Изобретение относится к геофизическим исследованиям и может быть использовано для возбуждения упругих волн при проведении разведки месторождений полезных ископаемых сейсмическим методом, а также при инженерно-геологических изысканиях.
Известно устройство для возбуждения сейсмических волн, содержащее транспортное средство, на котором размещены лебедочный механизм подъема-сбрасывания, соединенный тросом через захват-сбрасыватель с грузом, и опора с осью, и жестко связанную с осью, выполненную в виде стрелы вышку с роликом, соединенную с вращателем [1]
Это устройство не может предотвратить повторный удар груза о поверхность земли при его свободном падении с вышки-стрелы без захвата-сбрасывателя.
Известно устройство для возбуждения сейсмических волн, содержащее транспортное средство, механизм подъема-сбрасывания, соединенный через лебедку, полиспастную систему, состоящую из блоков и троса, с грузом, установленным с возможностью вертикального перемещения на мачте (раме) с вертикальными направляющими, которая установлена на транспортном средстве с возможностью вертикального перемещения относительно него и в нижней своей части шарнирно связана с излучающей плитой, имеющей датчик удара, соединенный с блоком (системой) управления и механизмом подъема-сбрасывания, выполненный в виде гидроцилиндра, на штоке которого установлен шкив, а шкивы и тросы полиспастной системы расположены на раме с вертикальными направляющими, причем отношение высоты направляющих рамы к величине рабочего хода штока гидроцилиндра равно передаточному числу полиспастной системы [2]
Недостаток устройства в его сложности и малой надежности механизма подъема-сбрасывания, который требует достаточно высокой точности в настройке и непрерывного контроля за ее параметрами.
Известно устройство для возбуждения сейсмических волн, содержащее вертикальную мачту с направляющими, падающий груз, механизм подъема-сбрасывания, соединенный тросом с лебедкой и грузом через систему блоков, излучающую плиту, причем механизм подъема-сбрасывания снабжен клещевым захватом с размещенными на его рычагах упругим элементом и узлом управления срабатыванием клещевого захвата [3]
Такое устройство не может предотвратить повторный удар груза по излучающей плите.
Техническим результатом изобретения является повышение сейсмической эффективности возбуждения сейсмических волн путем предотвращения повторных ударов по излучающей плите.
Технический результат достигается тем, что в устройстве для возбуждения сейсмических волн, содержащем вертикальную мачту с направляющими, излучающую плиту, падающий груз с головкой, механизм подъема-сбрасывания груза, соединенный тросом с лебедкой посредством системы блоков, состоящий из клещевого захвата головки груза с размещенным на его рычагах упругим элементом и узлом управления срабатыванием клещевого захвата, и датчик удара, соединенный с блоком управления и синхронизации, падающий груз выполнен в виде жесткой упругой оболочки с противовесом-дебалансом в верхней части, а оболочка заполнена сыпучей массой, при этом отношение акустических жесткостей материалов сыпучей массы и оболочки меньше единицы, причем отношение глубины ее заполнения к высоте груза в 2 раза меньше величины отношения плотностей материалов, их составляющих. Механизм подъема-сбрасывания груза установлен на каретке, опирающейся роликами на направляющие мачты, при этом узел управления размещен на каретке и выполнен в виде пневмоцилиндра, головка груза выполнена конусной, а поверхности сцепления головки и клещевого захвата имеют одинаковую кривизну.
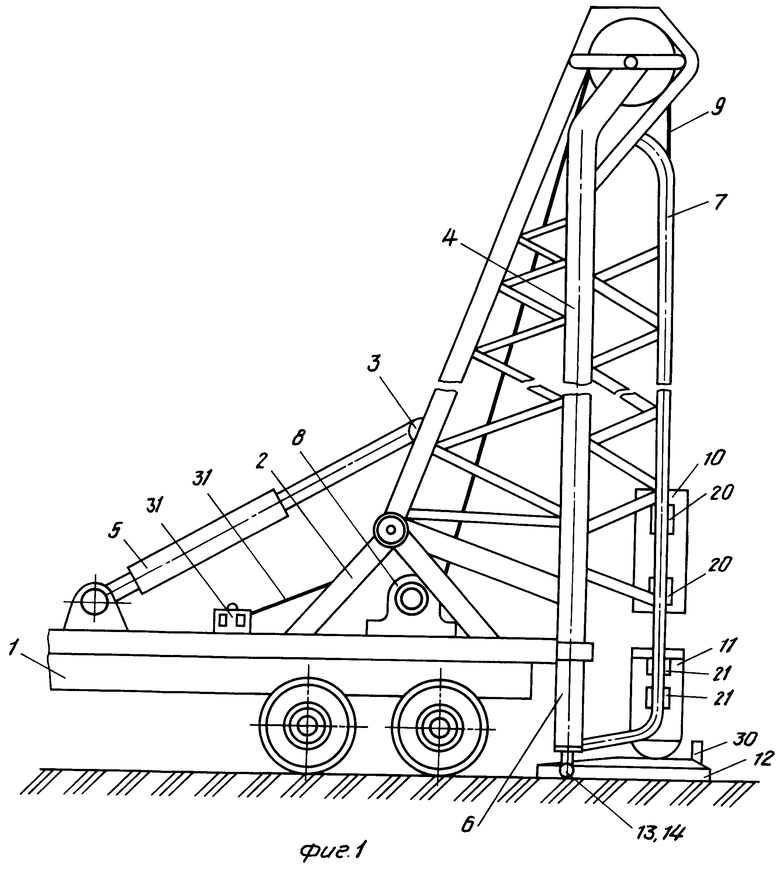
На фиг. 1 изображено устройство для возбуждения сейсмических волн, вид сбоку; на фиг.2 каретка с клещевым захватом; на фиг.3 падающий груз в контакте с рабочей плитой в момент удара, продольный разрез.
