Изобретение относится к области авиационных систем, в частности к беспилотным летательным аппаратам для проведения оперативного мониторинга обслуживания транспортной инфраструктуры, охраны объектов, мониторинга территорий, нужд силовых ведомств, поиска людей.
Известно гиростабилизированное оптико-электронное устройство для поисково-спасательных операций с применением вертолета, состоящее из жестко закрепленных на гиростабилизированной платформе объектива, выход которого соединен с блоком распределения светового потока, разделяющего световой поток в три канала: в инфракрасный канал, в видимый канал и в ультрафиолетовый канал, с каждым из которых связан выход блока распределения светового потока, выходы которого соединены с входами блока приема изображений, выход которого соединен с блоком энергонезависимой памяти и с входом пульта оператора с видеопросмотровым устройством, а также биорадиолокатора, выход которого соединен с блоком энергонезависимой памяти и с входом пульта оператора с видеопросмотровым устройством. (Патент РФ №188984, опубл. 06.05.2019).
Известна система управления беспилотным летательным аппаратом с комплексным навигационным устройством, которая содержит инерциальное навигационное устройство, включающее гиростабилизированную платформу (ГСП) с установленными на ней маятниковыми и струнными акселерометрами, блок выработки сигналов выставки ГСП, блок тарировки акселерометров, задатчик состава параметров навигационного комплекса носителя, задатчик положения точки подвеса платформы, задатчик паспортных данных инерциальных блоков, блок коррекции паспортных данных, радиовысотомер, устройство коррекции высоты и вертикальной скорости, радиолокационный визир и устройство выработки сигналов управления, подключенное к исполнительному устройству, причем перед началом полета система подключена к пункту управления, установленному на носителе БПЛА, при этом в пункт управления входят навигационный комплекс носителя, таймер и пульт управления. (Патент РФ №2046736).
Известен трехосный гиростабилизатор, содержащий внешнее кардановое кольцо, одна или две цапфы которого образуют азимутальную ось подвеса, промежуточное кардановое кольцо своими цапфами, образующими промежуточную ось подвеса, установленное в подшипниках внешнего карданового кольца, гиростабилизированную платформу с установленными на ней инерциальными чувствительными элементами, своими цапфами, образующими внутреннюю ось подвеса, установленную в подшипниках промежуточного карданового кольца, причем азимутальная и промежуточная, промежуточная и внутренняя оси конструктивно перпендикулярны, при этом функцию внешнего карданового кольца выполняет корпус прибора, причем одна или две цапфы которого, расположенные вне его по его вертикальной симметрии, установлены в одном или двух подшипниках объекта-носителя или амортизатора, а оси подшипников совпадают с вертикальной осью объекта-носителя или амортизатора. (Патент РФ №2157966, опубл. 20.10.2000).
Известна комплексная гиростабилизированная система наблюдения, содержащая оптико-электронный блок, имеющий неподвижное основание для закрепления на подвижном носителе и подвижную часть, при этом подвижная часть выполнена в виде гиростабилизированной платформы, на которой размещены лазерный дальномер, дневная телевизионная камера с вариообъективом, активно-импульсная телевизионная камера на основе фотоприемного модуля и/или тепловизор с вариообъективом, на неподвижном основании оптико-электронного блока установлена комплексированная инерциально-спутниковая навигационная система, а само это основание снабжено разъемами для волоконно-оптического кабеля. Дополнительно введены размещенный в отдельном корпусе блок обработки информации, подключенный к разъему неподвижного основания волоконно-оптическим кабелем для оптической развязки, обеспечивающей съем сигнала при вращении подвижной части по двум осям, а также пульт управления и многофункциональный индикатор, соединенные с блоком обработки информации электрическими кабелями. Блок обработки информации выполнен модульным, в состав которого входят модуль питания, модуль интерфейсный, модуль видеопроцессора, модуль регистрации, модуль преобразования интерфейса и модуль вывода видеосигнала. Пульт управления снабжен рукояткой управления. (Патент РФ №155170, опубл.27.09.2015)
Известна гироскопическая навигационная система, включающая гироплатформу, помещенную во внешний двухосный карданов подвес, установленный на жестком основании, причем ось X платформы совпадает с осью подшипников внешней вертикальной рамки карданова подвеса, ось Z платформы перпендикулярна плоскости платформы, ось Y платформы лежит в плоскости платформы и перпендикулярна осям X и Z, на платформе установлены трехстепенный гироскоп с двумя датчиками угла и двумя датчиками момента и акселерометр, причем вектор кинетического момента гироскопа параллелен оси Y платформы, взаимно ортогональные оси датчиков момента и взаимно ортогональные оси датчиков угла гироскопа параллельны осям X и Z платформы, а ось чувствительности акселерометра параллельна оси Y платформы, на цапфе платформы установлен двигатель стабилизации вокруг оси X платформы, на цапфе наружной вертикальной рамки установлены двигатель стабилизации вокруг оси Z платформы и датчик угла, в которую дополнительно введены гироплатформа, помещенная во внешний трехосный карданов подвес, установленный на том же основании, и блок управления и выработки навигационных параметров, причем оси Y этой платформы совпадает с осью подшипников промежуточной горизонтальной рамки кардана подвеса, ось Z платформы перпендикулярна плоскости платформы, а ось X лежит в плоскости платформы и перпендикулярна осям Y и Z, на платформе установлены трехстепенный гироскоп с двумя датчиками угла и двумя датчиками момента и два акселерометра, причем вектор кинетического момента гироскопа параллелен оси Z платформы, взаимно ортогональные оси датчиков момента и взаимно ортогональные оси датчиков угла гироскопа и оси чувствительности акселерометров параллельны осям X и Y платформы, на цапфах платформы установлены двигатель стабилизации вокруг оси Y платформы и датчик угла, на цапфах промежуточного горизонтального карданова кольца установлены двигатель стабилизации вокруг оси X платформы и датчик угла, на цапфе внешней вертикальной рамки карданова подвеса установлены двигатель стабилизации вокруг оси Z платформы и датчик угла, причем выходы четырех датчиков угла гироскопов, трех акселерометров и четырех датчиков угла, установленных по осям кардановых подвесов, соединены с одиннадцатью входами блока управления и выработки навигационных параметров, девять выходов которого соединены с входами четырех датчиков момента гироскопов и пяти двигателей стабилизации, установленных по осям кардановых подвесов. (Патент РФ №2169903, опубл. 27.06.2001)
