Изобретение относится к горному делу и может быть использовано при проведении горных работ добычными машинами в комплексе с механизированной крепью, использующими в качестве главного привода асинхронный двигатель.
Известен способ управления горной машиной, в котором стабилизация мощности главного двигателя осуществляется изменением производительности питателя или скорости подачи (Гаврилов П.Д. и др. Автоматизация производственных процессов, М. Недра, 1985, с. 56-64).
Недостатком данного способа является то, что стабилизация мощности главного двигателя осуществляется без связи с имеющимся горным давлением, в месте работы горной машины без учета возможности регулирования горного давления для оптимизации работы горной машины с максимальной производительностью и без учета конкретного напряжения питающей сети.
Известен способ управления горной машиной, основанный на стабилизации нагрузки главного двигателя, включающий непрерывное измерение тока главного двигателя, напряжения питающей сети, разности фаз между ними, сравнения полученных результатов с нормированными и по полученным результатам определяют необходимую корректировку уровня стабилизации наагрузки путем управления регулятором нагрузки [1]
Недостатком данного способа является отсутствие связи между регулятором нагрузки (подачи горной машины) и величинами горного давления и напряжения питающей сети, что при наличии механизированной, регулируемой крепи вполне осуществимо и может способствовать увеличению производительности горной машины.
Наиболее близким по технической сущности и достигаемому результату к предложенному является способ управления горной машиной, включающий измерение тока главного двигателя, напряжения питающей сети, разности фаз между ними и отжима пласта, сравнение полученных результатов с заданными значениями уровней: Xi тока, Xϕ угла сдвига, Xq отжима пласта и регулирование по результатам сравнения уровня нагрузки главного двигателя в соответствии с законом
Z1= [(x ∧ x
∧ x ); (
); ( )] и уровня давления в механизированной крепи, в соответствии с законом
)] и уровня давления в механизированной крепи, в соответствии с законом
Z2= [(x ∨ x
∨ x ); (
); ( )] где X' и X" значения первого и второго заданных уровней соответствующих величин [2]
)] где X' и X" значения первого и второго заданных уровней соответствующих величин [2]
Недостатками данного способа являются: отсутствие сведений об определении фактического отжима пласта в месте работы исполнительного органа горной машины, отсутствие функциональной связи между током главного двигателя, углом сдвига, отжимом пласта и напряжением питающей сети.
Известно, что с ростом отжима пласта обеспечивается более эффективная работа комбайна. Величина опускания кровли в призабойной части регулируется податливостью гидростоек крепления и их расположением. Установлено, что под действием горного давления происходит отжим полезного ископаемого у забоя, который сопровождается образованием трещин и уменьшением общей крепости пласта. Однако, с увеличением отжима растет количество нетранспортабельных кусков, которые проходится дробить вручную, что вызывает вынужденные простои и отрицательно сказывается на производительности машин.
Бессистемное увеличение отжима и увеличение подачи машины приводит к уменьшению производительности машин, так как к негабаритам, образовавшимся за счет отжима, добавляются негабариты "выломанные" исполнительным органом комбайна за счет излишне большой подачи.
Имеется методика, на основании которой для конкретных условий расчетным путем можно определить оптимальные значения скорости подачи и отжима пласта, при которых производительность комбайна будет максимальной, при минимальных потерях времени на устранение негабаритов.
Способ, предлагаемый в прототипе, предусматривает функциональную связь между нагрузкой главного двигателя (т.е. скорости подачи), которая контролируется традиционными методами и оптимальным для данных условий отжимом пласта, который поддерживается автоматически на основании сравнения закномерностей, определенных из физико-механических свойств пласта и результатов непрерывного контроля истинного отжима пласта, величина которого регулируется путем изменения податливости крепи призабойного пространства, причем считается что напряжение питающей сети при этом неизменно, а отжим пласта вдоль всего забоя соответствует единожды измеренному или расчитанному для конкретного давления в измерительной стойке (в прототипе говорится, что отжим контролируется, но техническая реализация не представлена).
Поскольку в реальности говорить о высоком качестве напряжения питающей сети (особенно для протяженных подземных ЛЭП) не представляется возможным, коррекция законов регулирования подачи и давления в механизированной крепи по напряжению питающей сети является необходимой.
В предлагаемом способе (так же как и в прототипе) для команд управления регуляторами нагрузки и давления выбран двоичный код. Под регулятором нагрузки понимается стандартный гидравлический или пневматический узел управления подачи горной машины, в котором при определенных комбинациях сигналов на входах реализуются следующие команды Z1:
0,1 увеличение нагрузки (движение вперед с ускорением),
0,0 постоянная нагрузка (равномерная подача),
1,0 уменьшение нагрузки (замедление движения),
1,1 сброс нагрузки (остановка с последующим движением назад на незначительное расстояние).
Под регулятором давления понимается стандартный узел регулирования давления в механизированной крепи, в которой при определенной комбинации сигналов на входах реализуются команды Z2:
0,0 минимальный отжим, т.е. максимальное давление в секции,
1,0 увеличение отжима, т.е. сброс давления в секции,
0,1 уменьшение отжима, т.е. увеличение давления в секции,
1,1 уменьшение отжима, экстремальное давление в секции.
Поскольку для шахтных условий допустимо отклонение питающего напряжения более чем на 15% будем считать первый уровень напряжения (оптимальный) 0,95 Uн, второй уровень U=Uн. Поскольку работа горной машины при напряжениях равных и выше номинального представлена достаточно в прототипе рассмотрим подробно последствия работы при пониженном напряжении.
Механические характеристики асинхронного двигателя имеют квадратичную зависимость от напряжения. Уменьшение напряжения резко ухудшает механическую характеристику привода исполнительного органа горной машины, а при отсутствии оперативного уменьшения подачи это может привести к опрокидыванию главного двигателя. Поэтому в предлагаемом способе измеренное напряжение введено в первый член двоичного кода закона регулирования подачи
y1= [( ) ∨ (x
) ∨ (x ∧ x
∧ x )] что при любом режиме работы главного двигателя даст комбинацию сигналов: 1,0 уменьшение нагрузки или 1,1 сброс нагрузки, т.е. перегрузка двигателя или опрокидывание его при снижении напряжения питающей сети исключается.
)] что при любом режиме работы главного двигателя даст комбинацию сигналов: 1,0 уменьшение нагрузки или 1,1 сброс нагрузки, т.е. перегрузка двигателя или опрокидывание его при снижении напряжения питающей сети исключается.
Снижение напряжения питающей сети должно отразиться и на законе регулирования отжимом Z2. При пониженном напряжении отжим должен быть максимальным, что уменьшает нагрузку на главный двигатель, поэтому в предлагаемом способе напряжение введено в первый член закона регулирования давления в механизированной крепи
y3= [( ) ∨
) ∨  ∨ x
∨ x ] что при любом режиме работы главного двигателя даст комбинацию сигналов 1,0 увеличение отжима.
] что при любом режиме работы главного двигателя даст комбинацию сигналов 1,0 увеличение отжима.
Вторым преимуществом предлагаемого способа перед прототипом является то, что в закон управления отжимом давления в механизированной крепи (введено дискретное непрерывное измерение фактического давления в механизированной крепи в зоне работы исполнительного органа горной машины. Поскольку в прототипе не представлено техническое решение этой задачи можно утверждать, что там использованы традиционные методы, возможно, измерительная стойка, расположенная в забое и обеспечивающая непрерывную информацию об отжиме (давлении в стойке), но только в том месте, где она расположена. Поскольку физико-механические свойства пород могут быть различны вдоль забоя, кроме того, могут меняться горно-геологические условия и т.д. и это делает получаемую указанным способом информацию об отжиме недостаточно точной. Это может привести к нежелательным явлениям, например выпадению "негабаритов" из пласта или кровли или недопустимой перегрузке главного двигателя. Эти возможные негативные явления исключены в предлагаемом способе, который предусматривает непрерывное определение фактического отжима пласта в зоне работы горной машины с помощью радиоизотопных стандартных устройств, которые обеспечивают не только измерение фактического отжима в зоне работы горной машины, но и блокировку других подобных устройств, предназначенных для этой цели.
