Изобретение относится к медицинской технике, предназначено для проведения сегментарного массажа с дозируемой линейной нагрузкой глубоко расположенных паравертебральных мышц спины и может найти широкое применение в лечебных медицинских учреждениях, в спорткомплексах, а также в быту, с целью лечения и профилактики различных заболеваний позвоночника, таких как шейно-грудной, грудной и поясничный остеохондрозы, радикулиты, люмбаго, астеноневратический синдром, милалгический синдром, заболевания сердечно-сосудитой системы, бронхо-легочной системы (при хронической пневмонии, бронхиальной астме), при заболеваниях желудочно-кишечного тракта (колиты и т.д.), а также мочеполовой системы и других заболеваний инварционно связанных с тем или иным сегментом позвоночника.
Известен агрегат, предназначенный для лечебного массажа и содержащий раму с роликами, расположенными под углом и упор. Недостатком массажера сложность, низкая эффективность воздействия, а также условие самостоятельного обеспечения пациентом, спортсменом воздействия.
Известен также массажер, содержащий ролики, установленные на стержне с возможностью качения, узел для установки и фиксации, груз и ручку. Недостатком известного устройства является невозможность воздействия на глубоко лежащие ткани.
Целью изобретения является повышение эффективности воздействия на глубоко лежащий паравертебральные мышцы.
Указанная цель достигается тем, что роликовый массажер, содержащий стержень, на котором установлены симметрично и с возможностью вращения пара съемных роликов, грузы для дозированного нагружения, ручку для перемещения и вспомогательную ручку, снабжен узлом для установки и фиксации грузов для дозированного нагружения над роликами по вертикали, а рабочая часть ручки для перемещения ориентирована под прямым углом к вертикали и расположена по высоте преимущественно в зоне центральной части роликов.
Кроме того:
узел для установки и фиксации грузов для дозированного нагружения содержит вертикально ориентируемую штангу, укрепляемую на средней части стержня и имеющую опорную площадку для установки грузов, выполненных в виде дисков различной массы с центральным отверстием, при этом вспомогательная ручка выполнена быстросъемной и расположена на конце штанги;
основание ручки для перемещения зафиксировано непосредственно на стержне, в его средней части;
ролики выполнены разной толщины;
ролики меньшей толщины установлены с наклоном к оси стержня;
