Изобретение относится к приборостроению и может быть использовано для создания микроперемещений в медико-биологической технике, химической, электронной и других отраслях промышленности.
Известен микроманипулятор, содержащий подвижный столик и привод [1]
Известно двухкоординатное установочное устройство, содержащее неподвижную рамку, на которой устанавливаются пьезоэлектрические изгибные ("биморфные") элементы. Недостатком данного устройства является малый диапазон регулировки микроперемещений, наличие дрейфа и т.д. [2]
Наиболее близким техническим решением к изобретению является устройство для перемещения предметного столика микроскопа, в котором с целью расширения диапазона регулирования и обеспечения возможности автоматизации процесса перемещения каретка с установленным на ней объектом перемещается с помощью шагового двигателя, передающего вращение микрометрическому винту [3]
Величина единичного микроперемещения в данном устройстве определяется шагом двигателя и для шаговых двигателей определяется десятками угловых минут. Дальнейшее уменьшение микроперемещений в таких системах может быть достигнуто установкой понижающих редукторов на двигатели или изменением передаточного числа микрометрического винта, что приводит к усложнению конструкции, увеличению габаритов, энерго- и трудоемкости, а также к ограничению возможности временной группировки микроперемещений, что определяет скорость микроподачи. Микроперемещение однозначно завязано на скорость и наоборот.
Задачей изобретения является обеспечение возможности одновременного формирования малых единичных перемещений и их группировки по скорости (времени).
Указанный технический результат достигается тем, что в микроманипуляторе, содержащем подвижный столик, соединенный через винт-гайку с приводом, подключенным к блоку управления, привод выполнен в виде вала с ротором, связанным через толкатели с кольцевыми пьезоэлементами, один из которых установлен на валу, а второй установлен на корпусе, при этом блок управления выполнен в виде последовательно соединенных блока формирования частоты пачек импульсов возбуждения, блока формирования длительности пачки импульсов возбуждения, управляемого ключа и генератора формирования высокочастотных импульсов возбуждения пьезоэлементов, причем вход управляющего ключа подключен к источнику питания.
На фиг.1 показана блок-схема микроманипулятора; на фиг.2 эпюры питающих напряжений, поясняющих работу.
Устройство содержит подвижную каретку 1 расположенную в подшипниковых направляющих 2, соединенную с микрометрической винт-гайкой 3. Винт-гайка 3 сопрягается через подвижную муфту 4 с валом пьезопривода 5, включающего ротор 6, кольцевой пьезоэлемент 7, установленный на валу, и пьезоэлемент 8, установленный на корпусе, на внешней цилиндрической стороне которых закреплены металлические упругие толкатели 9, упирающиеся во внутреннюю часть ротора 6.
Система управления включает в себя генератор формирования импульсов возбуждения 10 пьезоэлемента, управляемый ключ 11, источник питания 12, блок формирования 13 длительности пачки импульсов возбуждения и блок формирования 14 частоты пачек импульсов возбуждения.
Работа устройства осуществляется следующим образом.
Даже при наличии постоянного питающего напряжения на выходе блока 12 (эпюра А, фиг.2), например, напряжения питания Un 27 В, сигнал в такой форме не поступает на блок 10. Форму импульсов питания формирует ключ 11, который управляется генератором частоты 14, формирующим частоту импульсов управления fсл (эпюра Б). В блоке 13 формируется длительность импульсов управления τn в соответствии с частотой fсл. Сформированный сигнал управления (эпюра В) поступает на управляемый ключ 11, с выхода которого идут импульсы питания, соответствующие частоте и длительности импульсов управления (эпюра Г).
В блоке 10 осуществляется преобразование импульсов питания в пачки импульсов возбуждения на резонансной частоте пьезоэлемента с напряжением возбуждения Uвозб. и частотой fрез (эпюра Д).
При наличии напряжения на пьезоэлементе 7 он возбуждается. Колебания от пьезоэлемента передаются в толкатели 9, которые, отталкиваясь от фрикционно-заторможенного толкателями нижнего пьезоэлемента ротора, создают момент вращения валу. При изменении направления вращения подключается пьезоэлемент 8. При этом вращающий момент, сообщенный толкателями этого пьезоэлемента ротору 6 передается через фрикционный контакт верхнего пьезоэлемента и дальше в нагрузку.
