Изобретение относится к ортодонтии, предназначено для устранения аномалий прикуса, зубного ряда и положения отдельных зубов путем ретракции последних (перемещение зубов в сторону рта) и путем применения дополнительных ортодонтических действий.
Известны устройства ретракторы, содержащие небную пластинку и ретракционную дугу. Недостатком подобного устройства является то, что оно, наряду с развиваемой активной нагрузкой на фронтальные зубы, вызывает реактивную нагрузку на задние зубы. Реактивная нагрузка может привести к нежелательному смещению задних зубов в губную сторону.
Этого недостатка лишены ортодонтические аппараты внеротового действия, поскольку реактивная нагрузка в них распределена на элементах теменной и затылочной опор. Кроме того, это устройство содержит элементы внеротовой тяги, фронтальную опору и элемент связи с зубным рядом, между которым и затылочной опорой установлена силовая связь. При этом фронтальная опора, выполненная как лицевая дуга, протянута по линии губ и режущего края фронтальных зубов, что вызывает для последних значительный опрокидывающий момент возникает опасность травмы сосудисто-нервного пучка у верхушки корня зуба.
Известный ортодонтический аппарат для лечения протруссии верхней челюсти лишен этого недостатка, поскольку содержащая в нем фронтальная опора выполнена по линии огибающей середину верхней губы пациента. При этом места прикрепления элементов внеротовой тяги выносятся в пространство между носом и губой пациента. Этот аппарат является наиболее близким по технической сущности к заявляемому устройству. Он содержит помимо фронтальной опоры и элементов внеротовой тяги элементы теменной и затылочной опор, кроме того элементы связи с зубным рядом. Недостатком прототипа является то, что элементы внеротовой тяги контактируют с кожей лица пациента, а при подвижности мышц лица может произойти смещение внеротовой тяги, а следовательно, отклонение вектора развиваемой ею силовой нагрузки. Соответственно увеличивается вероятность побочных действий ортодонтического лечения. Функциональные возможности прототипа ограничены лишь областью воздействия на фронтальные зубы верхней челюсти. Развиваемая при этом ортодонтическая нагрузка носит сугубо статический характер, что недостаточно эффективно для оптимизации лечебного процесса.
Целью изобретения является исключение указанных недостатков.
Это достигается благодаря тому, что устройство содержит жесткую внеротовую базу, на которой закреплены теменная, фронтальная опоры, установлены узлы формирования и индикации статической и динамической нагрузок, при этом узел формирования и индикации статической нагрузки связан с затылочной опорой. Кроме того, узел связи с зубным рядом выполнен в виде сменного модуля. Узел формирования и индикации статической нагрузки содержит корпус с расположенными внутри его направляющими; по образующей корпуса уложены входные торцы световодов; на направляющих установлен с возможностью перемещения вдоль входных торцов световодов подпружиненный упор с источником света, выходные торцы световодов выведены на световое табло; на корпусе размещены два регулировочных кольца, одно из которых связано с индикатором нулевого положения, а другое сопряжено с подпружиненным упором. Узел формирования и индикации динамической нагрузки содержит установленную в затылочной опоре ось со шкивами, один из шкивов соединен со счетчиком циклов, а через шкивы перекинуты внеротовые тяги, одними концами закрепленные на внеротовой базе, а другими концами через динамометры соединенные с рукоятками, в которых размещены сенсорные переключатели, связанные с блоком сенсомоторных команд. При устранении губного положения фронтальных зубов верхней челюсти сменный модуль выполнен в виде коронки с отверстиями, через которые протянута фронтальная опора. При устранении губного положения резцов верхней челюсти сменный модуль выполнен в виде бандажного кольца, пропущенного через окно опорной рамки, которое сформировано продольными образующими рамки и поперечными втулками, закрепленными на рамке и содержащими проволочный контур, опорная рамка прикреплена к сагиттальной втулке, соединенной с фронтальной опорой, через сагиттальную втулку протянут тросик, связанный с регулировочным элементом, а концы тросика, огибающие боковые образующие рамки, соединены с бандажным кольцом.
При устранении аномалий губного положения третьего зуба верхней челюсти сменный модуль содержит вестибулярный прижим, соединенный с фронтальной опорой, апроксимальный и небный прижимы, апроксимальный прижим образован двумя сторонами трехгранной коронки, которая установлена базе с возможностью перемещения в ее плоскости, а вестибулярный и небный прижимы размещены на базе внутри коронки, причем вестибулярный прижим жестко закреплен на базе и через регулируемую тягу связан с одним из углов коронки.
