Изобретение относится к комплексным системам управления, включающим как инерциальные устройства, так и радиотехнические устройства управления беспилотными аппаратами.
Одним из основных требований к системам данного назначения является обеспечение необходимой точности выведения беспилотного летательного аппарата в заданную точку пространства, например радиоконтрастную.
Известна система аналогичного назначения, содержащая радиотехническое средство для измерения координат и параметров движения цели, кинематическое звено, координатор, входным воздействием для которого являются параметры движения линии визирования управляемый объект объект назначения, выдаваемые кинематическим звеном. На другой вход координатора с управляемого объекта поступают параметры и координаты его действительного движения. В результате сравнения входных сигналов в координаторе формируются команды управления движением управляемого объекта к объекту назначения (Справочник по радиоэлектронике. Под ред. А. А. Куликовского, т. 3. М. Энергия, 1970, с. 559).
Недостатком этой системы является то, что вывод беспилотного летательного аппарата к объекту назначения возможен лишь при наличии информации о координатах и параметрах движения последнего, а также запуск его с неподвижного основания.
Наиболее близкой по технической сущности к предлагаемой является система, содержащая пункт управления, первое и второе кинематические звенья, координатор, включающий радиолокационную станцию, устройство сравнения, радиоаппаратуру, исполнительное устройство и управляемый объект (Справочник по радиоэлектронике. /Под ред. А. А. Куликовского, т. 3, М. Энергия, 1970, с. 560, рис. 27-3).
Входным воздействием для РЛС являются параметры движения линии пункт управления объект назначения, пространственное положение этой линии, на которой должен находиться центр масс управляемого объекта. Параметры движения линии пункт управления объект назначения вырабатываются первым кинематическим звеном. Эта информация является входным воздействием для РЛС, где она преобразуется в параметры движения радиолуча (равносигнального направления). Угол рассогласования между равносигнальным направлением и линией пункта управления управляемый объект, определяемый вторым кинематическим звеном, является входным воздействием для радиоаппаратуры, в которой вырабатываются сигналы, пропорциональные линейным отклонениям управляемого объекта от равносигнального направления в двух взаимно перпендикулярных плоскостях управления. Из этих сигналов в исполнительном устройстве формируются сигналы управления управляемым объектом.
Однако при запуске беспилотного летательного аппарата с подвижного носителя в системе управления аппаратом не учитываются параметры движения носителя, что в конечном итоге существенно снижает точность выведения управляемого объекта к объекту назначения.
Этот недостаток существенно снижен в предлагаемой комплексной системе. Сущность изобретения заключается в том, что в систему управления, содержащую устройство выработки сигналов управления, подключенное по выходам углов крена, курса, тангажа и высоте к соответствующим входам исполнительного устройства, радиолокационный визир, подключенный по выходам рассогласований углов тангажа и курса, дальности и сигнала управления и соответствующим входам устройства выработки сигналов управления, а по входам сигналов скорости и включения радиолокационного визира и соответствующим выходам устройства выработки сигналов управления, входы которого по сигналам скорости, дальности и углов тангажа, курса и крена соединены с соответствующими выходами инерциального навигационного устройства, включающего гиростабилизированную платформу и первый блок акселерометров, подключенные к соответствующим входам вычислителя, при этом первый и второй управляющие входы инерциального навигационного устройства соединены соответственно с первым и вторым выходами пункта управления, в нее введены блок варьирования акселерометров, блок выработки сигналов выставки гиростабилизированной платформы, блок корректировки паспортных данных инерциальных блоков, задатчик состава параметров навигационного комплекса носителя, задатчик положения точки подвеса платформы, задатчик паспортных данных инерциальных блоков, радиовысотометр и устройство корректировки высоты и вертикальной скорости, при этом в инерциальное навигационное устройство введен второй блок акселерометров, установленный на гиростабилизированной платформе, выполненный в виде двух акселерометров, установленных по горизонтальным осям гиростабилизированной платформы, коллинеарных осям соответствующих акселерометров первого блока акселерометров, причем первый блок акселерометров выполнен на основе струнных акселерометров, а второй блок акселерометров выполнен на основе маятниковых акселерометров, подключенных к соответствующим входам вычислителя инерциального навигационного устройства, а пункт управления содержит навигационный комплекс носителя, пульт управления и таймер, первый выход которого подключен к первому входу навигационного комплекса носителя и соединен с вторым выходом пункта управления, третий выход таймера соединен с третьим входом навигационного комплекса носителя, второй выход таймера является третьим выходом пункта управления, а его управляемый вход подключен к третьему выходу пульта управления, четвертый выход которого через пятый выход пункта управления подключен к шестому входу устройства выработки сигналов управления, пятый выход пульта управления является шестым выходом пункта управления, а его первый вход первым выходом пункта управления, вход которого, подключенный к четвертому выходу блока выработки сигналов выставки гиростабилизированной платформы, соединен с входом пульта управления, второй выход которого подключен к второму входу навигационного комплекса носителя, выходы параметров движения которого по магистрали соединены с первыми группами входов блока выработки сигналов выставки гиростабилизированной платформы и блока тарировки акселерометров, первый, второй и третий выходы которого подключены соответственно к седьмому, восьмому и девятому входам вычислителя инерциального навигационного устройства, третий, четвертый и пятый входы гиростабилизированной платформы инерциального навигационного устройства по сигналам выставки подключены соответственно к первому третьему выходам блока выработки сигналов выставки гиростабилизированной платформы, второй вход которого объединен с вторым входом блока тарировки акселерометров и подключен к выходу задатчика состава параметров навигационного комплекса, третья группа входов блока выработки сигналов выставки гиростабилизированной платформы магистрально соединена с первым, вторым и третьим выходами задатчика положения точки подвеса платформы, четвертая группа из пяти входов блока выработки сигналов выставки гиростабилизированной платформы магистрально соединена с выходами с первого по пятый блока коррекции паспортных данных, а пятый его вход объединен с пятым входом блока тарирования акселерометров и подключен к третьему выходу пункта управления, первая группа входов блока коррекции паспортных данных соединена с соответствующими выходами задатчика паспортных данных инерциальных блоков, а вторая группа из восьми входов указанного блока коррекции соединена с соответствующими выходами, с тремя выходами гиростабилизированной платформы, с тремя выходами блока маятниковых акселерометров и с двумя выходами блока струнных акселерометров, при этом третья группа из пяти входов блока тарировки акселерометров соединена с соответственно с четвертого по восьмой выходами блока коррекции паспортных данных, причем радиовысотомер, подключенный входом к восьмому выходу устройства выработки сигналов управления, первым и вторым выходами соединен соответственно с третьим и четвертым входами устройства коррекции высоты и вертикальной скорости, подключенного двумя выходами к седьмому и восьмому входам устройства выработки сигналов управления, а первым и вторым входам к соответствующим выходам вычислителя инерциального навигационного устройства.
Благодаря введению в предлагаемую систему блока выработки сигналов выставки гиростабилизированной платформы, блока тарировки установленных на ней трех маятниковых и двух струнных акселерометров, блока коррекции паспортных данных инерциальных блоков выставляемой гироплатформы, а также задатчика состава параметров, выдаваемых навигационным комплексом носителя, характеризующих движения последнего, задатчика положения (отстояния) точке подвеса выставляемой гироплатформы относительно точки подвеса гироплатформы навигационного комплекса носителя и задатчика паспортных данных инерциальных блоков, установленных на гироплатформе инерциального навигационного устройства, обеспечиваются:
более точное горизонтирование выставляемой гироплатформы с учетом параметров движения носителя, рассогласования точек подвеса выставляемой гироплатформы и паспортных данных установленных на ней инерциальных блоков;
более точная ориентация выставляемой гироплатформы в заданном азимутальном направлении, т. е. в плоскости, проходящей через точку подвеса гироплатформы и точку нахождения объекта назначения с учетом указанной выше информации, используемой при горизонтировании платформы;
тарировка установленных на выставляемой гироплатформе трех маятниковых и двух струнных акселерометров.
Благодаря этому инерциальное навигационное устройство, установленное на летательном аппарате, выдает более точные данные, по которым устройство выработки сигналов управления движением летательного аппарата формирует более точные команды управления и тем самым создает условия для более уверенного обнаружения радиолокационным визиром (РЛВ) объекта назначения и последующего перехода на управление по сигналам РЛВ, как более точным.
Введение в систему радиовысотомера как более точного инструмента измерения высоты позволяет с помощью введенного устройства коррекции высоты и вертикальной скорости корректировать более грубые показания инерционального измерителя высоты и тем самым более точно управлять движением летательного аппарата по высоте, в том числе и по сложной траектории полета.
