г
33
;j;
/5
/5
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГОРНОЙ МАШИНОЙ | 1988 |
|
RU2041353C1 |
| Устройство управления горной машиной | 1987 |
|
SU1513140A1 |
| Способ управления горной машиной | 1989 |
|
SU1805214A1 |
| Способ управления горной машиной | 1990 |
|
SU1781426A1 |
| Источник реактивной мощности узла нагрузки | 1988 |
|
SU1661910A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Способ определения оптимального технического состояния механизмов многодвигательного одноковшового экскаватора и стенд для его осуществления | 1990 |
|
SU1774008A1 |
| Устройство для автоматического регулирования режимов реактивной мощности узла нагрузки системы электроснабжения | 1989 |
|
SU1833938A1 |
| Регулируемый электропривод угольного комбайна | 1986 |
|
SU1355706A1 |
| Способ автоматического регулирования режимов реактивной мощности узла нагрузки электрической сети | 1989 |
|
SU1781764A1 |
Изобретение относится к горному делу и позволяет повысить производительность и увеличить межремонтный срок горной машины. Для этого измеряют ток главного двигателя горной машины, напряжение питающей сети, разность фаз между ними и давление в стойках механизированной крепи. Сравнивают измеренные величины с заданными дискретными уровнями и результаты сравнения используют для регулирования уровня нагрузки главного двигателя в соответствии с выражениями Z1=[(XI @ XI)
(X1 @ X11)]
Z2=[(X1 @ X11)
(X1 @ XN)] где Z1 - закон управления подачей
Z2 - закон управлени величиной отжима пласта за счет изменения давления в гидростойках крепи
XI - уровни тока статора главного двигателя
X - уровни угла сдвига между током главного двигателя и напряжением питающей сети
Xφ - уровни давления в стойках механизированной крепи. Устройство для осуществления способа содержит датчик 1 тока, датчик 2 напряжения, фазовый детектор 10, блоки сравнения /БС/ 11, 18, 19, регулятор 13 нагрузки, исполнительный элемент 16, механизированную крепь 17, блок управления /БУ/ 20, дополнительный источник питания 21, датчик 22 давления и регулятор 23 давления. Сигнал тока поступает с датчика 1 на первый вход фазового детектора 10 и на вход БС 11. Сигнал напряжения с датчика 2 сравнивается по фазе с сигналом тока в детекторе 10. Результаты сравнения сигналов тока и сдвига фаз с заданными дискретными уровнями поступают в БУ 20. Сигнал давления в стойках крепи, пропорциональный величине отжима пласта, сравнивается в БС 19 с заданными уровнями и поступает в БУ 20. Последний выдает управляющие воздействия по двум каналам регулирования: через регулятор 13 нагрузки и регулятор 23 давления. 2 с.п.ф-лы. 3 ил.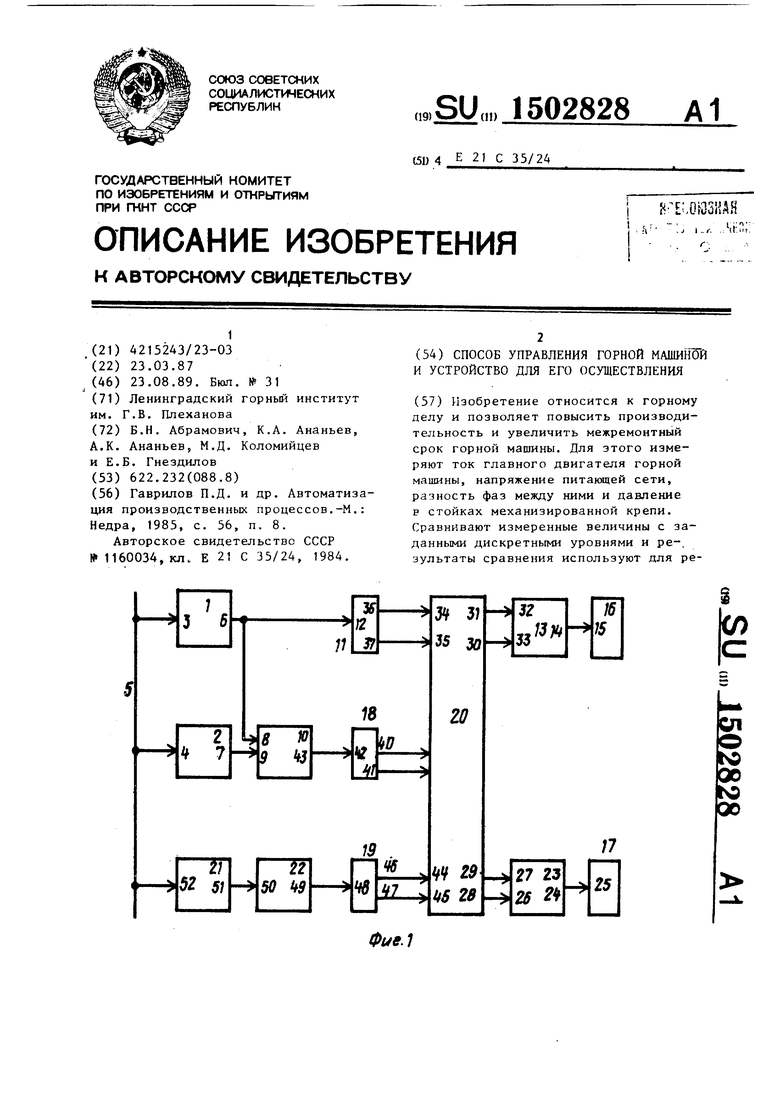
Фие.