ролики меньшей толщины каждой из пар ориентированы под углом один по отношению к другому и зафиксированы между собой;
на поверхности роликов выполнены прессурные элементы;
прессурные элементы выполнены в виде полусфер;
на поверхности роликов выполнены вакуумные присоски.
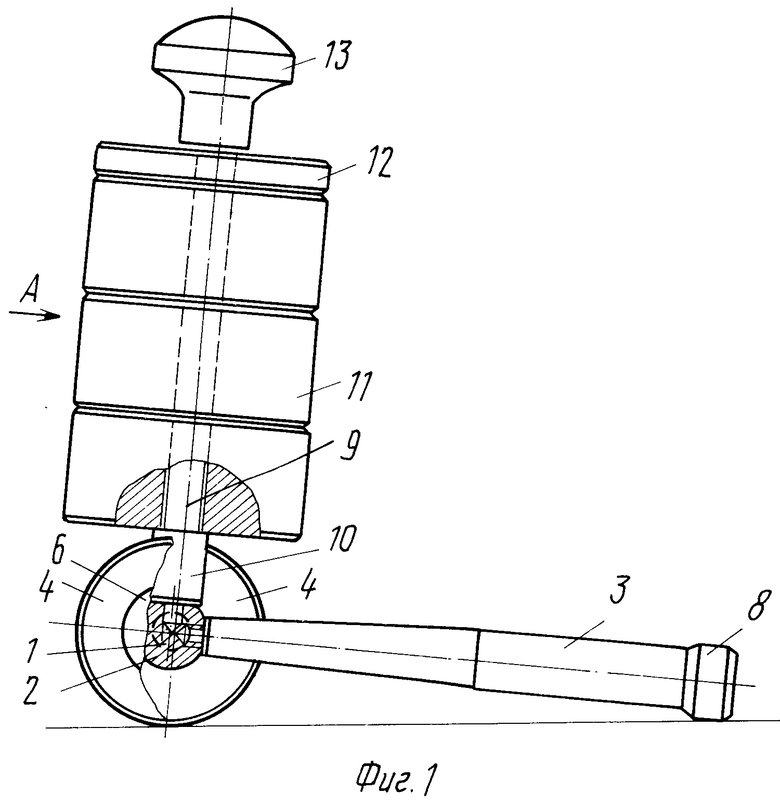
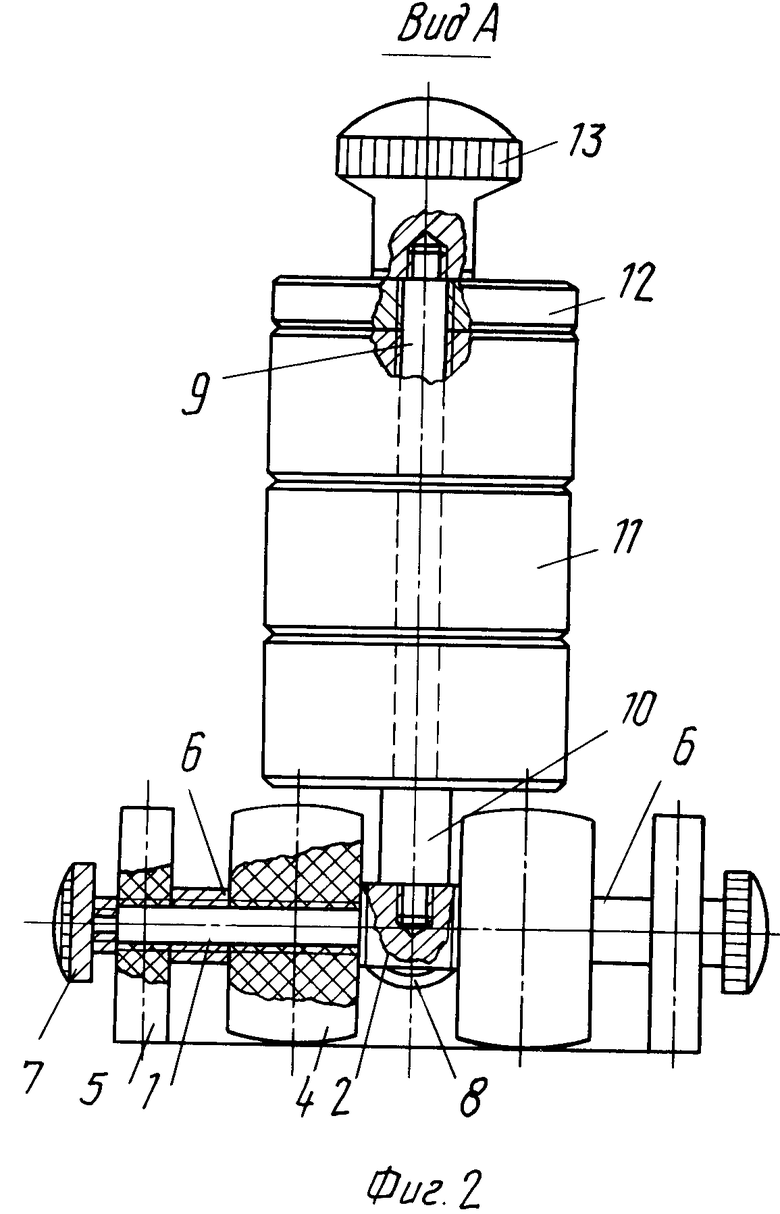
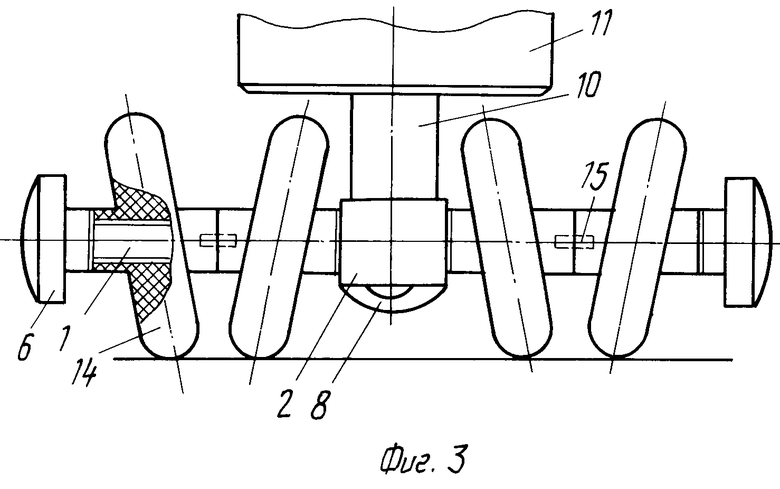
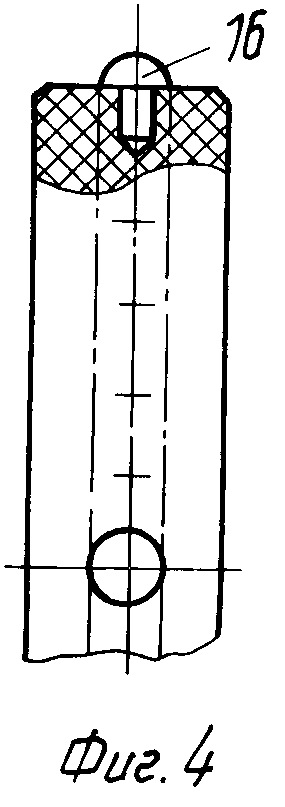
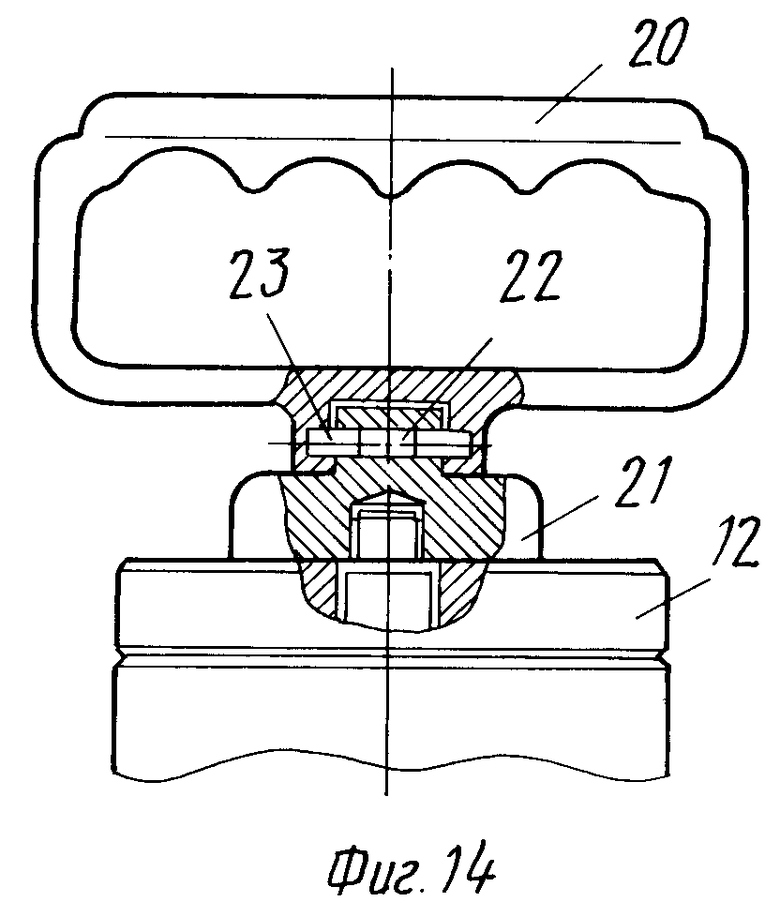
На фиг. 1 и 2 представлен массажер, общий вид; на фиг. 3 выполнение роликов меньшей толщины наклонными; на фиг. 4 прессурные элементы в виде полусферы; на фиг. 5 прессурные элементы в виде атравматического шипа цилиндрического тела, имеющего закругление; на фиг. 6 пример выполнения и фиксации вакуумной присоски; на фиг. 7-12 варианты расположения прессурных элементов и присосок на поверхности роликов; на фиг. 13, 14 примеры выполнения вспомогательных ручек.
Представленный на фиг. 1-3 конструктивный вариант массажера, в частности узел для установки и фиксации грузов, является наиболее предпочтительным, однако возможны и другие варианты установки и фиксации грузов относительно стержня крепления ручки для перемещения.