На фиг. 1 показана структурная схема предлагаемой системы; на фиг. 2 пример схемного построения пульта управления, входящего в состав пункта управления; на фиг. 3 блок-схема алгоритма выработки сигналов блоком коррекции паспортных данных; на фиг. 4 схема блока тарировки акселерометров; на фиг. 5 схема блока выработки сигналов выставки гиростабилизированной платформы инерционального навигационного устройства; на фиг. 6 блок-схема алгоритма выработки выходных сигналов блоком формирования требуемых углов, входящим в состав блока выработки сигналов выставки; на фиг. 7 блок-схема алгоритма выработки выходных сигналов блоком формирования углов отклонения, входящим в состав блока выработки сигналов выставки; на фиг. 8 схема устройства коррекции высоты и вертикальной скорости; на фиг. 9 схема устройства выработки сигналов управления.
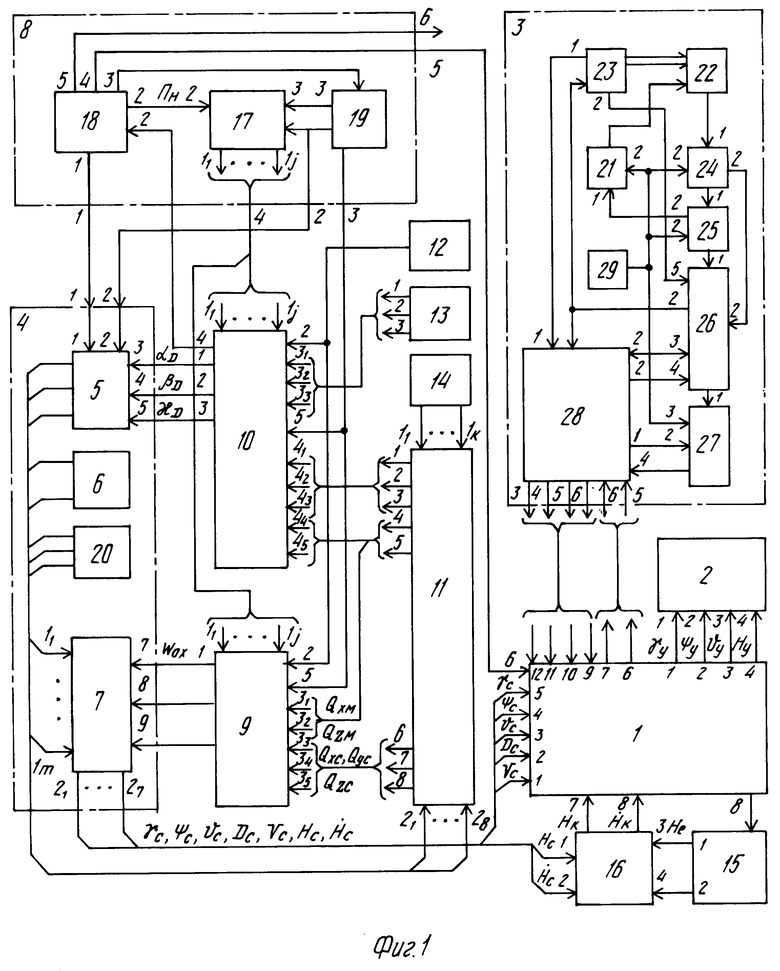
На фиг. 1 обозначены: устройство 1 выработки сигналов управления (УВСУ), исполнительное устройство (ИУ) 2, радиолокационный визир (РЛВ) 3, инерциальное навигационное устройство (ИНУ) 4, гиростабилизированная платформа (ГСП) 5, блок 6 маятниковых акселерометров (БМА), вычислитель 7, пункт 8 управления, блок 9 тарировки акселерометров (БТА), блок 10 выработки сигналов выставки гиростабилизированной платформы (БВСВ ГСП), блок 11 коррекции паспортных данных (БКПД), задатчик 12 состава параметров навигационного комплекса (ЗСПНК), задатчик 13 положения точки подвеса платформы (ЗПТПП), задатчик 14 паспортных данных инерциальных блоков (ЗПДИБ), радиовысотомер (РВ) 15, устройство 16 коррекции высоты и вертикальной скорости (УКВ и ВС), навигационный комплекс носителя (НКН) 17, пуль управления 18; таймер (Т-Р) 19, блок 20 струнных акселерометров (БСА).
В соответствии со схемой на фиг. 1 в системе устройство 1 выработки сигналов управления (УВСУ) выходами углов крена, курса и тангажа, а также по высоте (выходы 1-4, подключено соответственно к входам 1-4 исполнительного устройства 2, входами 9-12 к выходам 6-3 соответственно дальности, сигнала управления (СУ), углов рассогласования тангажа (Δv) и курса (ΔΨ) радиолокационного визира 3 (РЛВ). Выходы 6 и 7 устройства 1 соединены соответственно с входами 5 и 6 РЛВ 3 (входы "Вкл. РЛВ" и скорость V), шестой вход устройства 1 подключен к пятому выходу пункта 8 управления, а его восьмой выход соединен с входом радиовысотомера 15, первый и второй выходы которого подключены соответственно к третьему и четвертому входам устройства 16 коррекции высоты и вертикальной скорости (УВВ и ВС), два выхода которого соединены соответственно с седьмым и восьмым входами УВСУ 1, а его первый и второй входы соединены соответственно с шестым и седьмым выходами второй группы выходов вычислителя 7 ИНУ 4. Выходы вычислителя 7 второй группы с первого по пятый соединены соответственно с входами с пятого по первый УВСУ 1, а его седьмой, восьмой и девятый входы соединены соответственно с первым, вторым и третьим выходами блока 9 тарировки акселерометров. Первая группа входов вычислителя 7 подключена соответственно к трем выходам ГСП 5, трем выходам БМА 6, двум выходам БСА 20 и соединена с второй группой из восьми входов блока 11 коррекции паспортных данных, первая группа которого подключена к соответствующим выходам задатчика 14. Выходы блока 11 с первого по пятый соединены с четвертой группой из пяти входов блока 10, а выходы блока 11 с четвертого по восьмой подключены соответственно к третьей группе из пяти входов блока 9. Пятый вход блока 9 объединен с пятым входом блока 10 и подключен к третьему выходу пункта 8 управления, а второй его вход объединен с вторым входом блока 10 и подключен к выходу задатчика 12. Третья группа из трех входов блока 10 соединена соответственно с первым, вторым и третьим выходами задатчика 13, а первая группа его входов объединена с соответствующими входами блока 9 и по магистрали подсоединена к четвертому выходу пункта 8 управления (выходы параметров движения носителя). Первый, второй и третий выходы блока 10 по сигналам выставки подключены соответственно к третьему, четвертому и пятому входам ГСП 5, а четвертый его выход соединен с входом пункта 8 управления, первый выход которого через первый вход ИНУ 4 соединен с первым входом ГСП 5, второй вход которой через второй вход ИНУ 4 подключен к второму выходу пункта 8 управления. В пункте 8 управления таймер 19 первым выходом подключен к первому входу НКН 17 и является вторым выходом пункта 8, а третьим выходом подключен к третьему входом НКН 17, второй выход таймера 19 является третьим выходом пункта 8 управления, а его управляющий вход подключен к третьему выходу пульта 18 управления, четвертый выход которого является пятым выходом пункта 8 управления, пятый выход пульта 18 является шестым выходом пункта 8 управления. Первый вход пульта 18 подключен к первому выходу пункта 8, вход которого соединен с входом пульта 18, второй выход которого подключен к второму входу НКН 17, группа выходов которого является выходами параметров движения носителя, и подключена магистрально к четвертому выходу пункта 8 управления.
Радиолокационный визир 3 (фиг. 1) содержит передатчик 21 (ПРК), подключенный выходом к входу антенны 22 (Ант), кинематически связанной с приводом 23 антенны (Пр. А), выход которой связан через последовательно соединенные приемник 24 (ПРМ), устройство 25 внутриимпульсной обработки (УВИО) и устройство 26 первичной обработки информации (УПОИ) с первым входом буферного запоминающего устройства 27 (БЗУ). Выход БЗУ 27 подключен к четвертому входу устройства 28 обмена информацией (УОИ), выходы которого с третьего по шестой являются соответствующими выходами РЛВ 3, а его пятый и шестой входы соответствующими входами РЛВ 3. Первый вход УОИ 28 подключен к первому выходу привода 23 антенны, а его третий вход объединен с входом привода 23 и соединен с вторым входом УПОИ 26, пятый вход которого подключен к второму выходу привода 23 антенны, а его третий вход соединен с шиной синхронизации, к которой также подключены вторые входы передатчика 21, приемника 24, устройства 25, устройства 28, буферного запоминающего устройства 27 и выход синхронизатора 29 (С). Второй выход устройства 25 подключен к первому входу ПРК 21, четвертый вход устройства 26 соединен с вторым выходом УОИ 28, первый выход которого подключен к второму входу буферного запоминающего устройства 27, а второй выход приемника 24 соединен с вторым входом УПОИ 26, четвертый вход которого соединен с вторым входом УОИ 28.
