приводом сведения и расположенный на тележке привод подъема захватов.
Захваты выполнены в виде системы рычагов, приводимых в действие от привода посредством ползуна.
Недостатком известного устройства является невозможность захвата и силового зажима заготовок с непрерывного рольганга (желоба), а также перенос заготовок со смещенным центром тяжести, так как захваты могут только охватывать заготовки с зазором и не могут ее зажимать.
Из известных грузоподъемных устройств для передачи заготовок наиболее близким по технической сущности является устройство, описанное в а.с. СССР №595229, м.кл. B65G 47/34, заявл. 06.03.72, опубл. 28.02.78.
Это устройство содержит приводную тележку, несущую хобот с захватами, привод сведения захватов и расположенный на тележке привод подъема хобота. Захваты выполнены в виде двух пар подвижных губок, одна из которых имеет общую тягу. Хобот выполнен в виде сдвоенных рычагов, соединенных траверсами.
Привод сведения захватов выполнен в виде коленчатого вала с приводом его вращения и тягой, соединенной посредством шарнира с тягой губок и оборудованной пружинным компенсатором, так как центры качания хобота и тяги не совпадают.
Недостаток известной конструкции грузоподъемного устройства заключается в том, что оно не может обеспечить силовой захват заготовок с непрерывного рольганга (желоба) со смещенным центром тяжести, так как его захваты не могут зажать заготовку, они ее лишь охватывают.
Кроме того, из-за большой консоли, на которой находится заготовка, хобот становится неустойчивым.
Задача настоящего изобретения состоит в создании грузоподъемного устройства для передачи заготовок, позволяющего обеспечить качественный и надежный захват и силовой зажим горячих заготовок широкого диапазона как по длине, так и по диаметру, со смещенным центром тяжести с непрерывного рольганга (желоба) и передачу их к прокатному стану.
Поставленная задача достигается тем, что грузоподъемное устройство для передачи заготовок, содержащее тележку с приводом перемещения, несущую хобот с захватами, один из которых подвижный с приводом сведения, и расположенный на тележке привод подъема хобота, согласно изобретению снабжено закрепленной на тележке и упирающейся в нее посредством двух наклонных балок П-образной вертикальной рамой, расположенной по ширине проема тележки, на концах которой с возможностью качания подвешен хобот, снабженный неподвижным захватом, причем подвижный и неподвижный захваты имеют верхние и нижние губки, выполненные сплошными по ширине хобота и с углом наклона 25-35° к вертикальной плоскости, при этом нижние губки неподвижного захвата перпендикулярны плоскости качания хобота, кроме того, привод сведения подвижного захвата расположен на хоботе и шарнирно соединен с ним, а привод подъема хобота выполнен в виде двух приводных звездочек и огибающих их цепей, шарнирно соединенных с хоботом.
Такое конструктивное выполнение грузоподъемного устройства для передачи заготовок позволит обеспечить качественный и надежный захват и силовой зажим горячих заготовок широкого диапазона со смещенным центром тяжести с непрерывного рольганга (желоба) и передачи их к прокатному стану.
Это достигается за счет того, что плоскость качания хобота перпендикулярна плоскости нижней губки неподвижного захвата, размещенного на самом хоботе, а также за счет того, что губки захватов выполнены с наклоном в 25-35° к вертикальной плоскости, что позволило заводить неподвижную губку за габарит заготовки и тем самым обеспечить наименьший ход подвижной губки под нагрузкой и качественный захват и зажим заготовки на рольганге. При угле наклона нижних губок неподвижного захвата к вертикальной плоскости меньше 25° ухудшаются условия захвата заготовки, а при угле наклона более 35° растут габариты устройства, что нежелательно. Кроме того, выполнение губок захватов сплошными по ширине качающегося хобота позволило зажимать заготовки со смещением их центра тяжести, а крепления цепей на ширине качающейся рамы обеспечивают устойчивое горизонтальное положение заготовкам со смещенным центром тяжести.