Роликовый массажер содержит цилиндрический стержень 1, с узлом крепления средней части, в котором под прямым углом установлены узел для установки и фиксации грузов, и ручка 3 для перемещения. На стержне 1 установлены пары съемных роликов 4 и 5, симметрично относительно узла 2 и с возможностью вращения, имеющие различную толщину, форму поверхности и устанавливаемые на требуемом расстоянии друг от друга с помощью проставок втулок 6, а фиксация роликов 4 и 5 обеспечивается гайками 7, имеющими закругленную форму. Ручка 3 для перемещения выполнена в виде стержня, имеющего на конце со стороны рабочей части для захвата утолщение 8, а на ее поверхности насечки или рифления для надежного удержания массажера при его передвижении. Одним из основных существенных условий для эффективного проведения массажа является ориентация и уровень расположения рабочей части ручки 3. Крепление на ручке 3 может осуществляться по отношению к стационарным элементам массажера различным образом, в частности непосредственно на узле 2. Соединение является преимущественно разъемным, например резьбовым, для устройств при транспортировании и сборке.
Рабочая часть ручки 3 ориентирована под прямым углом к вертикали, а по высоте расположена в центральной части роликов 4 и 5, те находятся на высоте, достаточной для того, чтобы при захвате ручки 3 и ориентации ее параллельно массируемой поверхности была бы возможность расположения и касания при этом указательным и большим пальцем удерживающей массажер руки по обе стороны позвоночника для обеспечения пальпитарного контроля.
Ручка 3 выполнена и ориентирована определенным образом к другому элементу роликового массажера штанге 9, входящей в состав узла для установки и фиксации грузов, также основного, определяющего в сочетании с конструкцией рукоятки 3.
Штанга 9 как и ручка 3 может крепиться по отношению к стержню 1 различным образом, например через промежуточную П-образную скобу, имеющую гнезда под квадратного сечения хвостовики на концах стержня 1 (не изображено), в этом случае к этой же скобе может крепиться и ручка 3. Однако, вариант крепления штанги 9 непосредственно на узле 2 является наиболее предпочтительным, простым и технологичным. Штанга 9 крепится преимущественно неразъемно с целью надежного удержания нагружающих ее и массажер в целом элементов-грузов. В нижней части штанги 9 выполнена опорная площадка 10, являющаяся основанием для установки элементов, создающих дозированное нагружение грузов 11 и 12, выполненных преимущественно, в виде дисков с центральным отверстием, имеющих различную массу, например 1 и 3 кг. Грузы 11 и 12 надеваются на штангу 9 и фиксируются вспомогательной ручкой 13, выполненной быстросъемной, преимущественно на резьбовом соединении, и располагаемой на свободном, верхнем конце штанги 9.
Таким образом, массажер представляет из себя следующий статический конструктивный узел: стержень 1 с роликами 4, 5, над которыми симметрично по вертикали расположены грузы 11, 12 для дозированного воздействия на ролики 4, 5, а под прямым углом к линии воздействия грузов 11, 12 и к оси стержня 1 ручка 3, ее рабочая часть, располагаемая на определенной высоте (по отношению к центральной части роликов 4 и 5).
Диаметр грузов (около 100 мм) выбран из соображений обеспечения визуального контроля за обрабатываемым в данный момент участком позвоночника. Ролики 4 и 5 выполняются различной толщины, для данной конструкции на два типоразмера: при диаметре 70-90 мм толщиной 40-45 мм для начального, поверхностного массажа и 15-18 мм для глубинного массажа. Кроме того, ролики 4 и 5 могут иметь различную форму с плоской поверхностью, с закруглением радиусом 4-6 мм, бочкообразной формы. Диаметр роликов определяет степень воздействия: меньший более глубокое при данной ширине, посредством которой также варьируется воздействие. Материал для роликов эбонит, плотная резина, в том числе вакуумная, пластмасса.
Ролики, имеющие меньшую толщину, для усиления воздействия могут устанавливаться с наклоном к оси стержня 1 (фиг. 3) за счет выполнения в ролике 14 отверстия под углом или жесткого соединения его под углом с втулкой, надеваемой вместе с роликом на стержень 1. Соединенные ролики 14 можно установить под углом один к другому и зафиксировать, например, посредством шпонки 15. Благодаря такому выполнению и соединению обеспечивается эффективное сжимающе-разжимающее воздействие на мышцы в направлении от позвоночника.