При дистальном перемещении четвертого зуба верхней челюсти сменный модуль выполнен в виде двух половин одной коронки, на противоположных сторонах которых закреплена фронтальная опора с установленным на ней регулировочным элементом.
При устранении обратного перекрытия верхних фронтальных зубов нижними сменный модуль содержит узел для разобщения прикуса, установленный на внеротовой базе, и узел для ретракции нижних резцов, который выполнен в виде нижнечелюстной базы и толкателя; нижнечелюстная база через парные втулки, прикрепленные к ней соединена с фронтальной опорой, а толкатель сформирован изгибом фронтальной опоры у нижнего края парных втулок. Узел для разобщения прикуса выполнен в виде направляющего элемента, установленного на несущем стержне с возможностью поворота вокруг оси, размещенной на продольной образующей рамки, поворотно закрепленной на внеротовой базе, при этом несущий стержень расположен с возможностью перемещения вдоль поперечных образующих рамки и соединен с внеротовыми тягами узла формирования и индикации динамической нагрузки.
При формировании управляемой нагрузки, развиваемой жевательными мышцами, узел для разобщения прикуса выполнен в виде штока с опорным элементом, установленного на внеротовой базе с возможностью перемещения в сторону рта, причем на штоке расположен регулируемый ограничитель хода и контактный элемент, взаимодействующий с микровыключателем, связанным с блоком сенсомоторных команд.
Таким образом, в устройстве действует две нагрузки: статическая и динамическая. С позиции биомеханики такое воздействие на твердый биологический объект является более эффективным, чем воздействие одного компонента нагрузки.
Расположение модулей на жесткой внеротовой базе способствует стабильности нагрузки в заданном направлении.
Каждый модуль передает нагрузку, формируемую в устройстве с минимизацией побочных действий традиционного нагружения, т.е. уменьшается возможность травмы сосудисто-нервного пучка у верхушки корня перемещаемого зуба. Выполнение узла связи с зубным рядом в виде сменного модуля расширяет функциональные возможности устройства, так как действие устройства распространяется на большой ряд различных аномальных объектов.
На фиг.1 показаны основные узлы предлагаемого устройства; на фиг.2 узел формирования и индикации статической нагрузки; на фиг.3 узел связи с зубным рядом коронка; на фиг.4 узел связи с зубным рядом при губном положении резцов верхней челюсти; на фиг.5 узел связи с зубным рядом при губном положении зуба верхней челюсти; на фиг.6 узел связи с зубным рядом в случае дистального перемещения четвертого зуба верхней челюсти; на фиг.7 узел связи с зубными рядами при обратном перекрытии фронтальных зубов верхней челюсти нижними зубами; на фиг. 8 узел управляемой связи с зубным рядом в случае обратного перекрытия фронтальных зубов верхней челюсти нижними зубами.
Предлагаемое устройство (фиг.1) содержит внеротовую базу 1, выполненную, например, в виде жесткого кольца, на котором закреплены навесные узлы и детали: фронтальная опора 2, элементы теменной опоры 3, узлы формирования и индикации статической и динамической нагрузок. Конфигурация фронтальной опоры 2, например проволочной петли, зависит от конструкции того или иного узла связи 4 с зубным рядом, который соединен с фронтальной опорой 2. Элементы теменной опоры 3, например, ленты, закрепленные одними концами на внеротовой базе 1, другими концами собраны вместе на регулировочном приспособлении.