В устройстве, реализующем способ, оптимальный режим работы главного двигателя поддерживается традиционным методом по номинальным значениям тока и угла сдвига между током и напряжением питающей сети, а также по значениям конкретного напряжения питающей сети и фактическому отжиму пласта в зоне работы горной машины. Указанные величины в виде пороговых уровней напряжения постоянного тока заданы в ветвях сравнения блока сравнения. Все сигналы, поступающие на входы блока сравнения, унифицированы и в дальнейшем будут представлены следующим образом:
Xi'; Xi''- первый, второй заданные уровни тока главного двигателя,
Xϕ'; Xϕ'' первый, второй заданные уровни угла сдвига между током главного двигателя и напряжением питающей сети,
Xq'; Xq'' первый, второй заданные уровни давления в стойках механизированной крепи, косвенным путем характеризующие отжим пласта,
Xu'; Xu''- первый, второй заданные уровни напряжения питающей сети.
Сравнение истинных значений контролируемых величин, которые подаются на входы блока сравнения с соответствующих датчиков, с заданными определяет комбинацию сигналов двоичного кода (0 или 1) на выходах блока сравнения. С каждой пары выходов блока сравнения комбинация сигналов Х' и Х'' поступает на входы блока управления, на выходах которого с помощью логической схемы, построенной на любой элементной базе, формируются сигналы
y1=(x ∧ x
∧ x ) ∨ (x
) ∨ (x ∨ x
∨ x );
);
y2=(x ∨ x
∨ x ); y3=[(
); y3=[( ) ∨ (x
) ∨ (x ∨ x
∨ x ) ∨ x
) ∨ x ]
]
y4=(x ∨ x
∨ x ).
).
Сигналы у1 и у2 формируют двоичный код закона управления подачей горной машины Z1, а сигналы y3 и y4 закон регулирования давления в механизированной крепи Z2, т. е. регулирование отжима пласта, который был определен заранее для данных конкретных условий, а представлен косвенно через давление в механизированной крепи по причине удобства и точности получения информации. Поскольку в законы управления подачей и давления Z1 и Z2 входит составляющая конкретного напряжения Хuк, то выполняется одна из поставленных целей повышение надежности главного двигателя путем использования рационального отжима пласта и энергетических возможностей главного двигателя при конкретных напряжениях питающей сети. Под рациональными энергетическими возможностями понимается снижение нагрузки главного двигателя (подачи) при уменьшении напряжения питающей сети, при этом закон управления отжимом способствует, в допустимых пределах, реализации процесса разгрузки двигателя. Техническая реализация второй цели повышения точности определения фактического отжима пласта в зоне работы горной машины в предлагаемом устройстве осуществляется с помощью изотопного источника гамма-излучения и системы n приемников изотопного излучения, реле, датчиков давления и гидравлических клапанов с электромагнитным приводом. Количество n перечисленных элепментов определяется физико-механическими свойствами пород кровли и забоя, горно-геологическими условиями и длиной забоя. Немаловажным фактором является постоянная времени перехода от одного значения отжима к другому. Последнее будет определять направленность изотопного излучения и длину зоны действия одного приемника изотопного излучения и гальванически связанных с ним элементов устройства. Поскольку схема блокировки не отличается от общепринятой, подробного описания она не требует. Следует отметить, что все элементы предлагаемого устройства выпускаются промышленностью и используются в горной промышленности. Предполагается, что второстепенные, но необходимые для работы устройства элементы присутствуют в устройстве, хотя и не упоминается в описании.
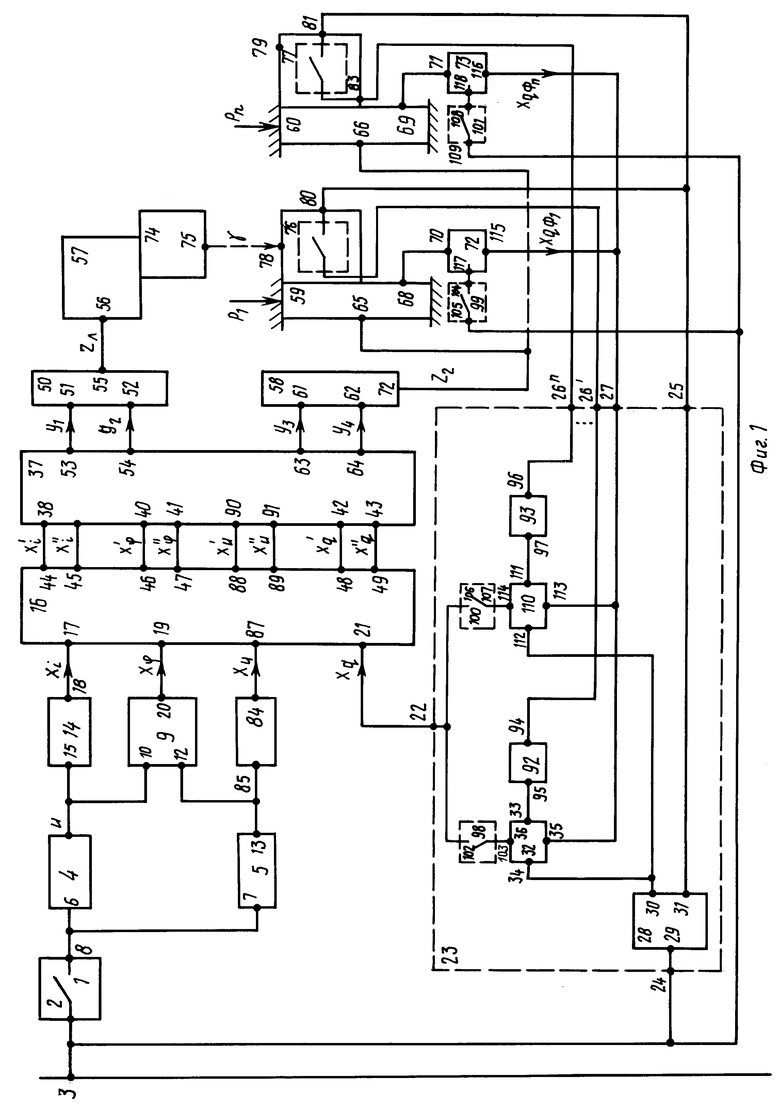
На фиг.1 представлено устройство для управления горной машиной; на фиг.2 возможная схема реализации блока управления; на фиг.3 ветвь сравнения блока сравнения; на фиг.4 зависимости производительности горной машины и подачи от величины отжима пласта.