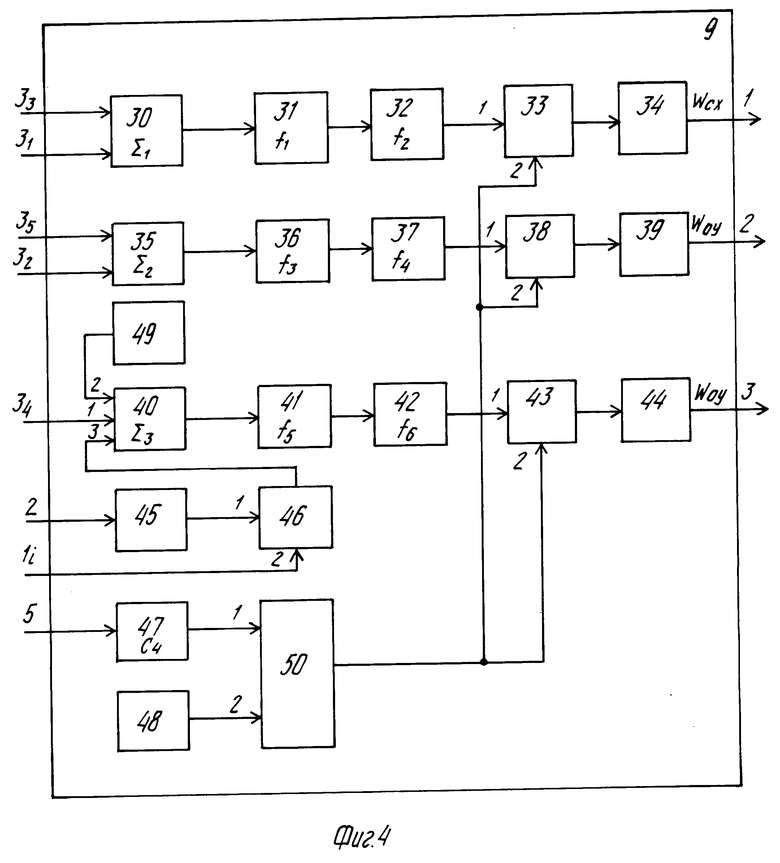
Блок 9 тарировки акселерометров (фиг. 4) содержит последовательно соединенные сумматор 30, интегратор 31, интегратор 32, управляемый ключ 33 (УК1) и блок 34 памяти (БП1), выход которого является первым выходом блока 9, последовательно соединенные сумматор 35, интегратор 36, интегратор 37, управляемый ключ 38 (УК2) и блок 39 памяти (БП2), выход которого является вторым выходом блока 9, и последовательно соединенные сумматор 40, интегратор 41, интегратор 42, управляемый ключ 43 (УК3) и блок 44 памяти (БП3), выход которого является третьим выходом блока 9. Блок 9 также содержит дешифратор 45 (ДШ), управляемый ключ 46 (УК4), счетчик 47 (Сч), задатчик 48 времени тарировки (ЗВТ), задатчик 49 ускорения силы тяжести (ЗУСТ) и коммутатор 50, выход которого подключен к вторым входам ключей 33, 38, 43, второй вход коммутатора 50 соединен с выходом задатчика 48, а первый его вход связан через счетчик 47 с пятым входом блока 9, первая группа входов которого соединена с вторым входом управляемого ключа 46, первый вход которого связан через дешифратор 46 с вторым входом блока 9, а его выход подключен к третьему входу сумматора 40, второй вход которого подключен к выходу задатчика 49 ускорения силы тяжести, а его первый вход соединен с четвертым из третьей группы входов блока 9, при этом первый и третий входы третьей группы подключены к входам сумматора 30, а второй и пятый входы этой группы соединены с входами сумматора 35.
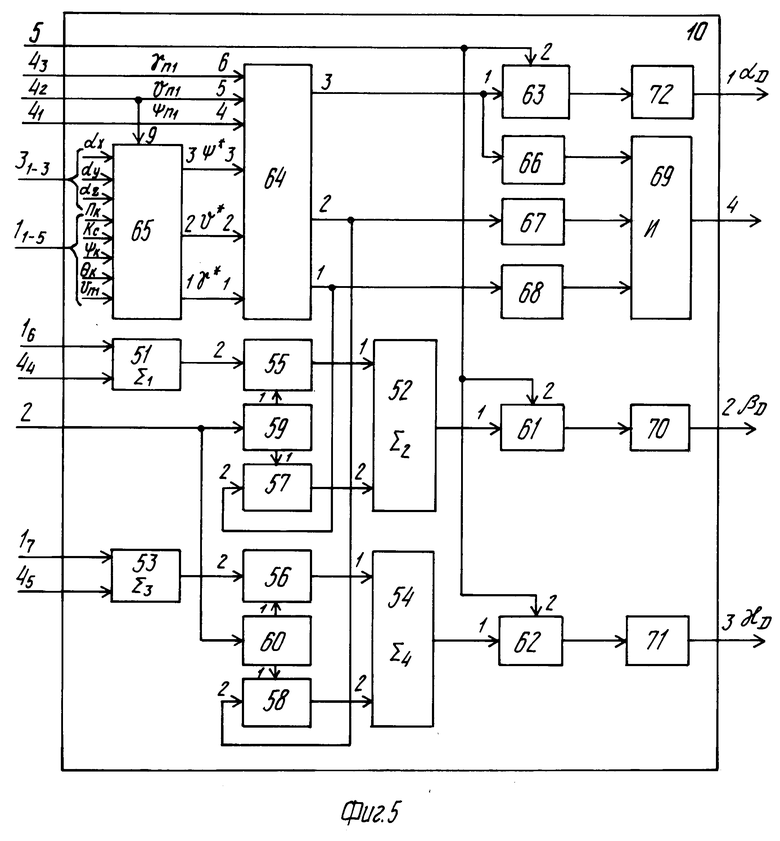
Блок 10 выработки сигналов выставки гиростабилизированной платформы (фиг. 5) содержит сумматоры 51-54, блоки 55-58 переменных коэффициентов (БПК1-4), дешифраторы 59 и 60 (ДШ1-2), управляемые ключи 61, 62 и 63 (УК1-3), блок 64 формирования углов отклонения (БФУО), блок 65 формирования требуемых углов (БФТУ) и пороговые устройства 66, 67 и 68 (ПОУ1-3), выходы которых связаны через логический элемент И 69 с четвертым выходом блока 10, при этом выходы ключей 61, 62 и 63 связаны через блоки 70, 71 и 72 памяти (БП1-3) соответственно с вторым, третьим и первым выходами блока 10. Входами блоки 70, 71 и 72 подключены соответственно к выходам ключей 61, 62 и 63, вторые входы которых объединены и соединены с пятым входом блока 10, первые входы ключей 61 и 62 подключены к выходам соответственно сумматоров 52 и 54. Первый вход ключа 63 объединен с входом порогового устройства 66 и подключен к третьему выходу блока 64, первый и второй выходы которого подключены соответственно к входам порогового устройства 68 и 67 и соединены соответственно с вторыми входами блоков 57 и 58 переменных коэффициентов, выходы которых подключены соответственно к вторым входам сумматоров 52 и 54, первые входы которых соединены с выходами соответственно блоков 55 и 56 переменных коэффициентов, вторые входы которых подключены к выходам соответственно сумматоров 51 и 53. Первые входы блоков 55 и 57 соединены с выходами дешифратора 59, а первые входы блоков 56 и 58 соединены с выходами дешифратора 60. Два входа сумматора 51 соединены соответственно с шестым входом первой группы и с четвертым входом четвертой группы блока 10, а два входа сумматора 53 подключены соответственно к седьмому входу первой группы и пятому входу четвертой группы входов блока 10. Пять входов блока 65 соединены соответственно с первыми пятью входами первой группы входов блока 10, три других входа блока 65 подключены соответственно к первым трем входам третьей группы входов блока 10, первый, второй и третий выходы блока 65 соединены соответственно с первым, вторым и третьим входами блока 64, входы которого с четвертого по шестой связаны соответственно с входами с первого по третий четвертой группы входов блока 10, причем второй вход четвертой группы соединен также с девятым входом блока 65. Входы дешифраторов 59, 60 подключены к второму входу блока 10.