3150
гулирования уровня нагрузки глаьного двигателя в соответствии с вьфажени- ями Z, t(Xi Л Х1 ) ; (х; V Xj) ; ZQ -{(); (Х t Xj)l , где Z - за- кон управления подачей, ZQ - закон управления величиной отжима пласта за счет изменения давления в гидростойках крепи; Х, - уровни тока статора главного двигателя; Х, - уровни угла сдвига между током главного двигателя и напряжением питающей сети; Ха - уровни давления в стойках механизированной крепи. Устройство для осуществления способа содержит датчик 1 тока, датчик 2 напряжения, фазовый детектор 10, блоки сравнения (БС) 11, 18, 19, регулятор 13 наг-. рузки, исполнительный элемент 16, механизированную крепь 17, блок уп-
Изобретение относится к области горного дела и может быть использовано при проведении горных работ добычными машинами в комплексе с механизированной крепью.
Цель изобретения - повышение производительности и увеличение межремонтного срока горной машины за счет оптимизации уровня отжима пласта и энергетических возможностей главного двигателя горной машины.
Способ управления горной машиной позволяет оптимизировать нагрузку главного двигателя с помощью корректировки последней не только по току и номинальному значению угла сдвига между током главного двигателя и напряжением питающей сети, но и оптимальному отжиму пласта, который для каждых конкретных условий определяется расчетным или опытным путем.
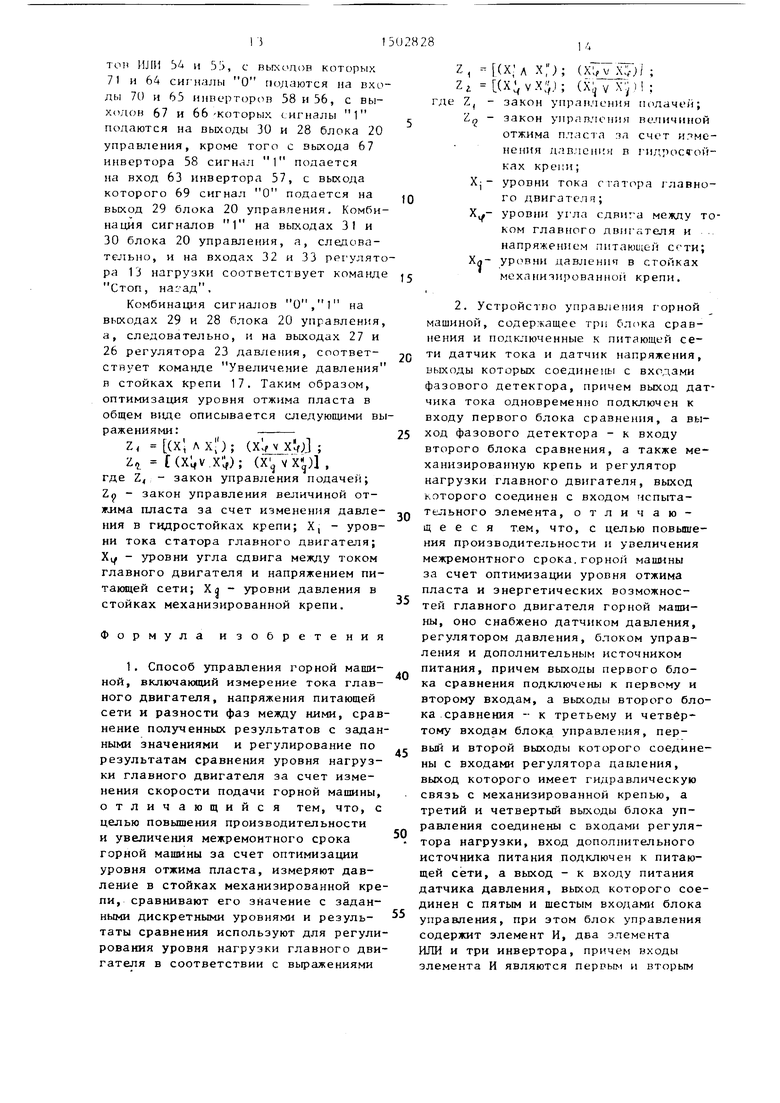
На фиг. 1 представлена функциональная схема устройства, реализующего способ управления горной машины; на фиг. 2 - функциональная схема блока управления; на фиг. 3 - функци ональная схема блока сравнения.
