Изобретение относится к транспорту и может быть использовано в тяговых электротрансмиссиях.
Известен тяговый электропривод содержащий генераторы, ключевые элементы, электродвигатели [1]
Его недостатком является отсутствие реализации режима поворота в широком диапазоне скоростей движения.
Известен тяговый электропривод большегрузных самосвалов, содержащий генератор постоянного тока, тяговые электродвигатели, тормозной резистор и ключевые элементы [2]
Недостатком этого электропривода является жесткое параллельное соединение тяговых электродвигателей, что затрудняет реализацию режимов тяги, поворота и торможения.
Целью изобретения является повышение надежности работы электропривода и улучшение качества управления режимами поворота транспортного средства с электроприводом.
Цель достигается тем, что якорные обмотки электродвигателей и первый и третий ключевые элементы соединены в мостовую схему, в одну диагональ которой включена якорная обмотка генератора, а в другую второй ключевой элемент, и, последовательно соединенные тормозной резистор и четвертый ключевой элемент.
Цель достигается также тем, что ключевые элементы выполнены в виде тиристоров и тиристорно-диодных сборок.
Существенной особенностью электропривода постоянного тока является использование мостовой схемы соединения якорных обмоток и ключей. Мостовая схема соединения и схемы силовых ключей обеспечивают оптимизацию режимов работы транспортного средства с электроприводом при тяге, повороте и торможении.
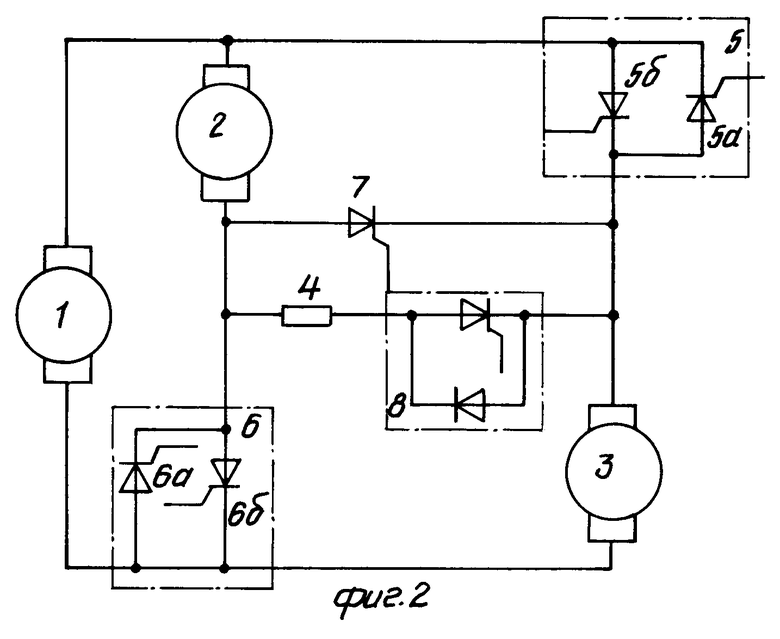
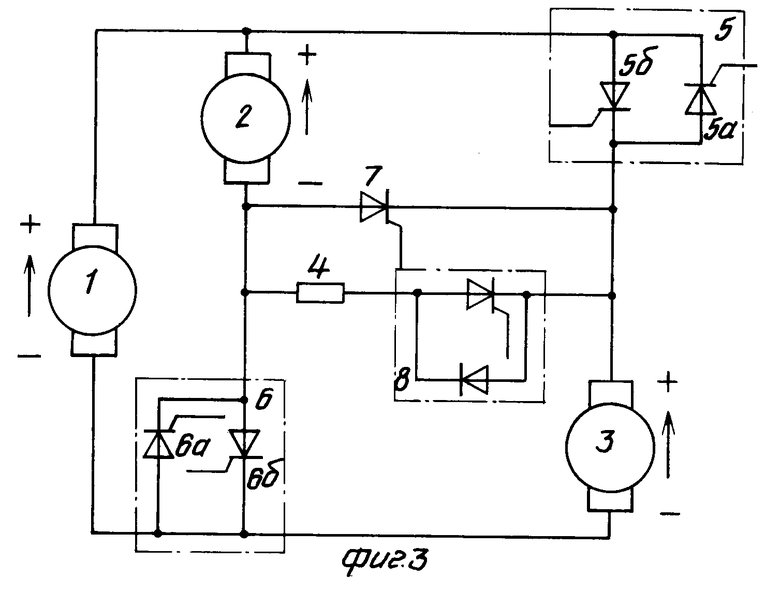
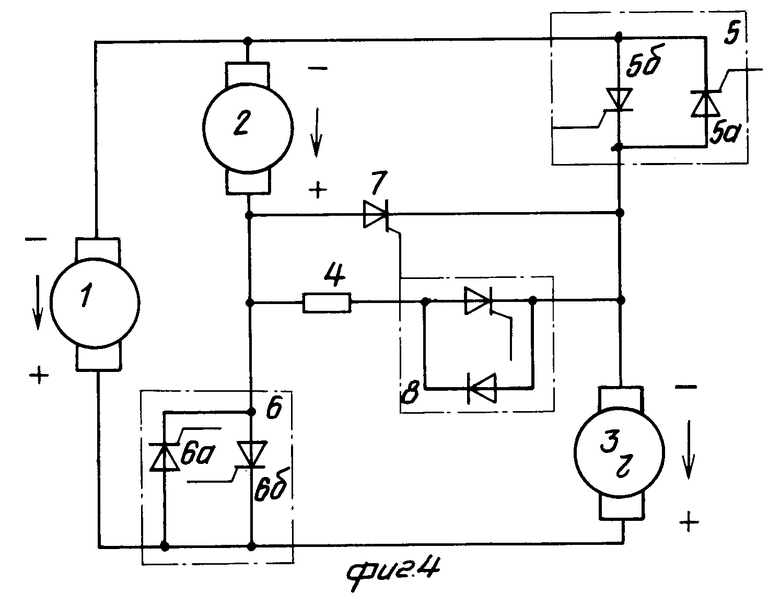
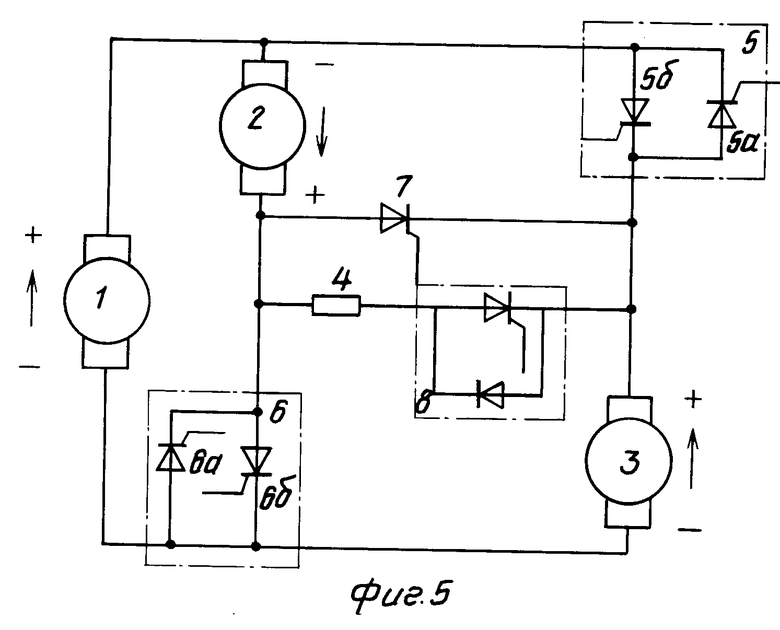
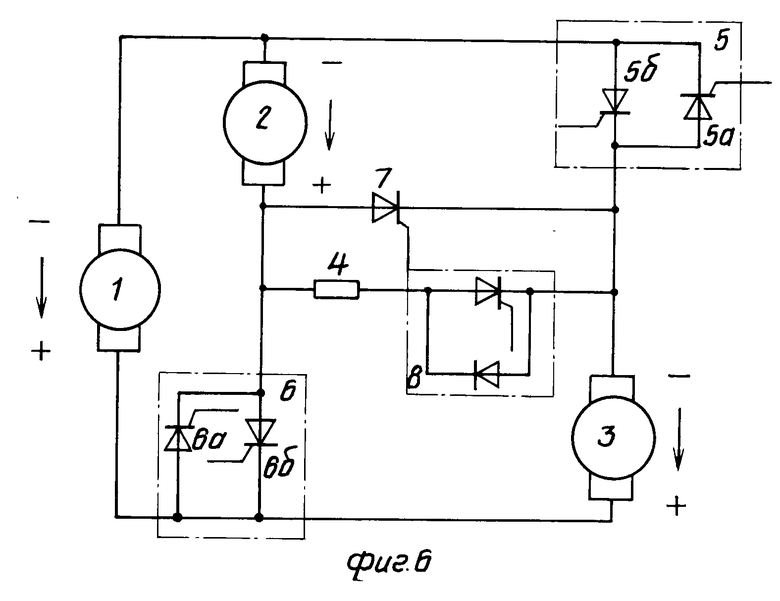
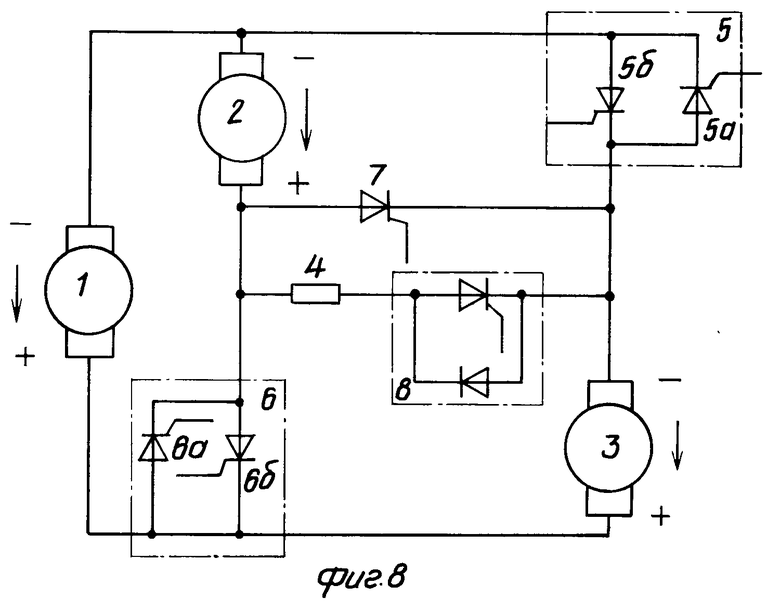
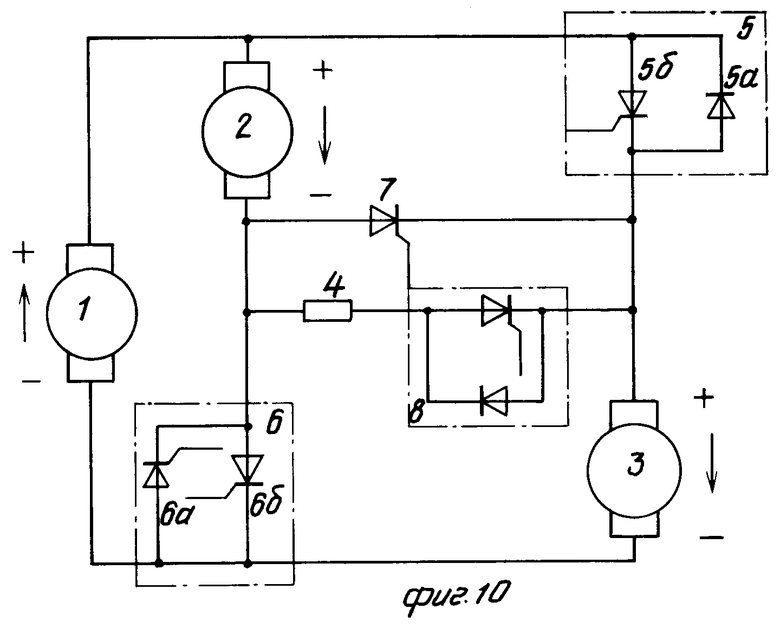
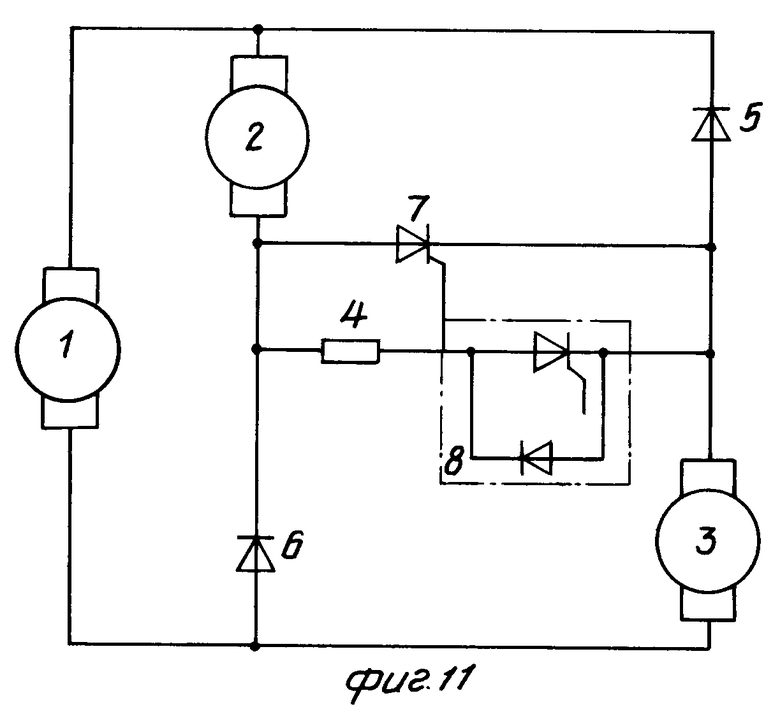
