Изобретение относится к сельскохозяйственному машиностроению, а именно к машинам для химической защиты растений.
Известно устройство, выполненное в виде замкнутой системы регулирования опрыскивателя с входом от преобразователя давления и радиолокационного измерителя скорости и выходом к установленному в напорной магистрали опрыскивателя редукционному клапану с сервоприводом (Кокс С.У.Р. Микроэлектроника в сельском хозяйстве. М. Агропромиздат, 1986, с. 93-94).
Известен микропроцессорный регулятор расхода рабочей жидкости Dositron выпускается германской фирмой "Holder" (Feldcspritsgerate mit Dositron: Рекламный проспект фирмы "Holder"). Dositron состоит из микропроцессорного "мозга" с монитором, датчика давления и регулирующего клапана, установленных в напорной магистрали опрыскивателя и датчика скорости.
Принцип работы этих устройств примерно одинаков.
По результатам измерений давления рабочей жидкости в магистрали и скорости движения агрегата микропроцессор вычисляет мгновенное значение фактического расхода жидкости и сравнивает его с заданным, в случае их несоответствия формируется сигнал управления регулирующим клапаном, который изменяет давление на распыливающих наконечниках с целью компенсации отклонения.
К недостаткам данных устройств следует отнести то, что управление расходом жидкости осуществляется по мгновенным значениям давления жидкости и скорости движения агрегата, которые, в силу случайного характера этих процессов не могут характеризовать качество работы опрыскивателя, а следовательно, служить поводом для формирования сигнала на исполнительный механизм (регулирующий клапан) для поднастройки. Кроме этого, указанные устройства не учитывают концентрацию раствора рабочей жидкости, что не позволяет эффективно, в соответствии с агротехническими требованиями осуществлять химическую обработку растений, что отрицательно сказывается на урожайности возделываемых сельскохозяйственных культур.
Наиболее близкой к изобретению по технической сущности является микропроцессорная система автоматического контроля и управления расходом жидкости (САУРЖ 2), в которую входит пульт управления преобразователь скорости движения агрегата, преобразователь, давления, установленный в напорной магистрали в непосредственной близости от штанги, и исполнительный механизм, расположенный в напорной или переливной магистрали.
Система работает в трех режимах: в режиме программирования осуществляется ввод настроечных значений контролируемых параметров; в режиме опробирования проверка работоспособности системы и в режиме "работа" осуществляется обработка сигналов, поступающих от датчиков, вычисление по ним фактических значений контролируемых параметров, в случае их несоответствия настроечным значениям вырабатывается сигнал исполнительному механизму на поднастройку.
К недостаткам данного устройства следует отнести прежде всего то, что управление расходом рабочей жидкости (ядохимиката) осуществляется по результатам измерений общего расхода жидкости, когда как эффективность химической защиты растений зависит не от общего расхода рабочей жидкости, а от количества препарата (или действующего вещества), находящегося в растворе и приходящегося на единицу площади обрабатываемого поля (Справочник агронома Нечерноземной зоны (В.И.Балюра, Н.И.Барашков, В.Г.Безуглов и др. Под ред. Г.В. Гуляева 2-е изд. доп. и перераб. М. Колос, 1980. 576 с.).
Количество препарата в растворе (концентрация) будет изменяться при каждой новой заправке опрыскивателя рабочей жидкостью (за одну смену для некоторых типов опрыскивателей число технологических заправок может достигать несколько десятков), поскольку приготовить раствор заданной концентрации практически невозможно, следовательно будет отклоняться от допускаемых значений и количество действующего вещества, приходящегося на единицу площади обрабатываемого поля, что ведет к снижению урожайности возделываемых культур и отрицательно влияет на экологическую обстановку. Особенно важно учитывать концентрацию раствора при малообъемном и ультрамалообъемном способах опрыскивания, находящих в последнее время все большее распространение, при которых уменьшен расход жидкости, а концентрация раствора увеличена (Лурье А.Б. Гусинцев Ф. Г. Давидсон Е.И. Сельскохозяйственные машины. 2-е изд. перераб. и доп. Л. Колос, 1983, 383 с.).
Цель изобретения повышение функциональных возможностей устройства, улучшение условий труда механизатора, повышение достоверности оценок качества и экологической безопасности полевых опрыскивателей.
Это достигается тем, что устройство управления расходом рабочей жидкости полевыми опрыскивателями с коррекций на концентрацию раствора, содержащее блок управления, состоящий из микроЭВМ, электрически связанной по системной магистрали с блоком отображения информации, блоком клавиатуры, портом ввода-вывода информации и программируемым таймером, причем внешний вход порта ввода-вывода информации подключен к электрическому выходу позиционного датчика, установленного на силовом приводе, имеющем механическую связь с гидронасосом, вход которого посредством всасывающего патрубка и фильтрующего элемента сообщается с баком с рабочей жидкостью, а выход гидронасоса соединен с напорной и переливной магистралями опрыскивателя, при этом напорная магистраль опрыскивателя соединена со штангой с распылителями, а переливная имеет установленный в ней перепускной клапан и сообщается с баком с рабочей жидкостью, установленным на опорные колеса, на одном из которых закреплен датчик скорости, соединенный своим выходом с одним из входов программируемого таймера, а перепускной клапан механически связан с электродвигателем, электрический вход которого подключен через усилитель мощности к первому внешнему выходу порта ввода-вывода информации. При этом устройство дополнительно снабжено излучателем и приемником акустических колебаний, установленных в напорной магистрали навстречу друг другу, причем вход излучателя акустических колебаний подключен к коллектору n-p-n-транзистора и через первый резистор к коллектору p-n-p-транзистора, при этом базовый вход n-p-n-транзистора подключен к выходу высокочастотного генератора импульсов, а его эмиттерный выход заземлен, эмиттерный выход p-n-p-транзистора подключен к источнику питания и через второй резистор соединен с своим входом и через третий резистор электрически связан с выходом низкочастотного генератора прямоугольных импульсов и входом первого инвертора, выход которого подключен к входу С-триггера, вход D которого соединен через четвертый резистор с источником напряжения +5 В, а вход R подключен к выходу элемента ИЛИ, причем первый вход последнего подключен к второму внешнему выходу порта ввода-вывода информации, а второй вход элемента ИЛИ через последовательно соединенные второй инвертор и усилитель-формирователь к выходу приемника акустических колебаний, при этом выход Q триггера электрически связан с одним из внешних входов программируемого таймера, к информационному входу которого подключен генератор тактовых импульсов.