Узел формирования и индикации статической нагрузки содержит тубус 5, имеющий наружный торец, в виде встроенного светового табло 6. Тубус содержит три продольные прорези 7, на наружной поверхности выполнена резьба, на которую навинчены регулировочные кольца 8 и 9. На торце тубуса 5, обращенном в сторону внеротовой базы 1 имеется прилив (не показан), с помощью которого тубус 5 жестко присоединен к внеротовой базе 1. На этом же торце имеется три параллельные втулки, через которые во внутрь тубуса 5 введены три направляющих стержня 10, установленных под продольными прорезями 7. Направляющие 10 содержат посаженные на них пружины 11, ограниченные выступами 12 и подпружиненным упором 13, установленным с возможностью скольжения вдоль направляющих стержней 10. Этот упор имеет три лепестка 14, которые установлены в продольных прорезях 7 под регулировочным кольцом 8. К подпружиненному упору 13 жестко присоединена микролампа 15, связанная с контактным датчиком (не показан). Вдоль трассы возможного перемещения микролампы 15 по образующей тубуса 5 расположены входные торцы световодов с регулярной укладкой оптических волокон, их выходные торцы 16 формируют световое табло 6. Концы направляющих стержней 10 имеют жесткую заделку в подложке 17 элементов затылочной опоры, в ней же жестко установлен поводок 18, упирающийся в кромку регулировочного кольца 9. Подложка 17 соединена осевым шарниром (не показан) с затылочной опорой 19, в которой встроен вышеупомянутый контактный датчик.
Узел формирования динамической нагрузки содержит опорную ось 20, пропущенную через осевой шарнир, на концах этой оси имеются шкивы 21, в контакте с одним из них размещен счетчик циклов 22, через шкивы 21 перекинуты элементы внеротовой тяги 23, один конец каждого элемента закреплен на ушке втулки 24, сама же втулка 24 установлена на внеротовой базе 1, другой конец элемента 23 входит в регулировочную катушку 25, корпус которой совмещен с динамометром 26. Два динамометра 26 жестко соединены с двумя рукоятками 27, каждая из которых содержит сенсорный переключатель (не показан), соединенный с блоком сенсомоторных команд 28. Этот электронный прибор имеет на лицевой плате четыре светодиода. Три из них включены в канал прямой связи, а один в канал обратной связи управления нагрузкой.
Узел связи с зубным рядом 4 в случае протруссии фронтальных зубов верхней челюсти выполнен в виде коронки 29 (фиг.3), имеющей отверстия 30, через которые проведена фронтальная опора 2.
Узел связи с зубным рядом при губном положении резцов верхней челюсти (фиг. 4) содержит бандажное кольцо 31 из тонкой металлической ленты, к нему присоединены два конца тросика 32, охватывающего боковые образующие опорной рамки 33, а к продольным образующим опорной рамки присоединены две поперечные втулки 34, ограничивающие окно, через которое протянуто бандажное кольцо 31. Тросик 32 подведен под поперечные втулки 34 и в виде петли протянут через закрепленную на опорной рамке 33 сагиттальную втулку 35. На конце петля тросика 32 закреплена в элементе регулировки 36. К сагиттальной втулке 35 прикреплены элементы соединения 37 с фронтальной опорой 2. В поперечные втулки 34 введен проволочный контур 38.
Узел связи с зубным рядом при губном положении третьего зуба верхней челюсти (фиг.5) содержит базу 39, например, в виде шайбы, через ее отверстие пропущен винт (не показан), с помощью которого к базе 39 присоединен вестибулярный прижим 40, расположенный внутри апроксимального прижима 41, выполненного в виде трехгранной коронки, две апроксимальные грани которого и формируют апроксимальный прижим 41. На донной части коронки сделана выборка 42. Коронка расположена на базе 29 с возможностью перемещения в ее плоскости. Небный прижим 43 установлен на эластичных растяжках, которые присоединены к базе 39, причем передние растяжки перекинуты через вестибулярный прижим 40, который через промежуточный элемент 45 жестко соединен с фланцем 46. Промежуточный элемент 45 выполнен по линии огибающей середину верхней губы пациента. На фланце 46 имеются разъемы 47 для присоединения к фронтальной опоре 2 и отверстие 48, сквозь которое пропущена петля 49. Тяга 49 огибает наружную часть коронки 41 и через хомутик 50 подходит к наружным частям вестибулярного прижима 40.
