Изобретение относится к измерительной технике и может быть использовано в системах автоматики и сигнализации, а также для защиты машин от механических перегрузок.
Известно устройство для контроля наличия вибраций, содержащее полый конус, на наклонном дне которого размещено инерционное тело в виде металлического шарика, взаимодействующего в его начальном положении равновесия с вертикальным участком боковой стенки внутренней полости корпуса и установленный в корпусе бесконтактный датчик [1]
Недостатком данного устройства является сужение эксплуатационных возможностей за счет определения только порога срабатывания и невозможности определения направления воздействия вибрации.
Наиболее близким к изобретению является вибрационный пороговый датчик, содержащий немагнитный корпус с крышкой, размещенный в нем инерционный элемент в виде электропроводного шарика и два изолированных один от другого электроконтакта, один из которых выполнен в виде усеченного полого конуса и закреплен на крышке, другой электроконтакт, закрепленный на корпусе, выполнен в виде полого конуса и обращен основанием к основанию усеченного конуса [2]
Недостатком данного датчика является сужение эксплуатационных возможностей из-за определения только порога перегрузки и невозможности определения величины и направления перегрузки.
Цель изобретения расширение эксплуатационных возможностей путем обеспечения определения наряду с пороговым значением перегрузки и ее текущей величины и направления.
Это достигается тем, что вибрационный датчик, содержащий немагнитный конусообразный корпус с крышкой, размещенной в вершине корпуса, инерционный элемент, выполненный в виде электропроводного шарика, первый электроконтакт, выполненный в виде усеченного полого конуса, закрепленного на крышке корпуса, второй электроконтакт, выполненный в виде полого конуса, размещенного по боковой поверхности корпуса так, что его основание обращено к нижнему основанию усеченного конуса первого электроконтакта и параллельно ему, дополнительно снабжен вычислителем, индикатором направления перегрузки, индикатором величины перегрузки, изолированными между собой центральным и кольцевым электроконтактами, центральный электроконтакт размещен в вершине конуса второго электроконтакта и изолирован от него, кольцевой электроконтакт по периметру вершины конуса второго электроконтакта и изолирован от него, первый электроконтакт выполнен в виде изолированных друг от друга секторов, выводы которых образуют первую группу выходов датчика, вторым выходом которого является вывод кольцевого электроконтакта, центральный и второй электроконтакты соединены с положительным выводом источника питания, первая группа входов и второй вход вычислителя соединены соответственно с первой группой выходов и вторым выходом датчика, первая группа выходов вычислителя соединена с группой входов индикатора направления перегрузки, второй выход с входом индикатора перегрузки.
Кроме того, вычислитель содержит группу из n триггеров, где n число секторов первого электроконтакта вибрационного датчика, первый, второй и третий элементы И, инвертор, генератор импульсов, дифференцирующую цепь, счетчик импульсов, умножитель, делитель, задатчик постоянной величины и кнопку "Установка 0", причем информационные входы триггеров соединены с соответствующими входами первой группы входов вычислителя, второй вход которого соединен с выходом генератора импульсов, а выход с информационным входом счетчика. Входы обнуления триггеров и счетчика импульсов объединены и через кнопку "Установка 0" соединены с плюсовой шиной источника питания, прямые выходы триггеров являются соответствующими выходами первой группы выходов вычислителя, а инверсные выходы соединены с соответствующими входами группы n входов первого элемента И, выход которого соединен с третьим входом второго элемента И и вторым входом третьего элемента И, первый вход которого соединен с выходом дифференцирующей цепи, а выход с входом обнуления счетчика импульсов, выход которого соединен с первым входом делителя, второй вход которого соединен с выходом задатчика постоянной величины, а выход является вторым выходом вычислителя.
