Изобретение относится к акселерометрии и может быть использовано для измерения ускорения различных подвижных (в том числе и летательных) объектов.
Известен способ определения ускорения, основанный на регистрации величины поступательного перемещения инерционного тела (ИТ), через пружину связанного с корпусом прибора, под действием силы инерции [1] Недостатком способа является невысокая чувствительность и, как следствие, точность в связи с существенным влиянием трения в подвесе линейно перемещающегося инерционного тела.
Другим известным способом, обеспечивающим меньшее трение в подвесе ИТ и соответственно большую точность, является способ, основанный на регистрации отклонения (под действием силы инерции) маятника от исходного горизонтального положения [2] При этом противодействующее силе инерции воздействие на маятник создается механической или электрической пружиной, через которую он связан с корпусом прибора.
Однако точность данного способа является все же недостаточно высокой вследствие малости зоны перемещения маятника, что связано с появлением и ростом (с ростом угла отклонения) ошибки из-за отклонения оси чувствительности маятника, а также вследствие влияния на точность измерений нелинейности и нестабильности противодействующей пружины и аддитивных уходов измерительного преобразователя.
Целью изобретения является повышение точности измерений.
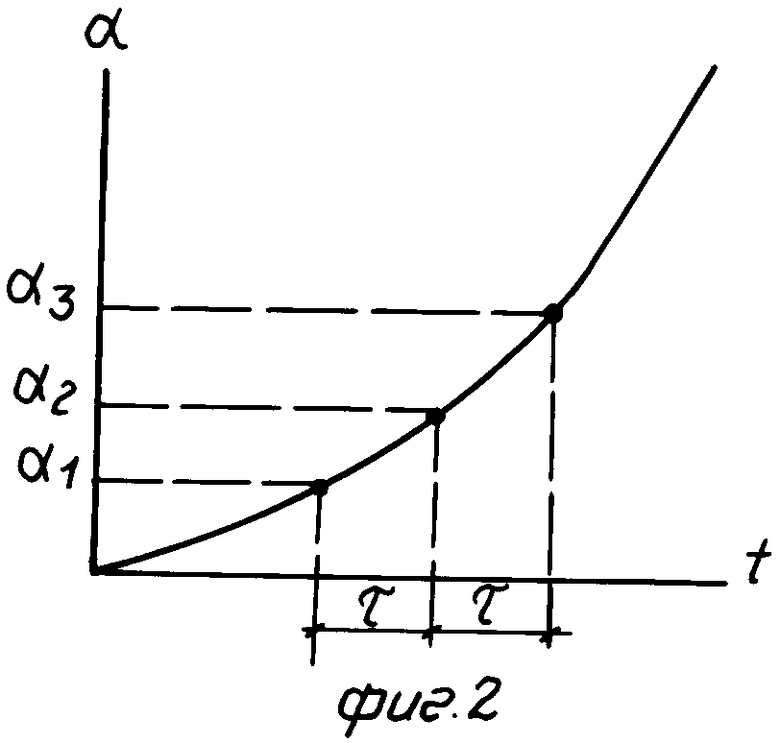
Цель достигается за счет увеличения допустимого углового отклонения маятника от исходного положения и исключения влияния противодействующей пружины и аддитивных уходов измерительного преобразователя на результат измерения. Для этого после размещения маятника в исходном положении отключают противодействующую пружину, в процессе свободного движения маятника задают два равных временных интервала и измеряют три угловых положения α 1, α 2, α 3 маятника, соответствующих границам интервалов, определяют косинусы первого и второго углового положения (соs α 1, cos α 2), а искомое ускорение W рассчитывают по зависимости
W  (1) где m, I масса и момент инерции маятника;
(1) где m, I масса и момент инерции маятника;
l расстояние от оси вращения до центра масс маятника;
τ длительность каждого из задаваемых временных интервалов.
Зависимость (1) получается следующим образом. Уравнение движения маятника после его освобождения имеет вид
I = ml·W·cosα. (2) Принимая на малых интервалах времени τ решение уравнения (2) в виде
= ml·W·cosα. (2) Принимая на малых интервалах времени τ решение уравнения (2) в виде
αi= αi-1+ +
+  W· cos αi-1·
W· cos αi-1·  (3) составляя на основании (3) систему алгебраических уравнений
(3) составляя на основании (3) систему алгебраических уравнений





 (4)
(4)
а затем преобразуя ее к виду
 (5)
(5)
и решая систему (5), получают зависимость (1).
Сравнение заявляемого способа с прототипом, а также с другими техническими решениями позволяет утверждать о соответствии заявляемого способа критериям "новизна" и "существенные отличия".
На фиг.1 приведен вариант устройства, реализующего заявляемый способ; на фиг.2 приведена траектория движения маятника, иллюстрирующая алгоритм оценивания ускорения.
Устройство содержит инерционное тело (ИТ) 1 в виде маятника, источник питания (ИП) 2, через ключ 3 связанный с датчиком момента (ДМ) 4, выход которого связан с ИТ 1, кварцевый генератор (КГ) 5, связанный с распределителем импульсов (РИ) 6, связанный с ИТ 1 фотодатчик (ФД) 7, ключи 8-10, первые входы которых связаны с выходом ФД 7, связанные с выходами ключей 8-10 устройства выборки-хранения (УВХ) 11-13 соответственно, ключи 14-16, первые входы которых связаны с выходами УВХ 11-13 соответственно, аналого-цифровые преобразователи (АЦП) 17-19, входы которых связаны с выходами ключей 14-16 соответственно, связанные с АЦП 17, 18 определители косинусов (ОК) 20, 21 и связанный с ОК 20, 21 и АЦП 19 спецвычислитель (СВ) 22, причем первый выход РИ 6 связан с управляющим входом ключа 3, второй, третий и четвертый выходы РИ 6 связаны с управляющими входами ключей 8-10 соответственно, пятый выход РИ 6 связан с управляющими входами ключей 14-16, а шестой выход РИ 6 связан с СВ 22.
