Изобретение относится к электротехнике, предназначено для питания статорных обмоток БДПТ и может быть использовано в электроприводах различных приборов, например магнитофонов, электропроигрывателей и цифровых лазерных проигрывателей.
Известен мостовой усилитель для управления БДПТ, в котором сигнал управления трехфазной статорной обмотки формируется в результате суммирования сигналов двух датчиков Холла (ДХ). Усилители сигналов ДХ имеют единичную передачу по синфазной компоненте входного сигнала, поэтому ток управления ДХ фиксирован на определенном уровне (т. е. отсутствует возможность регулировки амплитуды напряжения на статорной обмотке), так как задаваемый им статический потенциал определяет статический потенциал фазовых обмоток. Кроме того, известное устройство имеет независимые каналы усиления сигналов, что не обеспечивает симметричную раскачку напряжения на фазовых обмотках, а следовательно, не обеспечивает максимальную неискаженную амплитуду напряжения на нагрузке при заданном напряжении источника питания [1]
Известен мостовой усилитель для управления БДПТ, который является наиболее близким к предлагаемому устройству по своей сущности, оно содержит два дифференциальных усилителя (ДУ), инвертирующие входы которых соединены с выводами резистора, включенного между средними точками комплементарных цепочек, подключенных входами к выходам соответствующих ДУ. Статорная обмотка включена между выходами токовых зеркал, включенных последовательно с транзисторными ключами.
В устройстве в предконечном каскаде также используется ДУ с единичной передачей по синфазной составляющей, но в этом случае не используется для задания тока через статорные обмотки двигателя, а напряжение на нагрузке не контролируется. При этом синфазный потенциал коллекторных цепей токовых зеркал и транзисторных ключей не определен, что может привести при смещении синфазного потенциала относительно питания к ухудшению усилительных свойств транзисторных структур [2]
Статический синфазный потенциал эмиттеров входных транзисторов комплементарных цепочек определяется синфазным потенциалом, поступающим с ДХ, при смещении которого относительно середины напряжения питания возможен выход из активного режима работы транзисторных структур. Для предотвращения этого синфазный потенциал ДХ фиксируется с помощью стабилитрона.
Однако известное устройство-прототип работоспособно только при фиксированном токе управления ДХ, что резко сужает возможность его применения, и кроме того, при заданном напряжении питания оно не обеспечивает формирования максимальной неискаженной амплитуды питания статорных обмоток БДПТ из сигналов датчиков положения (в данном случае ДХ).
Задачей изобретения является снижение искажений выходного сигнала при повышении эффективности использования напряжения питания, а также обеспечение возможности изменения тока управления ДХ для регулирования амплитуды напряжения на статорных обмотках.
Поставленная задача решается в известном устройстве, содержащем два дифференциальных усилителя (ДУ), инверсные входы которых соединены с выводами входного резистора, и имеющем клеммы для подключения статорной обмотки БДПТ, путем введения третьего и четвертого ДУ, выходы которых соединены с прямыми входами соответственно первого и второго ДУ, и восемь резисторов. При этом первый и второй резисторы включены между входными клеммами и входами третьего ДУ, третий между инверсным, а четвертый между прямым входом третьего ДУ и выходами соответственно первого и второго ДУ. Пятый резистор включен между выходом третьего и инверсным входом четвертого ДУ. Выходы первого и второго ДУ подсоединены к клеммам для подключения статорной обмотки БДПТ, и соответственно через шестой и восьмой резисторы к своим инверсным входам. Кроме того, выход второго ДУ через седьмой резистор соединен с инверсным входом четвертого ДУ, прямой вход которого подключен к шине фиксированного питания. Причем отношение сопротивлений пятого и седьмого резисторов равно отношению сопротивлений восьмого и входного резисторов, а сопротивления восьмого и шестого резисторов равны.
Такое соотношение между сопротивлениями вновь введенных резисторов обеспечивает коэффициент усиления выходного каскада равным коэффициенту усиления инвертирующего усилителя, что гарантирует симметричную раскачку напряжения на статорной обмотке БДПТ относительно исходного синфазного уровня.