Для пояснения изобретения ниже приводится конкретный пример выполнения изобретения со ссылкой на прилагаемые чертежи, на которых:
на фиг.1 изображено грузоподъемное устройство для передачи заготовок;
на фиг.2 - то же, вид по стрелке А на фиг.1;
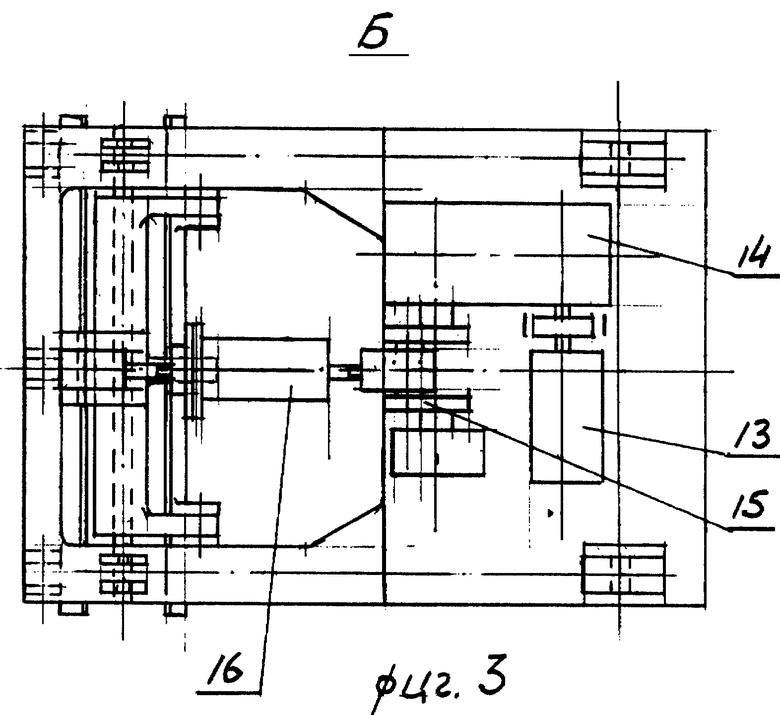
на фиг.3 - то же, вид по стрелке Б на фиг.1;
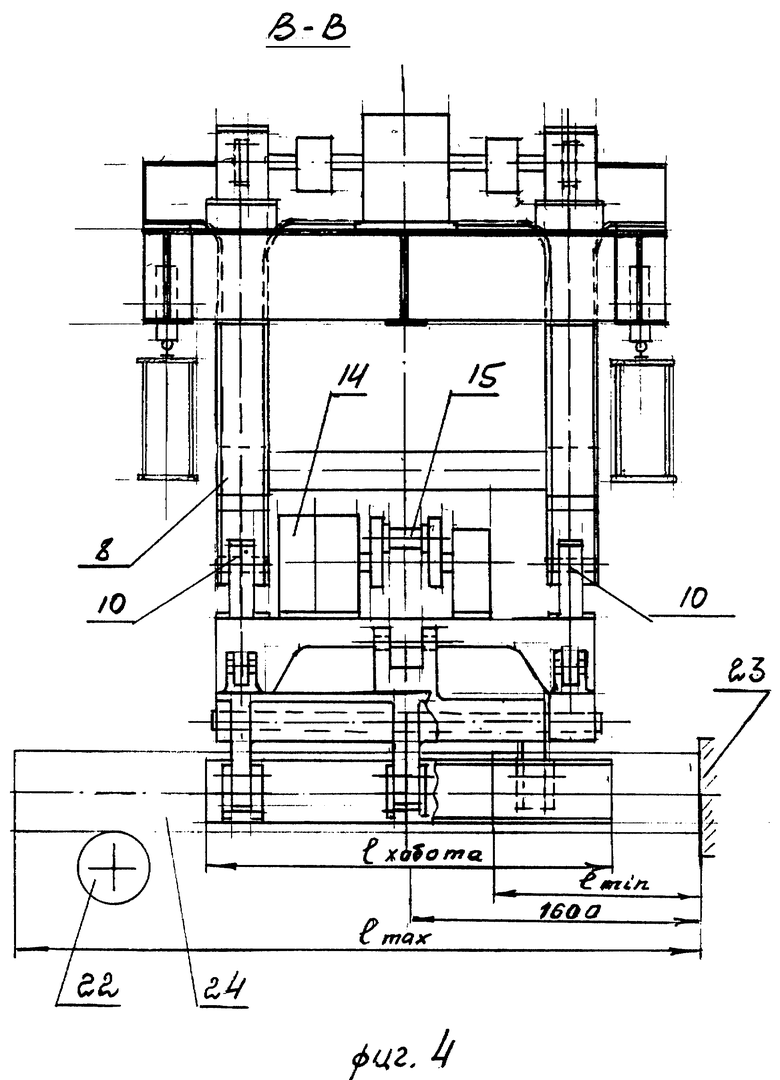
на фиг.4 - то же, вид В-В на фиг.1, захват заготовок различной длины от lmin до lmax;
на фиг.5 - схема захвата и зажима заготовок различного диаметра.