Устройство управления горной машиной, содержит контактор 1, вход 2 которого подключен к питающей сети 3, датчик 4 синусоидального тока главного двигателя, датчик 5 синусоидального напряжения питающей сети 3, входы 6, 7 которых подсоединены к выходу 8 контактора 1, фазового детектора 9, тактовый вход 10 которого соединен с выходом 11 датчика 4 синусоидального тока, а вход 12 по напряжению с выходом 13 датчика 5 синусоидального напряжения, преобразователь синусоидального тока в напряжение постоянного тока 14, вход 15 которого соединен с выходом 11 датчика синусоидального тока 4, блок сравнения 16, первый 17 вход которого соединен с выходом 18 преобразователя синусоидального тока главного двигателя, второй 19 вход с выходом 20 фазового детектора 16, а третий 21 вход с выходом 22 устройства определения фактического отжима пласта в зоне работы исполнительного органа горной машины 23 с четырьмя 24, 25, 26, 27 входами, содержащего источник стабилизированного напряженимя 28 со входом 29 и выходами 30, 31 и параметрический датчик давления 32 с двумя 33, 34 входами питания, одним 35 измерительным входом и одним 36 выходом, блок управления 37, первый. шестой входы 38, 39, 40, 41, 42, 43 которого соединены с первым. шестым выходами 44, 45, 46, 47, 48, 49 блока сравнения 16, регулятор нагрузки 50, первый 51, второй 52 входы которого соединены с первым 53, вторым 54 выходами блока управления, а выход 55 со входом 56 исполнительного органа горной машины 57, регулятор давления 58 механизированной крепи 59, 60, первый 61, второй 62 входы которого соединены с третьим 63, четвертым 64 выходами блока управления 37, а механизированная крепь 59, 60 имеет магистральные 65, 66 входы, соединенные с выходом 67 регулятора давления 58 и измерительные 68, 69 выходы, соединенные со входами 70, 71 гидравлических клапанов 72, 73 с электромагнитным приводом каждый, источник изотопного излучения 74 с выходом 75, приемники изотопного излучения 76, 77 с изотопными входами 78, 79, входами напряжения 80, 81 и функциональными выходами 82, 83, преобразователь синусоидального напряжения в сигнал постоянного тока 84 со входом 85 и выходом 86, кроме того блок сравнения 16 дополнительно снабжен четвертым 87 входом и двумя 88, 89 дополнительными выходами, блок управления 37 снабжен двумя 90, 91 дополнительными входами, а блок 23 дополнительно снабжено n реле с катушками 92, 93, имеющими зажимы 94, 95 и 96, 97 и с двумя нормально открытыми контактами 98, 99 и 100, 101 каждое с зажимами соответственно 102, 103, 104, 105 и 106, 107, 108, 109 и (n-1) параметрическими датчиками давления 110 с двумя входами питания 111, 112, одним измерительным входом 113 и одним выходом 114, причем первый 24 вход блока 23 соединен со входом 29 независимого источника стабилизированного питания напряжения 28, один из выходов 31 которого соединен со вторым 25 входом блока 23, третий 261(26n) вход которого соединен с первыми зажимами 94(96) катушек 92, 93 реле, вторые 95, 97 зажимы которых соединены с первыми 33, 111 зажимами питания параметрических датчиков давления 32, 110, вторые 34, 112 зажимы питания которых соединены со вторым 30 выходом независимого источника стабилизированного напряжения 28, а измерительные 35, 113 входы датчиков давления 32, 110 соединены с четвертым входом 27 блока 23, выход 22 которого соединен с первыми 102, 106 зажимами первых 98, 100 нормально открытых контактов реле 92, 93, вторые 103, 107 зажимы которых соединены с выходами 36, 114 датчиков давления 32, 110, а первый вход 24 блока 23 соединен со входом 2 контактора 1, второй вход 25 блока 23 соединен со входами напряжения 80, 81 приемников изотопного излучения 76, 77 функциональные выходы 82, 83 которых соединены с третьим 261(26n) входом блока 23, четвертый вход 27 которого соединен с выходами 115, 116 гидравлических клапанов 72, 73, входы управления 117, 118 которых соединены с первыми 104, 108 зажимами вторых 99, 101 нормально открытых контактов реле 92, 93, вторые 105, 109 зажимы которых подсоединены к входу 2 контактора 1, а выход 13 датчика напряжения 5 соединен с входом 85 преобразователя синусоидального напряжения в сигнал постоянного тока 84, входом блока сравнения 16, седьмой 88 и восьмой 89 выходы которого соединены с седьмым 90 и восьмым 91 входами блока управления 37, на первом 53 и втором 54 выходах которого сигналы y1= [(x ∧ x
∧ x ) ∨ (
) ∨ ( ) и y2=(x
) и y2=(x ∨ x
∨ x ) а на третьем 63 и четвертом 64 сигналы y3= [(x
) а на третьем 63 и четвертом 64 сигналы y3= [(x ∨ x
∨ x ) ∨
) ∨  ∨ x
∨ x ] и y4=(
] и y4=( ) (здесь Xi, Xϕ, Xuк, Xqф- сигналы на выходах датчиков тока, фазового детектора, напряжения и давления, а X' и X''- первый и второй заданные уровни соответствующих величин на выходах 44, 45, 46, 47, 48; 88, 89 и 48, 49 блока сравнения 16 и входах 38, 39; 40, 41; 90, 91; 42, 43 блока управления 37), приемники изотопного излучения 76, 77 расположены в определенных местах регулируемой крепи 65, 66, входы 78, 79 приемников изотопного излучения 76, 77 бесконтактным путем соединяются с выходом 75 источника изотопного излучения 74, который расположен непосредственно на горной машине.
) (здесь Xi, Xϕ, Xuк, Xqф- сигналы на выходах датчиков тока, фазового детектора, напряжения и давления, а X' и X''- первый и второй заданные уровни соответствующих величин на выходах 44, 45, 46, 47, 48; 88, 89 и 48, 49 блока сравнения 16 и входах 38, 39; 40, 41; 90, 91; 42, 43 блока управления 37), приемники изотопного излучения 76, 77 расположены в определенных местах регулируемой крепи 65, 66, входы 78, 79 приемников изотопного излучения 76, 77 бесконтактным путем соединяются с выходом 75 источника изотопного излучения 74, который расположен непосредственно на горной машине.
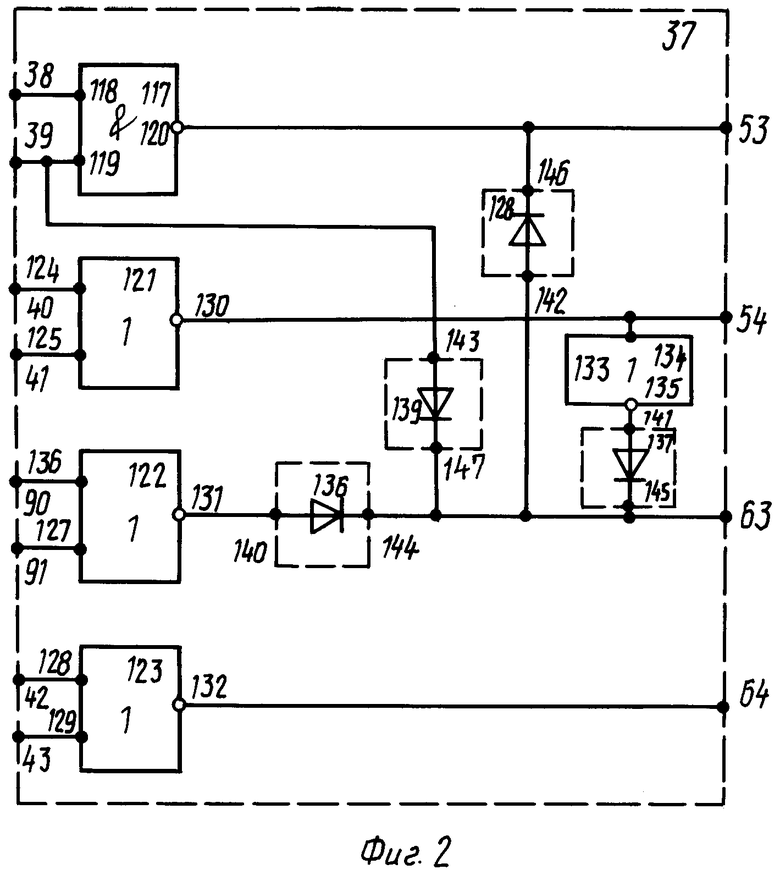
На фиг. 2 представлена схема возможной реализации блока управления 37, которая состоит из логических элементов: одного И 117, с входами 118, 119 и выходом 120, трех 121, 122, 123 ИЛИ-НЕ с входами соответственно 124, 125; 126, 127, 128, 129 и выходами 130, 131, 132, одного инвертора 133 с входом 134 и выходом 135 и четырех диодов 136, 137, 138, 139 с катодами 140, 141, 142, 143 и анодами 144, 145, 146, 147, причем входы 118, 119, 124, 125, 126, 127, 128, 129 логических элементов 117, 121, 122, 123 соединены с входами соответственно 38, 39, 40, 41, 90, 91, 42, 43 блока управления 37, четвертый выход 64 которого соединен с выходом 132 третьего 123 элемента ИЛИ-НЕ, выход 131 второго 122 элемента ИЛИ-НЕ соединен с катодом 140 первого диода 136, анод 144 которого соединен с третьим 63 выходом блока управления 37, второй 54 выход которого соединен с выходом 130 первого 121 элемента ИЛИ-НЕ и входом 134 инвертора 133, выход которого 135 соединен с катодом 141 второго 137 диода, анод которого 145 соединен с третьим 63 выходом блока управления 37, кроме того, третий 63 выход блока управления 37 соединен с катодом 142 третьего диода 138, анод которого соединен с первым 53 выходом блока управления 37 и выходом 120 элемента И 117, вход которого 119 соединен с катодом 143 четвертого диода 139, анод которого соединен с третьим выходом 63 блока управления 37.