На поверхности роликов 4 и 5 с целью усиления воздействия могут устанавливаться прессурные элементы в виде полусфер 16 диаметром около 7-8 мм (фиг. 4), представляющих собой заклепки из металла, резины с закруглениями (фиг. 5) и устанавливаемых через шпонки 15 по окружности роликов.
Кроме того, на поверхности роликов могут устанавливаться вакуумные присоски 18, с помощью которых может осуществляться вибромассаж.
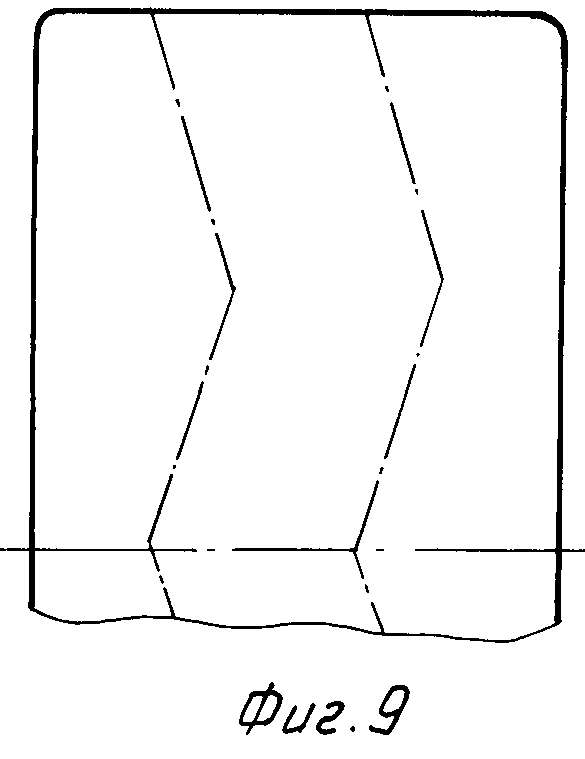
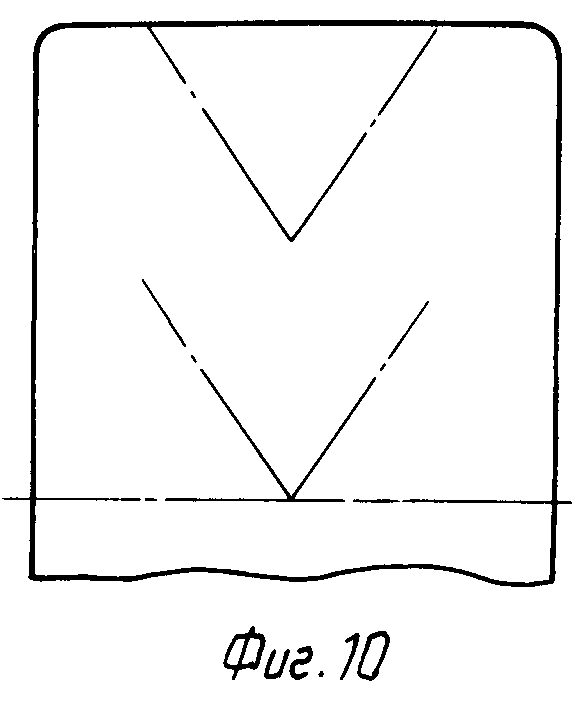
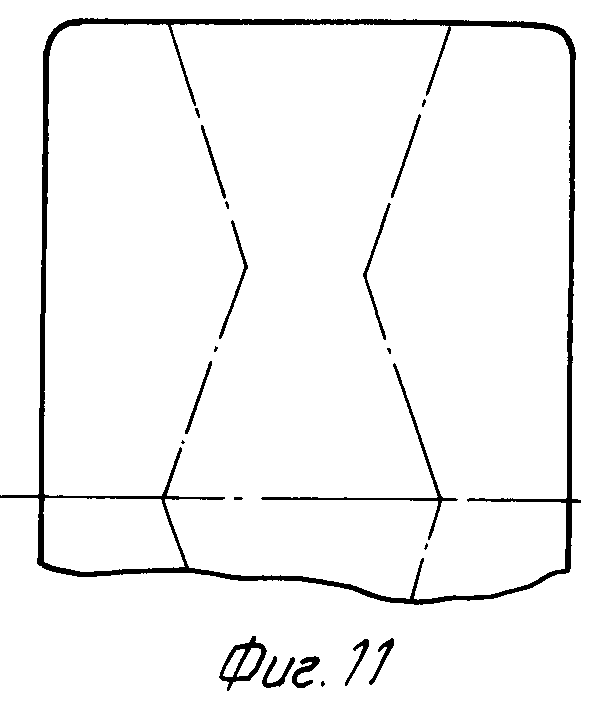
Расположение прессурных элементов полусфер 16, цилиндрических тел 17, а также вакуумных присосок может быть самым различным и показано в нескольких примерах (см. фиг. 7-12, на которых на поверхности роликов условно нанесены штрихпунктирные линии, по которым равномерно располагаются прессурные элементы 16 и 17 или вакуумные присоски 18).