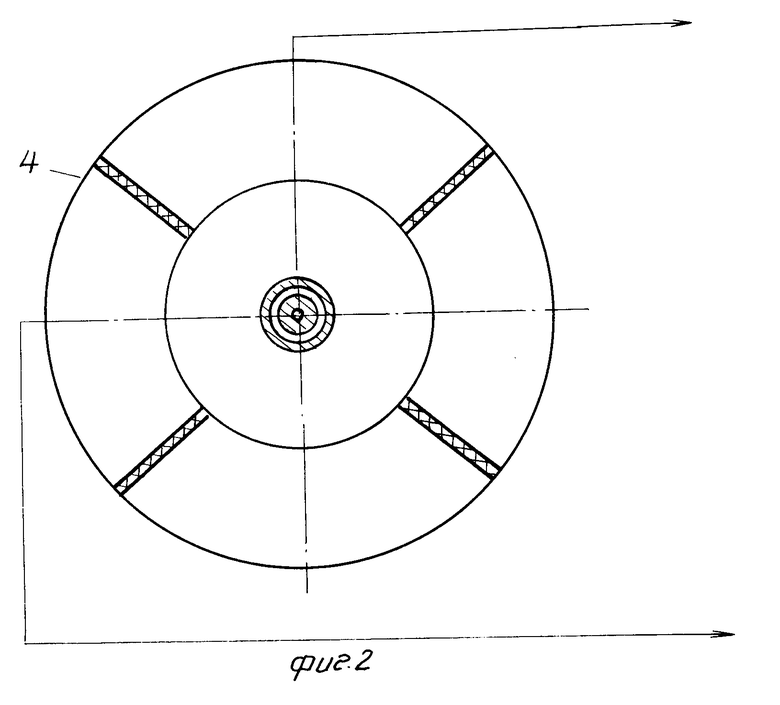
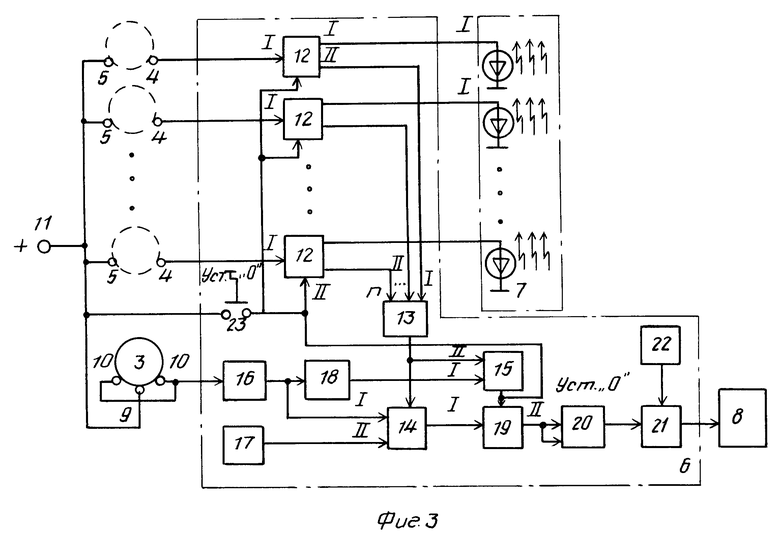
На фиг.1 изображена конструктивная схема вибрационного датчика; на фиг.2 то же, план; на фиг.3 структурная схема электрической части вибрационного датчика.
Вибрационный датчик содержит немагнитный конусообразный корпус 1 с крышкой 2, размещенной в вершине корпуса, инерционный элемент 3, выполненный в виде электропроводного шарика, первый электроконтакт 4, выполненный в виде усеченного полого конуса, закрепленного на крышке 2 корпуса, второй электроконтакт 5, выполненный в виде полого конуса, размещенного по боковой поверхности корпуса 1 так, что его основание обращено к нижнему основанию усеченного конуса первого электроконтакта 4 и параллельно ему, вычислитель 6, индикатор 7 направления перегрузки, индикатор 8 величины перегрузки, изолированные между собой центральным 9 и кольцевым 10 электроконтактами, центральный электроконтакт 9 размещен в вершине конуса второго электроконтакта 5 и изолирован от него, кольцевой электроконтакт 10 по периметру вершины конуса второго электроконтакта 5 и изолирован от него.
Первый электроконтакт 4 выполнен в виде изолированных друг от друга секторов, выводы которых образуют первую группу выходов датчика, вторым выходом которого является вывод кольцевого электроконтакта 10. Центральный 9 и второй 5 электроконтакты соединены с положительным выводом источника 11 питания, первая группа входов и второй вод вычислителя 6 соответственно с первой группой выходов и вторым выходом датчика. Первая группа выходов вычислителя 6 соединена с группой входов индикатора 7 направления перегрузки, второй выход с входом индикатора 8 перегрузки.