Кроме того, использование новой совокупности блоков, элементов и связей позволяет жестко фиксировать статический синфазный потенциал на зажимах нагрузки на уровне половины напряжения питания и тем самым обеспечить получение минимальной неискаженной амплитуды сигнала на нагрузке, что можно было бы достичь лишь при использовании для питания выходных каскадов дополнительного "плавающего" источника питания, что в свою очередь приводит к значительному усложнению устройства, ухудшению его массо-габаритных показателей, что крайне нежелательно при использовании автономных источников питания.
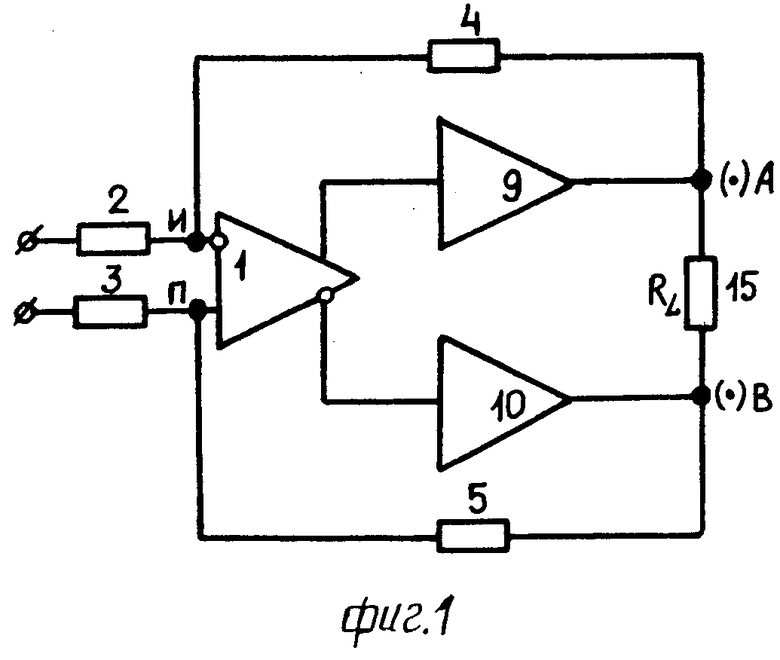
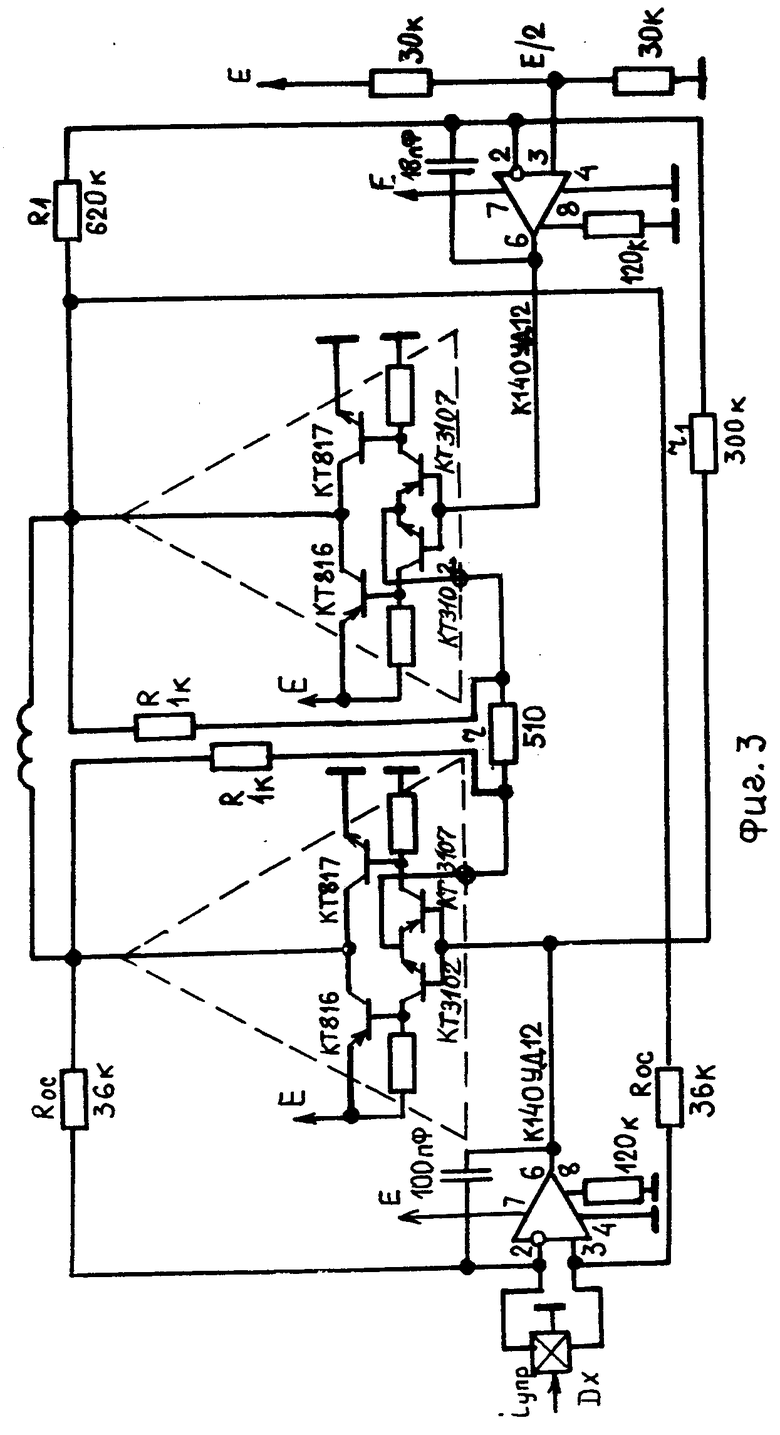
На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2, 3 пример его конкретного выполнения.
Предлагаемое устройство (фиг. 2) содержит дифференциальный усилитель ДУ1, коэффициент усиления которого задается резисторами 2, 3 и резисторами 4, 5 обратной связи, ДУ6, который инверсным входом подключен через резистор 7 к выходу ДУ1, а прямым к шине 8 фиксированного потенциала. Выходной каскад на ДУ 9 и ДУ10 представляет собой мостовой дифференциальный двухтактный каскад с парафазным выходом и единичной передачей по синфазному входному напряжению. При этом инверсные входы ДУ9 и ДУ10 через резисторы 11 и 12 соответственно соединены с выходами ДУ9 и ДУ10, а через входной резистор 13 между собой. Выход ДУ10 через резистор 14 подключен к инверсному входу ДУ6. Выходы ДУ9 и ДУ10 соединены с клеммами 15, 16 для подключения статорной обмотки БДПТ (на фиг. 1 точки (.)А и (.)В).
