Изобретение относится к области авиационного приборостроения и может быть использовано для создания систем автоматизированного управления параметрами полета, зависящими от его текущей высоты и параметров морского волнения, в частности для автоматизации посадки (приводнения) гидросамолета на гладкую и на взволнованную поверхность.
Существуют различные способы определения высоты полета самолета (гидросамолета), например, барометрический, и способы определения высоты полета с помощью изотопных и лазерных высотомеров. Известен барометрический способ определения высоты полета самолета путем учета статического давления вблизи самолета и параметров состояния атмосферы у земли (давление и плотность воздуха) (см. "Летные испытания самолетов" М.Г.Котик и др., Машиностроение, 1968 г.). Недостатком данного способа является то, что при полете с дозвуковой скоростью перед фюзеляжем, крылом и другими частями самолета (гидросамолета) образуется зона повышенного давления. Эта зона настолько велика, что вынести на штанге ПВД (приемник воздушного давления) за ее пределы практически не удается. Поэтому в статическую камеру ПВД подается местное статическое давление, большее по величине, чем атмосферное статическое давление воздуха. При полете самолета на высотах, меньших размаха крыла, значительные погрешности в определении барометрической высоты вносит аэродинамическое влияние экрана (водной или земной поверхности) на поле скоростей и давлений вблизи самолета. Для точного измерения малых высот полета используют изотопные высотомеры. Для этого вдоль ВПП (взлетно-посадочной полосы) располагают датчики, содержащие радиоактивный элемент, а на самолете устанавливают оборудование, позволяющее определять точную высоту нахождения летательного аппарата над ВПП но интенсивности излучения. Однако с помощью таких высотомеров не решают задачу определения высоты полета гидросамолета при посадке на неподготовленную водную акваторию.
Наиболее близким к заявляемому является известный и широко применяемый радиолокационный способ измерения высоты полета, основанный на регистрации полей излучения (полей дальней зоны), создаваемых и принимаемых антенной, установленной на самолете (гидросамолете). К классу устройств, использующих данный принцип, относятся радиовысотомеры (см. "Летная эксплуатация радионавигационного оборудования самолетов", И.Е.Бондарчук, Транспорт, 1978 г. стр. 112-152). Особенность этого способа заключается в том, что возникает рост погрешности измерений с уменьшением высоты полета. Уменьшение погрешности достигается путем значительного усложнения аппаратуры.
Аналогами способа измерения параметров морского волнения могут служить контактные методы измерения, которые используются, например, в п. N 1584513. Однако измерение в этом случае может быть произведено при нахождении гидросамолета на плаву, т.е. уже после посадки на воду.
Наиболее близкими к заявляемому способу измерения параметров морского волнения могут быть радиолокационные методы зондирования морской поверхности (см. "Радиолокация морской поверхности", А.А.Гарнакерьян, А.С.Сосунов, Изд. Ростовского университета, 1978 г. ). На основе этих методов создано устройство a.c. 805745, G 01 C 13/00 "Устройство для измерения параметров морских волн". Однако это устройство позволяет получить характеристики волнения при полете самолета на большой высоте. В заявляемом способе для устранения такого недостатка предлагается использовать поля ближней зоны, создаваемые антенной. Эти поля имеют квазистатический характер, значит для описания свойств антенны, обусловленных ими, допустимо использовать язык и понятия теории электрических цепей. Поля ближней зоны возрастают гораздо быстрее полей дальней зоны при уменьшении расстояния до своего источника (до антенны). Это и дает основание полагать, что погрешность измерений будет уменьшаться при снижении высоты полета. При удалении же от своего источника поля ближней зоны убывают гораздо быстрее полей дальней зоны, поэтому способ измерения высоты полета и параметров морского волнения, основанный на регистрации полей ближней зоны, может использоваться, в отличие от радиолокационных измерителей, только на очень малых высотах полета: меньше размаха крыла гидросамолета.
Задачей предлагаемого изобретения является повышение безопасности посадки самолета, преимущественно гидросамолета, за счет автоматического выдерживания заданной для данного типа летательного аппарата вертикальной скорости.