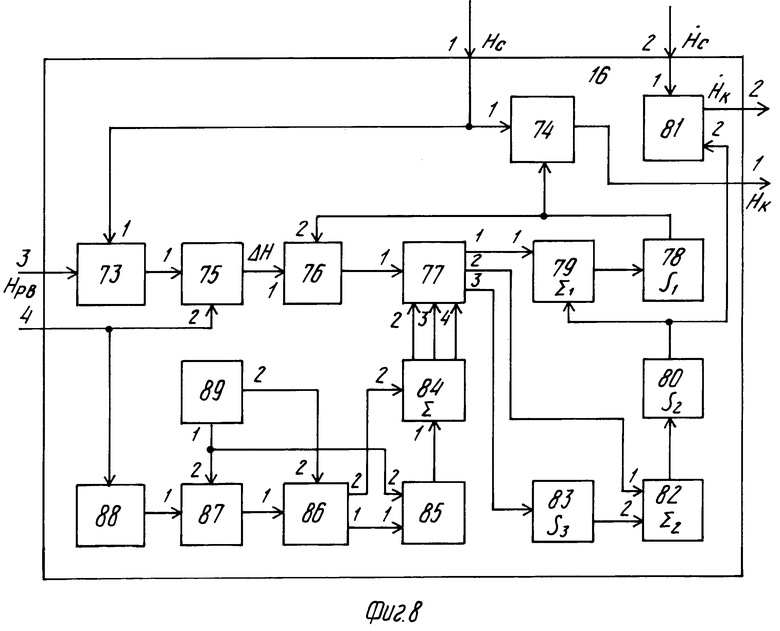
Устройство 16 коррекции высоты и вертикальной скорости содержит (фиг. 8) блок 73 разности, первый вход которого объединен с первым входом блока 74 разности (БР3) и является первым входом устройства 16, выход блока 74 является первым выходом устройства 16. Второй вход блока 73 является третьим входом блока 16, а его выход через управляемый ключ 75 связан с первым входом блока 76 разности, выход которого соединен с первым входом блока 77 умножителей, а второй его вход объединен с вторым входом блока 74 и подключен к выходу интегратора 78, подключенного входом к выходу сумматора 79, второй вход которого соединен с выходом интегратора 80 и подключен к второму входу блока 81 разности, первый вход которого подключен к второму входу устройства 16, а его выход соединен с вторым выходом устройства 16. Вход интегратора 80 соединен с выходом сумматора 82, первый вход которого подключен к второму выходу блока 77, первый вход которого соединен с первым входом сумматора 79. Второй вход сумматора 82 связан через интегратор 83 с третьим входом блока 77 умножителей, второй, третий и четвертый входы которого подключены к соответствующим выходам блока 84 сумматоров, первый вход которого подключен к выходу умножителя 85, подключенного первым входом к первому выходу блока 86 ключей, второй выход которого соединен с вторым входом блока 84 сумматоров, а его первый вход связан через последовательно соединенные блок 87 пороговых элементов (БПЭ) и таймер 88 с вторым входом ключа 75 и с четвертым входом устройства 16. Второй вход умножителя 85 подключен к второму входу блока 87 и к первому выходу блока 89 памяти, второй выход которого соединен с вторым входом блока 86 ключей.
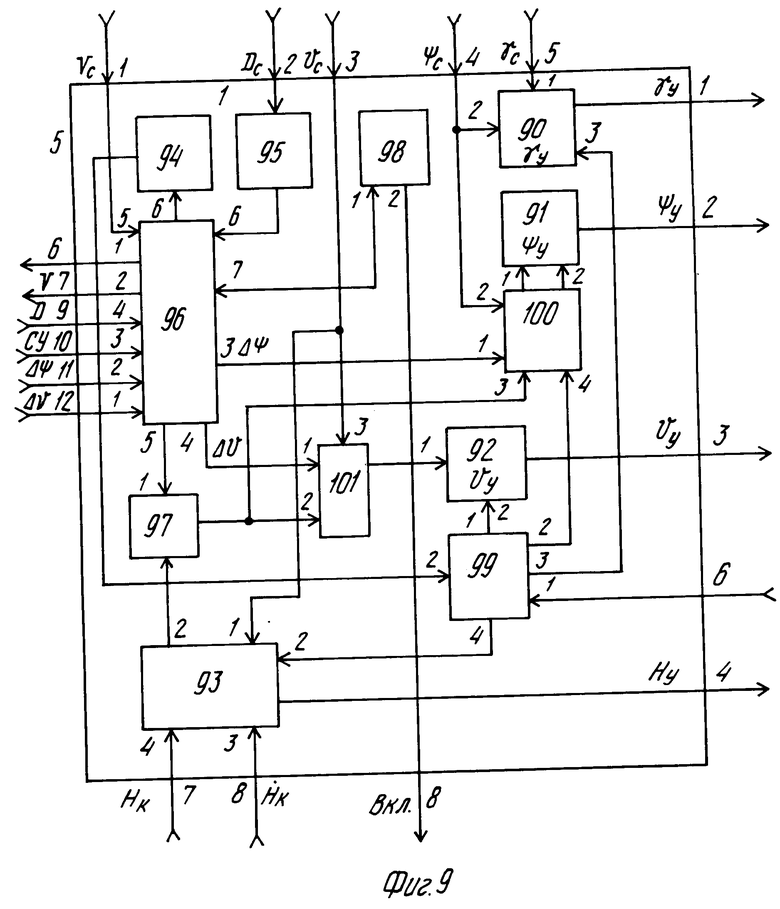
Устройство 1 выработки сигналов управления (фиг. 9) содержит блоки 90-93 выработки сигналов управления соответственно по крену, курсу, тангажу и высоте, выходы которых являются соответственно первым, вторым, третьим и четвертым выходами устройства 1, два пороговых элемента 94 и 95 (ПЭ1, ПЭ2), устройство 96 обмена информацией (УОИ), ключ 97, таймер 98, программный блок 99 и два управляемых переключателя 100 и 101, при этом входы устройства 96 c первого по четвертый подключены соответственно к двенадцатому, одиннадцатому, десятому и девятому входам устройства 1, пятый вход УОИ 96 соединен с первым входом устройства 1, шестой вход связан через пороговый элемент 95 с вторым входом устройства 1, а седьмой вход УОИ 96 подключен к первому выходу таймера 98, второй выход которого соединен с восьмым выходом устройства 1. Первый и второй выходы УОИ 96 подключены соответственно к шестому и седьмому выходам устройства 1, третий и четвертый выходы УОИ 96 соединены с первыми входами соответственно первого и второго управляемых переключателей 100 и 101, пятый выход УОИ 96 связан через ключ 97, подключенный вторым входом к второму выходу блока 93 (БВСУ Hy), с вторым и третьими входами соответственно переключателей 101 и 100, а шестой выход УОИ 96 связан через пороговый элемент 94 с вторым входом программного блока 99, третий вход УВСУ 1 соединен с третьим входом переключателя 101 и с первым входом блока 93, третий и четвертый входы которого соединены соответственно с восьмым и седьмым входами устройства 1, а его второй вход соединен с четвертым выходом программного блока 99, вход которого является шестым входом устройства 1. Первый выход блока 99 подключен к второму входу блока 92 (БВСУ νy), первый вход которого соединен с выходом переключателя 101, второй выход блока 99 соединен с четвертым входом переключателя 100, первый и второй выходы которого подключены к соответствующим входам блока 91. Третий выход блока 99 соединен с третьим входом блока 90, первый вход которого подключен к пятому входу устройства 1, а второй его вход объединен с вторым входом переключателя 100 и подключен к четвертому входу устройства 1.