Грузоподъемное устройство для передачи заготовок содержит установленную на эстакаде приводную тележку 1, несущую хобот 2 с захватами 3, 4, привод сведения захватов и привод подъема хобота, расположенный на тележке 1. Одна пара колес 5 тележки 1 имеет привод от электродвигателя 6, а другая пара 7 - холостая. На тележке 1 в проеме со стороны холостых колес 7 закреплена П-образная вертикальная рама 8, упирающаяся в нее посредством двух наклонных балок 9. На концах вертикальной рамы 8 посредством двух шарниров 10 подвешен хобот 2 с захватами 3, 4, один из которых 3 - неподвижный закреплен на самом хоботе, а другой захват 4 - подвижный шарнирно соединен с хоботом 2. Каждый из захватов 3, 4 имеет верхние 11 и нижние 12 губки, выполненные сплошными по ширине хобота и с углом наклона 25-35° к вертикальной плоскости.
Нижние губки 12 неподвижного захвата 3 перпендикулярны плоскости O-O качания хобота 2. Привод сведения захвата 4 расположен на хоботе 2 и выполнен в виде электродвигателя 13, редуктора 14, совмещенного с ним коленвала 15, подпружиненной тяги 16 и рычага 17. Привод подъема хобота выполнен в виде расположенных на тележке 1 двух звездочек 18 с приводом от электродвигателя 19 и редуктора 20 и огибающих их цепей 21, шарнирно соединенных с хоботом 2 на расстоянии его ширины.
Для приема заготовок служит рольганг 22 с упором 23.
Устройство работает следующим образом.
В исходном положении хобот 2 находится в верхнем фиксированном положении с раскрытыми захватами 3, 4. Заготовки 24 ⊘ 360-450 мм, длиной 1400-4500 мм, массой 4500 кг при температуре 1250°С поступают по непрерывному рольгангу 22 до упора 23. Один конец заготовки lmax может иметь вылет 1600 мм относительно оси захвата.
Приводом подъема хобот 2 опускается к рольгангу 22, на котором лежит заготовка. Нижняя губка 12 неподвижного захвата 3 заводится под заготовку. Через рычаг 17, подпружиненную тягу 16, коленвал 15 с редуктором 14 и привод 13 подвижный захват 4 своими губками захватывает и зажимает заготовку со смещенным центром тяжести с непрерывного рольганга (желоба) 22.
После захвата заготовки хобот 2 посредством цепей 21 поднимается в верхнее положение, при этом благодаря шарнирному креплению цепей на ширине хобота обеспечивается устойчивое горизонтальное положение заготовкам со смещенным центром тяжести, а подпружиненная тяга благодаря силовому усилию пружины надежно удерживает заготовку.
С помощью тележки 1 заготовка транспортируется к прокатному стану, где после фиксированной остановки тележки хобот 2 через привод опускается, а подвижный захват 4 через рычаг, тягу, коленвал, редуктор, электродвигатель освобождает заготовку. Затем хобот 2 с захватами поднимается вверх. Далее цикл повторяется.