Поставленная задача достигается тем, что в способе измерения сверхмалой высоты полета самолета, преимущественно гидросамолета, и параметров морского волнения, основанном на регистрации физических величин, зависящих от электромагнитного поля, создаваемого установленной на самолете антенной, создается последовательный LC-контур с образованным в поле ближней зоны антенны конденсатором, одной из обкладок которого является антенна, а другой - корпус самолета, включают данный LC-контур в одно из плеч мостовой схемы, подается на вход мостовой схемы стабилизированное по амплитуде и частоте гармоническое напряжение и судят о высоте полета самолета над водным зеркалом по амплитуде снимаемого с мостовой схемы гармонического сигнала, а при взволнованной водной поверхности снимаемый с мостовой схемы сигнал детектируют, выделяют из продетектированного сигнала и измеряют постоянную и переменную составляющие, при этом о высоте полета самолета судят по постоянной составляющей, о высоте морской волны по амплитуде низкочастотной переменной составляющей, а о длине морской волны в направлении полета и в месте, над которым пролетает самолет, - по частному oт деления горизонтальной скорости самолета на частоту низкочастотной переменной составляющей. При этом индуктивность последовательного LC-контура выбирают из условия попадания резонансной частоты LC-контура при высоте полета самолета выше 50-100 м в диапазон 1,5-6 МГц.
Величина емкости С зависит от высоты полета. При очень большой высоте полета она равна С0, где С0 - емкость LC-контура на большой высоте, при этом резонансная частота LC0-контура равна f0. С понижением высоты полета величина емкости С возрастает и становится равной: C = C0+ΔC, где ΔC - добавочная емкость - возрастает с уменьшением высоты и стремится к нулю при неограниченном возрастании высоты полета.
Таким образом, δf - уход резонансной частоты LC-контура при снижении высоты полета самолета (гидросамолета) имеет вид:
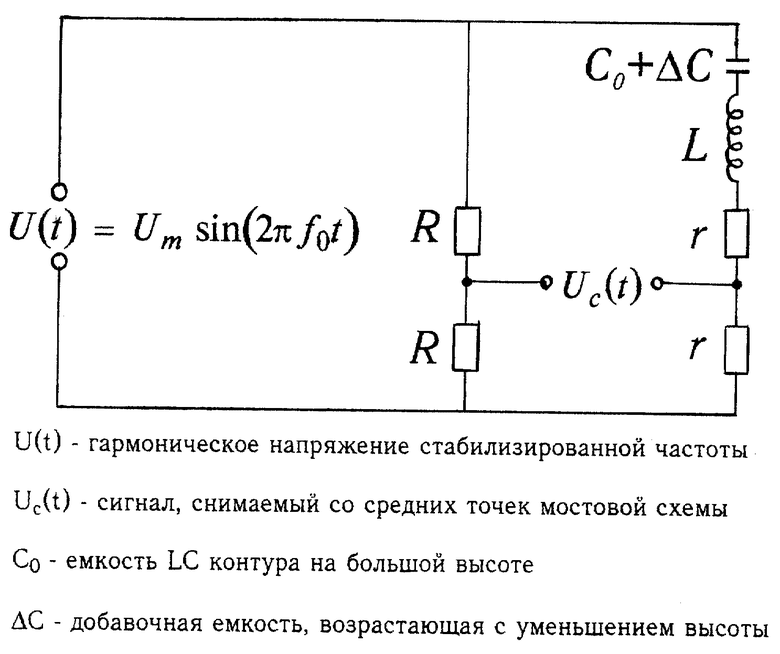
т. е. он резко возрастает при снижении высоты полета. Однако в очень большом диапазоне изменения емкости ΔCδf - уход резонансной частоты - практически пропорционален амплитуде гармонического сигнала Uc(t), где Uc(t) - сигнал, снимаемый со средних точек мостовой схемы, изображенной на чертеже, на вход которой подается гармоническое напряжение U(t) стабилизированной частоты f0 и амплитуды Um. При этом сопротивление r в нижней части мостовой схемы, содержащей последовательный резонансный L(C0+ΔC) - контур, равно:
где: Q - добротность контура, совпадающая с добротностью индуктивной катушки;
L - индуктивность.