Устройство для возбуждения сейсмических волн состоит из транспортного средства 1, несущей рамы 2, шарнира 3, мачты 4, гидродомкрата 5, гидродомкратов 6 мачты, направляющих 7, лебедки 8, троса 9, каретки 10, груза 11, плиты 12, поворотных шарниров 13, 14, клещевого захвата 15, пневмоцилиндра 16, штоков 17, газового ресивера 18, несущего шарнира 19, роликов 20, 21, упругих элементов 22, 23, полости 24, сыпучего материала 25, головки 26, шарнира 27, противовеса 28, проушин 29, датчика 30 удара, блока 31 управления, электропневмоклапана 32.
Устройство для возбуждения сейсмических волн работает следующим образом.
Устройство выводится из транспортного положения, для чего производится переключение передач движителя и освобождение груза 11, плиты 12, мачты 4, каретки 10 от удерживающих хомутов (не показаны). Мачта 4 под действием гидродомкрата 5 приводится в рабочее вертикальное положение, поворачиваясь на шарнире 3 несущей рамы 2, при этом плита 12, подвешенная на поворотных шарнирах 13 и 14 к мачте 4, занимает горизонтальное положение и придавливается к земле при помощи гидродомкратов 6 мачты 4. Затем мачта в вертикальном положении фиксируется хомутами на раме транспортного средства 1.
Каретка 10 на тросе 9, проходящем через систему неподвижных блоков к лебедке 8, опускается к грузу 11 под действием своего веса, плавно раскручивая барабан лебедки. Клещевые захваты 15 входят в соприкосновение с конусной головкой 26 груза 11 и под действием силы веса каретки 10 раздвигаются. При этом каретка продолжает опускаться, скользя вдоль направляющих 7 мачты 4 на роликах 20, которые упругими элементами 22 распираются так, что каретка 10 не может изменить свое положение внутри направляющих 7. Клещевые захваты 15 продолжают раскрываться, поворачиваясь на несущем шарнире 19, до тех пор, пока не выйдут за основание конусной головки 26 и под действием упругих элементов 22 не обхватят головку 26 груза 11. Движение каретки 10 вниз вдоль направляющих 7 мачты 4 прекращается. Барабан лебедки 8 приводится во вращение в обратном направлении, наматывая на себя трос 9. Груз 11, находясь в зацеплении с кареткой 10 при помощи клещевого захвата 15, под действием троса 9 начинает движение вверх вдоль мачты 4. При этом ролики 20 и 21, плотно сидящие на направляющих 7 мачты 4, под действием упругих элементов 23 препятствуют изменению положения груза 11 и каретки 10.
Груз 11 поднимается на заданную высоту, где тормозами лебедки 8 фиксируется. При этом предварительно датчик 30 удара, установленный на плите 2, присоединяется к блоку 31 управления, после чего устройство подготовлено к процессу возбуждения сейсмических волн.
По команде сейсмостанции, поступающей на пульт 31 управления, происходит присоединение электропневмоклана 32 к источнику питания. Электропневмоклапан срабатывает и открывает доступ газу высокого давления из ресивера 18 в пневмоцилиндр 16. Взаимодействуя с пневмопоршнями двустороннего действия, газ высокого давления выталкивает штоки 17 пневмоцилиндра 16, в результате чего рычаги клещевого захвата 15 поворачиваются на шарнире 19, освобождая головку 26 груза 11. Груз начинает свободно скользить вдоль направляющих 7 мачты 4, удерживаемый внутри них упругими элементами 23 через ролики 21.
