Изобретение относится к авиационной технике и может быть использовано при измерении высоты полета самолета, в том числе на малых высотах, когда высота полета меньше размаха крыла.
Известна система воздушных сигналов СВС-2Ц-2 [1]
Определение высоты полета в системе воздушных сигналов производится по измеренным значениям полного и статистического давлений вблизи самолета с последующей их математической обработкой, учитывающей аэродинамические поправки на возмущения поля давлений, вносимые движением самолета, инструментальные поправки приемников давлений.
Недостатком являются погрешности, обусловленные аномалиями барического поля атмосферы, ошибками введения барической высоты пролетаемой местности, на малых высотах полета влиянием экрана на поля давлений вблизи самолета. Погрешность определения высоты в СВС-2Ц-2 составляет не менее 5-6 м.
Наиболее близким к предлагаемому является барометрический способ определения высоты полета самолета путем учета статического давления вблизи самолета и параметров состояния атмосферы у земли (давление и плотность воздуха). По лабораторным тарирочным кривым определяются инструментальные поправки и находятся исправленные показания приборов высоты (Нпр.исп.). В случае применения приборов самописцев снимаются ординаты кривой записи и по лабораторным тарировочным кривым непосредственно определяется высота (Нδ ). Вносятся аэродинамические поправки (δНа) по тарировочным графикам δНа f(Vпр, Н) и получают барометрическую высоту Нδ Нпр.исп. + δНа [2]
Недостатком данного способа является то, что при полете с дозвуковой скоростью перед фюзеляжем, крылом и другими частями самолета образуется зона повышенного давления. Эта зона настолько велика, что вынести на штанге ПВД (приемник воздушного давления) за ее пределы практически не удается. Поэтому в статическую камеру ПВД подается местное статическое давление, большее по величине, чем атмосферное статическое давление воздуха.
При полетах самолета на высотах, меньших размаха крыла, значительные погрешности определения барометрической высоты вносит аэродинамическое влияние экрана (водной или земной поверхности) на поле скоростей и давлений вблизи самолета.