Перечисленные отличительные признаки в совокупности с известными обеспечивают получение технического результата, заключающегося в повышении функциональных возможностей устройства за счет установки в напорной магистрали опрыскивателя на расстоянии и навстречу друг другу излучателя и приемника акустических колебаний, что позволяет измерять время прохождения акустических колебаний от источника к приемнику в измеряемом веществе. При этом вход излучателя акустических колебаний подключен к точке соединения коллекторного выхода n-p-n-транзистора и первого резистора, а базовый вход n-p-n-транзистора подключен к выходу высокочастотного генератора импульсов, его эмиттерный вход заземлен, а второй выход первого резистора подключен к коллекторному выходу p-n-p-транзистора, эмиттерный вход которого подключен к источнику питания и через второй резистор соединен со своим базовым входом и выходом третьего резистора, вход которого электрически связан с выходом низкочастотного генератора прямоугольных импульсов, что позволяет излучателю акустических колебаний посылать к приемнику пачки импульсов.
Время между пачками импульсов задается низкочастотным генератором. За это время производятся необходимые расчеты и измерения. Частота следования импульсов в пачке задается высокочастотным генератором и является резонансной для акустических излучателя и приемника, что позволяет получить максимальную амплитуду измеряемого сигнала, уменьшить влияние помех и повысить точность измерений. Подключение выхода низкочастотного генератора через первый инвертор к выходу С триггера, вход D которого электрически связан через четвертый резистор с источником питания, а вход R через второй инвертор и элемент ИЛИ соединен с одним из внешних выходов порта ввода-вывода информации и через усилитель-формирователь с выходом приемника акустических колебаний, позволяет на выходе Q-триггерра получать импульс, длительность которого равна времени прохождения акустического сигнала от источника к приемнику. А подключение Q-выхода триггера к одному из внешних входов программируемого таймера позволяет осуществлять измерение времени прохождения акустического сигнала от излучателя к приемнику.
Измерение концентрации рабочего раствора основано на измерении разности распространения акустических колебаний в средах разной плотности (вода и водный раствор препарата). Поскольку большинство препаратов, используемых для химической защиты растений, это производные феноксиуксусных, феноксимасляных, феноксипропионовых, алифатических карбоновых и других кислот, плотность которых отлична от плотности воды, следовательно, при смешивании указанных препаратов с водой будет образовываться раствор, плотность которого будет отличаться от плотности воды, а следовательно, другим будет и время распространения акустических колебаний от излучателя к приемнику. Если τ время распространения акустических колебаний от излучателя к приемнику в неподвижной воде, а τ1 время распространения акустических колебаний от излучателя к приемнику в неподвижном растворе, тогда концентрация препарата в воде будет определяться по формуле:
Б%  ·100% где μ коэффициент пропорциональности, получаемый при тарировке измерительного канала.
·100% где μ коэффициент пропорциональности, получаемый при тарировке измерительного канала.
Коррекция расхода рабочей жидкости на концентрацию раствора осуществляется при работе опрыскивателя, когда по напорной магистрали движется поток рабочей жидкости. Если Vl скорость потока, усредненная по длине l, а акустический луч направлен в сторону потока, во время τ2прохождения им расстояния l определяется из уравнения τ2 l/(c + Vl cos α), где с скорость распространения акустических колебаний в неподвижном измеряемом веществе; α 90о θ угол, под которым распространяются колебания относительно оси напорной магистрали; θ угол, под которым установлены излучатель и приемник относительно оси напорной магистрали. Но, поскольку θ 90о, следовательно cos α 1, a c l/τ1, тогда τ2 l/(l/τ1 + Vl). Таким образом, зная τ1 и l и измеряя в процессе работы опрыскивателя время τ 2, можно вычислить скорость потока Vl l(τ 1 τ 2)/τ 1 τ 2. А из условия неразрывности струи известно, что минутный расход жидкости Qм связан со скоростью Vlсоотношением Qм k Vl, где k коэффициент пропорциональности, который можно получить при тарировке датчика, либо рассчитать, используя соотношение k ρ F, где F площадь поперечного сечения трубы напорной магистрали; ρ плотность вещества (раствора). По известному τ 1плотность рассчитывается как ρ μ 1 τ 1, где μ 1 тарировочный коэффициент.
Норму расхода жидкости θ ф рассчитывают по формуле
θф=  где V скорость движения агрегата, км/ч; В ширина захвата опрыскивателя, м.
где V скорость движения агрегата, км/ч; В ширина захвата опрыскивателя, м.