Взаимодействуя с плитой 12, груз 11 резко тормозится. При этом происходит перераспределение скоростей движения между плитой 12 и грузом 11. Вследствие того, что плита 12 опирается на грунт, груз 11 резко затормозится и по материалу корпуса груза начинает движение волна сжимающих напряжений в направлении, противоположном движению груза, т.е. вертикально вверх (на фиг. 3 это обозначено стрелками), со скоростью звука в материале груза. По истечении времени t1 l/c1, где l высота груза 11; с1 скорость распространения звуковых волн в материале корпуса груза, волна сжимающих напряжений достигает верхней плоскости груза и отражается от нее волной растягивающих напряжений. При этом направление массовой скорости частиц на фронте этой волны не изменяется, а скорость ее распространения совпадает со скоростью звука. Через промежуток времени t2l/c1 эта волна достигает основания груза 11, что ведет к отскакиванию груза от плиты 12. Таким образом, время между ударом груза 11 по плите 12 и отскоком его составляет Т t1 + t2 2 l/c1.
Одновременно с этим внутри полости 24 груза 11 движется сыпучая масса 25, которая характеризуется своей скоростью распространения звука С2. При движении волны сжатия по корпусу груза 11 часть ее переходит и в сыпучую массу 25 с коэффициентом по амплитуде κ, определяемым упругими постоянными материалов корпуса груза 11 и сыпучей массы 25. Его выражение хорошо известно κ  где ρ1,2 плотности материалов груза 11 и сыпучей массы 25; С1,2 скорости распространения звука в них соответственно.
где ρ1,2 плотности материалов груза 11 и сыпучей массы 25; С1,2 скорости распространения звука в них соответственно.
Таким образом, в процессе соударения внутри материала груза 11 образуются три волны, которые за время Т 2l/C1 движутся в противоположные стороны относительно друг друга. Они обладают импульсами, так как в этом движении участвуют массы, составляющие груз 11. Для того, чтобы груз находился в покое после удара о плиту 12, необходимо, чтобы сумма импульсов всех движущихся масс была равна нулю.
При этом груз 11 находится на плите 12 и движется вместе с ней, деформируя нижележащие слои грунта. После передачи первоначального импульса грунта движение плиты 12 и груза 11 прекращается, а в породу вниз уходит волна сжатия, преобразующаяся в дальнейшем в упругую сейсмическую волну.
Удар груза 11 по плите 12 приводит к срабатыванию датчика 30 удара, который посылает импульс электрического тока в блок 31 управления, где происходит формирование отметки момента. Одновременно с этим в блоке управления формируется сигнал, который отключает электропневмоклапан 32 от источника питания. Электропневмоклапан возвращается в свое нейтральное положение и перекрывает доступ газу из ресивера 18 в пневмоцидлиндр 16. Оставшийся газ через проходные отверстия пневмоклапана 32 сбрасывается в атмосферу. Упругий элемент 22 стягивает рычаги клещевого захвата 15, толкая штоки 17 внутрь пневмоцилиндра 16. После выполнения этих операций приводится в действие лебедка 8. Трос 9, сматываясь с барабана лебедки, освобождает каретку 10, которая начинает опускаться, скользя на роликах 20 вдоль направляющих 7 мачты 4. Клещевой захват 15 входит в соприкосновение с головкой 26 груза 11. Головка груза находится строго в вертикальном положении вследствие того, что она соединяется с грузом посредством шарнира 27 и проушин 29. При этом наличие противовеса 28, масса которого значительно больше массы головки 26, обеспечивает поворот головки 26 на шарнире 27 до достижения вертикального положения в поле силы тяжести. Клещевой захват 15, продолжая свое движение вниз, надевается на конусный наконечник головки 26 под действием своего веса, скользя вдоль боковой поверхности головки 26. Рычаги захвата 15 растягивают упругий элемент 22 и частично выводят штоки 17 из пневмоцилиндра 16. Достигая основания конусного наконечника головки 26, клещевой захват 15 под действием упругого элемента 22 захлопывается под этим основанием, плотно прилегая по всей нижней поверхности головки 26, выполненной по дуге окружности с центром на оси шарнира 19. Поверхности клещевого захвата 15, удерживающие головку 26, выполнены по этой же дуге окружности. Такое соединение головки 26 с клещевым захватом 15 существенно уменьшает силу нормального давления головки 26.
