Изобретение относится к пьезоэлектрическим приводным устройствам и предназначено для использования в устройствах автоматики, робототехники и т.д.
Известен пьезоэлектрический двигатель ПД-28 [1] Он содержит пьезоэлемент, на внешней цилиндрической поверхности которого установлены толкатели, упирающиеся во внутреннюю поверхность ротора.
Известен пьезоэлектрический двигатель ПДР-46 реверсивного вращения [2] Двигатель содержит соосно расположенные цилиндрические пьезоэлементы с закрепленными на них толкателями, один из которых установлен на корпусе, а другой на валу, и охватывающий их ротор в виде тонкостенного цилиндра.
Недостатком этого привода является то, что при возбуждении одного из пьезоэлементов акустические колебания, проникая в ротор вызывают снижение фрикционного трения между ротором и толкателями невозбужденного пьезоэлемента, что приводит к снижению основного момента и уменьшению КПД.
Цель изобретения повышение вращающего момента привода.
Для этого в пьезоэлектрическом приводе, содержащем два соосно расположенных цилиндрических пьезоэлемента с закрепленными на их внешних цилиндрических поверхностях толкателями, один из которых установлен на корпусе, а другой на валу, и охватывающий их ротор в виде тонкостенного цилиндра, ротор разделен на две части одним рядом прорезей в виде кольцевых секторов, расположенных между зонами контакта первого и второго пьезоэлементов с ротором и образующих три перемычки, расположенных по окружности ротора под углом 120о друг к другу, причем ширина перемычки Δ выбрана из соотношения R≥10Δ, где R радиус ротора.
Сущность предложенного технического решения состоит в преобразовании радиальных колебаний возбужденной части ротора в изгибные колебания невозбужденной части ротора, что приводит к увеличению вращающего момента и доведения его до уровня фрикционного сцепления.
На фиг.1 приведена конструкция предлагаемого привода.
Он содержит соосно расположенные цилиндрические пьезоэлементы 1 и 2 с закрепленными на их внешних цилиндрических поверхностях пластинами -- толкателями 3. Для возбуждения акустических колебаний в пьзоэлементах они снабжены электродами 4 и поляризованы.
Пьезоэлемент 1 установлен на корпусе 5 привода через прокладку 6. Пьезоэлемент 2 закреплен на валу 7 привода в держателе 8, который одновременно может являться и коллектором токосъемного устройства 9. Оба пьезоэлемента 1 и 2 охватываются ротором 10, выполненным в виде тонкостенного цилиндра или стакана. Электроды 4 пьезоэлементов 1 и 2 электрически соединены через переключатель 11 с источником возбуждения 12. Ротор 10 разделен на две части 13 и 14 тремя перемычками 15, расположенными между пьезоэлементами 1 и 2 и под углом 120о.
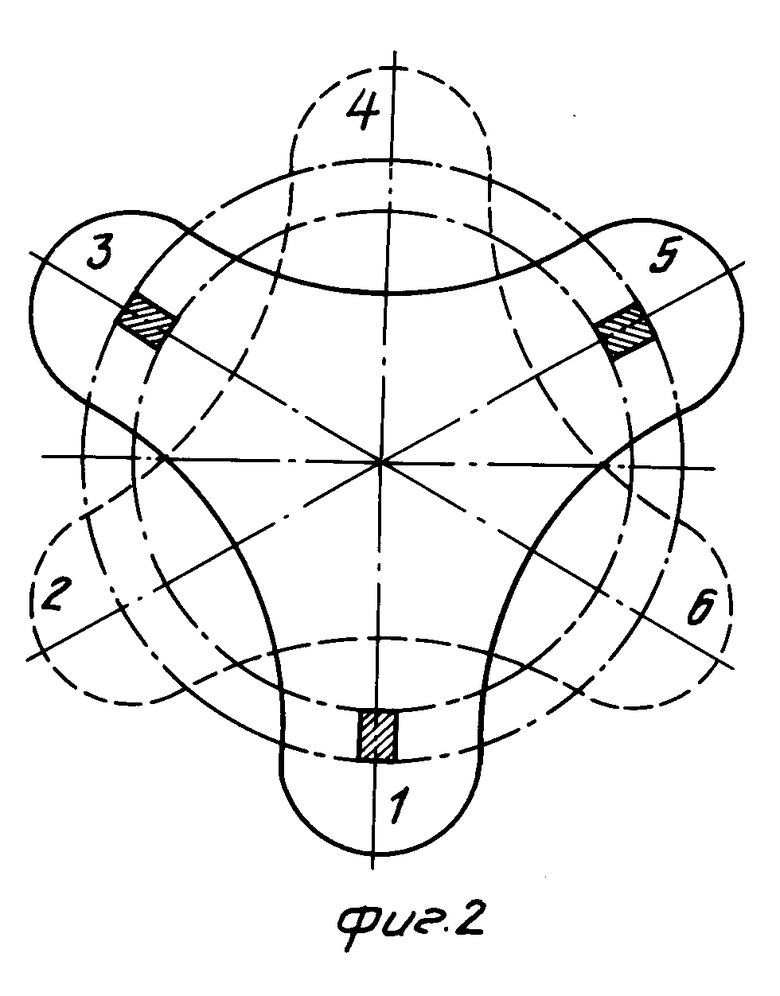
На фиг.2 приведен диаметральный разрез ротора.
Работает предложенный привод следующим образом (см.фиг.1). При подключении электродов 4 пьезоэлемента 1 к источнику возбуждения 12 в пьезоэлементе 1 возникают акустические колебания. Эти колебания передаются в толкатели 3, которые взаимодействуя с ротором 10, вращают его. Вращательный момент, сообщенный толкателями 3 ротору 10, передается через фрикционный контакт ротор 10 толкатели 3 пьезоэлемента 2 на вал 7 привода и дальше в нагрузку.
Таким образом, фрикционный контакт ротор 10 толкатели 3 невозбужденного пьезоэлемента 2 должен выдерживать максимальный вращательный момент, развиваемый возбужденным пьезоэлементом 1. Это достигается путем трансформации радиальных колебаний возбужденной части ротора в изгибные колебания невозбужденной части. На фиг.2 приведен характер изгибных колебаний, возникающих в невозбужденной части ротора под действием радиальных колебаний возбужденной части. Резонансная частота изгибных колебаний, возникающих в невозбужденном роторе, описывается соотношением
fи=  ·
·  , и резонансная частота радиальных колебаний в возбужденной части ротора описывается соотношением
, и резонансная частота радиальных колебаний в возбужденной части ротора описывается соотношением
fR= 
 , где h толщина ротора;
, где h толщина ротора;
n номер моды изгибных колебаний (n=2);
R радиус ротора;
m число перемычек;
Е модуль Юнга;
ρ- плотность материала ротора.
Отношение резонансных частот описывается соотношением