На фиг. 1 представлена функциональная схема электропривода постоянного тока; на фиг.2 принципиальная электрическая схема электропривода постоянного тока; на фиг.3 показан режим прямолинейного движения, последовательное соединение электрических машин; на фиг.4 режим прямолинейного движения, параллельное соединение электрических машин; на фиг.5 режим тяги, поворот при последовательном соединении электрических машин, электродвигатель (отстающего борта) переведен в генераторный режим; на фиг.6 режим тяги, поворот при параллельном соединении электрических машин, электродвигатель (отстающего борта) переведен в генераторный режим; на фиг.7 режим электрического торможения при последовательном соединении электрических машин; на фиг.8 режим электрического торможения при параллельном соединении электрических машин; на фиг.9 режим дотормаживания (при низких скоростях движения) при последовательном (до начала дотормаживания) соединении электрических машин (окончание торможения по схеме фиг.7); на фиг.10 режим дотормаживания при параллельном соединении электрических машин (окончание торможения по схеме фиг.8); на фиг. 11 представлен вариант устройства управления электроприводом для транспортных средств (например, большегрузных самосвалов), не использующих при повороте рекуперацию энергии с отстающего борта на забегающий.
На фигурах проводящий тиристор или диод изображен зачерненным, показаны полярности напряжений электрических машин, стрелками направление их ЭДС.
Особенностью представленных вариантов устройства является отсутствие протекания тока через тормозной резистор 4 в той фазе торможения, когда протекание тормозного тока в электродвигателях 2 и 3 обеспечивается генератором 1, причем вследствие малости ЭДС электродвигателей (при низких частотах вращения, т.е. при малых скоростях движения транспортного средства) они работают в режиме противовключения (фиг.9 и 10).