Тогда по известной норме расхода Qф и проценту препарата в растворе Б доза препарата в пересчете на 1 га обрабатываемой площади будет определяться как
Dф=  л/га
л/га
Таким образом, измеряя перед началом работы, после заправки опрыскивателя рабочей жидкостью, концентрацию раствора и, измеряя в процессе работы расход рабочей жидкости, устройство позволяет корректировать общий расход рабочей жидкости в зависимости от изменения концентрации раствора, выдерживая при этом заданную дозу внесения препарата Dн, л/га, что повышает эффективность химической защиты растений, снижает перерасход дорогостоящего препарата, уменьшает вероятность химического загрязнения окружающей среды и способствует повышению урожайности возделываемых культур.
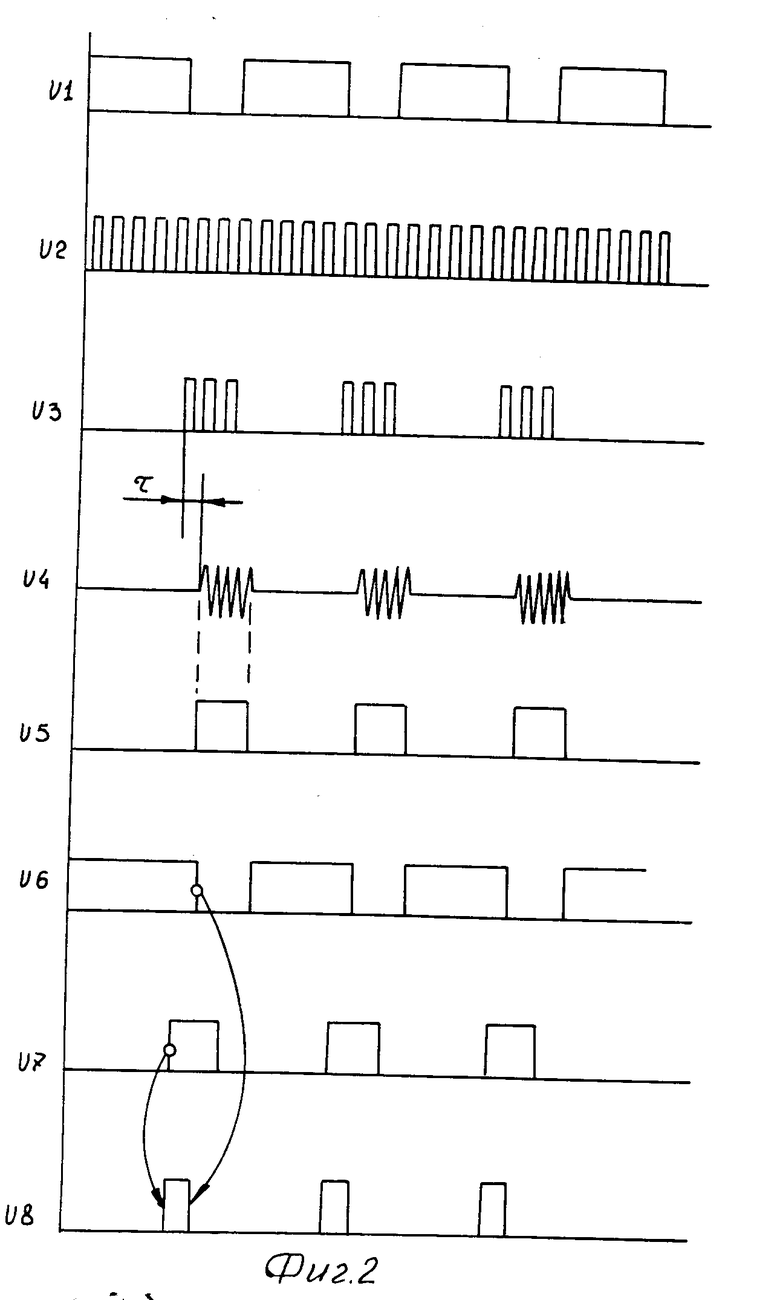
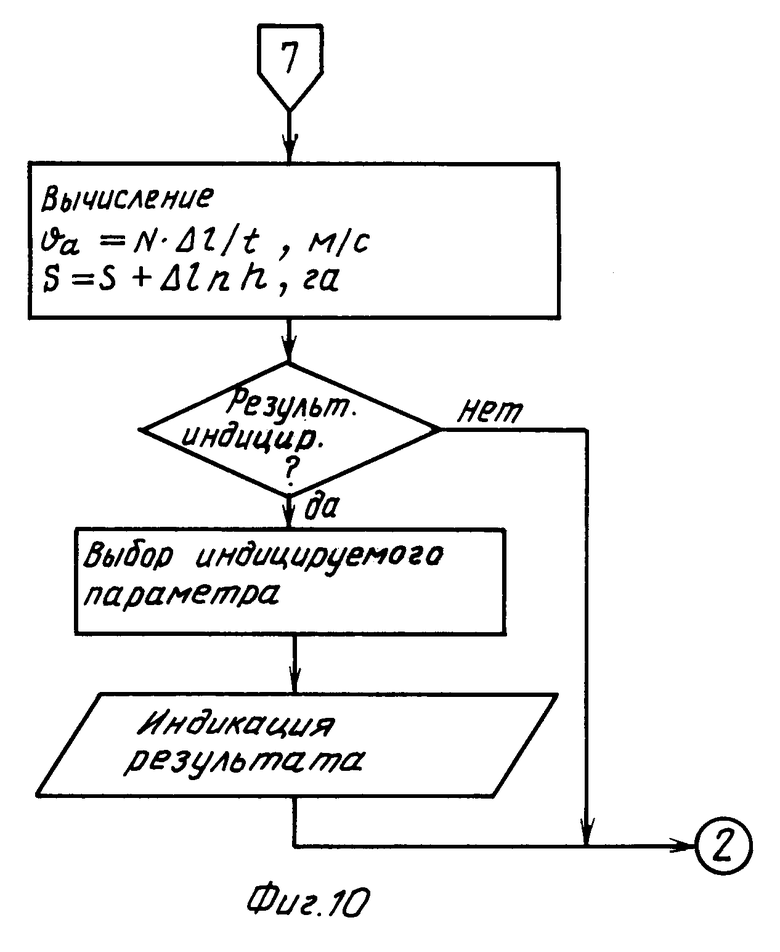
На фиг.1 представлена блок-схема устройства управления расходом рабочей жидкости полевыми опрыскивателями с коррекцией на концентрацию раствора; на фиг. 2 временная диаграмма работы измерительного канала устройства; на фиг.3 -10 блок-схема алгоритма работы устройства управления расходом рабочей жидкости полевыми опрыскивателями с коррекцией на концентрацию раствора.