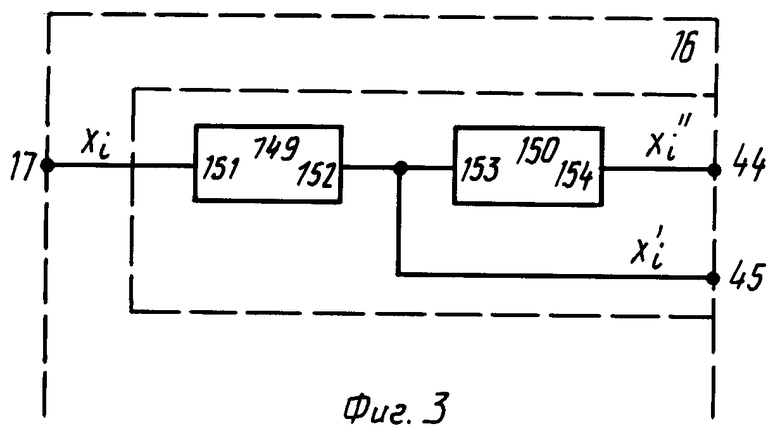
На фиг. 3 представлен блок сравнения 16 для двух уровней тока главного двигателя, угла сдвига, напряжения и отжима пласта в месте работы горной машины. Поскольку сигналы, поступающие на входы 17, 19, 87, 21 блока сравнения 16 унифицированы (промышленностью выпускаются преобразователи, на выходах которых в процессе измерения меняется либо постоянный ток от 0 до 5 мА, либо напряжение постоянного от 0 до 15 мВ), при описании блока сравнения 16 следует отметить, что он состоит из четырех унифицированных ветвей сравнения, одна из которых 148 представлена на фиг.3. Ветвь сравнения 148 содержит два 149, 150 пороговых элемента с зажимами соответственно 151, 152 и 153, 154, причем первый зажим 151 первого порогового элемента 149 соединен со входом 17 блока сравнения 16, а второй 152 зажим первого 149 порогового элемента соединен с первым зажимом 153 второго 150 порогового элемента и выходом 45 блока сравнения 16, выход 44 которого соединен со вторым зажимом 154 второго 150 порогового элемента.
Все узлы устройства являются стандартными или набираются из элементов, выпускаемых промышленностью. Общепринятые, необходимые для работы элементы опущены в перечислении, но наличие их предусмотрено при описании работы устройства, к ним, в частности, относятся элементы настройки уровней пороговых элементов, цепи или элементы необходимой временной задержки и фильтрующие цепи блока сравнения. Под регулятором нагрузки понимается стандартный узел управления цепной, гидравлической или пневматической подачей горной машины, у которой при комбинации сигналов на его входах 51, 52 "0", "1" осуществляется подача "вперед" с ускорением, т.е. увеличение нагрузки, при сигналах "0", "0" равномерная подача "вперед", т.е. установившаяся нагрузка, при сигналах "1", "0" осуществляется сброс нагрузки, а при сигналах "1", "1" стоп, подача назад.
Под регулятором давления понимается стандартный узел управления давлением в стойках механизированной крепи, причем при комбинации сигналов на его входах 61, 62 "0", "0" давление в стойках максимальное, отжим пласта минимальный, при сигналах "1", "0" сброс давления в стойках, т.е. увеличение отжима пласта, при сигналах "0", "1" увеличение давления в стойках гидрокрепи, т. е. уменьшение отжима, а при сигналах "1", "1" экстренное увеличение давления в стойках механизированой крепи. Под гидравлическими клапанами с электромагнитным приводом 72, 73 понимается стандартное устройство, управление которым осуществляется дистанционно с помощью электрического привода. Считается, что при наличии напряжения на входе 117 или 118 управления гидравлического клапана 72 или 73, последний открывается с помощью имеющегося электропривода, а при отсутствии напряжения клапан закрывается с помощью механических устройств. Не исключена возможность закрывания клапана с помощью имеющегося электропривода путем его реверсирования, что потребует применения вместо нормально открытых контактов 99, 101 переключающих контактов реле 92, 93, а также применение в схеме коммуникаций привода клапана вместо обычного контактора реверсивного контактора.
При описании работы устройства считается, что техническое состояние горной машины и крепи не имеет отклонений от норм, дополнительный источник питания 28 подключен к сети независимо от главного двигателя, пуск главного двигателя происходит вхолостую.
В описании работы устройства рассмотрены три уровня каждой влияющей величины, хотя в принципе количество уровней может быть любым, что повлечет увеличение числа составляющих в законах управления элементов в блоке сравнения числа входов, а следовательно, и числа элементов в блоке управления. Необходимо заметить, что предложенная в описании схема управления на логических элементах, их количество, функциональные особенности и элементная база могут быть любыми, но комбинация сигналов на выходах, при предлагаемой комбинации сигналов на входах, должна составаться неизменной, соответствующей предложенному двоичному коду.
Устройство согласно предлагаемому изобретению работает следующим образом.
1. Напряжение сети равно или больше номинального.