Предлагаемое устройство работает следующим образом.
При подаче напряжения питания Е от общего источника на неинвертирующем входе ДУ6 через шину 8 фиксированного питания (например, при помощи делителя напряжения, как на фиг. 3) устанавливается потенциал Е/2. Такой же потенциал установится и в точках (.)А и (.)В) (на клеммах 15, 16).
При подаче на вход устройства дифференциального напряжения V1х (например, с выхода датчика Холла, как на фиг.2), напряжение между входами ДУ1 будет равно 0, при этом суммарное падение напряжения на резисторах 2 и 3 должно быть равно V1х. Предложим, что входное напряжение приложено положительной полярностью к инвертирующему входу ДУ) (И вход), а отрицательной полярностью к неинвертирующему входу ДУ1 (П вход). При этом выходное напряжение ДУ1 начинает уменьшаться относительно исходного статического потенциала Е/2. С выхода ДУ1 сигнал поступает на неинвертирующий вход ДУ9, в результате чего его выходное напряжение также уменьшается относительно исходного статического потенциала Е/2. Этот же сигнал с выхода ДУ1 через резистор 7 поступает на инвертирующий вход ДУ6, выходное напряжение которого начинает увеличиваться относительно исходного потенциала Е/2 и соответственно растет напряжение на выходе ДУ10. Симметрия "раскачки" напряжения на нагрузке относительно Е/2 достигается за счет действия перекрестных обратных связей через резисторы 4, 5.