Устройство содержит блок управления, состоящий из микроЭВМ 1, выполненной на унифицированных элементах программируемого набора и имеющей электрическую связь по системной магистрали 2 с блоком 3 отображения информации, блоком клавиатуры 4, портом ввода-вывода информации 5 (например, К 580 ВВ55) и программируемым таймером 6 (например, К 580 ВИ 53). Внешний вход порта ввода-вывода информации 5 подключен к выходу позиционного датчика 7, установленного на силовом приводе 8, механически связанном с гидронасосом 9, вход которого посредством всасывающего патрубка 10 и через фильтрующий элемент 11 сообщается с баком 12 с рабочей жидкостью.
Выход гидронасоса 9 соединен с напорной 13 и переливной 14 магистралями опрыскивателя. В переливной магистрали 14, сообщающейся с баком 12 установлен перепускной клапан 15, имеющий механическую связь с электродвигателем 16, например реверсивным постоянного тока. Электрический вход электродвигателя 16 подключен через усилитель мощности 17 (например, транзисторный) к первому внешнему выходу порта ввода-вывода информации 5. В напорной магистрали 13, сообщающейся со штангой 18 с распылителями 19 установлены излучатель 20 и на расстоянии от него приемник 21 акустических колебаний, например пьезоэлементы, работающие в ультразвуковом диапазоне частот.
Вход акустического излучателя 20 подключен к точке соединения коллекторного выхода n-p-n-транзистора 22 и первого резистора 23. При этом база n-p-n-транзистора 22 подключена к выходу высокочастотного генератора импульсов 24, его эмиттерный выход заземлен. Второй выход первого резистора 23 подключен к коллектору p-n-p-транзистора 25, эмиттер которого подключен к источнику питания и через второй резистор 26 соединен со своим базовым входом и выходом третьего резистора 27, вход которого электрически связан с выходом низкочастотного генератора 28 прямоугольных импульсов, и входом первого инвертора 29.
Выход первого инвертора 29 подключен к входу С триггера 30 (например, К 155 ТМ8 или К 555 ТМ9), вход D которого соединен через четвертый резистор 31 с источником напряжения +5 В, а вход R подключен через второй инвертор 32 к выходу элемента ИЛИ 33. Причем первый вход элемента ИЛИ 33 подключен к второму внешнему выходу порта ввода-вывода информации 5, а второй вход элемента ИЛИ 33 через усилитель-формирователь 34 к выходу приемника акустических колебаний 21. Выход Q триггера 30 электрически связан с первым внешним входом программируемого таймера 6, к второму внешнему входу которого подключен электрический выход датчика пути 35, а к информационному входу генератор 36 тактовых импульсов.
Устройство работает по программе, хранимой в памяти микроЭВМ.
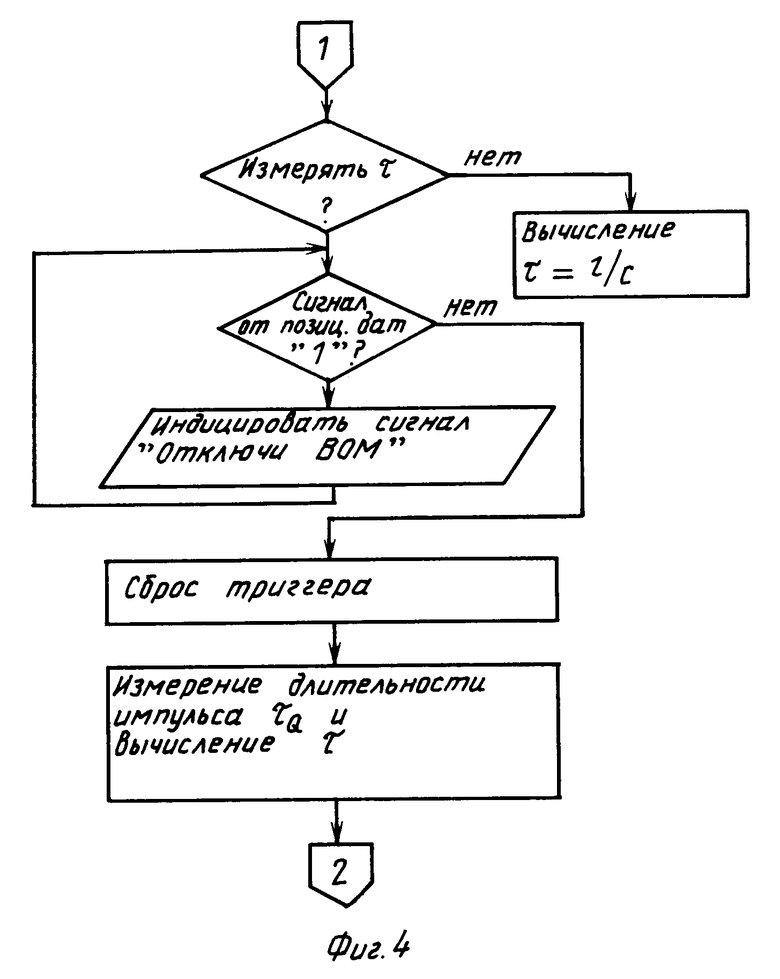
Перед началом работы, после заправки опрыскивателя рабочей жидкостью (гербицидом или пестицидом) и после самодиагностики устройства необходимо в память микроЭВМ при помощи клавиатуры 4 ввести значения постоянных коэффициентов, необходимых для расчета оценочных показателей качества работы опрыскивателя. Последовательно вводятся: n число распылителей, установленных на штанге; h шаг между распылителями; вид вносимого препарата; Dн заданная (настроечная) доза внесения препарата (ядохимиката); при необходимости вводится β величина агротехнического допуска на отклонения фактических значений контролируемого параметра D (l) от настроечного Dн (по умолчанию β 0,10). Правильность вводимых параметров контролируется визуально на блоке 3 индикации. После ввода коэффициентов вычисляются верхняя (1 + β)Dн и нижняя (1 β)Dн границы допускаемого интервала на колебания контролируемого параметра Dф(l). После этого на индикаторе появляется запрос "измерять τ".