Предложенное грузоподъемное устройство для передачи заготовок по сравнению с известными позволит обеспечить качественный захват и зажим широкого диапазона заготовок со смещенным центром тяжести с непрерывного рольганга (желоба) и передачу их к прокатному стану для обеспечения его бесперебойной работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для межоперационного перемещения заготовок | 1982 |
|
SU1061904A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВКИ К ПРОКАТНОМУ СТАНУ | 2005 |
|
RU2294254C2 |
| УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ АГРЕГАТОВ ТЕРМИЧЕСКОЙ ОБРАБОТКИ ЗАГОТОВОК | 1970 |
|
SU259108A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ЗАГОТОВОК ИЗ НАГРЕВАТЕЛЬНОЙ ПЕЧИ | 1999 |
|
RU2165569C2 |
| Установка для подачи к ножницам, сортировки и удаления заготовок | 1985 |
|
SU1465196A1 |
| Опрокидывающее приспособление для проката | 1982 |
|
SU1289574A1 |
| Устройство для укладки заготовок протекторов | 1980 |
|
SU973390A1 |
| Автоматизированный технологический комплекс для обработки фасонного и сортового проката | 1987 |
|
SU1511020A1 |
| Устройство для передачи заготовок протекторов | 1980 |
|
SU956295A1 |
| Устройство для загрузки и выгрузки заготовок из нагревательной печи | 1985 |
|
SU1355850A1 |


Изобретение используется в трубопрокатном производстве для подъема и передачи заготовок преимущественно цилиндрической формы к прокатному стану. Грузоподъемное устройство для передачи заготовок содержит тележку с приводом перемещения, несущую хобот с подвижным и неподвижным захватами, привод сведения захватов и привод подъема хобота, расположенный на тележке. Одна пара колес тележки имеет привод от электродвигателя, а другая пара - холостая. На тележке в проеме со стороны холостых колес закреплена П-образная вертикальная рама, упирающаяся в нее посредством двух наклонных балок. На концах вертикальной рамы с возможностью качания подвешен хобот с захватами. Неподвижный захват закреплен на самом хоботе, а подвижный захват шарнирно соединен с хоботом. Каждый из захватов имеет верхние и нижние губки, выполненные сплошными по ширине хобота и с углом наклона 25-35° к вертикальной плоскости. Нижние губки неподвижного захвата перпендикулярны плоскости качания хобота. Привод сведения захватов расположен на хоботе и шарнирно соединен с ним. Привод подъема хобота выполнен в виде двух приводных звездочек и огибающих их цепей, шарнирно соединенных с хоботом. Обеспечиваются качественный захват и зажим широкого диапазона заготовок со смещенным центром тяжести с непрерывного рольганга (желоба) и передача их к прокатному стану для обеспечения его бесперебойной работы. 5 ил.
Грузоподъемное устройство для передачи заготовок, содержащее тележку с приводом перемещения, несущую хобот с захватами, один из которых подвижный с приводом сведения, и расположенный на тележке привод подъема хобота, отличающееся тем, что оно снабжено закрепленной на тележке и упирающейся в нее посредством двух наклонных балок П-образной вертикальной рамой, расположенной по ширине проема тележки, на концах которой с возможностью качания подвешен хобот, снабженный неподвижным захватом, причем подвижный и неподвижный захваты имеют верхние и нижние губки, выполненные сплошными по ширине хобота и с углом наклона 25-35° к вертикальной плоскости, при этом нижние губки неподвижного захвата перпендикулярны плоскости качания хобота, кроме того, привод сведения подвижного захвата расположен на хоботе и шарнирно соединен с ним, а привод подъема хобота выполнен в виде двух приводных звездочек и огибающих их цепей, шарнирно соединенных с хоботом.
| Грузоподъемное устройство для передачи заготовок | 1972 |
|
SU595229A1 |
| Устройство для передачи,подъема и кантовки рулонов | 1982 |
|
SU1042831A1 |
| Перекладчик проката | 1989 |
|
SU1678482A1 |
| US 5025912, 25.06.1991 | |||
| KR 20040041448, 17.05.2004. | |||