Таким образом, в устройстве реализованы два канала усиления сигнала с выхода ДУ1 на нагрузку инвертирующий и неинвертирующий. Причем коэффициент усиления К1 инвертирующего канала определяется отношением сопротивления резисторов 7, 14, а неинвертирующего К2 отношением сопротивлений резисторов 11, 13.
Однако неравенство коэффициентов передачи этих каналов может привести к нарушению симметрии "раскачки" напряжения на нагрузке, даже несмотря на действие перекрестных ООС. Чтобы обеспечить равенство коэффициентов передачи К1 К2, необходимо, чтобы отношение сопротивлений резисторов 7, 14 и 11, 3 было равным. С другой стороны, для сохранения симметрии возбуждения выходных ДУ9 и ДУ10 отношения сопротивлений резисторов 11 и 13 и резисторов 12, 13 также должны быть равны. Поскольку выходные ДУ9 и ДУ10 имеют коэффициент усиления больше единицы, то "клипинг" этих усилителей наступил раньше, чем ДУ1 и 6. Поэтому при входе в "клипинг" одного из ДУ9 или 10 работающий усилитель будет управляться неискаженным сигналом с выхода ДУ1.
Принципиальная схема (фиг. 3) мостового усилителя постоянного тока для управления БДПТ, приведенная в качестве примера конкретного выполнения устройства, усиливает сигналы датчиков Холла (в качестве датчиков положения могут быть использованы также другие магниточувствительные элементы магнитотранзисторы и др.).
Выходной каскад мостового усилителя на ДУ9 и 10 имеет минимальную величину напряжения насыщения и выполнен по двухтактной комплементарной схеме. При этом коэффициент усиления выходной усилительной ступени по дифференциальному сигналу, определяемый резисторами R и r (К K  ) равен коэффициенту усиления (К1 K1=
) равен коэффициенту усиления (К1 K1=  ) инвертирующего ДУ, определяемому отношением сопротивлений резисторов R1 и r1.
) инвертирующего ДУ, определяемому отношением сопротивлений резисторов R1 и r1.
Таким образом, предлагаемое техническое решение обеспечивает симметричную "раскачку" напряжения на статорной обмотке БДПТ относительно жестко фиксированной величины опорного потенциала, равного половине напряжения питания, что позволяет получить максимально возможную неискаженную амплитуду напряжения на нагрузке при заданном напряжении Е однополярного источника питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫХОДНОЙ КАСКАД УСИЛИТЕЛЯ | 1991 |
|
RU2094942C1 |
| Бесконтактный электродвигатель постоянного тока | 1991 |
|
SU1838865A3 |
| УСТРОЙСТВО ПОДДЕРЖАНИЯ РЕЖИМА РАБОТЫ ПО ПОСТОЯННОМУ ТОКУ УСИЛИТЕЛЯ | 2001 |
|
RU2207712C2 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО С ГАЗОРАЗРЯДНОЙ ЛАМПОЙ ПОСТОЯННОГО ТОКА | 1994 |
|
RU2068627C1 |
| ИЗМЕРИТЕЛЬНЫЙ ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ | 1992 |
|
RU2054790C1 |
| ИЗМЕРИТЕЛЬНЫЙ ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ | 1993 |
|
RU2057392C1 |
| ИЗМЕРИТЕЛЬНЫЙ ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ | 1993 |
|