Для продолжения работы нажатием на блоке клавиатуры 4 клавиш "Да" либо "Нет" определяется значение времени τ распространения акустических колебаний от излучателя 20 к приемнику 21. При нажатии клавиши "Нет" время τ определяется как τ l/c0, где l расстояние от излучателя 20 до приемника 21; с0 1485 м/c скорость распространения звуковых колебаний в воде.
Перед нажатием клавиши "Да" бак 12 опрыскивателя и его напорная 13 и переливная 14 магистрали должны быть заполнены водой. Этот режим используют в том случае, когда рабочий раствор готовят непосредственно в баке 12 опрыскивателя. Силовой привод 8 в этом случае должен быть отключен. При включенном силовом приводе 8 от позиционного датчика 7 на внешний вход порта ввода-вывода информации 5 поступает сигнал в виде логической "1", который по системной магистрали 2 передается в микроЭВМ 1. По этому сигналу микроЭВМ в режиме измерения индицирует на блоке индикации 3 сигнал "Отключи ВОМ" и переходит в режим ожидания сигнала логический "0" от позиционного датчика 7.
После отключения силового привода 8, сигнал логический "0" от позиционного датчика 7 поступает на внешний вход порта ввода-вывода информации 5. Этот сигнал является разрешающим для осуществления измерений времени τ прохождения акустического сигнала от источника 20 до приемника 21 в вводе.
Указанные измерения осуществляются следующим образом. МикроЭВМ 1, взаимодействуя по системной магистрали 2 с портом ввода-вывода информации 5, формирует на втором внешнем выходе последнего короткий импульс, который поступает на первый вход элемента ИЛИ 33. Этот импульс с выхода элемента ИЛИ 33 проходит через второй инвертор 32 и поступает на вход R триггера 30, осуществляя сброс и подготовку его к работе.
После этого срезом импульса (U1 на фиг.2), поступающим от низкочастотного генератора 28 на вход первого инвертора 29, формируется на выходе последнего, а следовательно, и на входе С триггера 30 положительный перепад напряжений от низкого уровня сигнала к высокому (фронт импульса) (U7 на рис.2). Этим перепадом на выходе Q триггера 30 устанавливается сигнал, по уровню соответствующий уровню сигнала на входе D триггера 30. А поскольку вход D триггера 30 подключен через четвертый резистор 31 к источнику напряжения +5 В, что соответствует сигналу логическая "1", то на выходе Q триггера 30 устанавливается сигнал, соответствующий логической "1".
Одновременно с этим импульсы от низкочастотного генератора 28 поступают через третий резистор 27 на базу p-n-p-транзистора 25. Второй 26 и третий 27 резисторы подобраны таким образом, что p-n-p-транзистор 25 открывается при низком уровне сигнала U1, поступающего на его базу от низкочастотного генератора 28. При открытом p-n-p-транзисторе 25 напряжение Uп от источника питания поступает через первый резистор 23 либо на вход излучателя акустических колебаний 20, либо при открытом n-p-n-транзисторе 22 через его эмиттерно-коллекторный переход на землю, поскольку электрическое сопротивление акустического излучателя 20 значительно больше, чем электрическое сопротивление n-p-n-транзистора 22.
Для предохранения от короткого замыкания при открывании n-p-n-транзистора 22 в схему включен первый резистор 23, n-p-n-транзистор 22 открывается с частотой импульсов, поступающих на его базовый вход с выхода высокочастотного генератора 24. Этим самым на вход излучателя акустических колебаний 20 поступает пачка импульсов U3, длительность которых зависит от длительности сигнала низкого уровня, поступающего с выхода низкочастотного генератора 28 через третий резистор 27 на базу p-n-p-транзистора 25. Частота импульсов в пачке является резонансной для излучателя 20 и приемника 21 акустических колебаний, что позволяет достичь максимальной амплитуды сигнала и уменьшить влияние помех.