Известна инерциальная система, содержащая гироплатформу с тремя акселерометрами и гироскопами, устройства преобразования аналоговых сигналов, устройство обработки цифровых сигналов (УОЦС), следящие системы положения по трем осям координат, синусно-косинусные вращающиеся трансформаторы (СКВТ), устройства стабилизации гироплатформы по трем осям. В УЦОС выполнены канал обработки сигнала акселерометра по оси крена в составе шести регистров хранения, трех логических устройств НЕ, устройства умножения, десяти сумматоров, четырех суммирующих счетчиков, канал обработки сигнала акселерометра по оси тангажа в составе двух регистров хранения, двух логических устройств НЕ, устройства умножения, восьми сумматоров, двух суммирующих счетчиков, устройства обработки сигналов СКВТ по оси курса в составе двух регистров хранения, двух логических устройств НЕ, двух устройств умножения, шести сумматоров, двух суммирующих счетчиков. (Патент №2326249, опубл. 10.06.2008)
За прототип выбрана инерциальная платформа, которая содержит основание с тремя акселерометрами и двумя гироскопами в раме курса, установленной в карданный подвес, тангажа и внешнего крена, следящие системы стабилизации каждой из рам, причем рама внешнего крена установлена на амортизаторах. Амортизаторы выполнены с имеющими кольцевую форму внутренней и внешней обоймами и диафрагмой, имеющей V-образный профиль. Рама внешнего крена установлена на двух амортизаторах на ее противоположных сторонах. На раме внутреннего крена в первой плоскости установлены два первых груза, на раме тангажа в первой плоскости установлены два вторых груза. На раме внутреннего крена на второй плоскости, перпендикулярной первой плоскости, расположен третий груз. На перпендикулярной первой плоскости второй плоскости на раме тангажа установлены два четвертых груза. На внутренней обойме одного из амортизаторов установлены два пятых груза, на внутренней обойме обоих амортизаторов расположены два шестых груза. (Патент РФ №2329467, опубл. 20.07.2008).
К общим недостаткам известных технических решений можно отнести:
- нестабильность работы на подвижных, меняющих свой геометрический вид объектах (меняющий траекторию движения автомобиль, человек и т.д.);
- невозможность удержания захвата объекта при меняющемся освещении (например, выход объекта из тени или наоборот, попадание его в зону тени вызовет сильное отклонение фактического изображения объекта от «эталонного»);
- отсутствие возможности качественно спрогнозировать дальнейшее перемещение объекта, так как алгоритмам пиксельного сравнения для корректной работы необходимо плавное движение объекта интереса, не предполагающее его кардинального изменения скорости и направления.
- в алгоритмах, основанных на сравнении простых геометрических фигур форма объекта задается фигурой (обычно прямоугольником), и при работе алгоритма распознавания образов на каждом последующем кадре происходит поиск «эталонного» сохраненного ранее образа. Подобные алгоритмы хорошо работают в охранных системах слежения, в которых видеокамеры стоят статично и обозревают один и тот же участок местности, производя слежение за выделенным объектом, сравнивая его с фоном. Однако качество слежения существенно падает, если объект меняет свою форму. Также, эти алгоритмы неприменимы в БПЛА, так как камеры на них обозревают пространство в движении.
Задача - создание гиростабилизирующей системы с высокой надежностью удержания цели в плоскости изображения по сравнению с беспилотными аппаратами, в которых полезная нагрузка управляется оператором вручную.
Технический результат - возможность управления положением видеокамеры для стабилизации видеоизображения и слежения за целью.
Технический результат достигается гиростабилизированной системой стабилизации полезной нагрузки беспилотного воздушного средства, состоящей из трехстепенного гироскопа, датчиков момента угла, рам тангажа и крена, следящей системы стабилизации, виброгасительных элементов, при этом система стабилизации выполнена в виде крепежной площадки, к которой болтовым соединением крепится нижняя опора демпфера, при этом между нижней и верхней опор демпфера расположены виброгасительные элементы, выполненные в виде двенадцати круглых резиновых демпферов, опоры демпфера выполнены из углепластика, рама тангажа представляет собой ферму тангажа, выполненную в виде платформы, на которой посредством болтового соединения закреплен табурет с установленным внутри электромотором крена, датчик угла крена и крышка датчика угла крена расположены на верхней части табурета с электромотором крена, ферма панорамирования выполнена в виде основания, которое имеет болтовое соединение с электромотором панорамирования, на основании фермы панорамирования установлен датчик угла тангажа, напротив которого установлен табурет с установленным внутри электромотором тангажа, крышка которого установлена в верхней части табурета с электромотором тангажа, крышка датчика угла тангажа установлена на основании посредством болтового соединения, электромотор крена соединен болтовым соединением с консолью крена, на которой закреплены видеокамера, плата управления видеокамерой и трехстепенный гироскоп, установленный под видеокамерой, при этом видеокамера и плата управления видеокамерой соединены между собой проводами, подшипник крена установлен между консолью крена и платформой тангажа, электромотор панорамирования имеет болтовое соединение с верхней опорой демпфера и соединен посредством проводов с датчиком угла панорамирования, при этом крышка датчика угла панорамирования расположена на верхней опоре демпфера и является общей сконтроллером, который установлен на верхней опоре демпфера и имеет возможность подключения к автопилоту беспилотного воздушного средства, провода от электромотора крена, датчика угла крена, платы управления видеокамерой и трехстепенного гироскопа проходят через полый вал электромотора тангажа, где к ним присоединены провода от мотора тангажа, и которые все вместе на выходе подключены к подвижной стороне контактного кольца скольжения, к которой также подключены провода датчика угла тангажа, и которые все вместе от неподвижной стороны контактного кольца скольжения проведены через полый вал электромотора панорамирования, где к ним присоединены провода мотора панорамирования и датчика угла панорамирования, на выходе провода от платы управления видеокамерой имеют подключение к автопилоту беспилотного воздушного средства, остальные провода имеют соединение с контроллером.