Шаг пьезопривода или угол разворота ротора Δϕ пропорционален длительности импульса управления τ (эпюра Е). Угловое вращение микрометрическим винтом 3 преобразуется в поступательное движение, которое передается каретке 1. Таким образом, единичное микроперемещение каретки 1 Δ l (эпюра Е) будет определяться шагом пьезопривода и передаточным отношением винт-гайка.
Скорость перемещения при заданной микроподаче Δ l будет определяться частотой следования импульсов управления fсл.
Использование устройства за счет одновременного формирования микроподач и их группировки позволило значительно улучшить характеристики существующего микроманипулятора. Так, достигнутый угловой шаг на пьезоприводе с диаметром пьезошайбы 20 мм составляет ≈ 30 угл.с, что в сочетании с микрометрической винт-гайкой с передаточным числом 1/500 позволяет реализовать микроперемещение ≈ 10-2 мкм, что при частоте fсп ≈ 1 Гц обеспечивает скорость микроперемещения ≈ 10-2 мкм/с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Перистальтический микронасос | 1991 |
|
SU1776346A3 |
| МОТОРНЫЙ КЛАПАН С ПОВОРОТНОЙ ПРОБКОЙ | 2006 |
|
RU2367833C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД | 1991 |
|
RU2044398C1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1825435A3 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1819372A3 |
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| Предметный столик растрового электронного микроскопа | 1987 |
|
SU1522318A1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| Устройство управления пъезодвигателем | 1985 |
|
SU1366989A1 |
| Устройство для возбуждения бесщеточных электрических машин | 1976 |
|
SU692052A1 |

Использование: приборостроение, для создания микроперемещений, в медико-биологической технике. Сущность изобретения: микроманипулятор содержит подвижную каретку 1, пьезоэлектрический привод в виде вала с ротором 6, связанный через толкатели 9 с кольцевыми пьезоэлементами 7 и 8, один из которых установлен на валу, а второй на корпусе, и систему управления, состоящую из генератора 10 высокочастотных импульсов, управляемого ключа 11, формирователей 14, 13 частоты и длительности импульсов возбуждения соответственно и источника питания 12. 2 ил.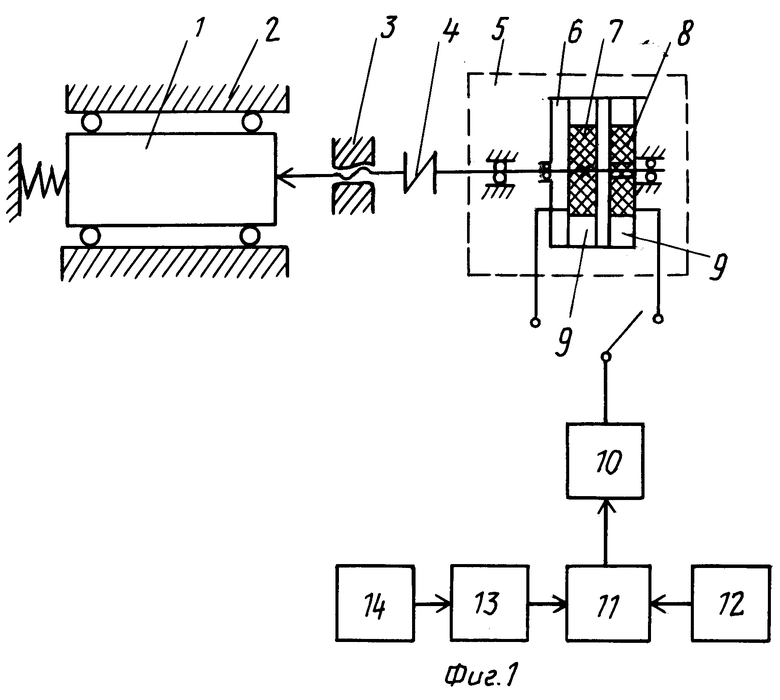
МИКРОМАНИПУЛЯТОР, содержащий подвижный столик, соединенный через винт-гайку с приводом, подключенным к блоку управления, отличающийся тем, что привод выполнен в виде вала с ротором, связанным через толкатели с концевыми пьезоэлементами, один из которых установлен на валу, а второй установлен на корпусе, при этом блок управления выполнен в виде последовательно соединенных блока формирования частоты пачек импульсов возбуждения, управляемого ключа и генератора формирования высокочастотных импульсов возбуждения пьезоэлементов, причем вход управляющего ключа подключен к источнику питания.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для перемещения предметного столика микроскопа | 1985 |
|
SU1327041A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