Пачка импульсов акустического сигнала, излучаемого излучателем 20, проходя за время τ расстояние l воспринимается приемником 21. При этом на выходе последнего фоpмируется пачка импульсов пилообразной формы U4, поступающих на вход усилителя-формирователя 34. С выхода последнего сигнал в виде прямоугольного импульса U5 поступает на второй вход элемента ИЛИ 33, с выхода которого этот импульс поступает на вход второго инвертора 32. При этом на входе последнего устанавливается сигнал низкого уровня (U6 на рис.2). Этим сигналом, поступающим на вход R триггера 30, осуществляется сброс и формирование на его выходе Q импульса (U8). Длительность этого импульса зависит от разности времени между импульсами, поступающими на вход С и выход R триггера 30, а поскольку на вход С триггера 30 импульс поступает одновременно с пачкой импульсов, поступающей на вход излучателя акустических колебаний 20, а на вход R импульс от приемника акустических колебаний 21, то разность времени между этими импульсами есть время распространения акустических колебаний в измеряемом веществе τ на фиг.2).
С выхода Q триггера 30 прямоугольный импульс поступает на первый вход программируемого таймера 6, где длительность измеряемого сигнала определяется по количеству импульсов, поступивших на его информационный вход от генератора 36 тактовых импульсов. После завершения измерения микроЭВМ 1 по системной магистрали 2 считывает из программируемого таймера 6 код, соответствующий времени распространения акустического сигнала от излучателя 20 до приемника 21, и заносит результат в оперативную память для использования его в дальнейших вычислениях.
После приготовления в баке 12 рабочего раствора необходимо, включив в работу силовой привод 8 и гидронасос 9, заполнить напорную 13 и переливную 14 магистрали опрыскивателя рабочей жидкостью. После чего, отключив силовой привод 8 от гидронасоса 9, необходимо произвести измерение времени τ1 распространения акустического сигнала от излучателя 20 до приемника 21 в растворе. Процедура измерения τ1 аналогична процедуре измерения τ По значениям τ и τ 1 микроЭВМ вычисляет концентрацию рабочего раствора по формуле
Б%  ·100%
·100%
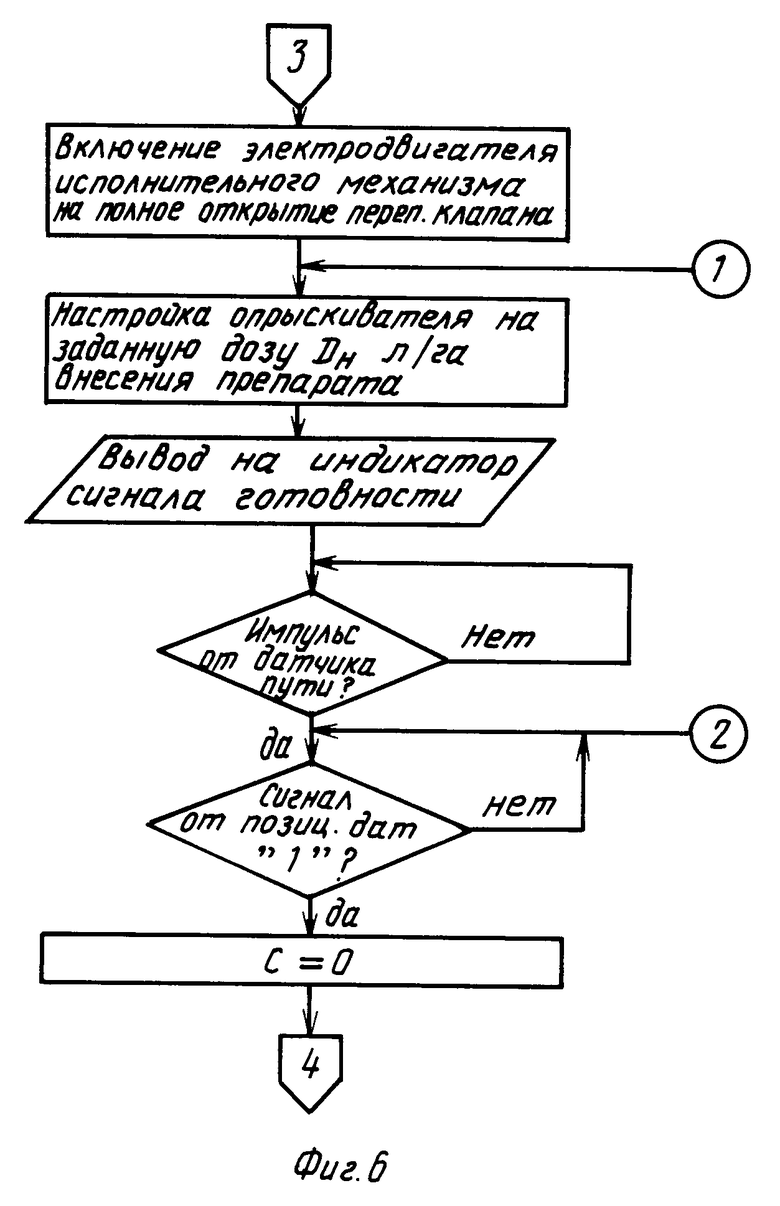
После выполнения всех необходимых расчетов микроЭВМ 1, сообщаясь по системной магистрали 2 с портом ввода-вывода информации 5, формирует на его первом внешнем выходе командный импульс в виде логической "1". Этот импульс поступает на вход усилителя мощности 17, с выхода которого подается сигнал на включение электродвигателя 16. Последний устанавливает перепускной клапан 15 в полностью открытое положение (если он не был раньше установлен в это положение). Время, на которое включается в работу электродвигатель 16, определяется длительностью командного импульса, формируемого на первом внешнем выходе порта ввода-вывода информации 5. При установке клапана 15 в полностью открытое положение длительность командного импульса заведомо больше времени, на которое необходимо включить электродвигатель, для того чтобы перевести перепускной клапан 15 из полностью закрытого положения в полностью открытое. Поскольку микроЭВМ 1 и электродвигатель 16 не замкнуты обратной связью, во избежание поломок последнего в усилителе мощности 17 предусмотрена блокировка командного импульса, поступающего на его вход с первого внешнего выхода порта ввода-вывода информации 5, при достижении перепускным клапаном 15 любого из крайних положений. Полностью открытое положение перепускного клапана 15 является начальной точкой отсчета, от которой микроЭВМ определяет положение перепускного клапана 15, соответствующее настроечному значению дозы внесения препарата Dн.