Электропривод постоянного тока, содержит генератор 1, тяговые электродвигатели 2 и 3, тормозной резистор 4, ключевые элементы 5 и 6 (например, контакторы, тиристоры, тиристорные ключи или комбинации полупроводниковых приборов), обеспечивающие параллельное включение генератора 1 и электродвигателей 2 и 3, ключевой элемент 7 (например, тиристор, контактор и т.д.), обеспечивающий последовательное соединение генератора 1 и электродвигателей 2 и 3, ключевой элемент 8, для подключения тормозного резистора 4, датчик 9 напряжения генератора 1, датчики 10, 11, 12 токов генератора 1, электродвигателей 2 и 3 соответственно, обмотки 13, 14, 15 возбуждения с регуляторами 16, 17, 18 возбуждения генератора 1 и электродвигателей 2 и 3 соответственно, систему автоматического управления (САУ) 19, входы задания которой соединены с выходами комплекта 20 органов управления транспортным средством, а входы обратных связей с датчиками 9, 10, 11, 12 и может быть с датчиками состояния ключевых элементов 5, 6, 7 и 8.
Электропривод постоянного тока работает следующим образом.
В режиме прямолинейного движения исходное соединение генератора 1 и электродвигателей 2 и 3 последовательное, что обеспечивается замыканием ключевого элемента 7 (например, тиристора) и размыканием (или разомкнутым состоянием) ключевых элементов 5 и 6 (например, невключением контактов или тиристоров). При увеличении скорости движения требуемое увеличение напряжения генератора 1 достигается увеличением значения уставки регулятора 16 возбуждения генератора 1. По достижении напряжением генератора 1 максимального значения и при необходимости дальнейшего увеличения скорости движения САУ 19 в 2 раза уменьшает уставку тока возбуждения генератора 1, обеспечивая при этом условия для выключения ключевого элемента 7 (например, снижая кратковременно напряжение генератора до величины, при которой обеспечивается запирание тиристора 7, если ключевой элемент 7 тиристор), контролирует факт размыкания (выключения) ключевого элемента 7 по сигналу датчика с блок-контакта, если ключевой элемент контактор, по сигналу датчика состояния тиристора или по сигналу об окончании программно задаваемой паузы на отключение тиристора, если ключевой элемент 7 тиристор или тиристорный ключ. После выключения ключевого элемента 7 САУ 19 изменяет знаки уставок возбуждения генератора 1 и электродвигателей 2 и 3. Таким образом, дальнейшее увеличение скорости движения происходит при параллельном соединении генератора 1 и электродвигателей 2 и 3, причем ЭДС всех трех электрических машин 1, 2, 3 обратны по знаку их ЭДС при последовательном соединении. Обратный переход от параллельного соединения электрических машин 1, 2, 3 к их последовательному соединению (в режиме прямолинейного движения), требуемый, например, по условиям движения, происходит следующим образом.
САУ 19 контролирует значения токов электрических машин 1, 2, 3 и напряжения генератора 1. Когда напряжение генератора 1 ниже половины максимального значения, САУ 19 запоминает значения уставок регуляторов 16, 17 и 18 токов возбуждения электрических машин 1, 2, 3, затем делает их равными нулю, дает сигнал на размыкание ключевых элементов 5 и 6 и замыкание ключевого элемента 7 и по окончании срабатывания ключевых элементов 5, 6 и 7 САУ 19 делает уставки токов возбуждения электрических машин 1, 2 и 3 равными их запомненным значениям, но с обратным знаком. Таким образом, ЭДС электрических машин 1, 2 и 3 при последовательном соединении обратны по знаку их ЭДС при параллельном соединении.
В режиме поворота при последовательном соединении электрических машин 1, 2 и 3 уменьшают ток возбуждения (САУ 19 уменьшает уставку регулятора 17 или 18 возбуждения) электродвигателя (2 или 3) того борта транспортного средства, в сторону которого происходит поворот, при этом при малых радиусах поворота используется изменение знака уставки тока возбуждения электродвигателя отстающего борта транспортного средства, т. е. изменение знака ЭДС электродвигателя отстающего борта (перевод электродвигателя в генераторный режим).