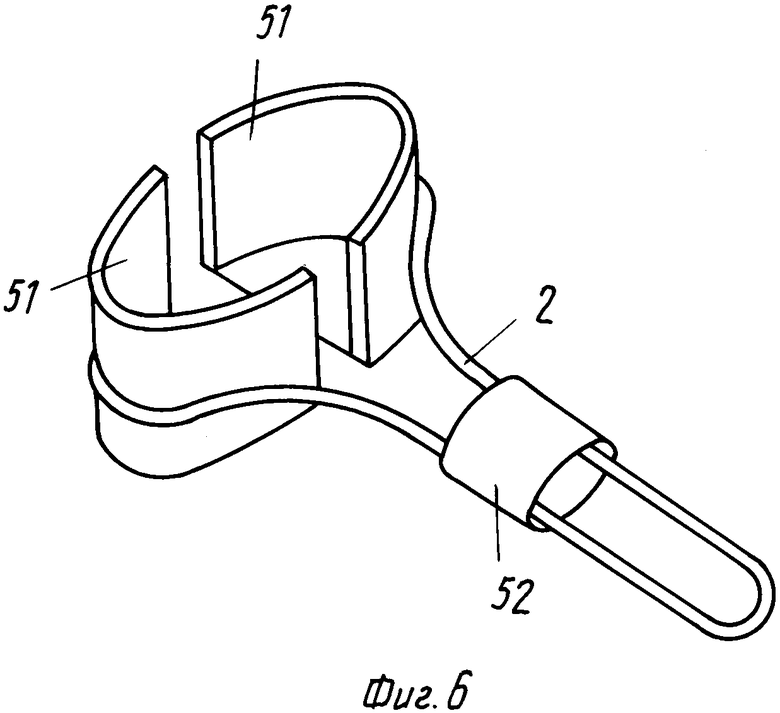
Узел связи с зубным рядом в случае дистального перемещения четвертого зуба верхней челюсти (фиг.6) содержит два захвата 51, выполненного как две половины продольно распиленной зубной коронки четвертого зуба верхней челюсти. Захваты соединены с фронтальной опорой 2, на которой расположена стяжка 52, имеющая возможность перемещения вдоль фронтальной опоры 2.
Узел связи 4 с зубными рядами при обратном перекрытии фронтальных зубов верхней челюсти нижними зубами (фиг.7) содержит узел для ретракции нижних зубов и узел для разобщения прикуса. В узле для разобщения прикуса имеется направляющий элемент 53. Он выполнен, например, из проволоки, петля которой изогнута по небной поверхности центрального резца верхней челюсти и упирается в его режущий край. Нижний конец направляющего элемента жестко соединен с втулкой 54, выполненной с возможностью вращения на не несущем стержне 55. Несущий стержень 55 завершается жестким соединением с двумя вертикальными втулками 56, имеющими крючки (цифрой не обозначены). Эти втулки посажены с возможностью перемещения на боковые образующие прямоугольной рамки 57, а ее верхняя продольная образующая введена во втулки 24, закрепляющиеся на внеротовой базе 1.
Узел для ретракции нижних зубов содержит нижнечелюстную базу 58, выполненную в виде слепочной ложки с присоединенными (фиг.7) парными втулками 59. В парные втулки 59 введена фронтальная опора 2, завершающаяся изгибом. Изгиб, расположенный у нижнего края втулок 59 представляет собой толкатель 60. Между втулками 59 на нижнечелюстной базе 58 сделана выборка (цифровой не обозначена). Расположение узлов таково, что элемент 53 свободно устанавливается в просвете фронтальной опоры 2 и опирается на верхнюю продольную образующую прямоугольной рамки 57.
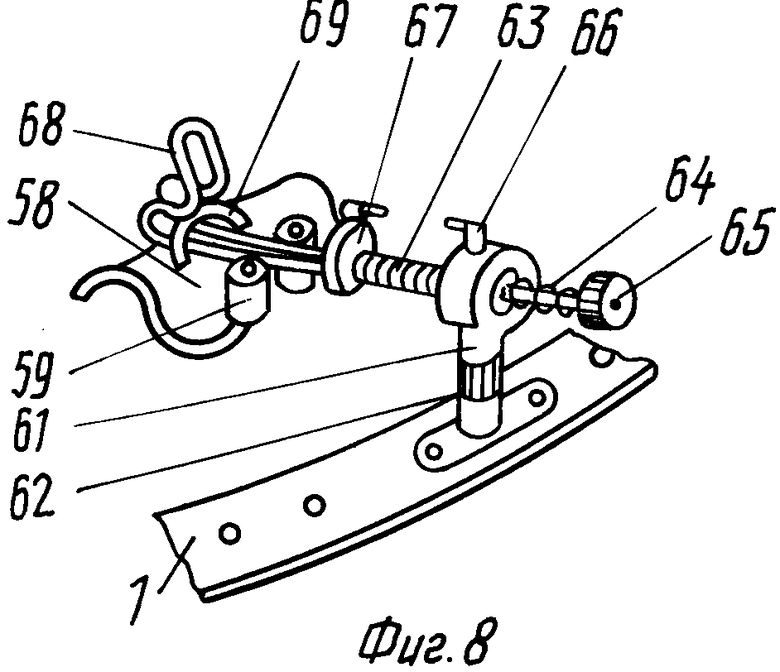
В случае управляемой связи с зубным рядом узел для разобщения прикуса установлен на внеротовой базе 1 (фиг.8) над фронтальной опорой 2 (на фиг.8 не показана с помощью опоры, содержащей направляющую головку 61 и регулятор положения 62 этой головки. В направляющую головку 61 введен шток 63 с резьбой. На шток 63 помещена пружина 64, поджатая регулировочной гайкой 65. На направляющей головке 61 закреплен микровыключатель 66, в контакт с которым на штоке 63 помещена регулировочная гайка 67. Шток 63 завершается опорными элементами 68, огибающим стойку 69, закрепленную на нижнечелюстной базе 58.