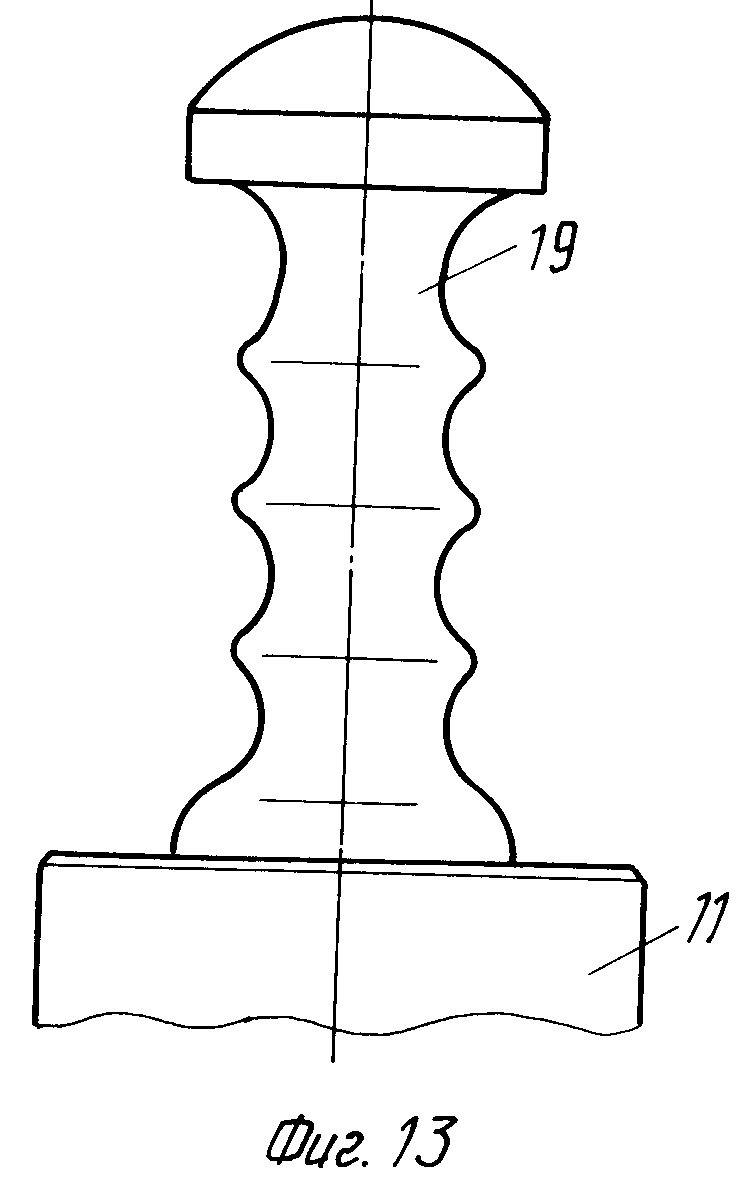
В качестве вспомогательной ручки 13 (см. фиг. 1) могут также использоваться различные конструкции, например ручка 19 в виде вертикального стержня с гнездами под пальцы и грибком сверху, или ручка 20 в виде замкнутой рамки, у которой с внутренней стороны в верхней части также имеются гнезда под пальцы. Ручка 20 может быть выполнена с возможностью свободного вращения вокруг гайки 21, имеющей цилиндрическую проточку 22, в которой устанавливаются штифты 23.