После того, как перепускной клапан 15 будет установлен в исходное положение (полностью открыт), микроЭВМ 1, управляя электродвигателем 16, осуществляет автоматическую настройку полевого опрыскивателя на заданную дозу внесения препарата Dн. Для этого командным импульсом, поступающим с первого внешнего выхода порта ввода-вывода информации 5 на вход усилителя мощности 17, включается электродвигатель 16 на время, необходимое для того чтобы перевести перепускной клапан 15 из полностью открытого положения в такое положение, при котором будет обеспечиваться заданная настройкой доза Dн. Длительность командного импульса Tsопределяется как Ts Ks Dн, где Ks коэффициент пропорциональности.
После того, как будут выполнены все процедуры, связанные с вычислениями и настройкой на заданную дозу Dн, на блоке индикации 3 включается сигнал, свидетельствующий о готовности устройства к работе.
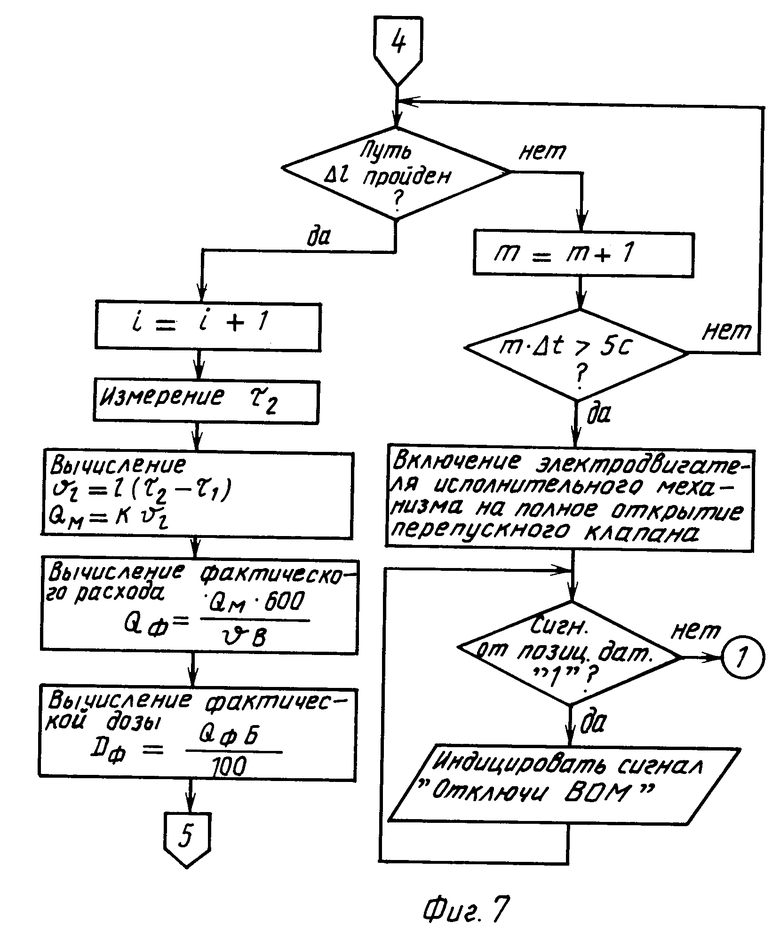
Запуск устройства в работу осуществляется импульсом, поступающим от позиционного датчика 7 на внешний вход порта ввода-вывода информации 5 при включении силового привода 8. В этом режиме при движении агрегата по полю с выхода датчика скорости 35 на вход программируемого таймера 6 поступают прямоугольные импульсы. Время между соседними импульсами соответствует времени, за которое агрегат проходит равные отрезки пути Δ l. Одновременно с этим осуществляется измерение времени τ2распространения акустических колебаний от источника 20 к приемнику 21 в движущемся потоке рабочей жидкости. Процедура измерения τ2 аналогична процедуре измерения τ и τ1. Если Vl скорость потока, усредненная по длине l, а акустический луч направлен в сторону движения потока, то время τ 2 прохождения им расстояния l и скорость потока Vl связаны уравнением τ 2 l/(c + Vl cos α ), где с скорость распространения акустических колебаний в неподвижном измеряемом веществе; α 90о θ угол, под которым распространяются акустические колебания относительно оси напорной магистрали 13; θ угол, под которым установлены излучатель 20 и приемник 21 относительно оси напорной магистрали. Но, поскольку θ 90о, следовательно cos α 1, a c l/τ1, тогда τ2 l/(l/τ1 + Vl). Таким образом, зная τ1 и l и измеряя в процессе работы полевого опрыскивателя время τ2, можно вычислять скорость потока Vl
Vl l( τ1 τ2)/ τ1 τ2
Из условия неразрывности струи известно, что минутный расход жидкости Qм л/мин связан со скоростью Vl соотношением: Qм K Vl, где К коэффициент пропорциональности, который можно получить при тарировке датчика, либо рассчитать, используя соотношение К ρ F, где F площадь поперечного сечения трубы напорной магистрали 13; ρ плотность вещества (раствора). По известному τ1 плотность рассчитывается как ρ μ1 τ1, где μ1 тарировочный коэффициент.