Устройство управления горной машиной (фиг. 1) содержит датчик 1 тока главного двигателя и датчик 2 нап ряжения, подсоединенные входа ми 3 и 4 к питающей сети 5, а выходами 6 и 7 к входам 8 и 9 фазового детектора 10, первый блок 11 сравнеравлеиия (БУ) 20, дополнительный источник питания 21, датчик 22 давления и регулятор 23 давления. Сигнал тока поступает с датчика 1 на первый вход фазового детектора 10 и на вход БС 11. Сигнал напряжения с датчика 2 сравнивается по фазе с сигналом тока в детекторе 10. Результаты сравнения сигналов тока и сдвига фаз с заданными дискретными уровнями поступают в БУ 20. Сигнал давления в стойках крепи, пропорциональный величине отжима пласта, сравнивается в БС 19 с заданными уровнями и поступает в БУ 20. Последний вьщает уп- равляюп1ие воздействия по двум каналам регулирования: через регулятор 13 нагрузки и регулятор 23 давления. 2 с.п. ф-лы, 3 ил.
ния, вход 12 которого соединен с выходом 6 датчика 1 тока, регулятор 13 нагрузки, выход 14 которого соединен с входом 15 исполнительного эле- 30 мента 16, и механизированную крепь 17, второй 18 и третий 19 блоки сравнения, блок 20 управления, дополнительный источник 21 питания, датчик 22 давления и регулятор 23 давления, 35 выход 24 которого связан с входом 25 механизированной крепи 17, а два входа 26 и 27 с первым 28 и вторым 29 выходами блока 20 управления,третий 30 и четвертый 31 выходы которо- 40 го соединены с первым 32 и вторым 33 входами регулятора 13 нагрузки, а первый 34 и второй 35 входы блока 20 управления соединены с первым 36 и. вторым 37 выходами первого блока 11
5 сравнения, третий 38 и четвертый 39 входы блока 20 управления соединены с первым 40 и вторым 41 выходами второго блока 18 сравнения, вход 42 которого соединен с выходом 43 фазово- Q го детектора 10, а пятый 44 и шестой 45 входы блока 20 управления соединены с первым 46 и вторым 47 выходами третьего 19 блока сравнения, вход 48 которого соединен с выходом 49