Устройство работает следующим образом. С подачей питания происходит обнуление и восстановление исходного состояния электронных элементов устройства. Импульсы с КГ 5 начинают поступать в РИ 6. По мере поступления импульсов на выходе РИ 6 формируются управляющие импульсы. В течение первого импульса открыт ключ 3, через который напряжение ИП 2 поступает в ДМ 4, что обеспечивает приведение ИТ 1 в исходное положение с нулевым углом отклонения. По окончании первого импульса с РИ 6 ключ 3 закрывается, снимая питание с ДМ 4. ИТ 1 начинает свободное угловое движение. Через некоторое время, достаточное для окончания переходных процессов в ДМ 4, с второго выхода РИ 6 на ключ 8 поступает короткий импульс, в течение которого сигнал с ФД 7, отражающий текущее угловое положение ИТ 1, поступает и запоминается в УВХ 11. Через временной интервал длительностью τ точно такой же импульс с третьего выхода РИ 6 поступает на ключ 9, а еще через τ с четвертого выхода РИ 6 на ключ 10, обеспечивая запоминание в УВХ 12 и 13 соответствующей информации. Пятым импульсом с РИ 6 открываются ключи 14-16 и аналоговые сигналы с УВХ 11-13 о трех угловых положениях (α 1, α 2, α 3) ИТ 1 поступают на соответствующие АЦП 17-19, где преобразуются в цифровые коды. В ОК 20, 21 определяются косинусы углов α 1, α 2. Шестой сигнал с РИ 6 поступает в СВ 22. По этому сигналу осуществляется опрос ОК 20, 21, АЦП 19 и реализация в СВ 22 алгоритма (1). Все элементы и узлы данного устройства являются известными и описаны в соответствующей литературе [3, 4] Определители косинусов и спецвычислитель выполнены на базе микропроцессора, например серии КР 1810.
Положительный эффект доказывается следующими рассуждениями. В известном способе угол допустимого углового отклонения маятника от положения равновесия весьма мал и ограничивается углом α доп, для которого с точностью, равной требуемой погрешности γтр. измерения, выполняется условие cos α доп. ≈1. Так, например, при γтр.=3 ˙10-5допустимый угол перемещения составляет 0,5 градусов. При длине маятника в 2,5 см перемещение его конца при этом составит менее 0,2 мм. В заявляемом способе угол допустимого перемещения маятника может быть значительно больше, так как угол учитывается в алгоритме формирования оценки измеряемого ускорения. Кроме того, в заявляемом способе противодействующая пружина отключается перед началом измерения, поэтому ее нестабильность и нелинейность не сказываются на точности определения измерения. Это обеспечивает более высокую точность, чем в прототипе.
Повышенная точность заявляемого способа обеспечивается за счет алгоритмической автокомпенсации влияния уходов измерительного преобразователя (в примере ФД) на результат измерения. Как следует из выражения (1), результат измерения не зависит от начального положения Хомаятника, т.е. от аддитивных уходов ФД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МАССЫ РЫЧАЖНЫМИ ВЕСАМИ | 1991 |
|
RU2017078C1 |
| УСТРОЙСТВО ТЕРМОКОМПЕНСАЦИИ КВАРЦЕВОГО ГЕНЕРАТОРА | 1990 |
|
RU2007839C1 |
| СИСТЕМА ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ | 1994 |
|
RU2065619C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ | 1991 |
|
RU2029968C1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1985 |
|
SU1328672A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2006378C1 |
| ЦИФРОВОЙ ГРАВИМЕТР | 1994 |
|
RU2095829C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА КАНАЛОВ РАДИОСВЯЗИ | 1990 |
|
RU2010429C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ВЗВЕШИВАНИЯ | 1991 |
|
RU2068987C1 |
| СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ СДВИГА ШКАЛ ВРЕМЕНИ | 1990 |
|
RU2017194C1 |

Использование: в акселерометрии, в частности для определения ускорения движения различных объектов ( в том числе и летательных аппаратов). Сущность изобретения: после приведения маятника в исходное положение отключают противодействующую пружину, в процессе свободного углового движения маятника задают два равных временных интервала, измеряют три угловых положения маятника, соответствующих границам интервалов, и определяют косинусы первого и второго углового положения, на основании чего с учетом известных момента инерции и расположения центра маятника рассчитывают искомые ускорение. 2 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ, включающий регистрацию углового отклонения от исходного положения маятника, управляемого с помощью противодействующей пружины, отличающийся тем, что после приведения маятника в исходное положение противодействующую пружину отключают, в процессе свободного углового движения маятника задают два равных временных интервала и измеряют три угловых положения α1,α2,α3 маятника, соответствующих границам интервалов, определяют косинусы первого и второго угловых положений (cosα1,cosα2), а искомое ускорение W рассчитывают по зависимости
где m, J масса и момент инерции маятника;
l расстояние от оси вращения до центра масс маятника;
τ длительность каждого из задаваемых временных интервалов.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Цифровые и аналоговые интегральные микросхемы | |||
| Справочник М.: Радио и связь, 1989, с.496. | |||