В этих случаях описание работы устройства аналогично работе прототипа при указанных напряжениях, так как в законы управления подачей и давлением в механизированной крепи слагаемое, учитывающее напряжение, входит как "0", т. е. на конечные результаты функций Z1 и Z2 влияния не оказывает. Действительно, при пониженном напряжении питающей сети на выходах 88, 89 блока сравнения 16, а следовательно, и на входах 90, 91 блока управления 37 сигналы в этих случаях равны "1", "0" или "1", "1". Такая комбинация сигналов на входах 126, 127, фиг.2 второго 122 логического элемента ИЛИ-НЕ формирует на его выходе 131 сигнал "0", который через диоды 136 и 138 поступает на выходы 53 и 63 блока управления 37, закон регулирования уровня нагрузки в этих случаях
Z1=[(x ∧ x
∧ x )+0] (
)+0] ( )=(x
)=(x ∧ x
∧ x ); (
); ( )
)
а закон регулирования уровня давления в механизированной крепи
Z2=[0+(x ∨ x
∨ x ) ∨ x
) ∨ x ] [
] [ ][x
][x ∨ x
∨ x )+x
)+x ] [x
] [x ∨ x
∨ x ]
]
т. е. при номинальном и выше номинального напряжения сети закон управления подачей Z1 совпадает с подобным законом в прототипе, а закон управления давлением Z2 отличается от подобного закона в прототипе наличием слагаемого которое, являясь первым заданным уровнем тока главного двигателя, соответствует максимально допустимому току при минимальном напряжении питающей сети, например 0,8 от номинального напряжения. При превышении током главного двигателя величины первого заданного уровня, отжим должен быть увеличен (если это возможно), что и осуществляется путем подачи сигнала Xi'1 со входа 39 блока управления 37 через диод 139 на его выход 63. Поскольку регулирование отжима приводит к разгрузке главного двигателя, слагаемое Xi' закона регулирования отжимом Z2 в процессе работы может не быть равным "1", что при снижении напряжения питающей сети ниже заданного первого уровня Xu' может привести к опрокидыванию главного двигателя, последнее исключается введением в Z2 слагаемого (Xu' Xu''), которое при пониженном напряжении сети гарантирует сигнал "1" на выходе 63 блока управления 37, а это в свою очередь гарантирует в пределах допустимого комбинацию сигналов на выходах 63, 64 соответствено "1", "0", т.е. увеличение отжима и разгрузку главного двигателя. Подробно возможные режимы работы устройства, комбинации сигналов на входах и выходах его элементов представлены в таблице, приведенной ниже после изложения описания работы устройства при пониженном напряжении питающей сети.
2. Работа устройства при пониженном напряжении сети, например 0,8 от номинального.
Горная машина находится вне зоны действия приемника изотопного излучения. Напряжение от питающей сети 3 поступает на вход 2 контактора 1, с выхода которого 8, напряжение сети 3 поступает на входы 6 и 7 датчика тока 4 и датчика напряжения 5. С выхода 11 датчика тока 4 сигнал, пропорциональный току главного двигателя, поступает на токовый вход 10 фазового детектора 9 и на вход 15 преобразователя синусоидального тока 7 в сигнал постоянного тока 14, а с выхода 13 датчика напряжения 5 сигнал, пропорциональный напряжению сети, поступает на вход 12 фазового детектора 9 и вход 85 преобразователя синусоидального напряжения в сигнал постоянного тока 84. Одновременно напряжение сети 3 подается на первый вход 24 блока 23, с которого подается на вход 29 независимого источника питания 28, с выхода которого 30 напряжение сети поступает на входы 34, 112 параметрических датчиков давления 32, 110, со входов которых 33, 111 напряжение сети поступает на зажим 95, 97 катушек реле 92, 93 вторые зажимы которых 94, 96 соединены со входом 261-n блока 23, который соединен с функциональными выходами 82, 83 приемников изотопного излучения 76, 77. Поскольку горная машина находится вне зоны действия приемника изотопного излучения 76 или 77, т.е. гамма-излучение с выхода 75 источника изотопного излучения 74 и не попадает на вход 78 или 79 приемников изотопного излучения 76 или 77, то отсутствует гальваническая связь между функциональным выходом 82 и 83 и входом напряжения 80 или 81 приемника изотопного излучения 76 или 77, что определяет отсутствие тока в катушке реле 92 или 93, цепь которых замыкается через вход по напряжению 80 или 81 приемников изотопного излучения 76, 77, соединенный с ними вход 25 блока 23 и второй выход 31 независимого источника напряжения 28, Отсутствие тока в катушке реле 92 или 93 приводит к тому, что их нормально открытые контакты 98, 99, 100, 101 разомкнуты, а это приводит к тому, что на измерительный вход 35 или 113 параметрического датчика 32 или 110 с выхода 115 или 116 гидравлического клапана 72 или 73 информация о давлении в механизированной крепи не поступает, кроме того, разомкнутый контакт 98 или 100 определяет сигнал "0" на выходе 22 блока 23, который подается на вход 21 блока сравнения 16. Одновременно, поскольку режим соответствует холостому ходу, на входы 17, 19, 87 блока сравнения 16 с выходов 18, 20, 86 преобразователя синусоидального тока главного двигателя в сигнал постоянного тока 14, фазового д етектора 9 и преобразователя синусоидального напряжения в сигнал постоянного тока 84, поступают сигналы, характеризующие холостой ход при пониженном напряжении питающей сети, которые являются недостаточными для срабатывания первых, например, 49 пороговых элементов ветвей сравнения блока сравнения 16 (фиг.3), что приводит к формированию на его выходах 44, 45, 46, 47, 88, 89 и 48, 49, а, следовательно, и на входах 38, 39, 40, 41, 90, 91 и 42, 43 блока управения 37 сигналов "0".
Такая комбинация сигналов на входах блока управления 37 формирует на его выхоах 53, 54, 63, 64 в соответствии с предложенными законами управления подачей и давлением в стойках механизированной крепи, а также в соотетствии со схемой фиг.2, следующие сигналы:
на выходе 53 y1=(x ∧ x
∧ x ) ∨ (x
) ∨ (x ∨ x
∨ x )=(0·0)+(
)=(0·0)+( )=1;
)=1;
на выходе 54 y2=( )=(
)=( )=1;
)=1;
на выходе 63 y3=( ) ∨ (x
) ∨ (x ∨ x
∨ x ) ∨ x
) ∨ x =(
=( )+(0+0)+0=1;
)+(0+0)+0=1;
на выходе 64 y4=( )=(
)=( )=1.
)=1.
Таким образом, закон управления подачей в этом случае имеет вид Z1= (1; 1), закон управления давлением Z2 (1; 1), что соответствует команде регулятору нагрузки "стоп, назад" (т.е. машина стоит, эта команда приводит к тому, что запустить машину не удастся), а команда регулятору давления "экстремальное повышение давления в механизированной крепи" предотвратит возможные негативные последствия, связанные с отсутствием информации об отжиме пласта.
Из вышеизложенного следует, что при напряжении сети ниже допустимого уровня запуск машины, а следовательно, ее работа невозможны. Для запуска машины необходимо провести мероприятия, обеспечивающие повышение напряжения питающей сети (например, переключение обмотки участкового трансформатора, питающего сеть на отпайку, обеспечивающую повышение напряжения).
б) Горная машина находится в зоне действия одного из приемников изотопного излучения, работает на первых уровнях тока главного двигателя, угла сдвига и отжима пласта, снижение напряжения ниже 0,8 от номинального произошло в процессе работы.