Для обеспечения конструкционной стабильности одной части ротора относительно другой минимальное необходимое число тонких перемычек должно равняться 3 (m=3). Для этого случая имеем 0,25
0,25  Для реальных конструкций R≥10˙h, что указывает на значительное резонансное рассогласование частей ротора. Поскольку резонансная частота пьезоэлемента fn ближе к радиальной резонансной частоте ротора, то в данном случае не происходит резонансного захвата на частоте изгибных колебаний невозубжденного ротора.
Для реальных конструкций R≥10˙h, что указывает на значительное резонансное рассогласование частей ротора. Поскольку резонансная частота пьезоэлемента fn ближе к радиальной резонансной частоте ротора, то в данном случае не происходит резонансного захвата на частоте изгибных колебаний невозубжденного ротора.
При увеличении числа перемычек fи_→fR, fи_→fп, т.е. усиливается взаимосвязь между частями ротора и пьезоэлемента, что снижает эффективность ротора.
Если не учитывать ослабление колебаний в вертикальных перемычках, то можно констатировать, что колебательная скорость возбужденной части ротора передается без ослабления в точки 1-6 невозбужденной части ротора (см.фиг.2). В других точках скорость гораздо ниже, следовательно средняя колебательная скорость резко уменьшается и фрикционное трение увеличится.
Выполним оценки по уменьшению колебательной скорости возбужденной и невозбужденной части предлагаемого ротора.
На фиг.3 показана механическая схема действия сил возбуждающей части ротора.
Колебательная скорость определяется радиальным перемещением W. Для возбужденной части ротора можно предположить, что сила F2 равномерно распределена по внутренней поверхности и создает давление Р. В этом случае, поскольку система не в резонансе, радиальное смещение равномерно (без учета упругости перемычек) не зависит от координаты Х и описывается соотношение:
W2=  ·
·  1-
1-  где μ- коэффициент Пуассона. Сила F1, действующая на не возбужденную часть ротора через три перемычки, описывается соотношением
где μ- коэффициент Пуассона. Сила F1, действующая на не возбужденную часть ротора через три перемычки, описывается соотношением
F1=З˙Р˙l˙ Δ, где l длина возбужденной части ротора;
Δ- ширина перемычки.
Распределив эту силу равномерно по контуру невозбужденной части ротора, можно показать, что в этом случае радиальное смещение невозбужденной части (при отсутствии резонанса) зависит от координаты Х и описывается соотношением
W1=  exp-kx·cos kx, где q
exp-kx·cos kx, где q 
K  /для случая μ 0,3/, D
/для случая μ 0,3/, D 
Выполнив оценку указанных характеристик для реальной конструкции ротора со следующими параметрами, получим


 ‗‗⇒
‗‗⇒ 

 ≈ 43
≈ 43
Из представленных данных следует, что без учета влияния ослабления в перемычках радиальные перемещение, а следовательно, и радиальная скорость в невозбужденной части в центре зоны фрикционного контакта более чем в 40 раз меньше, чем возбужденной, что приводит к повышению фрикционного трения, к увеличению вращающего момента двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический двигатель | 1991 |
|
SU1825435A3 |
| МИКРОМАНИПУЛЯТОР | 1992 |
|
RU2041480C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1819372A3 |
| Перистальтический микронасос | 1991 |
|
SU1776346A3 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| ДАТЧИК ВИБРАЦИОННОГО ПЛОТНОМЕРА | 1991 |
|
RU2024841C1 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОСТЕНД И ВИБРАТОР РЕЗОНАНСНОГО ТИПА | 2007 |
|
RU2334966C1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1807548A1 |


Использование: в устройствах автоматики, робототехники и т.д. Сущность изобретения: ротор разделен на две части одним рядом тонких прорезей в виде кольцевых секторов и образованными ими перемычками, расположенными под углом 120°. Ширина перемычек Δ удовлетворяет соотношению R≥ 10Δ, где R радиус ротора. 3 ил.
ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД, содержащий соосно расположенные два цилиндрических пьезоэлемента с закрепленными на их внешних цилиндрических поверхностях толкателями, один из которых установлен на корпусе, а второй на валу, охватывающий их ротор в виде тонкостенного цилиндра, фрикционно контактирующего с толкателями пьезоэлементов, отличающийся тем, что ротор разделен на две части одним рядом прорезей в виде кольцевых секторов, расположенных между зонами контакта первого и второго пьезоэлементов с ротором и образующих три перемычки, расположенных по окружности под углом 120o друг к другу, причем ширина перемычки Δ выбрана из соотношения R≥ 10 Δ , где R радиус ротора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