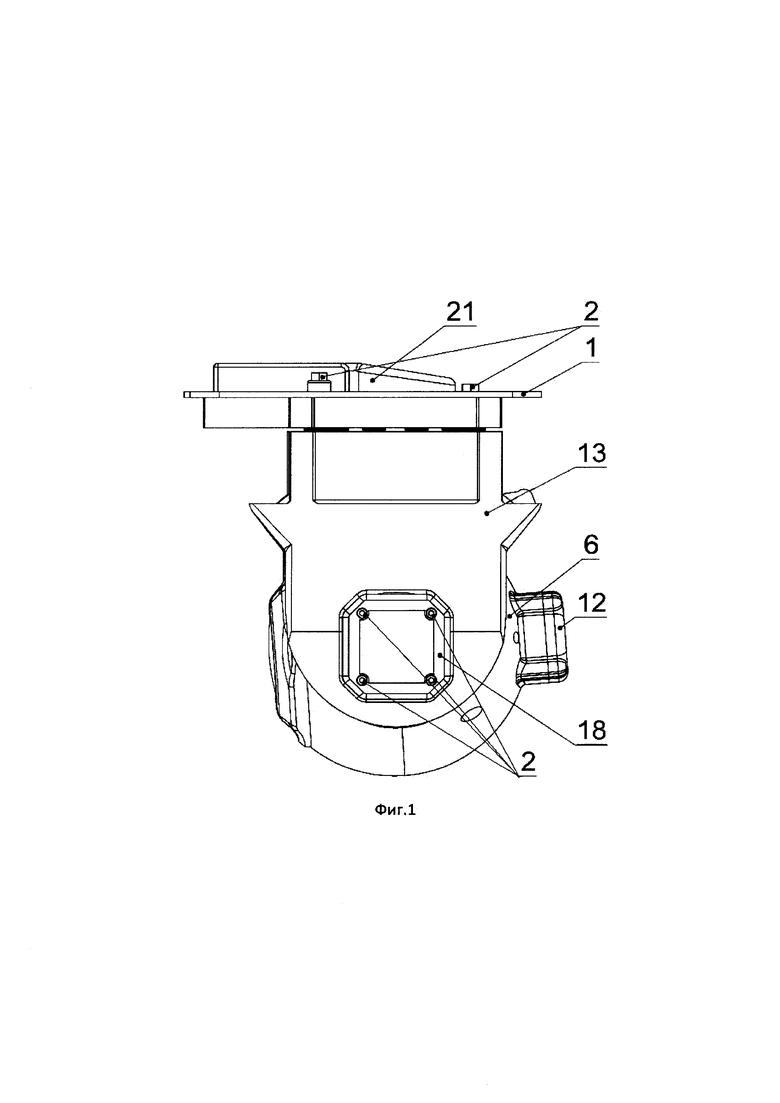
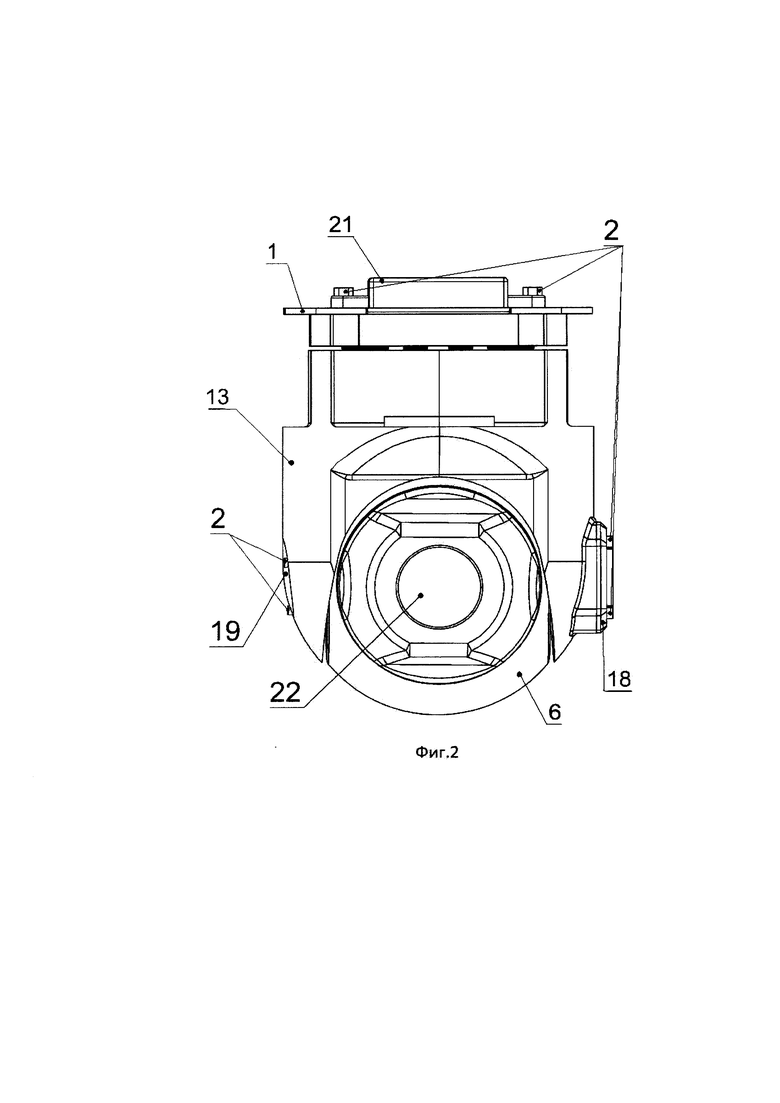
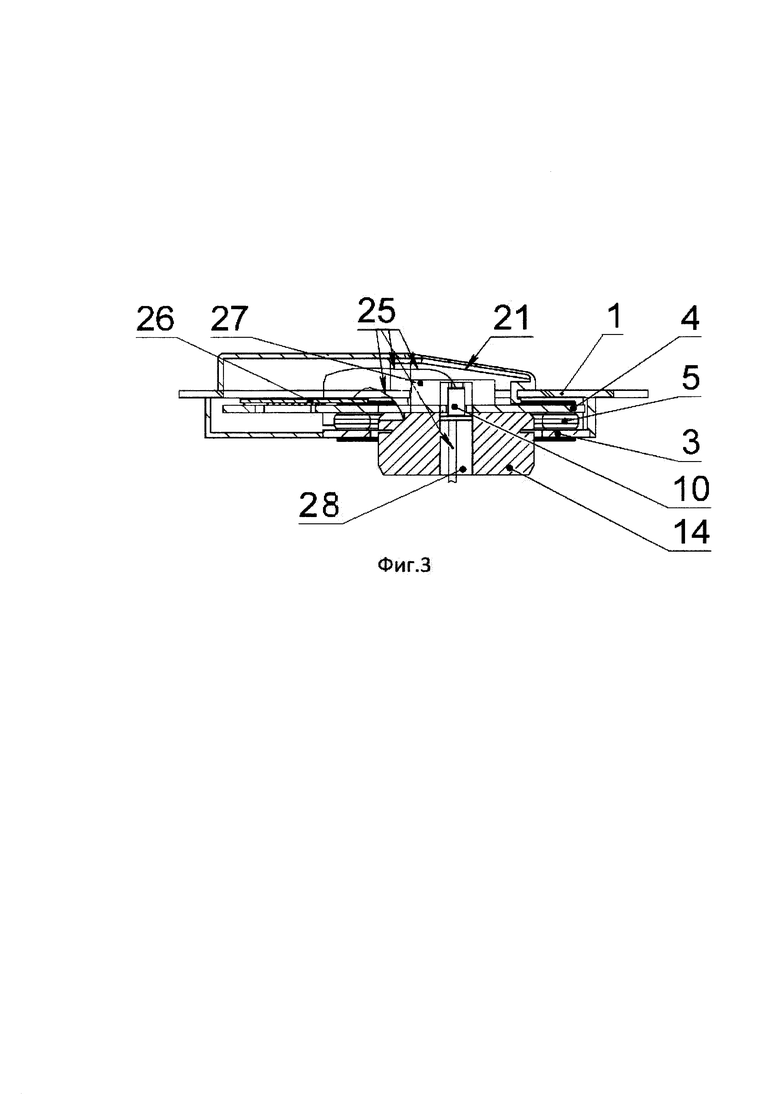
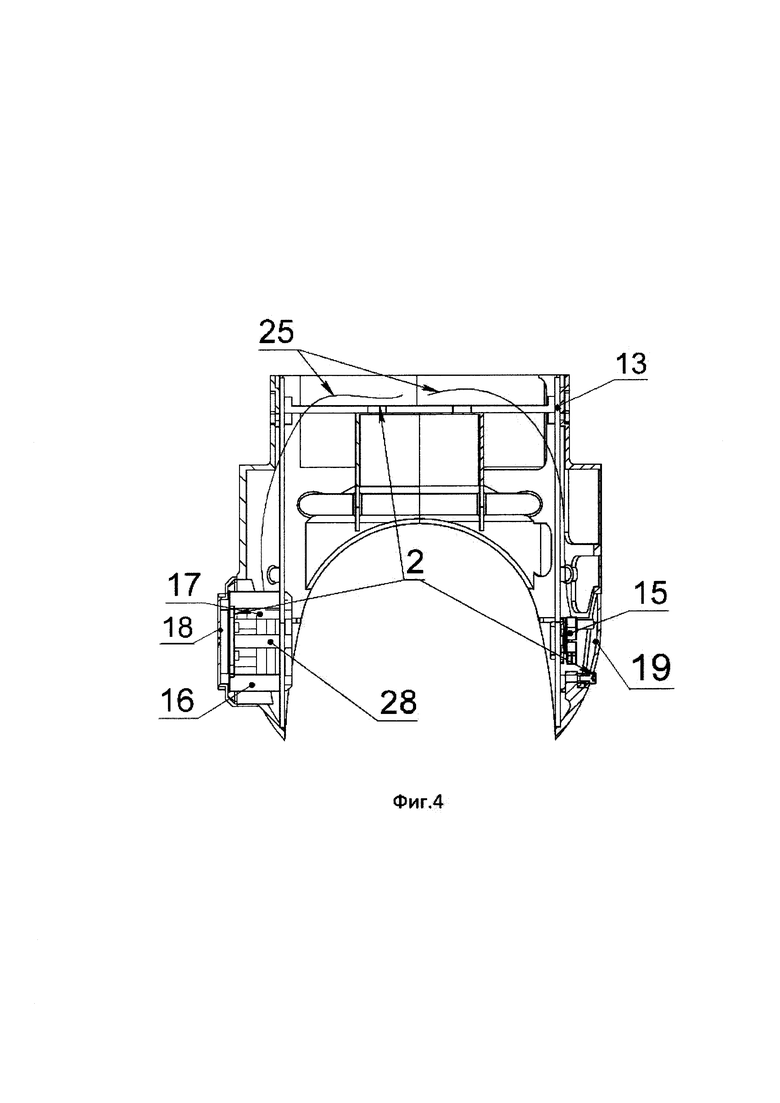
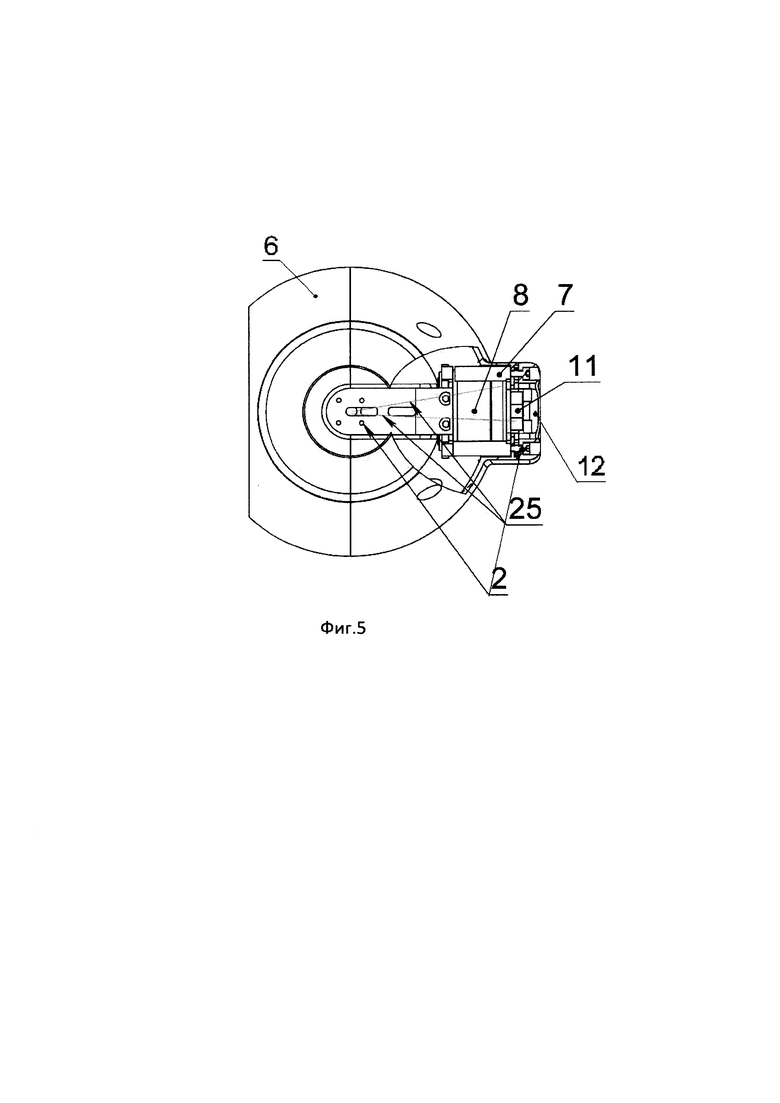