Предположим машина работает в зоне действия приемника изотопного излучения 76, на вход которого 78 с выхода 75 источника изотопного излучения 74 попадает гамма-излучение, что приводит к появлению гальванической связи между входом напряжения 80 и функциональным выходом 82, который через третий 26 вход блока 23 соединен с зажимом 94 катушки реле 92, второй 95 зажим которой соединен с первым 33 входом напряжения параметрического датчика давления 32, второй 34 зажим которого соединен с первым 30 выходом независимого источника стабилизированного напряжения 28, второй выход 31 которого соединен со вторым 25 входом блока 23, который соединен с функциональным выходом 82 приемника изотопного излучения 76, т.е. последовательно соединенная цепь из параметрического датчика давления 32, катушки реле 92, приемника изотопного излучения 76 замкнута, через катушку реле 92 течет ток, что приводит к замыканию нормально открытых контактов 98. 99, это приведет к появлению сигнала на входе управления 117 и электропривод гидроклапана 72 приведет последний в рабочее состояние, а с измерительного выхода 68 секции механизированной крепи 59 на вход 70 гидроклапана 72 поступит информация о давлении в секции крепи, которая с выхода 115 гидроклапана 72 поступает на вход 27 блока 23, с которого информация поступает на измерительный вход 35 параметрического датчика давления 32, с выхода которого 36 сигнал постоянного тока, пропорциональный давлению через замкнутый контакт 98 поступает на выход 22 блока 23, откуда подается на вход 21 блока сравнения 16. При вышеперечисленных начальных условиях, а именно:
Xi' 1, Xi'' 0, Xϕ' 1, Xϕ'' 0, Xuк' Xuк; 0, Xqф' 1, Xqф'= 0 работа регуляторов подачи 50 и давления 59 будет, в соответствии с законом Z1 и Z2, следующая:
Z1=[y1; y2][1·0)+( ); (
); ( )][1;0]
)][1;0]
Z2=[y3; y4][( )+(1+0)+1] [
)+(1+0)+1] [ ]
]
т.е. при снижении напряжения питающей сети на входе 51, 52 регулятора нагрузки 50 поступает комбинация сигналов, соответствующая команде "сброс нагрузки", что предотвратит порокидывание главного двигателя, а на входы 61, 62 регулятора давления в секции механизированной крепи-команда "сброс давления" или "увеличение отжима", что также сделает режим работы главного двигателя более щадящим, исключающим перегрузку.
Как следует из вышесказанного информация об отжиме пласта или о давлении в секции механизированной крепи поступает именно из зоны работы горной машины. Из n-го количества датчиков давления, гидравлических клапанов и реле задействованы только те, которые предназначены для работы в данной конкретной зоне. При переходе горной машины в следующую зону исчезает гальваническая связь между входом напряжения 80 и функциональным выходом 82 приемника изотопного излучения 76, катушка реле 92 обесточивается, нормально открытые контакты 98, 99 размыкаются и информация о давлении в секции механизированной крепи 59 на выход 22 блока 23 не поступает, ее заменяет информация о давлении в следующей секции 60, в зоне которой начинает работать исполнительный орган горной машины 57.