В режиме поворота при параллельном соединении электрических машин 1, 2, 3, когда скорость движения более трети от максимального значения, поворот осуществляют при параллельном соединении электрических машин 1, 2, 3. При этом САУ увеличивает уставку тока возбуждения (переводит электродвигатель в генераторный режим) электродвигателя того борта, в сторону которого осуществляется поворот (электродвигатель отстающего борта транспортного средства).
В режиме поворота при параллельном соединении электрических машин 1, 2 и 3, когда скорость движения менее трети от максимального значения, сначала САУ 19 производит действия по переходу к последовательному соединению электрических машин 1, 2, 3, и поворот осуществляется при последовательном соединении машин 1, 2 и 3 (как описано выше).
При изменении режима движения от тяги к электрическому торможению, когда электрические машины 1, 2 и 3 соединены последовательно, САУ 19 уменьшает уставку регулятора 16 тока возбуждения генератора 1 и контролирует при помощи датчика 10 тока генератора 1, одновременно замыкая ключевой элемент 8, по достижении током генератора нулевого значения размыкает ключевой элемент 7 (если он тиристор, как на фиг.1, то он выключается автоматически), вводя в силовую цепь тормозной резистор 4, затем САУ 19 обеспечивает выполнение условий торможения, задаваемых комплектом 20 органов управления, увеличивая напряжение генератора 1 (используя также при необходимости реверсирование напряжения генератора).
При изменении режима движения от тяги к электрическому торможению, когда электрические машины 1, 2 и 3 соединены параллельно, САУ 19 уменьшает возбуждение генератора 1, контролируя токи электродвигателей 2 и 3 датчиками 11 и 12, настолько, чтобы токи электродвигателей изменили направление и достигли заданного значения, определяемого комплектом 20 органов управления, замыкает ключевой элемент 8, вводя тормозной резистор 4, увеличивает токи возбуждения электродвигателей 2 и 3 в соответствии с условиями торможения вплоть до их максимальных значений, затем при необходимости изменяет знаки напряжений электродвигателей 2 и 3, приводит в действие ключевой элемент 8, отключая тормозной резистор 4.
На фиг. 2 ключевые элементы 5 и 6 выполнены в виде встречно-параллельно подключенных тиристоров, ключевой элемент 7 тиристор, ключевой элемент 8 тиристор с встречно-параллельно подключенным диодом. Тиристоры 5а и 6а необходимы для реализации параллельного подключения электрических машин 1, 2 и 3, тиристоры 5б и 6б используются при повороте транспортного средства с использованием рекуперации энергии торможения с отстающего борта на забегающий для перевода соответственно электродвигателя 3 или 2 в генераторный режим.
Таким образом, электропривод постоянного тока обеспечивает реализацию режима тяги, при котором различают режим прямолинейного движения и режим поворота, и режим электрического торможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2130229C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2025034C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2006389C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2020676C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1998 |
|
RU2129495C1 |
| АВТОНОМНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1993 |
|
RU2053143C1 |
| ЭЛЕКТРОПРИВОД ЦЕНТРИФУГИ БЫТОВОЙ СТИРАЛЬНОЙ МАШИНЫ | 1992 |
|
RU2050685C1 |
| Тяговый электропривод автономного транспортного средства | 1987 |
|
SU1495158A1 |
| Тяговый электропривод автономного транспортного средства | 1980 |
|
SU1125144A1 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |



Использование: в тяговых электротрансмиссиях. Сущность: электропривод постоянного тока содержит генератор, два электродвигателя, тормозной резистор и четыре ключевых элемента. Якорные обмотки электродвигателей и первый и третий ключевые элементы соединены в мостовую схему, в одну диагональ которой включена якорная обмотка генератора, а в другую второй ключевой элемент и последовательно соединенные тормозной резистор и четвертый ключевой элемент. Такое соединение позволяет оптимизировать режимы работы транспортного средства с электроприводом при тяге, повороте и торможении. 1 з.п. ф-лы, 11 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Теория и расчет тягового привода электромобиля | |||
| /Под ред | |||
| И.С | |||
| Ефремова | |||
| М.: Высшая школа, 1984, с.335, рис.9.9. | |||