После захлопывания клещевого захвата 15 вокруг головки 26 производится намотка троса 9 на барабан лебедки 8. Каретка 10 вместе с грузом 11 начинает движение на роликах 20 и 21 вверх по направляющим 7 мачты 4. Самопроизвольному раскрытию захвата 15 препятствует действие упругого элемента 22 и штоков 17 пневмоцилиндра 16. По достижении заданной высоты подъема движение каретки 10 с грузом 11 прекращается, устройство вновь подготовлено для производства очередного воздействия на поверхность грунта. Дальнейшие операции для сбрасывания груза повторяются, как описано выше.
После завершения работы устройства на одном пикете возбуждения каретка 10 вместе с грузом 11 плавно опускается в нижнее положение, где соответствующими хомутами фиксируется на мачте 4 и площадке для груза 11 (не показаны). Гидродомкратами 6 освобождаются мачта 4 и плита 12, которая приподнимается за одну сторону над поверхностью земли. После этого установка перемещается на новый пикет возбуждения.
Для передвижения установки в конце работы или в процессе проведения сейсмических наблюдений на сильно пересеченной местности после проведения операций закрепления каретки 10 и груза 11 производится опускание мачты 4 гидродомкратом 5 при свободном барабане лебедки 8.
Устройство для возбуждения сейсмических волн обладает целым рядом преимуществ. Во-первых, простота и надежность конструкции базируются на известных решениях буровой техники, которые эксплуатировались в течение многих лет и отработаны. Во-вторых, применение груза, состоящего из двух различных материалов, предотвращает процесс отскока его от платформы. Это позволяет исключить из конструкции сложные и дорогостоящие элементы захвата движущегося вверх груза-бойка. В-третьих, отсутствие в устройстве механизмов и частей, требующих взаимного согласования в процессе работы, обеспечивает простоту обслуживания и высокую надежность работы устройства на профиле практически независимо от климатических условий. Эти преимущества позволяют повысить сейсмическую эффективность возбуждения упругих волн.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ГЕОФИЗИЧЕСКИХ ПРИБОРОВ В НАКЛОННЫЕ И ГОРИЗОНТАЛЬНЫЕ СКВАЖИНЫ | 1998 |
|
RU2210792C2 |
| Источник сейсмических волн для многоволновой сейсморазведки | 1990 |
|
SU1831695A3 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ТИПА ФЛЮИДОНАСЫЩЕНИЯ ГЕОЛОГИЧЕСКОГО РАЗРЕЗА | 1995 |
|
RU2101732C1 |
| Устройство для возбуждения сейсмических колебаний | 1990 |
|
SU1804633A3 |
| ПОДВЕСКА СЕЙСМИЧЕСКОГО ВИБРАТОРА | 1996 |
|
RU2107311C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ФАЗОВЫХ ПРЕВРАЩЕНИЙ | 2002 |
|
RU2229702C2 |
| СКВАЖИННЫЙ ВИБРАТОР С УПРАВЛЕНИЕМ ЧЕРЕЗ КАРОТАЖНЫЙ КАБЕЛЬ | 1996 |
|
RU2112253C1 |
| СКВАЖИННЫЙ СЕЙСМИЧЕСКИЙ ВИБРАТОР | 1996 |
|
RU2107930C1 |
| ИСТОЧНИК СЕЙСМИЧЕСКИХ СИГНАЛОВ УДАРНОГО ТИПА | 2002 |
|
RU2246740C2 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 1991 |
|
RU2040017C1 |


Использование: в геофизических исследованиях для возбуждения упругих волн. Сущность изобретения: устройство содержит вертикальную мачту с направляющими, излучающую плиту, падающий груз с головкой, датчик удара, механизм подъема-сбрасывания груза. Механизм подъема-сбрасывания состоит из клещевого захвата головки груза с размещенным на его рычагах упругим элементом, узлом управления срабатыванием клещевого захвата головки груза с размещенным на его рычагах упругим элементом, узлом управления срабатыванием клещевого захвата, установленным на каретке, опирающейся роликами на направляющие мачты. Узел управления выполнен в виде пневмоцилиндра. Датчик удара соединен с блоком управления и синхронизации. Падающий груз выполнен в виде жесткой упругой оболочки с противовесом-дебалансом. Оболочка заполнена сыпучей массой, акустическая жесткость материала которой меньше акустической жесткости материала оболочки, а отношение глубины заполнения оболочки сыпучей массой к высоте груза в 2 раза меньше величины отношения плотностей материалов, их составляющих. Головка груза выполнена конусной формы, а поверхности сцепления головки и клещевого захвата имеют одинаковую кривизну. 3 з.п. ф-лы, 3 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| КОЛОНКОВЫЙ НАБОР | 2016 |
|
RU2631458C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