515
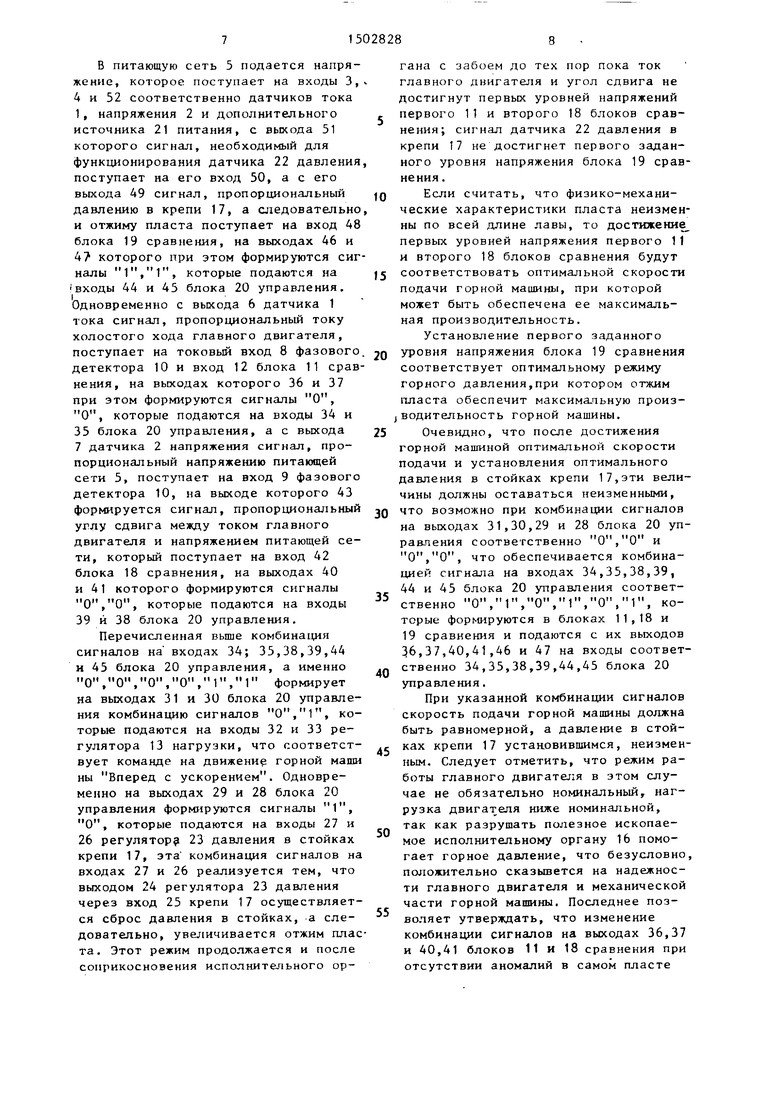
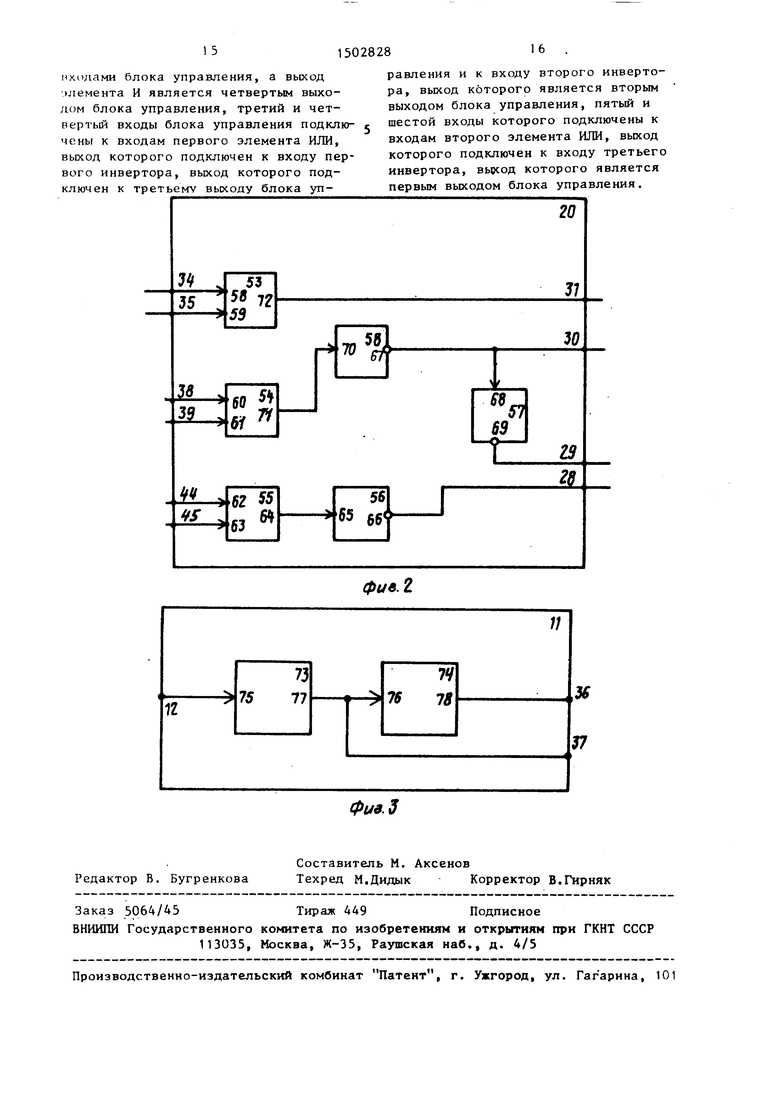
Клок 20 управления (фиг. 2) со- дефжит одни логический элемент И 53 два логических элемента ИШ 54 и 55 и три инвертора 56 - 58, причем элемент И 53 своим первым 58 и вторым 59 входами соединен с первым 34 и вторым 35 входами блока 20 управления, входы 60 и 61 первого элемента ИЛИ 54 соединены с третьим 38 и чет- вертым 39 входами блока 20 управления-, а входы 62 и 63 второго логического элемента ИЛИ 55 соединены с пятым 44 и шестым 45 входами блока 20 управления, выход 64 BTop(jro логического элемента ИЛИ 55 соединен с входом 65 первого инвертора 56, выход 66 которого соединен с первым 28 выходом блока 20 управления, второй выход 29 которого срединен с третьим выходом 30 блока 20 управления и выходом 67 третьего инвертора 58, через второй инвертор 57 - с входом 68 и выходом 69, вход 70 третьего инвертора 58 соединен с выхо- дом 71 первого логического элемента ИЛИ 54, а выход 72 логического элемента И 53 соединен с четвертым 31 выходом блока 20 управления.
Блок 11 сравнения содержит два по роговых элемента 73 и 74 с входами соответственно 75 и 76 и вькодами 77 и 78, причем вход первого порогового элемента 73 соединен с входом 12 блока 11 сравнения, первый выход 36 которого соединен с выходом 78 второго порогового элемента 74, вход которого 76 соединен с выходом 77 первого порогового элемента 73 и вторым выходом 37 блока 11 сравнения. Остальные блоки 18 и 19 сравнения конструктивно аналогичны блоку 11 сравнения. Разница их в том, что паспортные характеристики стабилитронов, уровни их срабатывания выбира- ются из известных, полученных расчетным путем, значений соответствующих величин для каждого принятого порога и уровня напряжения питающей сети.