Предлагаемое устройство работает следующим образом. Для устранения протруссии (губного положения фронтальных зубов верхней челюсти в качестве модуля используется коронка 29 (фиг.3) и основные рабочие узлы (фиг.1). Коронку 29 без цементировки устанавливают на зуб, подлежащий перемещению, например, первый правый зуб (1 ). На внеротовой базе 1 закрепляют фронтальную опору 2 таким образом, чтобы пришеечная область первого зуба вписывалась в плоскость внеротовой базы 1. При этом регулируют натяжение элементов опоры 3 по голове пациента и длину элементов внеротовой тяги 23 по длине его рук. Формирование статической нагрузки начинают с манипуляции регулировочным кольцом 9, кромка которого давит на поводок 18, смещающий подложку 17 с затылочной опоры 19 к затылку пациента, при этом срабатывает датчик (не показан) и на световом табло 6 появляется точка засветки выходного торца световода 16. Дальнейшую манипуляцию производят регулировочным кольцом 8, добиваясь дозированного сжатия пружины 11, а индикацию величины нагрузки осуществляют по световому табло 6, на котором является засветка соответствующих выходных торцов световодов 16. Элементы внеротовой тяги 23 присоединяют к ушкам втулок 24. При периодическом натяжении внеротовой тяги 23, производимой пациентом при помощи ручек 27, происходит смещение внеротовой базы 1 относительно затылочной опоры 19, при этом фронтальная опора 2 с коронкой 29 оказывает на перемещаемый зуб ретракционное действие. Это динамическое воздействие, происходящее на фоне статической нагрузки, управляется блоком сенсомоторных команд 28. Блок 28 заранее отрегулирован и задает пациенту программу ритма работы руками: сигналы последовательного включения светодиодов (канала прямой связи) показывают период нарастания нагрузки, период ее экспозиции и период ее сброса. Показания динамометра 26 и счетчика циклов 22 служит информацией ортодонту. Таким образом, пациент пользуется устройством с установленной статической нагрузкой, например, 2-3 ч в день в течение 1-2 месяцев. Действие статической нагрузки усиливает действие динамической нагрузки, осуществляемой в виде сеансов под наблюдением врача. Вместо коронки 29 может быть использован узел, показанный на фиг.4. При этом бандажное кольцо 31 одевают на первый зуб 1 и затягивают, манипулируя элементом регулировки 36, который подтягивает тросик 32. После чего из ортодонтической проволоки формируют элемент 38 по контурам десневого края одного или нескольких передних зубов (в зависимости от показаний, с вестибулярной стороны, а у режущего края проволока переходит на небную поверхность этого зуба (1 ). Проволочный элемент 38 входит в поперечные втулки 34. Посредством элементов 37 этот узел соединяется с фронтальной опорой 2, которую закрепляют на внеротовой базе 1, затем выполняют действия аналогичные вышеописанным.
При этом узлы формирования и индикации нагрузок через внеротовую базу 1 оказывают давление на фронтальную опору 2. От фронтальной опоры 2 давление через втулки 36 и сагиттальную втулку 35 передается на опорную рамку 33, а от нее на зуб, на котором помещенo бандажное кольцо 31 и на проволочный элемент 38, помещенный в поперечные втулки 34. Элемент 38 в зависимости от конфигурации передает давление на пришеечную часть одного или нескольких зубов. Таким образом лечебная нагрузка направлена в сторону рта.