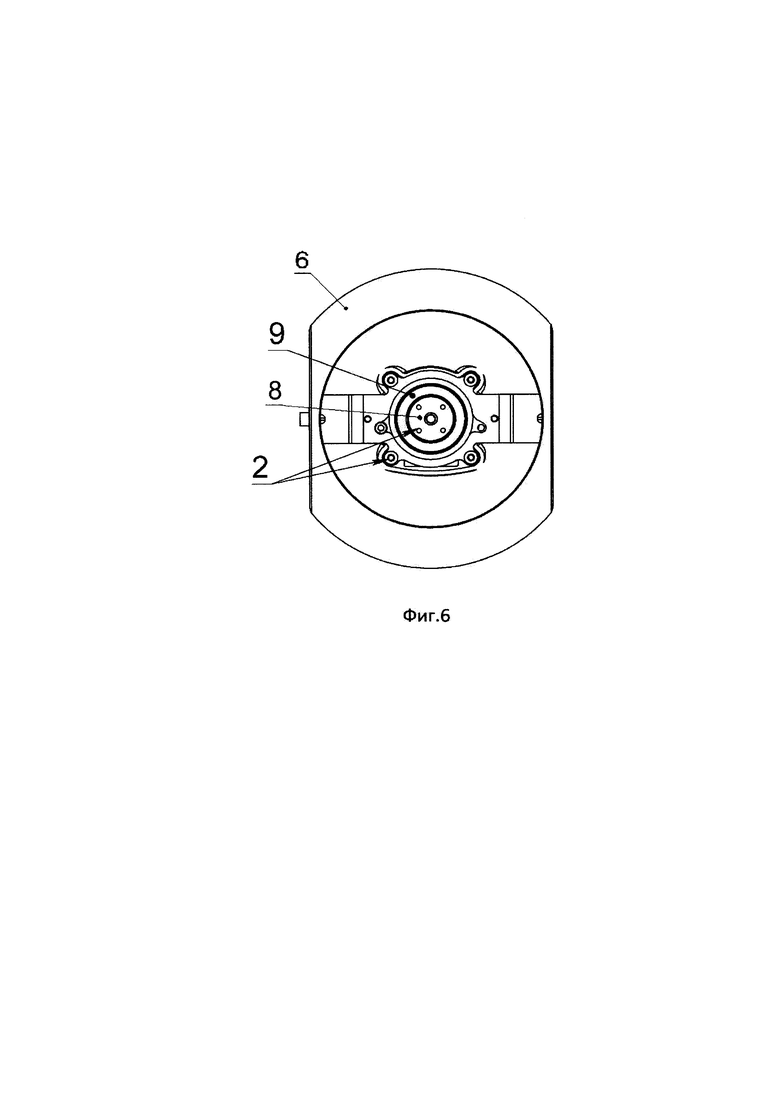
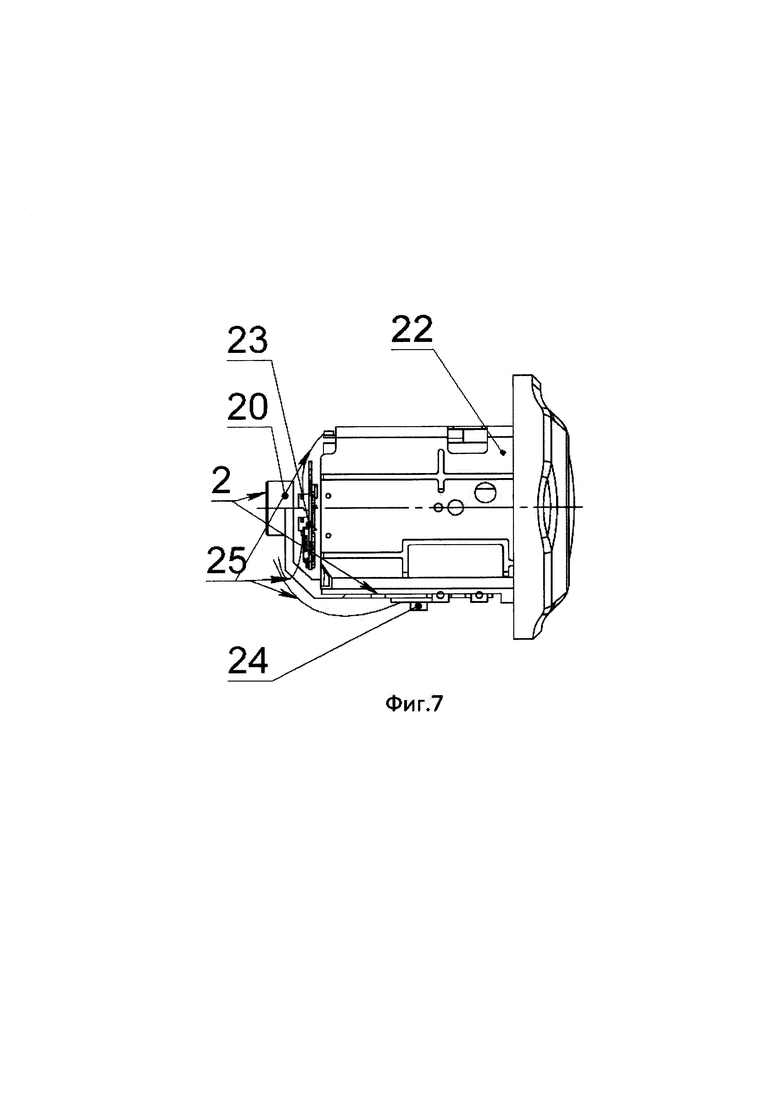
Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного средства поясняется чертежами, где на фиг. 1 показан общий вид с боку, на фиг. 2 - общий вид спереди, на фиг. 3 - крепление опор демпфирования, на фиг. 4 - ферма панорамирования, на фиг. 5 - ферма тангажа вид с боку, на фиг. 6 - ферма тангажа вид спереди, на фиг. 7 - блок с камерой.
Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного средства состоит из крепежной площадки 1, к которой болтовым соединением 2 крепится нижняя опора демпфера 3, между нижней 3 и верхней опор демпфера 4 расположены круглые резиновые демпфера 5, опоры демпфера выполнены из углепластика.
Ферма тангажа выполнена в виде платформы 6, на которой посредством болтового соединения 2 закреплен табурет 7, внутри которого установлен электромотор крена 8. Датчик угла крена 11 и крышка 12 датчика угла крена расположены на верхней части табурета 7.
Ферма панорамирования выполнена в виде основания 13, которое имеет болтовое соединение 2 с электромотором панорамирования 14. Датчик угла тангажа 15 и табурет 16 с электромотором тангажа 17 установлены друг против друга на основании фермы панорамирования 13. Электромотор тангажа 17 установлен внутри табурета 16, крышка 18 мотора тангажа 17 установлена в верхней части табурета 16. Крышка 19 датчика угла тангажа 15 установлена на основании 13 посредством болтового соединения 2.
Электромотор крена 8 соединен болтовым соединением 2 с консолью крена 20, на которой закреплены видеокамера 22, плата управления 23 видеокамерой 22 и трехстепенный гироскоп 24, установленный под видеокамерой 22. Видеокамера 22 и плата управления 23 видеокамерой 22 соединены между собой проводами 25, подшипник крена 9 установлен между консолью крена 20 и платформой тангажа 6.
Электромотор панорамирования 14 имеет болтовое соединение 2 с верхней опорой демпфера 4 и соединен посредством проводов 25 с датчиком угла панорамирования 27. Крышка 21 датчика угла панорамирования 27 расположена на верхней опоре демпфера 4 и является общей с контроллером 26.
Контроллер 26 гиростабилизирующей платформы установлена на верхней опоре демпфера 4 и имеет возможность подключения к автопилоту беспилотного воздушного судна.
Провода от электромотора крена 8, датчика угла крена 11, платы управления видеокамерой 23 и трехстепенного гироскопа 24 проходят через полый вал 28 электромотора тангажа 17, где к ним присоединяются провода от мотора тангажа, и которые все вместе на выходе подключены к подвижной стороне контактного кольца скольжения 10, к которой также подключены провода датчика угла тангажа 15, и которые все вместе от неподвижной стороны контактного кольца скольжения 10 проведены через полый вал электромотора панорамирования 14, где к ним присоединены провода мотора панорамирования 14 и датчика угла панорамирования 27. На выходе провода от платы управления видеокамерой имеют подключение к автопилоту беспилотного воздушного судна, остальные провода имеют соединение с контроллером 26.
Еще одно важное требование к гиростабилизированной платформе - это возможность бесконечного вращения по оси панорамирования. Эта функция необходима для непрерывного удержания цели во всей нижней полусфере беспилотного летательного аппарата. Это достигается через использование в конструкции контактного кольца скольжения.
Наличие трех осей (панорамирования, тангажа и крена) для наведения камеры на точку интереса обеспечивает получение стабильного горизонтального положения видеокамеры не зависимо от положения беспилотного воздушного судна по оси крена.
Одним из основных компонентов гиростабилизированной системы является видеокамера, которая могла бы выделить цифровую стабилизацию изображения и дополнительно улучшить плавность получаемого видео, функцию «антитуман» (повышение контрастности в условиях ограниченной видимости, высокую светочувствительность, а также функцию компенсации источника заднего света, которая удаляет солнечные блики с отражений в поле зрения камеры.
Контроллер гиростабилизирующей платформы предназначен для создания высококачественных систем стабилизации видеокамеры и позволяет подключать датчики угла для улучшения качества стабилизации. Также, плата управления гиростабилизирующей платформы имеет возможность подключения к автопилоту, что позволяет реализовывать требуемые функции, такие как направление камеры в точку по координатам и слежение за подвижной точкой.
Возможность обеспечения стабильного удержания выбранного объекта в кадре в изменяющихся условиях освещенности, расстояния и угла съемки обеспечивается возможностью бесконечного вращения контактного кольца. Эта функция необходима для непрерывного удержания цели во всей нижней полусфере беспилотного летательного аппарата.
Для работы гиростабилизированной платформы необходимы электромоторы. При выборе электромоторов к рассмотрению принимались только моторы с полым валом, для проведения внутри мотора проводов. Конструкция электромотора должна позволять пропустить через его полый вал провода, или закрепить на нем контактное кольцо. Так же электромоторы должны быть компактны и легки.