Вычислитель 6 содержит группу из n триггеров 12, где n число секторов первого электроконтакта 4 вибрационного датчика, первый 13, второй 14 и третий 15 элементы И, инвертор 16, генератор 17 импульсов, дифференцирующую цепь 18, счетчик 19 импульсов, умножитель 20, делитель 21, задатчик 22 постоянной величины и кнопку 23 "Установка 0". Причем информационные входы триггеров 12 соединены с соответствующими входами первой группы входов вычислителя 6, второй вход которого через инвертор 16 соединен с входом дифференцирующей цепи 18 и первым входом второго элемента И 14, второй вход которого соединен с выходом генератора 17 импульсов, а выход с информационным входом счетчика 19. Входы обнуления триггеров 12 и счетчика 19 импульсов объединены и через кнопку 23 "Установка 0" соединены с плюсовой шиной источника 11 питания. Прямые выходы триггеров 12 являются соответствующими выходами первой группы выходов вычислителя 6, а инверсные выходы соединены соответствующими входами группы n входов первого элемента И 13, выход которого соединен с третьим входом второго элемента И 14 и вторым входом третьего элемента И 15, первый вход которого соединен с выходом дифференцирующей цепи 18, а выход с входом обнуления счетчика 19 импульсов, выход которого соединен с первым входом делителя 21, второй вход которого соединен с выходом задатчика 22 постоянной величины, а выход является вторым выходом вычислителя 6.
Количество секторов первого электроконтакта 4 выбирается в зависимости от необходимой точности определения направления перегрузки. Чем больше количество секторов, тем выше точность. Минимальная величина сектора определяется возможностями технологии изготовления с учетом обеспечения надежного контакта шарика.
Вибрационный датчик работает следующим образом.
Вибрационный датчик устанавливают на объект контроля (не показано).
До воздействия линейной пеpегрузки инерционный элемент 3 в виде электропроводного шарика замыкает между собой центральный 9 и кольцевой 10 электроконтакты, что приводит к появлению сигнала на входе инвертора 16, в результате этого на входе дифференцирующей цепи 18 и на первом входе второго элемента И 14 сигнал отсутствует. Кнопкой 23 "Установка 0" устанавливают счетчик 19 импульсов и группу из n триггеров 12 в исходное состояние путем подачи сигнала с плюсовой шины 11 на входы обнуления триггеров 12.
В результате этого на счетчике импульсов будут "нулевые" показания, на прямых выходах триггеров 12 сигнал будет отсутствовать, что приведет к отсутствию свечения светодиодов индикатора 7 направления перегрузки. На инверсных выходах триггеров 12 будет единичный сигнал, что приведет к появлению сигнала на третьем входе второго элемента И 14 и втором входе третьего элемента И 15. Таким образом, в исходном состоянии до воздействия линейной перегрузки, свечение светодиодов индикатора 7 направления перегрузки отсутствует, также отсутствует сигнал на входе дифференцирующей цепи 18 и на первом входе второго элемента И 14, а разрешающий сигнал подается на третий вход второго элемента И 14 и на второй вход третьего элемента И 15.
Под воздействием перегрузки инерционный элемент 3 в виде электропроводного шарика будет перемещаться в сторону одного из секторов первого электроконтакта 4, что приведет к размыканию центрального 9 и кольцевого 10 электроконтактов и отсутствию сигнала на входе инвертора 16. На выходе инвертора 16 появится сигнал, который одновременно поступает на вход дифференцирующей цепи 18 и на первый вход второго элемента И 14. С выхода дифференцирующей цепи 18 сигнал через третий элемент И 15 поступает на вход обнуления счетчика 13 импульсов, на информационный вход которого поступает сигнал с генератора 17 импульсов через второй элемент И 14.
Сигнал на информационный вход счетчика 19 импульсов перестанет поступать в момент замыкания электропроводным шариком второго 5 и одного из секторов первого 4 электроконтактов. В этот момент времени на первый вход соответствующего триггера 12 поступает сигнал с одного из секторов первого электроконтакта 4, под действием которого на прямом выходе появится сигнал, приводящий к свечению соответствующего светодиода индикатора 7 направления перегрузки, а с инверсного выхода сигнал снимается. Отсутствие сигнала на инверсном выходе соответствующего триггера 12, определяющего сектор первого электроконтакта 4, приведет к снятию сигнала с третьего входа второго элемента И 14.
Таким образом, на счетчике 19 импульсов окажется записан временной интервал t, определяющий скорость движения инерционного элемента 3 в виде электропроводного шарика. Данный сигнал, пропорциональный t, поступает на первый и второй входы умножителя 20, с выхода которого сигнал, пропорциональный t2, поступает на первый вход делителя 21, на второй вход которого с задатчика 22 постоянной величины поступает сигнал, пропорциональный  С выхода делителя 21 на индикатор 8 перегрузки поступает сигнал перегрузки, пропорциональный величине
С выхода делителя 21 на индикатор 8 перегрузки поступает сигнал перегрузки, пропорциональный величине  .
.