Погрешности лучших образцов баровысотомеров составляют приблизительно 6-10 мм вод.ст.
Цель изобретения увеличение точности определения малых высот полета летательного аппарата.
Для этого в способе определения высоты полета летательного аппарата, заключающемся в измерении параметров потока вблизи летательного аппарата и дальнейшей их математической обработке, дополнительно формируют параметр (А), изменяющийся при аэродинамическом воздействии экрана, определяют параметры потока (В), параметры движения и конфигурации летательного аппарата (С), высоту полета определяют из тарировочной зависимости h h (A, В, С), при этом соотношение между параметрами А, В, С и h определяют в летном эксперименте.
Кроме того, параметр (А) могут формировать в виде функции параметров углов скоса потока ε, А f(ε ).
Параметр (А) также могут определять в виде функции параметров потока и параметров полета
A  где G вес ЛА;
где G вес ЛА;
ny вертикальная перегрузка;
q скоростной напор.
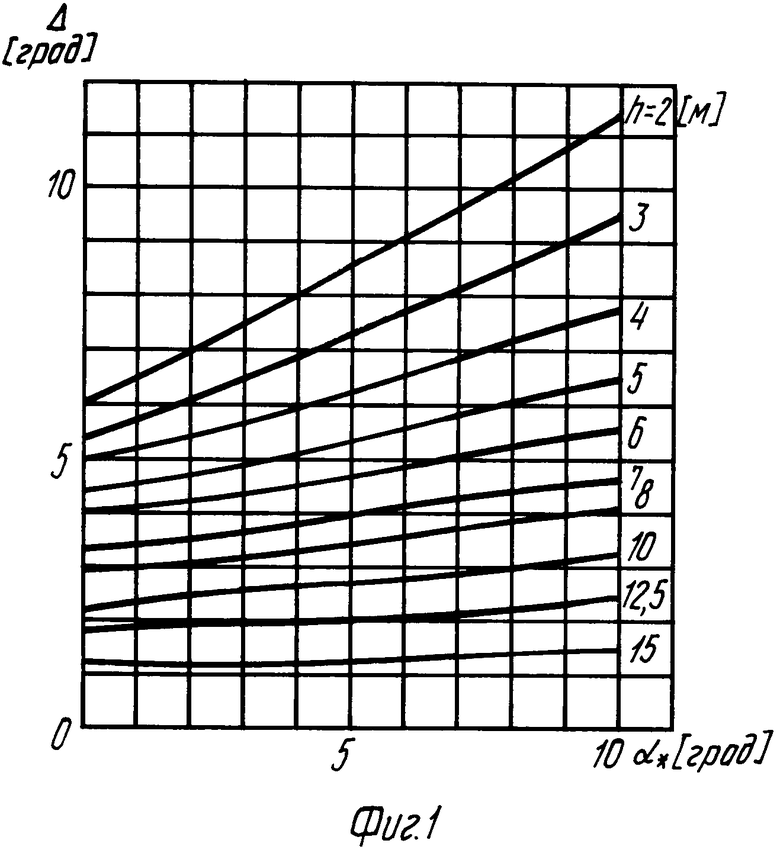
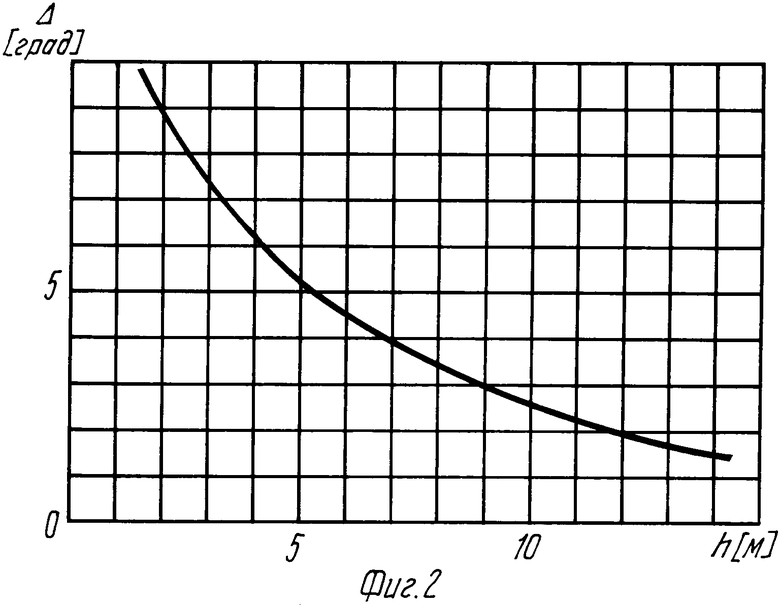
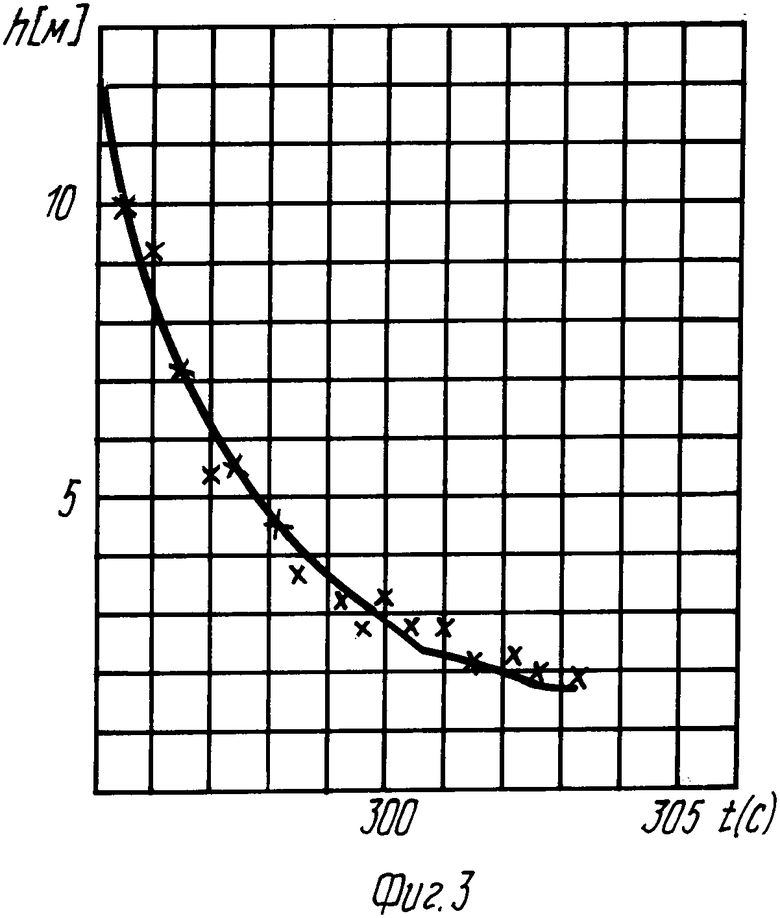
На фиг. 1 показан график функции Δ определяющей приращение параметра А при воздействии экрана при фиксированных значениях высоты h; на фиг.2 график функции f ( Δ); на фиг.3 пример определения высоты h по тарировочной зависимости на режиме посадки самолета, где точками обозначены рассчитанные h, сплошной линией текущее значение высоты в зависимости от времени по данным внешнетраекторных измерений.
В предлагаемом способе для определения высоты полета формируют параметр А, изменяющийся при аэродинамическом воздействии экрана, определяют параметры потока В: α, V, где α угол атаки; V скорость потока, параметры движения и конфигурации ЛА С: ωt,δi; i 1-n, где ωt угловая скорость тангажа; δi угол отклонения закрылков и органов управления (элеронов, интерцепторов и т.д.). Высота полета определяется из тарировочной зависимости h h (А, В, С). При этом соотношение между параметрами А, В, С и h, имеющими однозначное решение относительно высоты h, определяют в летном эксперименте.