Заявляемое расположение электромоторов обладает рядом преимуществ для использования в беспилотных летательных аппаратах. Оно обеспечивает наибольшую компактность расположения элементов внутри системы и допускает использование только одного контактного кольца по оси мотора панорамирования для получения бесконечного вращения по этой оси без существенного ограничения допустимых углов наклона камеры по всем трем осям. По оси тангажа можно направлять камеру не только вниз и по горизонту, а также и наверх, что позволит следить не только за подстилающей поверхностью, но также и в ограниченном диапазоне обозревать небо, прфиги необходимости поиска объектов, летящих выше.
Для плавной и точной работы гиростабилизированной системы применяются датчики угла.
Из-за конструкции консоли, предназначенной для установки камер, электромотор крена получает чрезмерную нагрузку. И чтобы не нагружать электромотор крена предусмотрен подшипник внутреннего крена, который берет часть нагрузки на себя и обеспечит стабильную работу данного электромотора.
Для гиростабилизированной системы стабилизации видеокамеры БПЛА крайне важны малый вес и прочность конструкции. Это объясняет выполнение опор демпфера из углепластика.
Углепластик - полимерные композитные материалы из переплетенных нитей углеродного волокна. Материалы отличаются высокой прочностью, жесткостью и малой массой, часто прочнее стали, но гораздо легче.
В практике, для ограничения растяжения демпферов и их защиты от выпадения используются специальные «якоря», но они не гарантируют полностью не выпадения демпферов. В нашем случае, максимально компактная компоновка всей системы стабилизации позволяет отказаться от фиксации демпферов при помощи «якорей», так как растяжение демпферов ограничивается крепежной площадкой.
Установление контроллера гиростабилизированной системы на верхней опоре демпфера позволяет значительно уменьшить габариты ГСП и улучшить качество работы всей системы, так как на плату управления не воздействуют вибрации исходящие от носителя.
Пример конкретного выполнения.
В 2020 году опытный образец гиростабилизированной системы стабилизации полезной нагрузки беспилотного воздушного судна был успешно испытан на БПЛА Альбатрос-М5.
По данным характеристикам наиболее оптимальным выбором стала видеокамера Sony FCB7500EV, обладающая FULL-HD матрицей и оптикой с переменным оптическим увеличением 1-30х. Также, среди достоинств камеры, можно выделить цифровую стабилизацию изображения, которая дополнительно улучшает плавность получаемого видео, функцию «антитуман» (повышение контрастности в условиях ограниченной видимости, высокую светочувствительность, а также функцию компенсации источника заднего света, которая удаляет солнечные блики с отражений в поле зрения камеры.
В качестве электромоторов тангажа, панорамирования и крена были использованы GB54-2 фирмы T-Motor. Конструкция мотора позволяет пропустить через его полый вал провода, или закрепить на нем контактное кольцо. Исходя из конструкции мотора GB54-2 было выбрано контактное кольцо скольжения производителя «Senring» модели М125.
В качестве контроллера для управления и стабилизации гиростабилизированной системы был выбран контроллер фирмы «BaseCam», модели «SimpleBGC» 32-bit Extended. Контроллер предназначен для создания высококачественных систем стабилизации фото- и видеокамер и позволяет подключать дополнительное оборудование (датчики угла) для улучшения качества стабилизации. Также, контроллер имеет возможность подключения к автопилоту по интерфейсу UART, что позволяет реализовывать требуемые функции, такие как направление камеры в точку по координатам и слежение за подвижной точкой.
Гиростабилизированная система стабилизации полезной нагрузки устанавливалась на беспилотное воздушное судно.
Объект интереса фиксировался посредством видеокамеры, через провода которой информация по объекту интереса передавалась на плату управления видеокамерой. Далее от платы управления видеокамерой по проводам информация поступала через полый вал электромотора тангажа к контактному кольцу, затем через полый вал мотора панорамирования по проводам платы управления видеокамерой информация поступала к автопилоту беспилотного воздушного судна, а по остальным проводам (провода от электромотора крена, датчика угла крена, трехстепенного гироскопа, мотора тангажа, датчика угла тангажа, мотора панорамирования, и датчика угла панорамирования) информация поступала на платформу управления ГСП, откуда передавалась также на автопилот.
Оператор на земле получал изображение от видеокамеры и передавал команды на БВС. Данные с БВС поступали в автопилот, откуда на плату управления ГСП, которая согласно полученной информации и информации, полученной от всех датчиков углов и трехстепенного гироскопа, передавала команды по изменению положения углов ГСП для ведения траектории объекта интереса.
Таким образом, заявленная гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна обеспечивает возможность управления положением видеокамеры для стабилизации видеоизображения и слежения за целью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ НАПРАВЛЕНИЯ ЗЕРКАЛА АНТЕННОГО УСТРОЙСТВА НА ОБЪЕКТ ВИЗИРОВАНИЯ С ОДНОВРЕМЕННЫМ ФОРМИРОВАНИЕМ СИГНАЛОВ ТОРМОЖЕНИЯ ВРАЩЕНИЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ ПРИ КРУГОВОМ ВРАЩЕНИИ ОСНОВАНИЯ АНТЕННОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО ЖЕСТКО ВНУТРИ КОРПУСА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2336611C1 |
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ ОПТИЧЕСКИХ КАНАЛОВ | 2024 |