На схеме L и (C0+ΔC) - идеальные (т.е. без потерь) индуктивность и емкость, а сопротивление r в верхней части плеча мостовой схемы, содержащей резонансный последовательный L(C0+ΔC)-контур, есть эквивалентное активное сопротивление реальной катушки индуктивности, вычисляемое через ее индуктивность L и добротность Q по вышеуказанной формуле. Если полет происходит над взволнованной морской поверхностью, сигнал Uc(t) (см. чертеж) необходимо дополнительно подвергнуть детектированию с последующим выделением постоянной и переменной (низкочастотной) составляющих, т.к. при строго горизонтальном полете величина добавочной емкости ΔC периодически меняется, достигая максимального значения над гребнем морской волны и минимального - над впадиной, и сигнал Uc(t) можно считать амплитудно-модулированным радиотехническим сигналом. При его детектировании амплитуда постоянной составляющей будет пропорциональна средней высоте полета над взволнованной морской поверхностью, амплитуда переменной (низкочастотной) составляющей - высоте морской волны с коэффициентом пропорциональности, зависящем от средней высоты полета, а частота низкочастотной переменной составляющей (т.е. частота огибающей сигнала) позволит найти длину морской волны в направлении полета путем деления известной горизонтальной скорости самолета на значение этой частоты. Таким образом, в силу того, что на очень малых высотах полета горизонтальная скорость самолета гораздо больше его вертикальной скорости, можно непрерывно следить за высотой полета и параметрами морского волнения в месте, над которым самолет в данный момент находится.
Заявляемый способ позволяет измерять параметры морских волн непосредственно перед посадкой гидросамолета на воду. Кроме того, этот способ позволит объединить в одном устройстве, как высотомер сверхмалых высот, так и измеритель параметров морского волнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕМКОСТНЫЙ ДАТЧИК СВЕРХМАЛЫХ ВЫСОТ ПОЛЕТА ГИДРОСАМОЛЕТА | 2001 |
|
RU2196077C2 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА САМОЛЕТА-АМФИБИИ ПРИ ДВИЖЕНИИ ПО ВОДЕ В РЕЖИМЕ ГЛИССИРОВАНИЯ | 2004 |
|
RU2268157C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| ОТСЕК КАБИНЫ ЛЕТАТЕЛЬНОГО АППАРАТА СО СБОРНО-РАЗБОРНЫМ ТРАПОМ-НАСТИЛОМ | 1999 |
|
RU2160210C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВЫХОДА УГЛА ТАНГАЖА САМОЛЕТА ЗА ПРЕДЕЛЫ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА | 2011 |
|
RU2490168C1 |
| САМОЛЕТ-АМФИБИЯ (СА) | 2000 |
|
RU2171208C1 |
| СИСТЕМА ПЕРЕМЕЩЕНИЯ БОРТОВОГО ПЛАВСРЕДСТВА ГИДРОСАМОЛЕТА | 2005 |
|
RU2287453C1 |
| СПОСОБ СНИЖЕНИЯ ВИБРАЦИОННОГО ВОЗДЕЙСТВИЯ СИЛОВОЙ УСТАНОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2574498C2 |
| ОТСЕК ФЮЗЕЛЯЖА ЛЕТАТЕЛЬНОГО АППАРАТА С ПИЛОНАМИ ВНЕШНЕЙ ПОДВЕСКИ | 1999 |
|
RU2176970C2 |
Изобретение относится к авиационному приборостроению и предназначено для использования при создании систем автоматизированного управления параметрами полета, зависящими от его текущей высоты и параметров морского волнения, в частности для автоматической посадки (приводнения) гидросамолета на гладкую и на взволнованную поверхности. Новым в способе является то, что регистрируют поля ближней зоны антенны путем фиксации ухода δf резонансной частоты fo, например, последовательного LC-контура и измеряют его с помощью мостовой схемы. При взволнованной водной поверхности снимаемый гармонический сигнал подвергают детектированию, затем из продетектированного сигнала выделяют и измеряют постоянную и переменную составляющие. Данное изобретение позволяет объединить в одном устройстве высотомер сверхмалых высот и измеритель параметров морского волнения и решить задачу определения высоты полета гидросамолета при посадке на неподготовленную водную акваторию. 1 з.п. ф-лы, 1 ил.
| Бондарчук И.Е | |||
| и др | |||
| Летная эксплуатация радионавигационного оборудования самолетов | |||
| - М.: Транспорт, 1978, с.112-152 | |||
| Устройство для измерения параметров волнения | 1981 |
|
SU1052869A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2104563C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1992 |
|
RU2046287C1 |