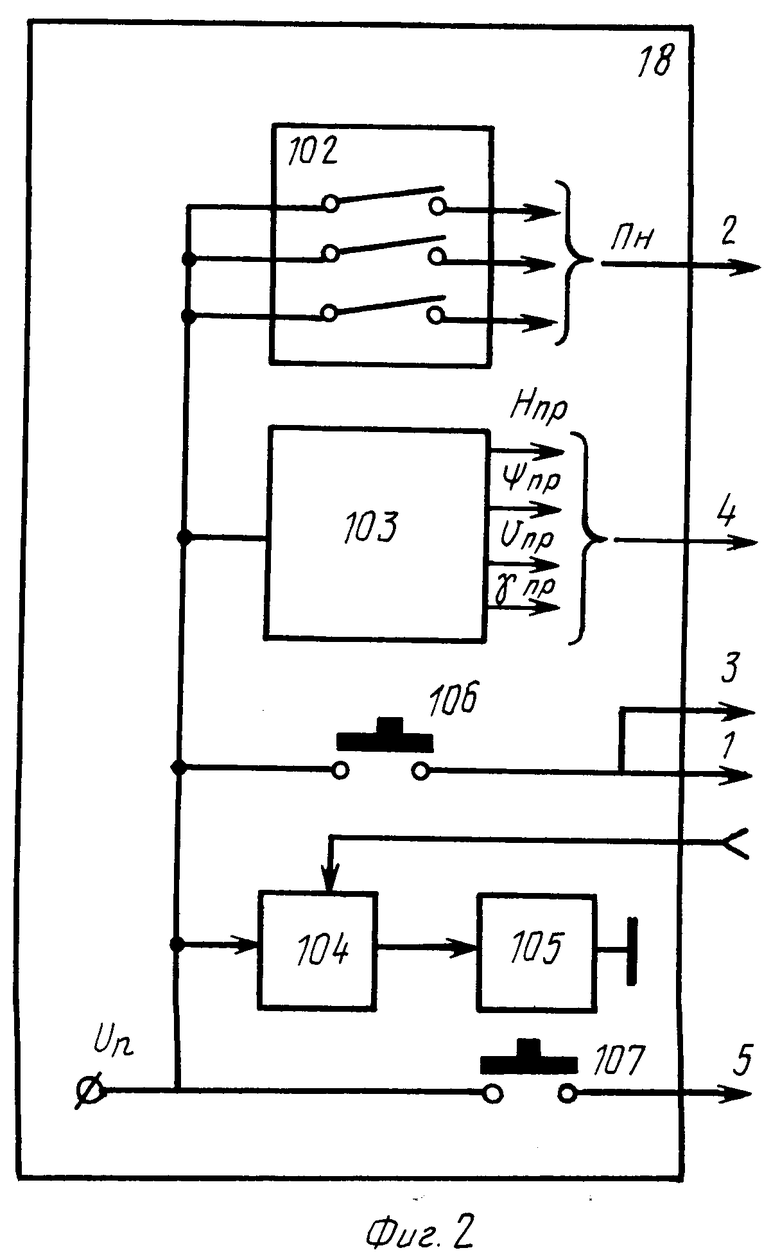
Пульт 18 управления (фиг.2) содержит клавишный регистр 102, программатор 103, ключ 104, табло 105, а также кнопки 106 и 107, при этом входы клавишного регистра 102, программатора 103, ключа 104, а также контакты кнопок 106 и 107 связаны с источником питания, выходы регистра 102 подключены к второй выходной магистрали пульта 18, выходы программатора 103 к четвертой магистрали, управляющий вход ключа соединен с входом пульта 18, а его выход подключен к входу табло 105. Кнопки 106 и 107 связаны с управляющими выходами пульта 18.
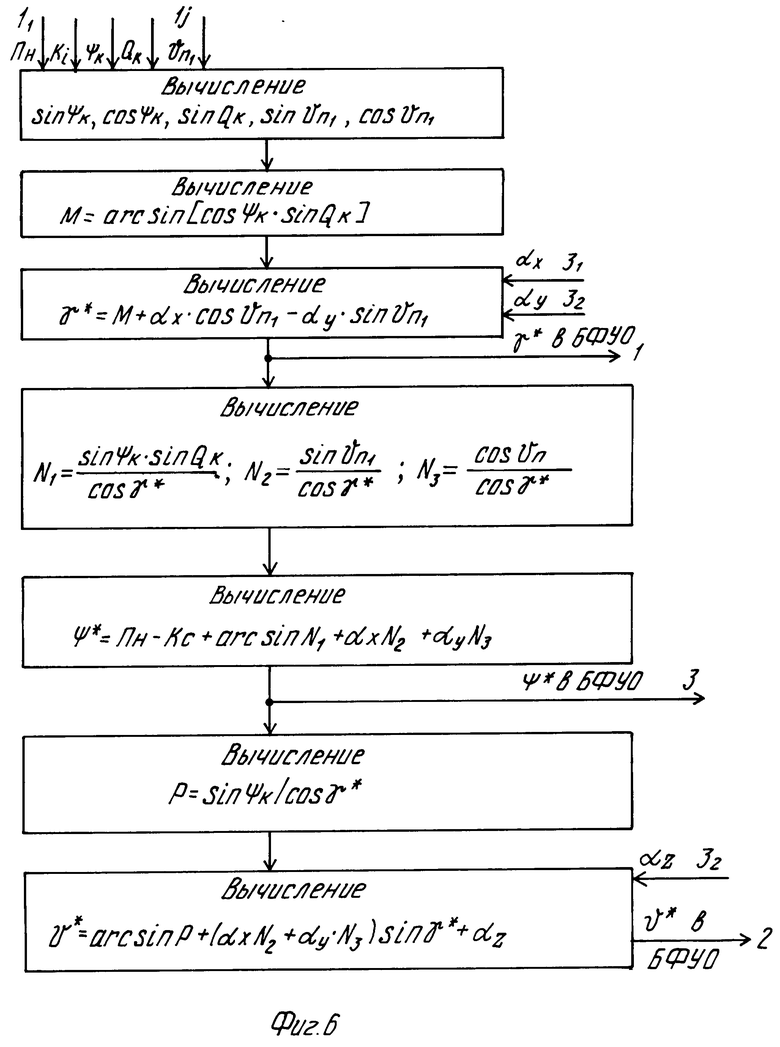
Предлагаемая система работает следующим образом. По априорно известным данным в задатчик 12 записывается код, соответствующий составу параметров движения носителя, выдаваемых навигационным комплексом 17. В задатчик 13 записываются координаты αx, αy, αz точки подвеса гиростабилизированной платформы 5 относительно точки подвеса платформы навигационного комплекса 17 носителя, а в задатчик 14 заносятся паспортные данные систематических погрешностей масштабных коэффициентов и систематических погрешностей установки маятниковых и струнных акселерометров 6, 20, установленных на ГСП 5. Из программатора 103 пульта 18 управления в программный блок 99 устройства 1 выработки сигналов управления заносятся программные значения углов курса Ψпр, тангажа νпр и крена γпр, а также высоты Hпр. Нажатием кнопки 106 пульта 18 по первому выходу выдается команда на разгон гироскопов ГСП 5, а по третьему выходу команда на запуск таймера 19. Время разгона гироскопов ГСП 5 задается таймером 19 путем выдачи последним на второй вход ГСП 5 соответствующего сигнала. По сигналам с третьего выхода таймера 19 навигационный комплекс 17 периодически выдает на группу выходов 11-1j сигналы, соответствующие параметрам движения носителя, в частности угла рыскания Kc, угла качки по дифференту Ψk, угла качки по крену Qk и угла тангажа ν n1. Кроме того, по одному из выходов указанной группы выдается сигнал, соответствующий заданному пеленгу Пн наведения ГСП 5. Эти сигналы поступают на соответствующие входы блока 10 выработки сигналов выставки ГСП и блока 9 тарировки акселерометров. Сигналы с датчиков углов ГСП 5, а также сигналы с выходов блоков 6 и 20 маятниковых и струнных акселерометров выдаются в вычислитель 7 инерциального навигационного устройства и в блок 11 корректировки паспортных данных датчиков углов и акселерометров. В блоке 11 в соответствии с блок-схемой алгоритмов, приведенной на фиг. 3, сначала в показаниях датчиков углов Ψn, ν n, γn учитываются паспортные данные погрешностей Ψпо, ν по, γпо установки этих датчиков на соответствующих осях карданова подвеса ГСП 5, а затем в показаниях маятниковых Qxм, Qzм и в показаниях струнных Qxс, Qyс, Qzсакселерометров компенсируются систематические погрешности соответственно δMxм, δMzм, δMxс, δMyс и δMzс их масштабных коэффициентов, после чего компенсируются систематические погрешности δx, δz, δп1, δп2, δп3, δп4и δп5 установки маятниковых и струнных акселерометров. Откорректированные показания датчиков углов Ψп1, νп1, γп1 и показания маятниковых акселерометров Qxм2, Qzм2 поступают на соответствующие входы блока 10 выработки сигналов выставки ГСП. На второй вход блока 10 из задатчика 12 выдается код, соответствующий составу навигационных параметров, поступающих на первую группу входов блока 10. На третью группу входов 31-33 из задатчика 13 поступают сигналы α x, α y, αz, соответствующие положению точки подвеса ГСП 5 относительно начала системы координат, связанной с носителем. По сигналам, поступающим на пятый вход блока 10 с таймера 19, начинается выработка сигналов α D, βD и κD выставки гиростабилизированной платформы 5 в необходимое положение в пространстве. Выработка этих сигналов осуществляется в соответствии с блок-схемой алгоритмов, приведенной на фиг. 6. В частности, сигналы пеленга наведения Пн, угла рыскания носителя Kс, угла качки Ψк по дифференту, по крену Qк и тангажу ν п1, а также сигналы систематических погрешностей αx, αy, αz поступают на входы блока 65 формирования требуемых углов (фиг. 5). По указанной информации в соответствии с блок-схемой алгоритма, приведенной на фиг. 6, определяются значения требуемых углов Ψ*, ν *, γ* разворота колец карданова подвеса, а именно по следующим математическим зависимостям:
Ψ*=Пн-Kc+arcsin + αx
+ αx + αy
+ αy ,
,
γ*=arcsin(cosΨк·sinQк)+αxcos -αysin
-αysin ,
,
ν*=arcsin + αxsin
+ αxsin tgγ*+αycos
tgγ*+αycos tgγ*+αz.
tgγ*+αz.