|
RU2831620C1 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
Изобретение относится к области авиационных систем, в частности к беспилотным летательным аппаратам для проведения оперативного мониторинга обслуживания транспортной инфраструктуры, охраны объектов, мониторинга территорий, нужд силовых ведомств, поиска людей. Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного средства состоит из трехстепенного гироскопа, датчиков момента угла, рам тангажа и крена, следящей системы стабилизации и виброгасительных элементов. При этом система стабилизации выполнена в виде крепежной площадки, к которой болтовым соединением крепится нижняя опора демпфера, при этом между нижней и верхней опорами демпфера расположены виброгасительные элементы, выполненные в виде двенадцати круглых резиновых демпферов, опоры демпфера выполнены из углепластика, рама тангажа представляет собой ферму тангажа, выполненную в виде платформы, на которой посредством болтового соединения закреплен табурет с установленным внутри электромотором крена. Датчик угла крена и крышка датчика угла крена расположены на верхней части табурета с электромотором крена, ферма панорамирования выполнена в виде основания, которое имеет болтовое соединение с электромотором панорамирования, на основании фермы панорамирования установлен датчик угла тангажа, напротив которого установлен табурет с установленным внутри электромотором тангажа, крышка которого установлена в верхней части табурета с электромотором тангажа. Крышка датчика угла тангажа установлена на основании посредством болтового соединения, электромотор крена соединен болтовым соединением с консолью крена, на которой закреплены видеокамера, плата управления видеокамерой и трехстепенный гироскоп, установленный под видеокамерой. При этом крышка датчика угла панорамирования расположена на верхней опоре демпфера и является общей с контроллером, который установлен на верхней опоре демпфера и имеет возможность подключения к автопилоту беспилотного воздушного средства. Технический результат – обеспечение возможности управления положением видеокамеры для стабилизации видеоизображения и слежения за целью. 7 ил.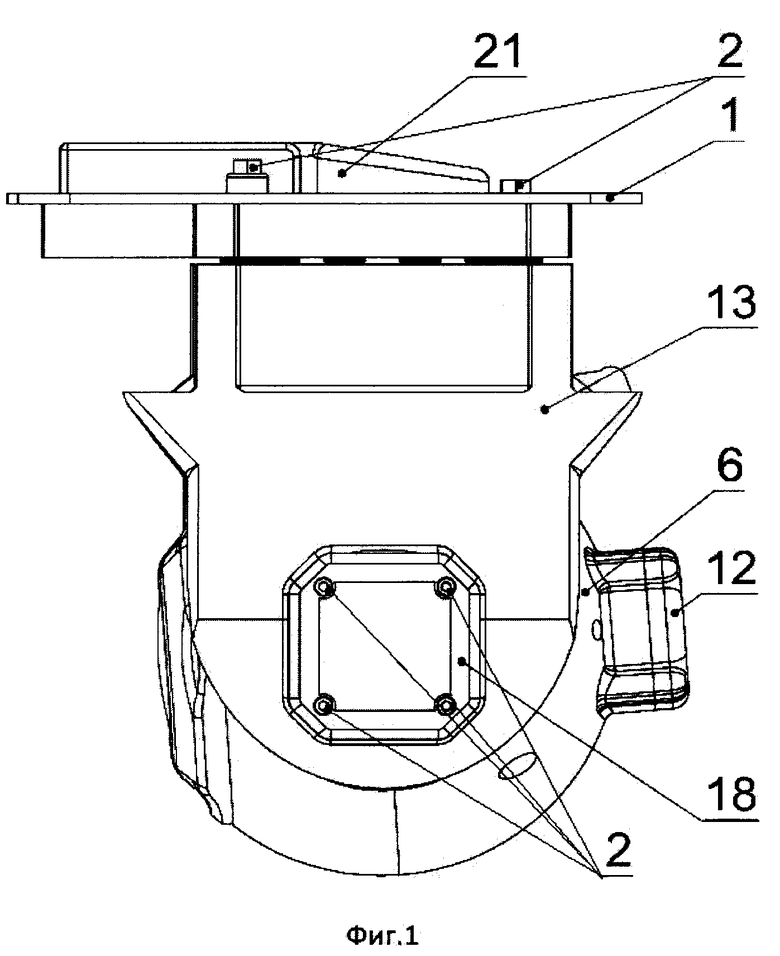
Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного средства, состоящая из трехстепенного гироскопа, датчиков момента угла, рам тангажа и крена, следящей системы стабилизации, виброгасительных элементов, отличающаяся тем, что система стабилизации выполнена в виде крепежной площадки, к которой болтовым соединением крепится нижняя опора демпфера, при этом между нижней и верхней опорами демпфера расположены виброгасительные элементы, выполненные в виде двенадцати круглых резиновых демпферов, опоры демпфера выполнены из углепластика, рама тангажа представляет собой ферму тангажа, выполненную в виде платформы, на которой посредством болтового соединения закреплен табурет с установленным внутри электромотором крена, датчик угла крена и крышка датчика угла крена расположены на верхней части табурета с электромотором крена, ферма панорамирования выполнена в виде основания, которое имеет болтовое соединение с электромотором панорамирования, на основании фермы панорамирования установлен датчик угла тангажа, напротив которого установлен табурет с установленным внутри электромотором тангажа, крышка которого установлена в верхней части табурета с электромотором тангажа, крышка датчика угла тангажа установлена на основании посредством болтового соединения, электромотор крена соединен болтовым соединением с консолью крена, на которой закреплены видеокамера, плата управления видеокамерой и трехстепенный гироскоп, установленный под видеокамерой, при этом видеокамера и плата управления видеокамерой соединены между собой проводами, подшипник крена установлен между консолью крена и платформой тангажа, электромотор панорамирования имеет болтовое соединение с верхней опорой демпфера и соединен посредством проводов с датчиком угла панорамирования, при этом крышка датчика угла панорамирования расположена на верхней опоре демпфера и является общей с контроллером, который установлен на верхней опоре демпфера и имеет возможность подключения к автопилоту беспилотного воздушного средства, провода от электромотора крена, датчика угла крена, платы управления видеокамерой и трехстепенного гироскопа проходят через полый вал электромотора тангажа, где к ним присоединяются провода от мотора тангажа, и которые все вместе на выходе подключены к подвижной стороне контактного кольца скольжения, к которой также подключены провода датчика угла тангажа, и которые все вместе от неподвижной стороны контактного кольца скольжения проведены через полый вал электромотора панорамирования, где к ним присоединены провода мотора панорамирования и датчика угла панорамирования, на выходе провода от платы управления видеокамерой имеют подключение к автопилоту беспилотного воздушного средства, остальные провода имеют соединение с контроллером.
| ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2006 |
|
RU2329467C1 |
| Гладильная машина | 1958 |
|
SU120491A1 |
| АППАРАТ ДЛЯ ОТДЕЛКИ ЖГУТА УСАДОЧНЫХ ТЕКСТИЛЬНЫХ МАТЕРИАЛОВ | 0 |
|
SU183717A1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| Противотанковая мина "Стрекоза-М" с возможностью пространственного перемещения с зависанием и переворачиванием в воздухе, разведки, нейтрализации и поражения мобильных бронированных целей | 2016 |
|
RU2628351C1 |
| Токарный резец | 1924 |
|
SU2016A1 |