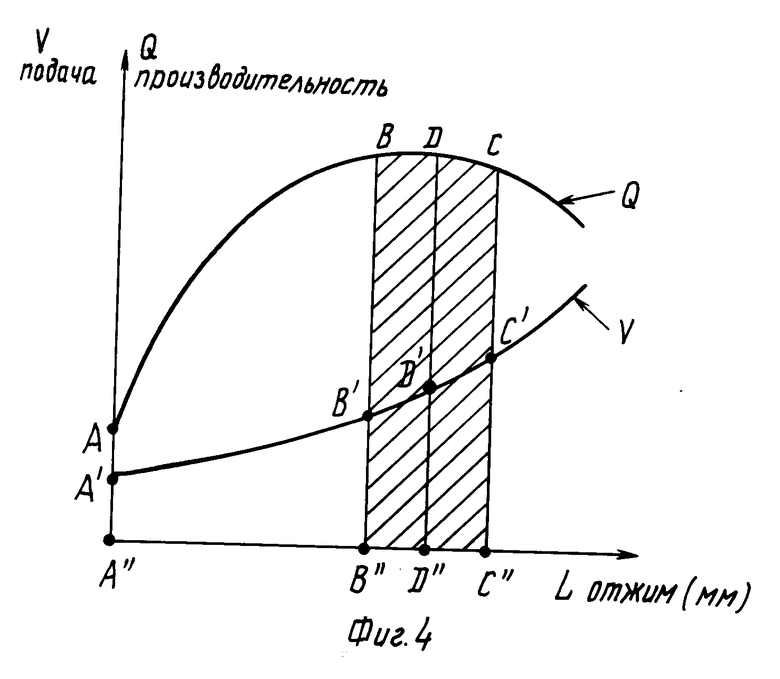
Необходимо отметить, что предлагаемое устройство может работать не только с секционированной крепью. Если крепь не секционированная, то информация об отжиме, т.е. давлении в крепи в зоне работы горной машины поступает с контрольных стоек, количество которых равно числу контролируемых зон. Как следует из графиков зависимостей производительности Q, скорости подачи V от отжима пласта L первый заданный уровень отжима или давления в стойках крепи соответствует участку А" В" фиг.4, при этом подача и производительность будут изменяться в соответствии с участками соответственно A', B' и АВ. Второй заданный уровень отжима пласта (давления в стойках) соответствует участкам B", D", B'D' и BD, превышение которого практичеспки не изменит производительность на участке ДС, но чревато возможностью возникновения негабаритов, что нежелательно, поэтому при работе горной машины регулирования отжима рационально в зоне B"D", подачи B'D' при этом производительность будет изменяться в зоне BD. Поскольку в закон регулирования отжимом входят все влияющие величины
y1 f(i, ϕ, u) и y2 f(u, qф), поддержание отжима в нужных пределах без нарушения правил безопасности осуществимо, что подтверждает вышеизложенное описание.
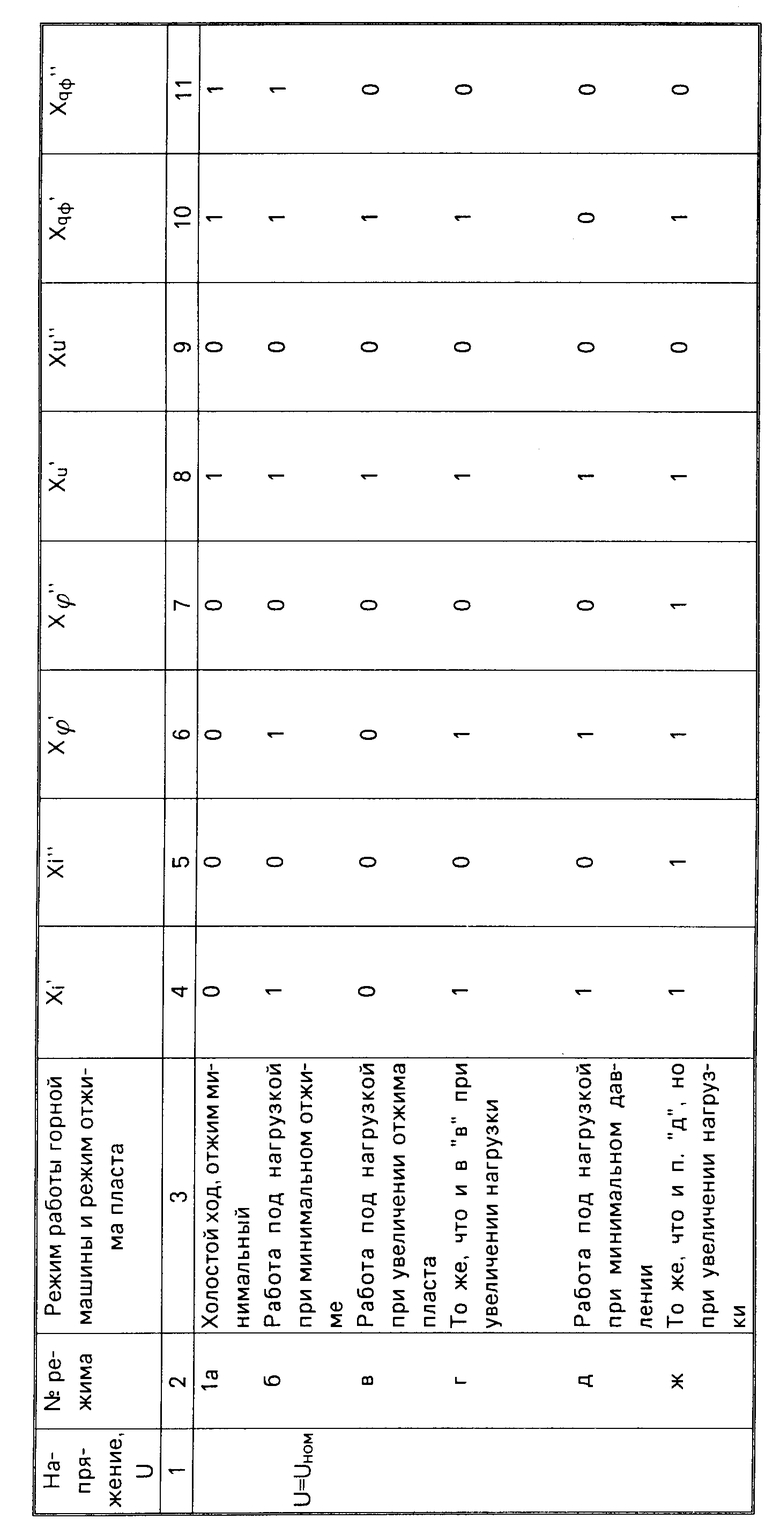
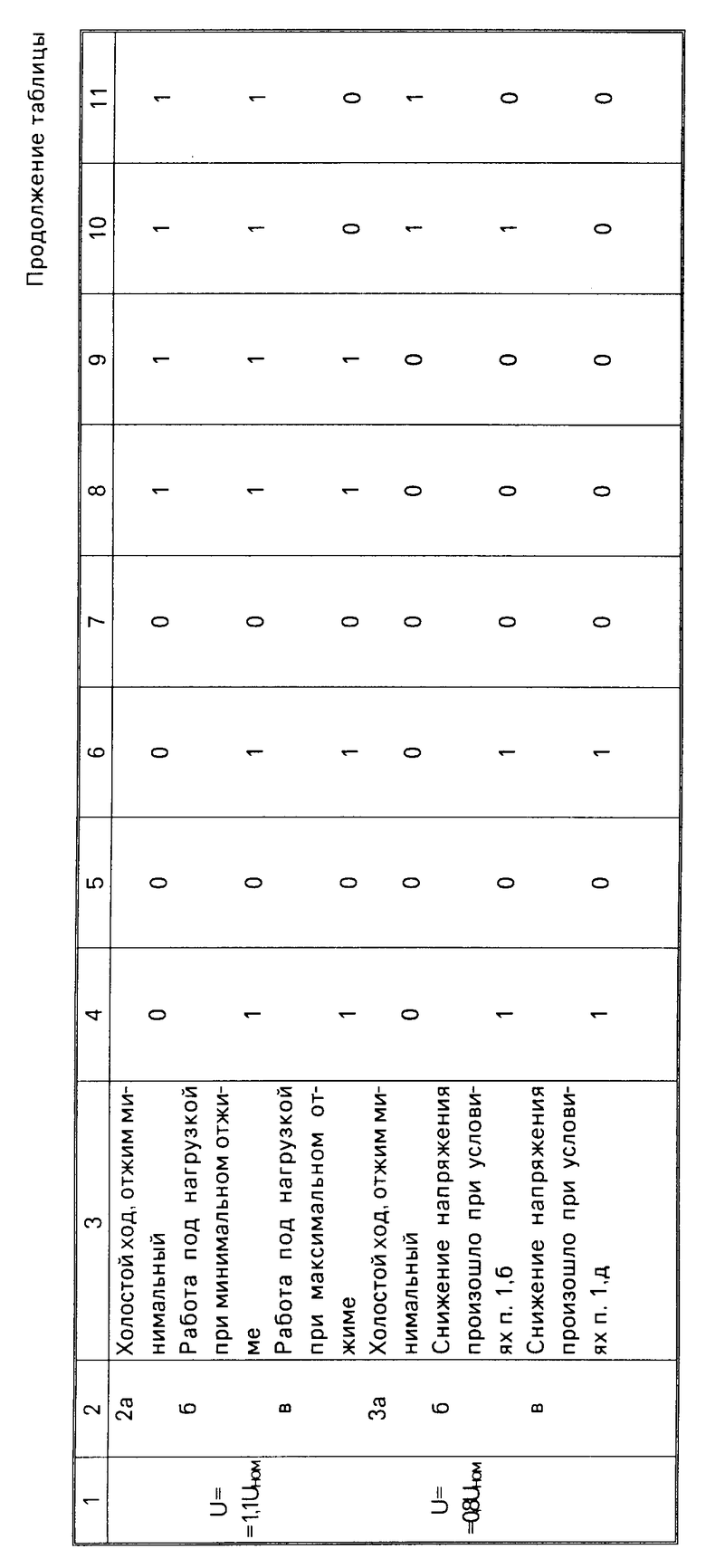
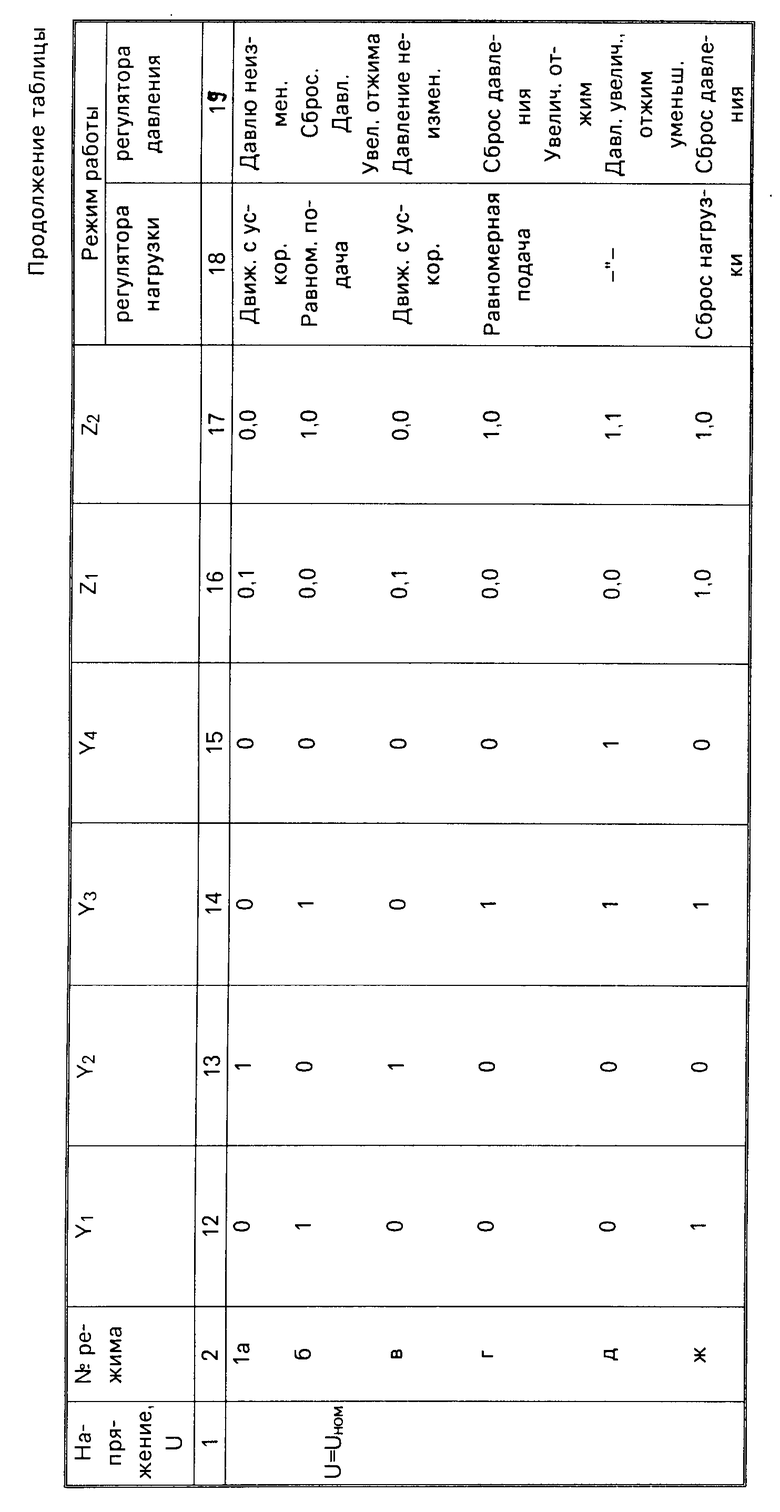
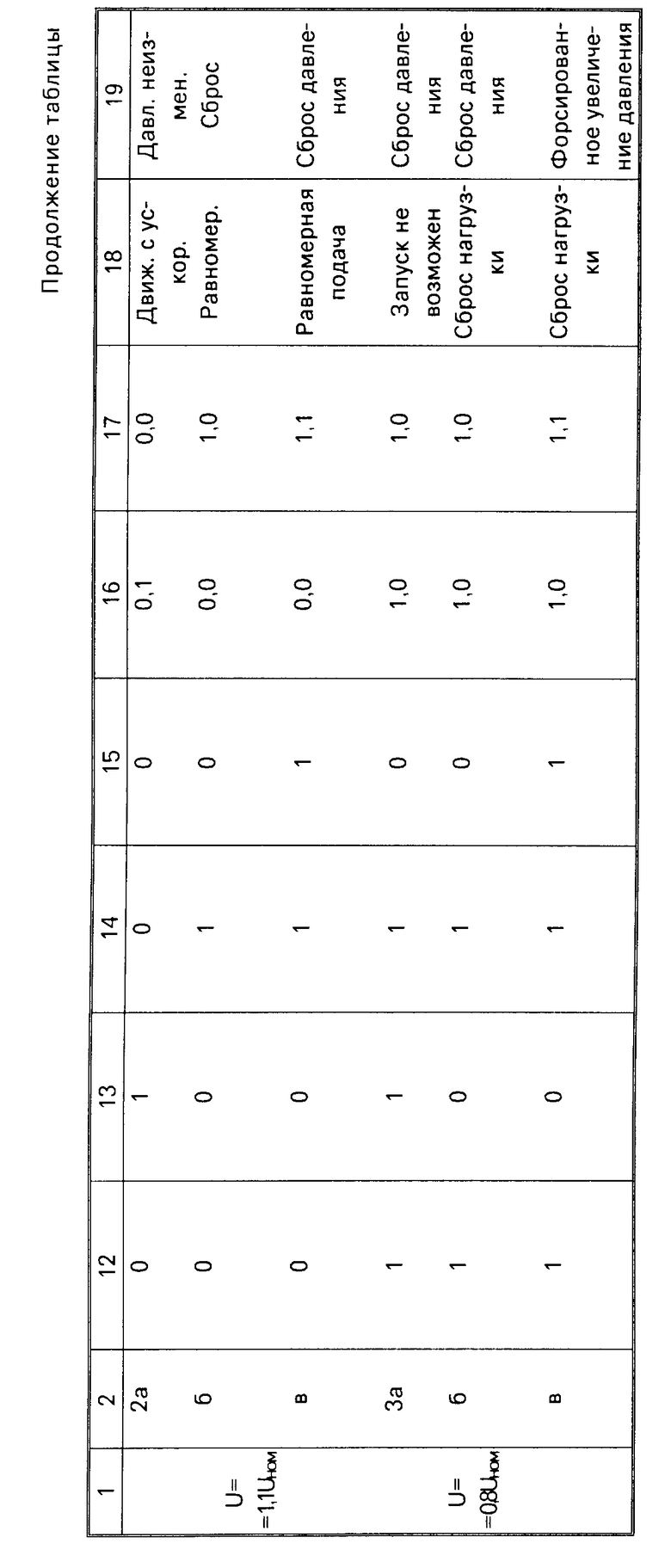
Для сокращения опиания при доказательстве работоспособности устройства результаты распределения сигналов на выходах 44, 45, 46, 47, 88, 89, 48, 49 блока сравнения 16, а следовательно, и комбинации сигналов на входах 38, 39, 40, 41, 90, 91, 42, 43 блока управления 37, а также сформированные блоком управления 37 сигналы на его выходах 53, 54, 63, 64 и реализуемые в каждом конкретном случае регулятором нагрузки 50 и регулятором давления 58 законы управления подачей и давлением в секциях механизированной крепи Z1 и Z2 представлены в таблице. При составлении таблицы сигналы на входах 38, 39, 40, 41, 90, 91, 42, 43 обозначены соответственно: Xi', Xi'', Xϕ', Xϕ'', Xu', Xu'', Xqф', Xqф'', сигналы на выходах 53, 54, 63, 64 обозначены как у1, у2, у3, у4, сигналы на выходе 55 регулятора нагрузки Z1, а на выходе 67 регулятора давления в механизированной крепи 59 Z2.