Все узлы устройства являются стан дартными или набираются из элементов, выпускаемых промышленностью. Общепринятые, необходимые для работы элементы опущены в перечислении, но на.личие их предусмотрено при описании работы .устройства, к ним, в частности, относятся элементы настройки уровней пороговых элементов, цепи или элементы необходимой временной
д 5 0 5
g л .
5
286
задержки и фильтрукшцю цепи (Мкжоп сравнения. Иод регуляторам Haiруики понимается стандартный уяел управления цепной, гидравлической и.чи пневматической подачи горной машины, у которой при комбинации сигналов па его входах 32,,1 осущест 1яет- ся подача вперед с ускорением, т.е. увеличение нагрузки, при сигналах О, О равномерная подача вперед, т.е. установившаяся нагрузка, а при сигналах Г ,0 осуществляется сброс нагрузки, а при ) - стоп, подача назад.
Под регулятором давления понимается стандартный узел управления давления в стойках механизированной крепи, причем при комбинации сигналов на его входах 26,27 О,О давление в стойках максимальное, отжим пласта минимальнь1й, при сигналах 1,0 сброс давления в стойках, т.е. увеличение отжима пласта, при сигналах 0,Г увеличение давления в стойках гидрокрепи, т.е. уменьшение отжима пласта.
При описании работы устройства считается, что техническое состояние горной машины и крепи не имеет отклонений от нормы, дополнительный источник 21 питания подключен к сети независимо от главного двигателя, в период пуска главного двигателя датчик 1 тока зашунтирован, а пуск происходит вхолостую.
В качестве датчиков напряжения и тока могут быть использованы измерительные трансформаторы, а в качестве фазового детектора - известные устройства, построенные на интеграл микросхемах.
В описании работы устройства рассмотрены три уровня горного давления, хотя в принципе количество уровней может быть любым, что повлечет увеличение числа элементов в блоках сравнения, числа входов, а следовательно, и числа логических элементов в блоке управления. Необходимо заметить, что схема логических элементов, их количество и функциональные особенности могут быть любыми, но комбинация сигналов на выходах, при предлагаемой комбинации сигналов на входе, должна оставаться неизменной.
Способ управления горной машиной осуществляется с помощью предлага - мого устройства следующим образом.
В питающую сеть 5 подается напряжение, которое поступает на входы 3,ч 4 и 52 соответственно датчиков тока 1, напряжения 2 и дополнительного источника 21 питания, с выхода 51 которого сигнал, необходимый для функционирования датчика 22 давления, поступает на его вход 50, а с его выхода 49 сигнал, пропорциональный давлению в крепи 17, а следовательно, и отжиму пласта поступает на вход 48 блока 19 сравнения, на выходах 46 и 47 которого при этом формируются сигналы 1 , Г , которые подаются на входы 44 и 45 блока 20 управления. Одновременно с выхода 6 датчика 1 тока сигнал, пропорциональный току холостого хода главного двигателя, поступает на токовый вход 8 фазового детектора 10 и вход 12 блока 11 сравнения, на выходах которого 36 и 37 при этом формируются сигналы О, О, которые подаются на входы 34 и 35 блока 20 управления, а с выхода 7 датчика 2 напряжения сигнал, пропорциональный напряжению питающей сети 5, поступает на вход 9 фазового детектора 10, на выходе которого 43 формируется сигнал, пропорциональный углу сдвига между током главного двигателя и напряжением питающей сети, который поступает на вход 42 блока 18 сравнения, на выходах 40 и 41 которого формируются сигналы О,О, которые подаются на входы 39 и 38 блока 20 управления.
Перечисленная выше комбинация сигналов на входах 34; 35,38,39,44 и 45 блока 20 управления, а именно О,0,О,О,1,1 формирует на выходах 31 и 30 блока 20 управления комбинацию сигналов 0,1, которые подаются на входы 32 и 33 регулятора 13 нагрузки, что соответствует команде на движение горной маши ны Вперед с ускорением. Одновременно на выходах 29 и 28 блока 20 управления формируются сигналы 1, О, которые подаются на входы 27 и 26 регулятору 23 давления в стойках крепи 17, эта комбинация сигналов на входах 27 и 26 реализуется тем, что выходом 24 регулятора 23 давления через вход 25 крепи 17 осуществляется сброс давления в стойках, а следовательно, увеличивается отжим пласта. Этот режим продолжается и после соприкосновения исполнительного ор0
5
0
5
0
5
гана с забоем до тех пор пока ток главного двигателя и угол сдвига не достигнут первьк уровней напряжений первого 11 и второго 18 блоков сравнения; сигнал датчика 22 давления в крепи 17 не достигнет первого заданного уровня напряжения блока 19 сравнения,
Если считать, что физико-механические характеристики пласта неизменны по всей длине лавы, то достижение первых уровней напряжения первого 11 и второго 18 блоков сравнения будут соответствовать оптимальной скорости подачи горной машины, при которой может быть обеспечена ее максимальная производительность.