Пpи губном положении третьего верхнего зуба применяют узел, показанный на фиг. 5. Предварительная подгонка узла к зубу заключается в том, что вестибулярный 40, апроксимальный 41 и небный 43 прижимы устанавливают на соответствующих анатомических участках зуба. Трехгранную коронку 41, выполненную как апроксимальный прижим, одевают на зуб, а растяжки 44 подтягивают к базе 39, после чего на фланце 46 регулируют тягу 49 (это может быть сделано с помощью приспособления, аналогичного элементу регулировки тяги 36, показанному на фиг.4) при этом апроксимальный прижим 41 смещается в сторону вестибулярного прижима 40 и охватывает зуб с апроксимальных сторон, после чего в разъемы 47 вводят фронтальную опору 2 и присоединяют ее к внеротовой базе 1 таким образом, чтобы пришеечная часть перемещаемого зуба вписывалась в плоскость внеротовой базы 1.
Формирование статической нагрузки, а также другие лечебные действия производят аналогично действиям, производимым в клинических случаях. При этом фронтальная опора 2 передает давление через промежуточные элементы 45 на вестибулярный прижим 40, который нагружает зуб, смещая его в зубной ряд. В случае клинических показаний к дистальному перемещению четвертого верхнего зуба, например, на место удаленного пятого молочного зуба, применяют узел, показанный на фиг.6. Захваты 51 устанавливают с щечной и небной сторон четвертого зуба, стяжку 52 смещают в его сторону до состояния фиксации узла на зубе, затем фронтальную опору 2 соединяют с внеротовой базой 1. После чего формируют нагрузки, оказывающие давление на фронтальную опору 2. От фронтальной опоры 2 давление передается на захваты 51, смещающие четвертый верхний зуб на место удаленного пятого молочного зуба.
В случае проявления аномалии обратного перекрытия верхних зубов нижними применяются два узла (фиг.7), устанавливающиеся на внеротовой базе 1: узел для разобщения прикуса удерживают на втулках 24, в которые вводят прямоугольную рамку 57, а на ушках этих втулок закрепляют концы элементов внеротовой тяги 23, которую перебрасывают через крючки втулок 56. Длину элементов тяги 23 регулируют в катушках 25 по длине рук пациента. Узел для ретракции нижних зубов устанавливают так, что направляющий элемент 53 находился в просвете контура фронтальной опоры 2. Нижнечелюстную базу 58 устанавливают на жевательной поверхности зубного ряда нижней челюсти, а толкатель 60 подводят к вестибулярнопришеечной части нижнего резца, а затем регулируют элементы теменной опоры 3 и формируют статическую нагрузку (аналогично описанному), на фоне статической нагрузки происходит формирование динамической нагрузки аналогично описанным случаям. При действии статической нагрузки внеротовая база 1 смещается по направлению к затылочной опоре 19, а фронтальная опора 2 с толкателем 60 оказывает ретракционное действие на нижний резец. Динамическая нагрузка приводит в действие рычажный механизм узла для разобщения прикуса. При этом направляющий элемент 53, как рычаг с осью опоры на продольной образующей прямоугольной рамки 57, поворачивается и оказывает давление на верхний резец, смещая его в губную сторону, так как при этом ось опоры элемента 53 испытывает реактивное действие, передающееся на внеротовую базу 1 и закрепленную на ней фронтальную опору 2 с ее толкателем 60. Таким образом, ретракционное действие толкателя 60 на нижний резец усиливается. В этом процессе присутствуют компоненты в виде периодического сокращения жевательных мышц, силу которых можно управлять с помощью узла управляемой связи с зубным рядом (фиг.8).