Результаты, приведенные в таблице, подтверждают приведенное выше утверждение, что предлагаемое решение, уточняя законы регулирования подачей Z1 и давлением в механизированной крепи Z2 путем введения в них фактического отжима пласта Xqф в зоне работы горной машины, при номинальном и выше номинального напряжения питающей сети повторяют функции прототипа. В то же время при снижении напряжения питающей сети в пределах (и ниже) допустимого предлагаемое решение реализует поставленную цель повышение надежности, путем сброса нагарузки при снижении напряжения, что исключает опрокидывание главного двигателя или, если происходит запуск горной машины при пониженном напряжении, исключает его осуществление.
Изобретение относится к горному делу и может быть использовано при проведении горных работ добычными машинами и комплексами, использующими в качестве главного привода асинхронный двигатель. Сущность изобретения заключается в том, что измеряют ток главного двигателя и напряжение питающей сети, определяют разность фаз между ними, измеряют давление в стойках механизированной крепи в месте работы исполнительного органа, сравнивают полученные значения с заданными значениями уровней тока, угла сдвига, давления в стойках механизированной крепи, напряжения питающей сети и регулируют уровень нагрузки главного двигателя и уровень давления в механизированной крепи в соответствии с формулами, приведенными в тексте описания. 4 ил. 1 табл.
СПОСОБ УПРАВЛЕНИЯ ГОРНОЙ МАШИНОЙ, включающий измерение тока xi главного двигателя и напряжения питающей сети  определение разности фаз между ними Xϕ измерение давления в стойках механизированной крепи Xq, сравнение полученных результатов с заданными значениями уровней
определение разности фаз между ними Xϕ измерение давления в стойках механизированной крепи Xq, сравнение полученных результатов с заданными значениями уровней  тока,
тока,  угла сдвига,
угла сдвига,  давление в стойках механизированной крепи
давление в стойках механизированной крепи  и напряжение питающей сети и регулирование уровней нагрузки главного двигателя и давления в механизированной крепи, отличающийся тем, что, с целью повышения точности регулирования, измерение давления в стойках механизированной крепи осуществляют в месте работы исполнительного органа горной машины, а регулирование уровня нагрузки главного двигателя осуществляют в соответствии с законом
и напряжение питающей сети и регулирование уровней нагрузки главного двигателя и давления в механизированной крепи, отличающийся тем, что, с целью повышения точности регулирования, измерение давления в стойках механизированной крепи осуществляют в месте работы исполнительного органа горной машины, а регулирование уровня нагрузки главного двигателя осуществляют в соответствии с законом

и уровня давления в механизированной крепи в соответствии с законом

| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления горной машиной и устройство для его осуществления | 1987 |
|
SU1502828A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