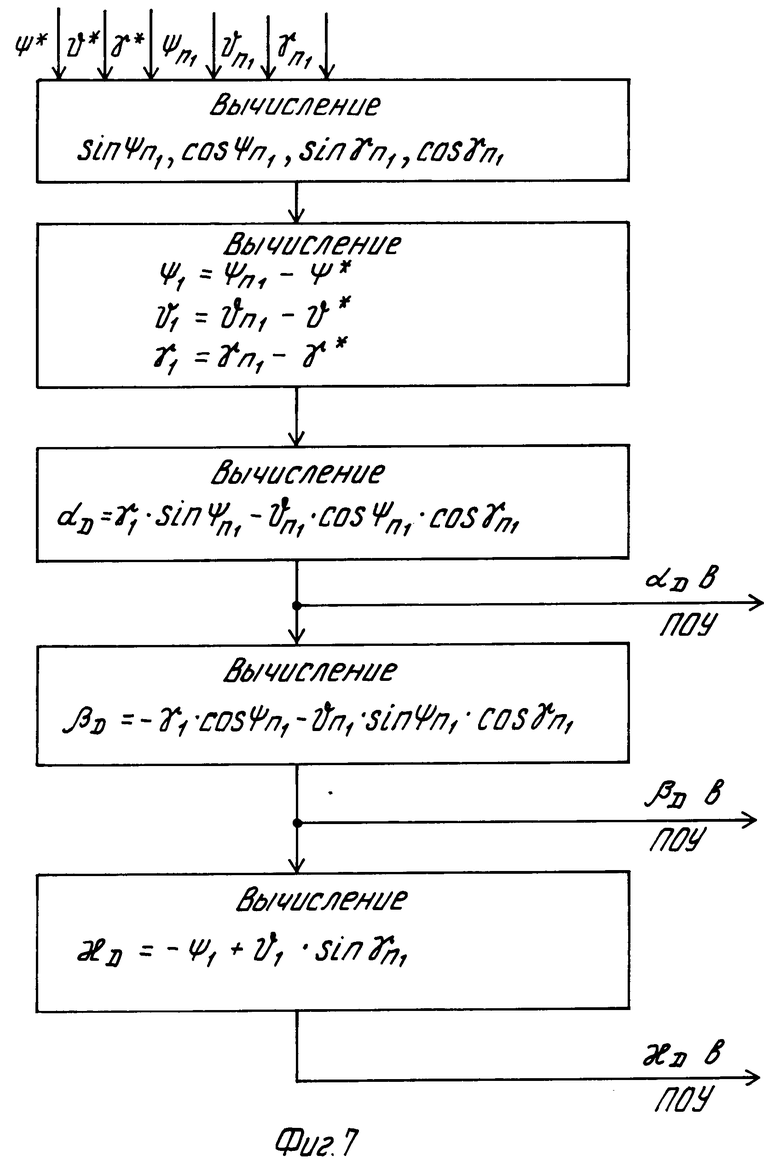
Эти сигналы совместно с сигналами Ψп1, νп1, γп1, полученными из блока 11, поступают в блок 64 формирования углов отклонения (фиг. 5), где в соответствии с блок-схемой алгоритмов, приведенной на фиг. 7, формируются сигналы αD, βD, κD отклонения ГСП 5 от стартовой системы координат Oxс, Oyс, Ozс, оси которых фиксируются следующим образом:
OYс вверх по местной вертикали;
OXс перпендикулярно оси OYс в плоскости, проходящей через ось OYси точку, в которую должен быть выведен управляемый объект;
OZс дополняет систему координат до правой.
Значения углов αD, βD, κD определяются по следующим выражениям:
α D= (γп1- γ*)sin Ψп1-(νп1-
ν*) cos Ψп1cos γп1,
βD=-(γп1- γ*)cos Ψп1-(νп1-
ν*) sin Ψп1cos γп1,
κD=-( Ψ п1- Ψ *)+ ( νп1- ν*)sin γп1.
Если в НКН 17 вырабатывается и выдается информация только об углах Kс, Ψк и Qк, то в соответствии с кодом номера состава выдаваемых параметров, записанным в задатчике 12, дешифраторы 59 и 60 вырабатывают сигналы, по которым в блоках 57 и 58 установятся коэффициенты, равные единице, а в блоках 55 и 56 равные нулю. При этом на выходах сумматоров 52 и 54 и третьем выходе блока 64 сформируются сигналы, пропорциональные управляющим сигналам Gx, Gz, Gy, поступающим на соответствующие датчики момента ГСП 5. По запускающему импульсу, поступающему на пятый вход блока 10 с таймера 19 пункта 8 управления, открываются управляемые ключи 63, 61, 62 и в блоки 72, 70, 71 памяти происходит запись управляющих сигналов Gy, Gx, Gz, которые не изменяются до момента поступления на пятый вход блока 10 выработки сигналов выставки очередного запускающего импульса.
Значения углов αD, βD, κD сравниваются в пороговых устройствах 66, 67, 68 с заданными эталонными значениями и в момент одновременного достижения всеми указанными сигналами значений, меньших эталонных, с элемента И 69 на четвертый выход блока 10 в пульт 18 управления выдается сигнал об окончании процесса выставки ГСП 5 в требуемое пространственное положение.
Если в НКН 17 вырабатывается информация не только о значениях углов Kс, Ψк, Qк, но и, например, о значениях проекций Wx, Wz ускорения носителя на оси стартовой системы координат, то задатчик 12 выдает в блок 10 соответствующий код. В этом случае дешифраторы 59, 60 выдают сигналы, по которым в блоках 57 и 58 установится значение коэффициента передачи, равное η, а в блоках 55 и 56 значение коэффициента передачи, равное (1- η). В этом случае в выходных сигналах сумматоров 52 и 54 учитывается дополнительная информация о проекциях ускорения Wx, Wz, что существенно повышает точность начальной выставки ГСП 5 в требуемое положение.
При использовании в предлагаемой системе еще какой-либо дополнительной информации о параметрах движения носителя, которая может быть использована для повышения точности начальной выставки ГСП 5, структурную схему блока 10 необходимо соответственно дополнить.
Тарировка струнных акселерометров 20, обладающих существенными погрешностями при измерении малых значений ускорения осуществляется следующим образом. Откорректированные показания Qxс, Qyс, Qzс струнных акселерометров и показания Qxм, Qzм маятниковых акселерометров, обладающих более высокой точностью измерения малых значений ускорений и не обеспечивающих измерение больших значений ускорений, действующих на ЛА в процессе движения, из блока 11 поступают в блок 9 тарировки акселерометров, на первую группу входов которого из НКН 17 поступают сигналы о параметрах движения носителя. На второй вход блока 9 из задатчика 12 поступает код номера структуры навигационных параметров, выдаваемых с НКН 17, а на пятый вход блока 9 поступают сигналы с таймера 19. В блоке 9 определяется разность показаний между соответствующими маятниковыми и струнными акселерометрами, т. е. акселерометрами, расположенными, на каждой из горизонтальных осей. Полученные разности дважды интегрируются в течение заданного tт времени тарировки. Смещение нулей струнных акселерометров, расположенных по осям OXс и OZсопределяются по формулам:
Wox= 

 (Qxc-QxМ)dτ1dτ2,
(Qxc-QxМ)dτ1dτ2,
Woz= 

 (Qzc-QzМ)dτ1dτ2.
(Qzc-QzМ)dτ1dτ2.
Длительность тарировки tт задается задатчиком 48, а текущее время вычисляется счетчиком 47 по количеству запускающих импульсов, поступающих на пятый вход блока 9. При совпадении текущего времени со счетчика 47 со значением времени, записанным в задатчике 48, коммутатор 50 формирует выходной сигнал, по которому открываются ключи 33 и 38, в результате открывания которых значения величин Woх, Woz записываются соответственно в блоки 34, 39 памяти и затем выдаются на выходы блока 9.
Если НКН 17 выдает информацию только об углах Kс, Ψк и Qк, то для определения нуля Wоу вертикального струнного акселерометра из его показаний Qус вычитается ускорение силы тяжести g в данной точке земли, записанное в задатчике 49 и так же, как и для других струнных акселерометров, полученная разность дважды интегрируется в течение времени tт.