Для установки этого узла узел для разобщения прикуса, содержащий прямоугольную рамку снимают, а узел, показанный на фиг.8, закрепляют на внеротовой базе 1, устанавливая его поверх фронтальной опоры 2 (на фиг.8 не показана). Шток 63 соединяют с нижнечелюстной базой 58, при этом закрепленная на ней стойка 69 огибает опорный элемент 68. Нижнечелюстную базу 58 помещают в полости рта пациента, затем, манипулируя регулятором 62, добиваются совмещения плоскости опорного элемента 68 с небной поверхностью центрального резца верхней челюсти (резец расположен в небном аномальном положении). Пациенту предлагают максимально сжать зубы, при этом резец верхней челюсти передает давление на опорный элемент 68, и шток 63 сместится в полость рта. Манипулируя регулировочной гайкой 65, минимизируют ход штока при максимальном сжатии зубов. После чего подводят регулировочную гайку 67 в контакт с микровыключателем 66. Таким образом, минимальный зазор между этими контактирующими элементами становится возможным в том случае, когда силы сокращения жевательных мышц пациента достигнут максимума, в этом случае замкнется цепь микровыключателя 66 и засветится светодиод канала обратной связи, находящийся на лицевой плате блока сенсомоторных команд 28. В результате сформирован сигнал, следуя которому пациент активирует функцию жевательных мышц и оказывает максимальное давление на аномально расположенный центральный резец верхней челюсти, и способствует более успешному устранению аномалии Наряду с этим, при смещении в сторону штока 63 сжимается пружина 64 и увеличивается нагрузка на внеротовую базу 1, а через нее на фронтальную опору 2 и ее толкатель 60. Таким образом, одновременно с действием на верхний зуб усиливается ретракционное действие на нижний.
Предлагаемое устройство минимизирует побочные действия традиционного ортодонтического нагружения, так как нагрузка, приложенная в пришеечной области перемещаемого зуба, уменьшает опрокидывающий момент и исключает опасность травмы сосудисто-нервного пучка у верхушки корня зуба.
Устройство с его узлами, расположенными на жесткой внеротовой базе, не касается кожи лица пациента, следовательно подвижность лицевых мышц не влияет на позицию узлов связи с зубным рядом, т.е. в отличие от известных аппаратов внеротового действия устройство обладает более адекватным лечебным воздействием и большим удобством для пациента.
Предлагаемое устройство обладает резервом формирования лечебных нагрузок: статическая нагрузка сочетается с динамической нагрузкой; возможность индикации нагрузки и возможность ее активации в системе управляемой связи и т. д. т.е. предложенное устройство является средством эффективного многопланового воздействия при устранении зубочелюстных аномалий.
Предлагаемое устройство благодаря применению сменных модулей обладает большим диапазоном функционального действия чем аналогичные известные устройства. Предложенное устройство унифицировано. В отличие от аналогов оно применяется без предварительных слепков, примерок и т.д.
Были изготовлены и испытаны макеты предлагаемого устройства. Испытания показали эффективность лечебного воздействия: при устранении аномалии губного положения третьего верхнего зуба нормализация наступала в течение 2-х месяцев пользования аппаратом, при этом пациент использовал аппарат два часа в стуки. Болевых ощущений не отмечено пациентом, патологическая подвижность не отмечалась, так как зуб перемещался вместе с участком альвеолярного гребня. Кроме того, пациенты, ранее пользовавшиеся традиционными аппаратами, например пластинками, отмечали большое удобство предложенного аппарата.





Изобретение относится к медицине, а именно к ортодонтии и предназначено для устранения аномалий прикуса зубного ряда и положение отдельных зубов. Устройство для устранения зубочелюстных аномалий содержит жесткую внеротовую базу 1, на которой закреплены фронтальная опора 2, теменная опора 3, затылочная опора 19, устройства для формирования и индикации статической и динамической нагрузок. Фронтальная опора 2 соединена с узлом связи 4 с зубным рядом, который выполнен в виде сменного модуля. Механизм для формирования и индикации статической нагрузки содержит тубус 5, на поверхности которого расположены два регулировочных кольца 8 и 9. В корпусе тубуса 5 размещены направляющие стержни 10, на которых установлен подпружиненный упор, связанный с регулировочным кольцом 8 и микролампой. Вдоль трассы перемещения микролампы уложены входные торцы световодов. Их выходные торцы формируют световое табло 6. С регулировочным кольцом 9 соединен поводок 18, связанный с затылочной опорой 19. Механизм для формирования и индикации динамической нагрузки включает ось 20 со шкивами 21. С одним из шкивов соединен счетчик циклов 22. Через шкивы 21 перекинуты тяги 23, которые связаны через динамометры 26 с рукоятками 27. Рукоятки 27 через сенсорные переключатели соединены с блоком 28 сенсомоторных команд. 10 з.п. ф-лы, 8 ил.
| Ортодонтический аппарат для лечения протруссии верхней челюсти | 1985 |
|
SU1509059A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