Установление первого заданного уровня напряжения блока 19 сравнения соответствует оптимальному режиму горного давления,при котором отжим пласта обеспечит максимальную произ- Jводительность горной машины.
Очевидно, что после достижения горной машиной оптимальной скорости подачи и установления оптимального давления в стойках крепи 17,эти величины должны оставаться неизменными, что возможно при комбинации сигналов на выходах 31,30,29 и 28 блока 20 управления соответственно О,О и О,О, что обеспечивается комбинацией сигнала на входах 34,35,38,39, 44 и 45 блока 20 управления соответственно 0,Г ,0,1
II II II 11 A t И 1 II
О
Г
ко0
5
0
5
торые формируются в блоках 11,18 и 19 сравнения и подаются с их выходов 36,37,40,41,46 и 47 на входы соответственно 34,35,38,39,44,45 блока 20 управления,
При указанной комбинации сигналов скорость подачи горной машины должна быть равномерной, а давление в стойках крепи 17 установившимся, неизменным. Следует отметить, что режим работы главного двигателя в этом случае не обязательно номинальньй, нагрузка двигателя ниже номинальной, так как разрушать полезное ископаемое исполнительному органу 16 помогает горное давление, что безусловно, положительно сказывется на надежности главного двигателя и механической части горной машины. Последнее позволяет утверждать, что изменение комбинации сигналов на выходах 36,37 и 40,41 блоков 11 и 18 сравнения при отсутствии аномалий в самом пласте
не будет происходить. Если крепость пласта возросла н нагрузка на двигатель увеличилась до номинальных значений тока и угла сдвига, то комбинация сигналов на выходах 36,37 и 40, А1 блоков 11 и 18 сравнения будет соответственно 1,1 и 1,Г ; эта комбинация подается на входы 34 35 и 38,39 блока 20 управления, что сформирует на его выходах 31,30 и
23 и соответствуют командам Равномерная подача исполнительного органа 16 и Установившееся давление в стойках крепи 17.
В том случае, когда отжим пласта превысил оптимальное значение, уровень величины сигнала, поступающего с выхода 49 датчика давления 22 на вход 48 блока 19 сравнения, достаточен для того, чтобы на выходах 44 и 45 блока 20 управления .формировались сигналы О,О, что приведет к формированию сигнала 0,1 на выходах 29 и 28 блока 20 управления и входах 27 и 26. регулятора 23 давления. Такая комбинация сигналов на входах 29 и 28 регулятора 23 давления соответствует команде Увеличение давления в стойках крепи 17, что приведет к уменьшению давления на пласт и уменьшение отжима пласта, что исключит самопроизвольное выпадение негабаритов н пласта и исключит непроизводительные затраты времени на их устранение.
Увеличение давления в стойках крепи приведет к увеличению тока
0
5
0
5
0
5
0
5
0
5
главного двигателя и соответственно к изменению угла сдвига межлу током и напряжением, причем изменение угла сдвига будет менее интенсивным в зависимости от выбранного оптимального режима работы главного днигате- ля и может оставаться практически неизменным в широких пределах изменения отжима пласта (зависимость коэффициента мощности от нагрузки имеет явно выраженный максимум и работа главного двигателя возможна как до, так и после экстремальной точки) Это обстоятельство может привести к двум возможным комбинациям сигналов на выходах 40 и 41 блока 18 сравнения и входах 38 и 39 блока 20 управления:
а)при работе двигателя с нагрузкой менее 0,6-0,7 от номинальной комбинация сигналов соответственно
II II ГЦ
I , J ,
б)при работе с нагрузкой более номинальной комбинация сигнала О,
О.
В обоих вышеуказанных случаях комбинация сигналов на выходах 36 и - 37 блока 11 сравнения, а следовательно, и на входах 34 и 35 блока 20 управления соответственно 1,1.
При комбинации сигналов, соответствующих а, на выходах 31 и 30 блока 20 управления и входах 32 и 33 регулятора 13 нагрузки формируются сигналы Г ,0, что соответствует команде Уменьшения нагрузки, а при комбинации сигналов, соответствующих б, на выходах 31 и 30 блока 20 управления и входах 32 и 33 регулятора 13 нагрузки формируются сигналы 1,1, что соответствует команде/ Стоп, назад регулятору 13 нагрузки. Остановка с последующим отходом исполнительного органа от забоя возвращает систему в исходное положение, так как давление в стойках крепи 7 поднимается до максимального и подача вперед начинается с режима холостого хода главного двигателя. Очевидно, что возникновение нестабильного движения горной машины будет указывать на то, что пороговые уровни блоков 11,18 и 19 сравнения выбраны с неточностями, что может быть устранено регулировкой их вспомогательных цепей (корректировкой пороговых уровней) .