Таким образом удается избежать погрешности определения высоты полета, вызванные зонами повышенного давления перед самолетом, аномалиями барического поля атмосферы, а также аэродинамическим влиянием экрана (водной или земной поверхности) на поле скоростей и давлений вблизи самолета.
Формирование параметра А возможно путем учета:
углов скоса потока (ε ) вблизи ЛА, Аf(ε ) в области их сильного изменения под влиянием экрана, например, на нижней поверхности концевых частей крыла или на боковой поверхности фюзеляжа в следе за крылом ЛА;
местных давлений Р1А f(P);
местных скоростей;
параметров потока и параметров полета, например,
A  где G вес ЛА;
где G вес ЛА;
ny вертикальная перегрузка;
q скоростной напор.
В данном случае параметр А выражает коэффициент подъемной силы ЛА, изменяющийся под воздействием экрана.
В качестве параметров потока В могут выступать местные углы атаки, углы скосов потока, например на верхней поверхности крыла, и другие параметры, обеспечивающие однозначное решение.
Фиг. 1-3 поясняют предлагаемого способа на основании результатов летного эксперимента на летающей лаборатории ТУ-134А. В качестве параметров потока, движения и конфигурации самолета были приняты:
аэродинамические углы скоса потока β1 и β 2 и в горизонтальной плоскости на нижней поверхности концевых обтекателей крыла;
метный угол атаки α и скорость потока V;
угловая скорость тангажа ωt;
угол отклонения закрылков δз
Для измерения углов скоса использовались датчики ДАУ-12, а для местных углов атаки и скорости потока ДУАС-61-11.
Геометрическая высота определялась средствами внешнетраекторных измерений.
Функциональная зависимость аэродинамического параметра А β 1+ β2 для посадочной конфигурации самолета с параметрами потока α V, движения ωz в данном случае:
A  (h,α +
(h,α +  + 3,6
+ 3,6 +
+  +K; (1) где К постоянный коэффициент.
+K; (1) где К постоянный коэффициент.
Функция Δ при фиксированных h представлена на фиг.1, где α +  Соотношение (1) имеет однозначное решение относительно h в виде:
Соотношение (1) имеет однозначное решение относительно h в виде:
h f(Δ)-0,3 +
+  5
5 (2) где Δ A-3,6
(2) где Δ A-3,6 +
+  -3, функция f(Δ ) представлена на фиг.2.
-3, функция f(Δ ) представлена на фиг.2.
Пример определения высоты h по тарировочной зависимости (2) показан на фиг.3.
Изобретение позволяет повысить точность определения малых высот полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ-АМФИБИЯ | 1997 |
|
RU2135394C1 |
| ПРОТИВОПОЖАРНЫЙ ГИДРОСАМОЛЕТ | 1991 |
|
RU2028253C1 |
| ГИДРОСАМОЛЕТ | 1993 |
|
RU2104224C1 |
| СИСТЕМА ДРЕНАЖА ТОПЛИВНЫХ БАКОВ ГИДРОСАМОЛЕТА | 1992 |
|
RU2054361C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ | 1993 |
|
RU2091274C1 |
| Аэродинамический элемент летательного аппарата | 1991 |
|
SU1782220A3 |
| САМОЛЕТ-АМФИБИЯ (СА) | 1997 |
|
RU2136544C1 |
| ГИДРОСАМОЛЕТ | 2001 |
|
RU2223200C2 |
| ЕМКОСТНЫЙ ДАТЧИК СВЕРХМАЛЫХ ВЫСОТ ПОЛЕТА ГИДРОСАМОЛЕТА | 2001 |
|
RU2196077C2 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА, ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 1999 |
|
RU2183010C2 |
Изобретение относится к авиационной технике и может быть использовано при измерении высоты полета самолета, в том числе на малых высотах, когда высота полета меньше размаха крыла. Согласно способу, измеряют параметры потока вблизи летательного аппарата, формируют аэродинамический параметр, изменяющийся при воздействии экрана. Определяют параметры потока, движение и кофигурации ЛА. Высота полета определяется из тарировочной зависимости от указанных параметров, формируемой в летном эксперименте. 2 з.п. ф-лы, 3 ил.
3. Способ по п. 1, отличающийся тем, что параметр A определяют в виде функции параметров потока и параметров полета  где G вес летательного аппарата, nу вертикальная перегрузка, q скоростной напор.
где G вес летательного аппарата, nу вертикальная перегрузка, q скоростной напор.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Котик М.Г | |||
| и др | |||
| Летные испытания самолетов | |||
| М., 1968, с.32-49. | |||