При снятии линейной перегрузки инерционный элемент 3 под действием собственного веса возвращается в исходное состояние и после нажатия кнопки "Установка 0" данное устройство будет готово к следующему измерению. Применение предлагаемого устройства позволяет расширить эксплуатационные возможности вибрационного датчика за счет определения наряду с пороговым значением перегрузки и ее величины и направления.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСХОДОМЕР ТОПЛИВА | 1990 |
|
RU2035699C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПРОХОДЯЩЕЙ УДАРНОЙ ВОЛНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2029309C1 |
| ТОПЛИВОМЕР | 1991 |
|
RU2019794C1 |
| ЭЛЕКТРИЧЕСКИЙ ОЧИСТИТЕЛЬ ДИЭЛЕКТРИЧЕСКИХ ЖИДКОСТЕЙ | 1996 |
|
RU2145524C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТОВ В ГРУППЕ | 1990 |
|
RU2029957C1 |
| СПОСОБ НАНЕСЕНИЯ КОМБИНИРОВАННОГО ЖАРОСТОЙКОГО ПОКРЫТИЯ | 1996 |
|
RU2145363C1 |
| ВИБРАЦИОННЫЙ ДАТЧИК | 2004 |
|
RU2279645C2 |
| ДИФФУЗОР ОСНОВНОЙ КАМЕРЫ СГОРАНИЯ АВИАЦИОННОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1996 |
|
RU2159898C2 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА КРИВОЛИНЕЙНОГО ОБРАЗЦА ПРИ РАСТЯЖЕНИИ | 1995 |
|
RU2095781C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПАСНЫХ ВИБРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2282833C2 |
Изобретение относится к измерительной технике и может быть использовано в системах автоматики и сигнализации, а также для защиты машин от механических перегрузок. Цель изобретения - расширение эксплуатационных возможностей путем обеспечения определения наряду с пороговым значением перегрузки и ее текущей величины и направления. Устройство содержит вибрационный датчик перегрузки, состоящий из немагнитного корпуса с крышкой, размещенного в нем инерционного элемента в виде электропроводного шарика, верхнего электроконтакта, выполненного в виде усеченного полого конуса и закрепленного на крышке, и нижнего электроконтакта 6, изолированного от верхнего, выполненного в виде полого конуса, закрепленного на корпусе и обращенного основанием к основанию усеченного конуса, вычислитель 7, первой группой входов и вторым входом связанный соответственно с первой группой выходов и вторым выходом вибрационного датчика перегрузки, первой группой выходов с группой входов индикатора 8 направления перегрузки и вторым выходом с входом индикатора перегрузки. Вибрационный датчик перегрузки снабжен изолированными между собой центральными 10 и кольцевыми 11 электроконтактами, размещенными в вершине нижнего электроконтакта 6, изолированными от него. Причем в исходном положении центральный 10 и кольцевой 11 электроконтакты через электропроводный шарик 4 замкнуты между собой, верхний электроконтакт выполнен в виде изолированных друг от друга секторов, имеющих индивидуальные электрические выводы, являющиеся первой группой выходов вибрационных датчика перегрузки, второй выход которого соединен с кольцевым 11 электроконтактом, а центральный 10 и нижний 6 электроконтакты соединены с плюсовой шиной источника 12 питания. 1 з.п. ф-лы, 3 ил.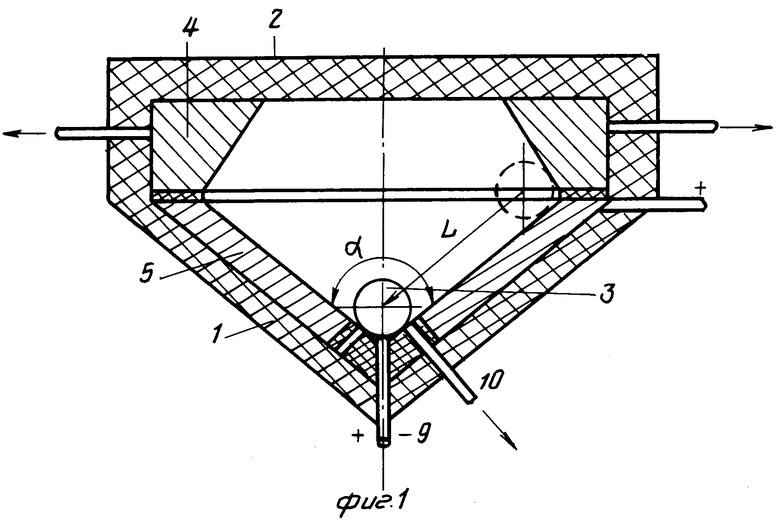
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кухлинг Х | |||
| Справочник по физике | |||
| Перевод с немецкого | |||
| М.: Мир, 1982, с.45. | |||