Работа блока управления. При включении главного двигателя в сеть на входах 34,35,38,39,44 и 45 блока 20 управления формируются сигналы 0,0,0,0,1,1, которы подаются соответственно на входы 58 - 63 логических элементов И 53 и ИЛИ 54 и 55, на выходах 72,71 и 64 которьсх формируются сигналы соответственно 0,0,1. С выхода 72 сигнал О подается на вход 31 блока 20 управления, а с выхода 71 сигнал О подается на вход 70 инвертора 58, с выхода 67 которого сигнал 1 подается на выход 30 блока 20 управления и вход 68 инвертора 57, с выхода 69 которого сигнал О подается на выход 29 блока 20 управления, на входе 65. инвертора 56 сигнал 1, а на его выходе 66 сигнал О, который подается на выход 28 блока 20 управления.
Таким образом, сигналы на выходах 31,30 блока 20 управления соответственно 0,1, которые подаются на входы 32 и 33 регулятора 13 нагрузки, что соответствует команде движения исполнительного органа 16 Вперед с ускорением, одновременно сигналы 1,0 с выходов 29 и 28 блока 20 управления подаются на вход 27 и 26 регулятора 23 давления, эта комбинация сигналов соответствует команде Сброс давления в стойках крепи 17, что увеличивает отжим пласта.
После соприкосновения исполнительного органа с забоем, когда ток двигателя и угол сдвига еще не достигли первых уровней напряжений блоков 11 и 18 сравнения режим работы блока 20 управления аналогичен вышеописанному.
При достижении горной машиной первых заданных уровней напряжений блоков 11,18,19 сравнения режим ее работы и уровень давления в стойках крепи 17 будут оптимальными, обеспечи- ваю1цими максимальную производительность. При эток комбинация сигналов ; на входах 34, 35,39 и 44, 45 блока 20 управления соответственно О, 0,Г и . 0.Г , эта комбинация
сигналов подается на входы 58 - 63 логических элементов И 53 и ИЛИ 54 и 55. На выходе 72 логического элемента И 53 формируется сигнал О, который подается на выход 31 блока
0
5
0
5
0
5
0
5
0
5
20 упранления. На выходе 71 логического элемента ИЛИ 54 формируется сигнал Г , который подается на вход 70 инвертора 58, с выхода 67 которого сигнал О подается на выход 30 блока 20 управления и вход 68 второго инвертора 57, с выхода которого сигнал 1 подается на вход 29 блока 20 управления, одновременно с выхода 64 второго элемента ИЛИ 55 сигнал 1 подается на вход 28 блока 20 управления. Такая комбинация сигналов на выходах блока 20 управления приводит к равномерной подаче горной машины и дальнейшему увеличению отжима пласта, что разгружает двигатель, изменяет комбинацию сигналов на входах 60 и 61 логического элемента ИЛИ 54 на О,О, на его выходе 71 и входе 70 инвертора 58 на О и, следовательно, на выходе 30 блока 20 управления и входе 68 инвертора 57 на 1, а на его выходе 69 и входе 29 блока 20 управления на сигнал О. Полученная комбинация сигналов соответствует движению горной машины вперед с ускорением и установившемуся давлению в стойках крепи 17.
Если отжим пласта превысил оптимальный уровень, то на входах 44 и 45 блока 20 управления сигналы О, О, что формирует на выходе 64 элемента ИЛИ 55 сигнал О, который подается на вход 65 инвертора 56, с выхода которого 66 сигнал .1 подается на выход 28 блока 20 управления, с которого сигнал 1 подается на вход 26 регулятора 23 давления. Как видно из всего вышеизложенного сигнал.. на входе 26 регулятора 23 давления соответствует команде Увеличение давления в стойках крепи 17 при любой нагрузке главного двигателя. Если при этом ток главного двигателя превысил второй уровень напряжения сигналов на входах 12 и 42 блоков 11,18, сравнения, то на входах 34 и 35 блока 20 управления сформируются сигналы 1, а на входах 38 и 39 сигналы О (уменьшение угла сдвига при перегрузке плавного двигателя). Сигнал 1 подается на входы 58 и 59 логического элемента И 53, ас его выхода 72 сигнал 1 подается на выход 31 блока 20 управления. Со входов 38,39 и 44,45 блока 20 управления сигналы О подаются на входы 60 - 63 логических элементон или 5 и 53, с выходов которых 71 и 64 сиг-налы О подаются на входы 70 н 65 инверторов 58 и 56, с выходов 67 и 66 -которых сигналы 1 подаются на выходы 30 и 28 блока 20 управления, кроме того с нькода 67 инвертора 58 сигнал 1 полается на вход 63 инвертора 57, с выхода которого 69 сигнал О подается на выход 29 блока 20 управления. Комбинация сигналов 1 на выходах 31 и 30 блока 20 управления, а, следовательно, и на входах 32 и 33 рег улято ра 13 нагрузки соответствует команде Стоп, на:-ад.