Работа с роликовым массажером происходит следующим образом. В зависимости от общих показаний для проведения массажа осуществляют целенаправленный, профилактический, оздоровительный или лечебный массаж, назначая начальную нагрузку и время, а также режим дозирования. Укладывают пациента на ровную кушетку с твердой поверхностью, руки вдоль туловища. Устанавливают массажер на спину так, чтобы позвоночник проходил между ближайшими к центру стержня 1 роликами 4. Ручку 4 берут так, чтобы большой и указательный палец правой руки, охватывая ручку 3, одновременно располагались бы по условным линиям остистых отростков позвонков, что даст возможность, одновременно удерживая и перемещая массажер, пальпаторно и визуально прослеживать движение роликов 4 и 5 вдоль позвоночника по паравертебральным линиям, которые соответствуют китайскому меридиану мочевого пузыря. Второй рукой (левой) дополнительно удерживают массажер за вспомогательную ручку 13 (фиг. 1) в строго вертикальном положении.
Перемещая массажер вдоль позвоночника, обеспечивают проведение целенаправленного сегментарного массажа на различных его уровнях переходах и отделах, начиная от шейно-грудного перехода, далее грудного отдела, пояснично-грудного перехода, поясничного отдела и пояснично-крестцового перехода. При перемещении нагрузка на руку, находящуюся на ручке 13, минимальная (только для баланса массажера). При развитой мышечной системе пациента, массируемого рукой, на вспомогательной ручке 13 обеспечивают дополнительное кратковременное усиление по ощущениям массируемого.
Дозирование воздействия во времени и по весовой нагрузке осуществляется специалистом в соответствии с индивидуальными особенностями пациента (вес тела, развитость мышечной системы, индивидуальные особенности, возраст и т. д.), учитывая общие показания и противопоказания для проведения массажа.
Конструкция массажера позволяет производить очень эффективный массаж без грузов, при этом он располагается под углом так, чтобы ручка 3 и штанга 9 располагались под углом к поверхности тела, и нажатием на обе ручки 3 и 13 одновременно с дозированным усилием производят воздействие на массируемый участок.
Массажер может также широко использоваться в быту, с минимальным начальным грузом около 3-5 кг.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ КОРРЕКТОР-МАССАЖЕР | 1999 |
|
RU2179010C2 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР-МАССАЖЕР | 1998 |
|
RU2157171C2 |
| КОМБИНИРОВАННЫЙ МАССАЖЕР-МАНИПУЛЯТОР | 1998 |
|
RU2156121C2 |
| МЕХАНИЧЕСКИЙ МАССАЖЕР ЕРМАКОВА | 2011 |
|
RU2489132C2 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ПОЗВОНОЧНИКА | 2006 |
|
RU2308257C1 |
| БАНКА МЕДИЦИНСКАЯ МАССАЖНАЯ | 2005 |
|
RU2280475C1 |
| МАССАЖЁР ДЛЯ ВОЗДЕЙСТВИЯ НА МЫШЦЫ СПИНЫ ТРЕХ ОТДЕЛОВ ПОЗВОНОЧНИКА | 2015 |
|
RU2604047C1 |
| Способ локального прессурно-дистракционного воздействия на глубокие мышечно-фасциальные ткани и устройство для его реализации | 2017 |
|
RU2656542C1 |
| МАССАЖЕР | 1998 |
|
RU2158578C2 |
| УСТРОЙСТВО ДЛЯ САМОМАССАЖА ГЛУБОКИХ МЫШЦ СПИНЫ И ШЕИ | 1998 |
|
RU2141300C1 |

Использование: для проведения сегментарного массажа с дозируемой линейной нагрузкой паравертебральных мышц спины. Сущность изобретения: массажер содержит установленные на оси пары роликов, ручку для перемещения и вспомогательную ручку, узел для установки грузов для дозированного нагружения над роликами по вертикали, при этом рабочая часть рукоятки расположена под прямым углом к вертикали и находится на уровне центральной части роликов. 8 з. п. ф-лы, 14 ил.
| Патент США N 4481939, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