Если в НКН 17 вырабатывается информация не только об углах Kс, Ψк, Qк, но и о проекции Wу ускорения движения носителя на вертикальную ось стартовой системы координат, то в соответствии с номером структуры параметров, записанным в задатчике 12, сигнал с выхода дешифратора 45 замыкает ключ 46 и значение Wу, поступившее на второй вход ключа, выдается на третий вход сумматора 40. В сумматоре 40 формируется разность между Qус и Wу. Значение смещения нуля вертикального струнного акселерометра в этом случае определяется по формуле
Woy= 

 (Qус-g-Wy)dτ1dτ2.
(Qус-g-Wy)dτ1dτ2.
По сигналу с коммутатора 50 включается ключ 43 и результат тарировки Wоу записывается в блок 44 памяти, с которого затем подается на выход блока 9.
Сигналы тарировки Wоу, Wох, Woz с выходов блока 9 подаются в вычислитель 7 ИНУ 4, в котором используются для корректировки текущих показаний струнных акселерометров. При появлении на четвертом выходе блока 10 сигнала, свидетельствующего о завершении процесса выставки ГСП 5, он подается на вход пульта 18 управления, а в нем на вход ключа 104, который срабатывает и подключает табло 105 к источнику питания. При загорании табло 105 нажимается кнопка 107, в результате с пятого выхода пульта 18 управления снимается команда, разрешающая устройству 1 выработки сигналов управления прием сигналов Vс, Dс, νc, Ψс и γ с с соответствующих выходов вычислителя 7. Кроме указанных сигналов вычислитель 7 выдает в устройство 16 коррекции высоты и вертикальной скорости сигналы Hс и  .
.
Рассмотрим теперь процесс управления беспилотным летательным аппаратом (БПЛА) на различных участках траектории его полета.
Для более полного понимания сущности изобретения предположим, что полет БПЛА должен происходить по сложной траектории, состоящей из четырех участков: набора высоты, горизонтального полета, снижения, горизонтального подлета к заданной точке пространства. Как было указано выше, параметры траектории движения БПЛА с пульта 18 управления выдаются в программный блок 99 устройства 1. На первом участке траектории и значительной части второго участка траектории управление БПЛА осуществляется по сигналам с инерциального навигационного устройства. Для формирования устройством 1 используются сигналы угла курса Ψс, угла тангажа νс, угла крена γс, высоты Hс, вертикальной скорости  .
.
В начальный момент времени до набора БПЛА высоты, радиовысотомер 15 выключен, поэтому устройство 16 транслирует на седьмой и восьмой входы устройства 1 значения высоты и вертикальной скорости, вырабатываемые ИНУ 4.
Вырабатываемые инерциальным навигационным устройством 4 сигналы Ψс, νс, γс и Hс либо непосредственно, либо через коммутирующие устройства поступают соответственно в блок 91 выработки сигнала управления по курсу Ψу, блок 92 выработки сигнала управления по тангажу νу, блок 90 выработки сигнала управления по крену γ у, блок 93 выработки сигнала управления по высоте Hу. На другие входы указанных блоков с программного блока 99 поступают программные значения указанных сигналов. Выработка сигналов управления осуществляется путем решения известных математических зависимостей, а именно:
для управления продольным движением БПЛА
ρδв=(K+εp+ηp2)νc-Kνпр (1.1), где νс текущее значение угла тангажа;
νпр программное значение угла тангажа;
k, ε, η передаточные числа системы управления по каналу тангажа; для управления движением по крену
δэ=(K11+ ε11p) γc + (K12+ ε12p) Ψc-
K12 γпр (1.2); для управления движением по курсу
δп=(K21+ ε21) γc+ ( K22+ ε22) Ψc-
K22 Ψпр (1.3), где K11, ε11, K22, ε22 передаточные числа прямых связей;
K12, ε12, K21, ε21 передаточные числа перекрестных связей между каналами куpса и крена;
γс текущее значение угла крена;
Ψс текущее значение угла курса;
для управления движением по высоте
δв=q12(P)Hк+q22(P) νc-Hпр (1.4) где q21(p),q22(p) передаточные числа канала управления;
νс текущее значение угла тангажа;
Hк(Hс) текущее значение высоты;
Hпp программное значение высоты.
Техническая реализация устройств, осуществляющих выработку указанных сигналов управления и стабилизации, широко известна в технической литературе (Кузовков Н. Г. Система стабилизации летательных аппаратов (баллистических и зенитных ракет). М. Высшая школа, 1976, с. 78, рис. 4.4; Андреев В. Д. Теория инерциальной навигации. Корректируемые системы. М. Наука, 1967, с. 38-45).
Известно, что вырабатываемые инерциальными навигационными системами сигналы содержат возрастающие со временем погрешности, в наибольшей мере это относится к сигналам высоты Hс и вертикальной скорости Hс. Для уменьшения этих погрешностей и, соответственно, повышения точности управления по высоте в систему введения радиовысотомер и устройство коррекции высоты и вертикальной скорости, с помощью которых осуществляется коррекция показаний Hс и  инерциального навигационного устройства.
инерциального навигационного устройства.
Радиовысотомер 15 включается при выходе БПЛА на заданную высоту по сигналу с таймера 98 УВСУ 1. Текущее значение высоты Hрв и сигнал о достоверности измерения с РВ 15 поступают соответственно на третий и четвертый входы устройства 16 коррекции высоты и вертикальной скорости, где используются для коррекции показаний ИНУ 4. Откорректированные значения Hк и  поступают на седьмой и восьмой входы устройства 1.
поступают на седьмой и восьмой входы устройства 1.
Более подробно процесс коррекции показаний ИНУ 4 будет рассмотрен ниже.
При полете БПЛА на верхнем горизонтальном участке траектории измеренное значение дальности Dс ИНУ 4 поступает на пороговый элемент 95 УВСУ 1, где сравнивается с фиксированным заранее выбранным значением, при достижении которого ПЭ2 95 вырабатывает сигнал, который посредством устройства 96 обмена информацией транслируется на пятый вход РЛВ 3 и включает последний. Кроме того, и УВСУ 1 на шестой вход РЛВ 3 транслируется сигнал, соответствующий текущей скорости полета, который используется для компенсации допплеровского сдвига частоты. РЛВ 3 измеряет дальность до объекта и посредством собственного устройства 28 обмена информацией транслирует ее на устройство 1, где ее значение сравнивается в пороговом элементе 94 (ПЭ1) с заданным фиксированным уровнем, при достижении которого ПЭ1 94 формирует сигнал, который поступает на второй вход программного блока 99 и по которому программа полета БПЛА изменяется таким образом, что он переходит на более низкую траекторию полета на высоте Hм. При достижении БПЛА высоты Hм блок 93 устройства 1 (фиг. 9) выдает на ключ 97 соответствующий сигнал, а РЛВ 3 выдает на первый вход этого ключа сигнал управления. При наличии на входах ключа 97 обоих сигналов ключ выдает на управляющие входы переключателей 100 и 101 сигнал, по которому переключатель 100 подключает первый вход блока 91 к третьему выходу УОИ 96, а переключатель 101 подключает первый вход блока 92 к четвертому выходу УОИ 96. В результате на входы блоков 91 и 92 вместо сигналов Ψс и νс, вырабатываемых ИНУ 1, поступают сигналы ΔΨ и Δν, вырабатываемые РЛВ 3. Сигналы ΔΨ и Δν соответствуют угловому рассогласованию между направлением на объект и осью диаграммы направленности антенны РЛВ.
Таким образом, осуществляется переход управления БПЛА с инерциального навигационного устройства 4 на управление по сигналам РЛВ 3, как более точного инструмента измерения.
Для уменьшения энергетических затрат и, соответственно, увеличения дальности полета в системе используется РЛВ со сложным сигналом приведенной в описании структуры. Указанный процесс управления БПЛА по сигналам РЛВ осуществляется до конца полета.
Рассмотрим процесс коррекции выработанных ИНУ 4 высоты Hс и вертикальной скорости  по данным радиовысотомера 15, при этом отметим, что коррекция производится только при наличии сигнала достоверности измерения на втором выходе радиовысотомера 15. Процедура коррекции производится по сигналу Hрв, снимаемому с первого выхода РВ 15. Для обеспечения наибольшей точности коррекции в устройстве 16 формируются переменные во времени коэффициенты K1(t), K2(t) и K3(t). Закон изменения указанных коэффициентов получен путем решения нелинейного уравнения Риккати с учетом дисперсий начальных значений погрешностей ИНУ 4 и дисперсии случайной погрешности РВ 15 (Иванов Ю. П. и др. Комплексирование информационно-измерительных устройств летательных аппаратов. /Под ред. Б. А. Боднера. М. Машиностроение, 1984, с. 73). Ошибки ИНУ по высоте H и вертикальной скорости
по данным радиовысотомера 15, при этом отметим, что коррекция производится только при наличии сигнала достоверности измерения на втором выходе радиовысотомера 15. Процедура коррекции производится по сигналу Hрв, снимаемому с первого выхода РВ 15. Для обеспечения наибольшей точности коррекции в устройстве 16 формируются переменные во времени коэффициенты K1(t), K2(t) и K3(t). Закон изменения указанных коэффициентов получен путем решения нелинейного уравнения Риккати с учетом дисперсий начальных значений погрешностей ИНУ 4 и дисперсии случайной погрешности РВ 15 (Иванов Ю. П. и др. Комплексирование информационно-измерительных устройств летательных аппаратов. /Под ред. Б. А. Боднера. М. Машиностроение, 1984, с. 73). Ошибки ИНУ по высоте H и вертикальной скорости  могут быть аппроксимированы полиномом второй степени со случайными коэффициентами h10, h20, h30
могут быть аппроксимированы полиномом второй степени со случайными коэффициентами h10, h20, h30
ΔH=h10+h20t+h ,
, =h20+h30t.