Комбинация сигналов 0,1 на вькодах 29 и 28 блока 20 управления, а, следовательно, и на выходах 27 и 26 регулятора 23 давления, соответствует команде Увеличение давления в стойках Крепи 17. Таким образом, оптимизация уровня отжима пласта в общем виде описывается следующими выражениями: --
Z, (Х1 ЛХ ); ( ;
z f(.x :,); (х;
где Z, V Х-,) ,
Z - закон управления
закон управления подачей;
величиной отжима пласта за счет изменения давления в гидростойках крепи; X, - уровни тока статора главного двигателя; Xv - уровни угла сдвига между током главного двигателя и напряжением питающей сети; Ха - уровни давления в стойках механизированной крепи.
Формула изобретения
z, -(х;л х,);
( ; (xij V х;;) ;
закон управления подачей; закон упрлплеиип величиной отжима пласта за счет изменения ДЛВ,1СНИ в ГИДРОСЧ ОЙках крепи;
уровни тока статора главного двигателя;
уровни угла сдвига между током главного дви1-ателя и .. напряжением питающей сети; уровни давления в стойках механизированной крепи.
2г (); где Z, - Zo X;20
25
30
35
40
45
50
55
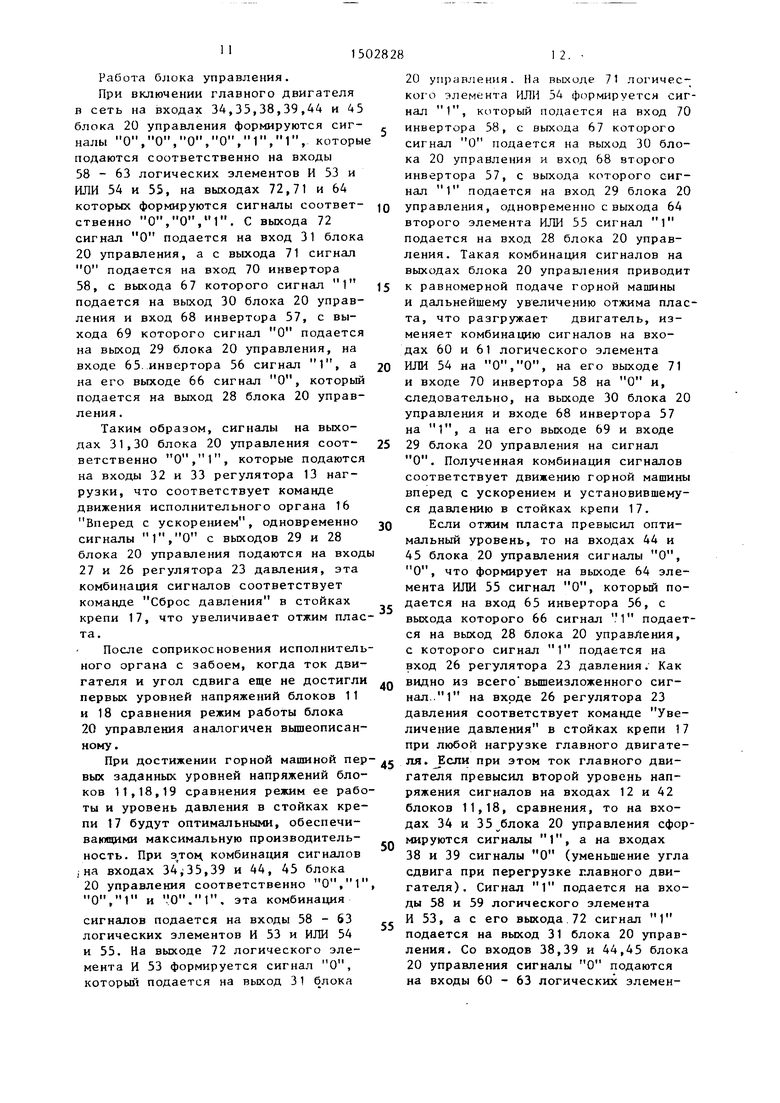
иходами блока управления, а выход (лемента И является четвертым выходом блока управления, третий и четвертый входы блока управления подклкг чены к входам первого элемента ИЛИ, выход которого подключен к входу первого инвертора, выход которого подключен к третьему выходу блока управления и к входу второго инвертора, выход которого является вторым выходом блока управления, пятый и шестой входы которого подключены к входам второго элемента ИЛИ, выход которого подключен к входу третьего инвертора, вьссод которого является первым выходом блока управления.
фие.2
| Гаврилов П.Д | |||
| и др | |||
| Автоматизация производственных процессов.-М.: Недра, 1985, с | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Авторское свидетельство СССР №1160034, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