RU2060580C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОЧИСТНОГО ПОРШНЯ В ТРУБОПРОВОДЕ | 1995 |
|
RU2123896C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ СЛЕПЫХ | 1993 |
|
RU2049455C1 |
| СТАБИЛИЗАТОР ПОСТОЯННОГО ТОКА | 1991 |
|
RU2024917C1 |
Использование: в электроприводах различных приборов, например магнитофонов, электропроигрывателей и цифровых лазерных проигрывателей. Сущность: мостовой усилитель постоянного тока для управления бесконтактным двигателем постоянного тока содержит входной дифференциальный усилитель 1, коэффициент усиления которого задается входными резисторами 2 и 3 и резисторами обратной связи 4 и 5, инвертирующий дифференциальный усилитель 6, который инверсным входом через резистор 7 подключен к выходу входного дифференциального усилителя, а прямым к шине фиксированного питания, выходной каскад на двух дифференциальных усилителях 9 и 10 выполнен в виде мостового дифференциального двухтактного каскада с парафазным выходом и единичной передачей по синфазному входному напряжению. Это позволяет при сохранении симметрии каналов мостового усилителя путем жесткой фиксации статического потенциала на зажимах нагрузки получить максимальный неискаженный сигнал при использовании только одного источника питания. 3 ил.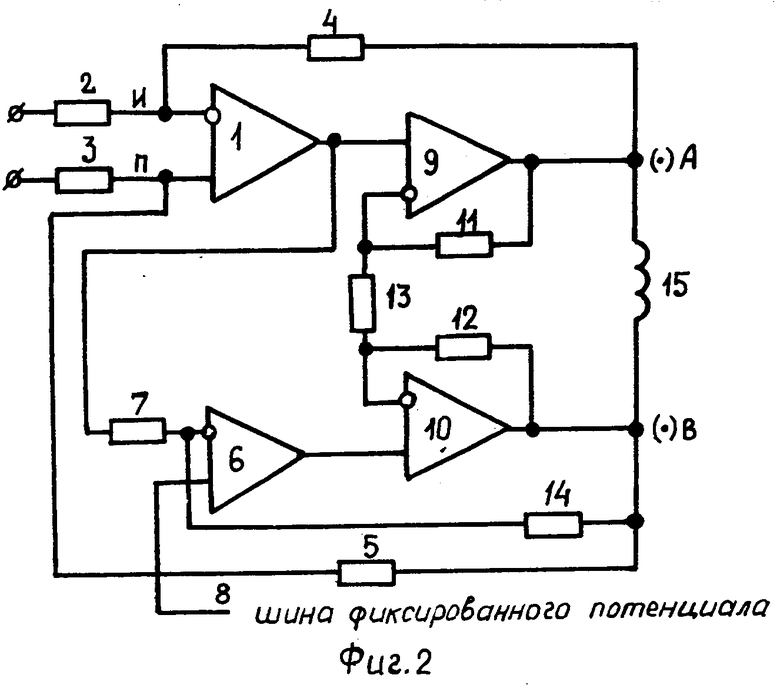
МОСТОВОЙ УСИЛИТЕЛЬ ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА, содержащий два дифференциальных усилителя, инверсные входы которых соединены с выводами входного резистора, и имеющий клеммы для подключения статорной обмотки бесконтактного двигателя постоянного тока, отличающийся тем, что в него введены третий и четвертый дифференциальные усилители, выходами соединенные с прямыми входами соответственно первого и второго дифференциальных усилителей, и восемь резисторов, первый и второй из которых включены между входными клеммами и входами третьего дифференциального усилителя, третий между инверсным входом третьего и выходом первого дифференциальных усилителей, а четвертый между прямым входом третьего и выходом второго дифференциальных усилителей, пятый резистор включен между выходом третьего и инверсным входом четвертого дифференциальных усилителей, выход второго дифференциального усилителя соединен с одной клеммой для подключения статорной обмотки бесконтактного двигателя постоянного тока, через шестой резистор со своим инверсным входом, а через седьмой с инверсным входом четвертого дифференциального усилителя, прямой вход которого подключен к шине фиксированного питания, восьмой резистор включен между инверсным входом и выходом первого дифференциального усилителя, который соединен с другой клеммой для подключения статорной обмотки бесконтактного двигателя постоянного тока, причем отношение сопротивлений пятого и седьмого резисторов равно отношению сопротивлений восьмого и входного резисторов, а сопротивления восьмого и шестого резисторов равны.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