=h20+h30t.
При выработке оценки y1(t) погрешности ИНУ по координате h10коэффициент K1(t) в начальный момент времени имеет максимальное значение K1(0)=1,0, а затем быстро убывает, обеспечивая фильтрацию флуктуационных составляющих погрешности радиовысотомера. Коэффициенты K2(t) и K3(t), используемые при выработке оценок y2(t) и y3(t) составляющих погрешность ИНУ по скорости h20 и ускорению h30 в начальный момент времени равны нулю K2(0)=0, K3(0)=0, а затем возрастают во времени до максимального значения, после чего убывают до нуля по окончании переходного процесса.
При выработке указанных коэффициентов в устройстве 16 коррекции используется кусочно-линейная аппроксимация вида
K1(t)=a1k+b1k ˙Δ t1k
K2(t)=a2N+b2N ˙Δ t2N,
K3(t)=a3F+b3F ˙Δ t3F, где K,N,F число участков аппроксимации каждого коэффициента;
a1k, a2N, a3F, b1k, b2N, b3F постоянные величины.
Рассмотрим работу устройства 16 коррекции. Сигналы Hс и  с ИНУ 4 поступают на первый и второй входы устройства 16 коррекции, а на третий и четвертый входы его поступают сигналы Hрв и достоверности информации с РВ 15 (фиг. 8).
с ИНУ 4 поступают на первый и второй входы устройства 16 коррекции, а на третий и четвертый входы его поступают сигналы Hрв и достоверности информации с РВ 15 (фиг. 8).
В блоке 73 сигнал Hрв вычитается из сигнала Hс и при наличии на втором входе ключа 75 сигнала достоверности разностный сигнал ΔH=Hс-Hрвчерез открытый ключ 38 поступает на первый вход блока 76 разности. Одновременно сигналом достоверности запускается таймер 88, сигналы с которого поступают на блок 87 пороговых элементов. В начальный момент времени коррекции (Δt11= Δt21= Δt3=0) блок 87 по сигналу с таймера 88 подключает к первому и второму входам блока 86 ключей первый и второй выходы блока 89 памяти, с которых снимаются значения коэффициентов a11, a21, a31 и b11, b21, b31. В начальный момент значения коэффициентов соответственно равны: a11=1,0; a21=a31=0. Указанные сигналы с выходов блока 86 ключей поступают соответственно на входы блоков 85, 84. На выходе блока 84 формируется начальное значение коэффициента K1= a11, а значения коэффициентов K2 и K3 при этом равны 0. В блоке 77 осуществляется умножение разностного сигнала ΔH=Hс-Hрв на коэффициент K1. В результате на первом выходе блока 77 формируется сигнал, пропорциональный
y1(t)=K1(Hс-Hрв)/t
На втором и третьем выходах блока 77 в начальный момент сигналы отсутствуют.
Выходной сигнал с блока 77 (с его первого выхода) поступает на сумматор 79, а с него на инвертор 78, на выходе которого формируется сигнал, пропорциональный значению y1=K1(Hс-Hрв), который поступает на входы блоков 76, 74. В блоке 74 из сигнала Hс вычитается сигнал y=K1(Hc-Hрв), а так как в начальный момент K1=1,0, то с выхода блока 74 снимается сигнал, пропорциональный разности Hк= Hс-(Hс-Hрв), т. е. в начальный момент коррекция сводится к замещению сигнала Hс сигналом Hрв, как более точным. Этот сигнал и поступает на соответствующий вход устройства 1, а конкретнее на вход блока 93 (фиг. 9), вырабатывающего сигнал управления по высоте.
В следующий момент времени на выходах блока 84 формируются сигналы, пропорциональные значениям коэффициентов
K1(t)=a11+b11˙Δ t,
K2(t)=a21+b21˙Δ t,
K3(t)=a31+b31˙Δ t,
поступающие на входы блока 77 умножителей.
В результате на первом выходе блока 77 формируется сигнал, пропорциональный произведению выходного сигнала ε с блока 76 разности на коэффициент K1, т. е. сигнал, пропорциональный произведению [K1(t) ˙ε] На втором выходе блока 77 формируется сигнал, пропорциональный произведению [K2(t) ˙ε] а на его третьем выходе сигнал, пропорциональный значению [K3(t) ˙ε] Сигнал [K3(t) ˙ε] после интегрирования в интеграторе 83 становится пропорциональным оценке y3ошибки ИНУ по ускорению, а на выходе сумматора 82 формируется сигнал  = K2ε+y3, который после интегрирования в интеграторе 80 становится пропорциональным оценке y2=y20+y3(t) ошибки ИНУ по скорости. Сигнал с выхода интегратора 80 поступает на вторые входы сумматора 79 и блока 81 разности. Выходной сигнал с сумматора 79 после интегрирования в интеграторе 78 становится пропорциональным оценке ошибки по координате, равной
= K2ε+y3, который после интегрирования в интеграторе 80 становится пропорциональным оценке y2=y20+y3(t) ошибки ИНУ по скорости. Сигнал с выхода интегратора 80 поступает на вторые входы сумматора 79 и блока 81 разности. Выходной сигнал с сумматора 79 после интегрирования в интеграторе 78 становится пропорциональным оценке ошибки по координате, равной
y1(t)=y10+y2(t)+y .
.
Сигнал y2, поступающий на второй вход блока 81, вычитается из сигнала вертикальной скорости  , поступающего на второй вход устройства 16. В результате с выхода блока 81 снимается сигнал, пропорциональный
, поступающего на второй вход устройства 16. В результате с выхода блока 81 снимается сигнал, пропорциональный  =
= -y2.
-y2.
Сигнал y1 поступает на второй вход блока 74, где он вычитается из сигнала Hс, в результате на выходе блока 74 сформируется сигнал, пропорциональный разности Hк=Hс-y1. Таким образом, для выработки сигнала управления высотой полета БПЛА используются откорректированные сигналы  и Hк.
и Hк.
Благодаря введению в систему новых блоков и устройств, их связям между собой и известными устройствами система вырабатывает более точные команды управления полетом БПЛА.
Приведенные чертежи и блок-схемы алгоритмов позволяют, пользуясь современной элементной базой и технологией, без особых затруднений изготовить предлагаемую систему в производстве, что характеризует ее как промышленно применимую.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 1993 |
|
RU2062990C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ПОДВОДНОГО АППАРАТА | 1997 |
|
RU2123665C1 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056643C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ СУХОПУТНЫХ НОСИТЕЛЕЙ В РЕЖИМЕ КРАТКОВРЕМЕННЫХ ОСТАНОВОК | 1993 |
|
RU2056641C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056642C1 |

Изобретение относится к комплексным системам управления, включающим как энерциальные навигационные устройства, так и радиотехнические устройства, вырабатывающие команды управления беспилотными летательными аппаратами (БПЛА). Цель изобретения повышение точности. Система содержит энерциальное навигационное устройство, включающее гидростабилизированную платформу (ГСП) с установленными на ней маятниковыми и струнными акселерометрами, блок выработки сигналов выставки ГСП, блок тарировки акселерометров, задатчик состава параметров навигационного комплекса носителя, задатчик положения точки подвеса платформы, задатчик паспортных данных инерциальных блоков, блок коррекции паспортных данных, радиовысотомер, устройство коррекции высоты и вертикальной скорости, радиолокационный визир и устройство выработки сигналов управления, подключенное к исполнительному устройству, причем перед началом полета система подключена к пункту управления, установленному на носителе БПЛА, при этом в пункт управления входят навигационный комплекс носителя, таймер и пульт управления. Система обеспечивает выставку гироплатформы инерциального навигационного устройства, тарировку акселерометров, начальное управление БПЛА по сигналам с инерциального навигационного устройства с последующим переходом на управление от радиотехнических средств, как более точного инструмента управления. 4 з. п. ф-лы, 9 ил.
| Справочник по радиоэлектронике | |||
| Под | |||
| ред | |||
| А.А | |||
| Куликовского, т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