Норма расхода жидкости Qф (л/га) рассчитывается по формуле Qф Qм600/V B, где V скорость движения агрегата, км/час; В ширина захвата опрыскивателя, м.
Тогда по известной норме расхода Qф (л/га) и проценту препарата в растворе Б доза препарата в пересчете на 1 га обрабатываемой площади будет определяться как Dф Qф Б/100 л/га. Каждое вычисленное значение записывается в массив значений Dф(l) по i-му адресу, где i изменяется от 1 до N. После того, как агрегат пройдет контрольный (зачетный) участок длиной Lк N ˙Δ l 15. 20 м, где N число измерений достаточное, с точки зрения статистической достоверности информации, микроЭВМ 1 выполняет расчет оценочных показателей. Подсчитывается количество n+значений в массиве Dф(l), превысивших верхнюю границу агротехнического допуска (1 + β)Dн и количество n- значений ниже нижней границы агротехнического допуска (1 β)Dн, после чего вычисляется средняя относительная длительность Pβ нахождения контролируемого параметра Dф(l) в поле заданного агротехнического допуска β
Pβ 1- 
Если P P
P (в теории статистической динамикиPβ|доп.принимают равным 0,75; 0,70; 0,65 соответственно для легких, средних и тяжелых условий работы), то качество технологического процесса, выполняемого опрыскивателем, считается удовлетворительным. Если Pβ≥| Pβ|доп., то имеет место нарушение технологического процесса и для его автоматического устранения сравниваются между собой значения n+ и n-. Если n+ > n-, значит доза внесения препарата завышена и для ее уменьшения микроЭВМ, сообщаясь по системной магистрали 2 с портом ввода-вывода информации 5, включает через усилитель мощности 17 электродвигатель 16 на время, пропорциональное разности
(в теории статистической динамикиPβ|доп.принимают равным 0,75; 0,70; 0,65 соответственно для легких, средних и тяжелых условий работы), то качество технологического процесса, выполняемого опрыскивателем, считается удовлетворительным. Если Pβ≥| Pβ|доп., то имеет место нарушение технологического процесса и для его автоматического устранения сравниваются между собой значения n+ и n-. Если n+ > n-, значит доза внесения препарата завышена и для ее уменьшения микроЭВМ, сообщаясь по системной магистрали 2 с портом ввода-вывода информации 5, включает через усилитель мощности 17 электродвигатель 16 на время, пропорциональное разности  n+-n
n+-n для увеличения пропускного сечения перепускного клапана 15 и, следовательно, уменьшения потока жидкости в напорную магистраль 13 и штангу 18. Этим автоматически восстанавливается требуемая доза внесения препарата на 1 га.
для увеличения пропускного сечения перепускного клапана 15 и, следовательно, уменьшения потока жидкости в напорную магистраль 13 и штангу 18. Этим автоматически восстанавливается требуемая доза внесения препарата на 1 га.
В случае, когда n+ < n-, процедура поднастройки аналогична предыдущей с той лишь разницей, что электродвигатель 16 включается в противоположную сторону, чем уменьшается пропускная способность перепускного клапана 15 и увеличивается поток рабочей жидкости в напорную магистраль 13 и штангу 18 с распылителями 19, а вместе с этим увеличивается до заданного значения доза внесения препарата на 1 га. Информация о каждом нарушении технологического процесса отображается на индикаторе блока индикации 3. В том случае, когда Pβ≥| Pβ| доп.фактическая доза внесения препарата соответствует заданному (настроечному) значению, поднастройка не производится.
Для расчета второй и последующих оценок качества (Pβ ) с целью повышения оперативности и своевременности поднастроек в массиве значений Dф(l) при поступлении N+1-го значения, осуществляется сдвиг информации на один шаг влево. При этом первое значение отбрасывается, второе становится первым, третье вторым и так до N+1-го, которое становится N-ым. Этим обеспечивается на каждом шаге измерений Δl сохранение необходимого объема информации и достигается оперативность получения оценок качества.
Если после остановки агрегата (от датчика скорости 35 более 2 с, нет импульсов) не будет отключен силовой привод 3 от гидронасоса 9, во избежании повреждений растений и перерасхода ядохимиката, микроЭВМ 1, сообщаясь по системной магистрали 2 с портом ввода-вывода информации 5, включает через усилитель мощности 17 электродвигатель 16, обеспечивая тем самым слив всей рабочей жидкости из нагнетательной магистрали 13, через переливную магистраль 14 в бак 12, предотвратив тем самым поступление рабочей жидкости в штангу 18 и распылители 19.
Кроме оценочных показателей, в блоке управления осуществляется расчет текущих значений скорости движения агрегата (км/ч) и обработанной площади (га) и вывод этих значений по запросу на индикатор.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ РАБОЧЕЙ ЖИДКОСТИ В ШТАНГОВЫХ ОПРЫСКИВАТЕЛЯХ | 1991 |
|
RU2020818C1 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН ПНЕВМАТИЧЕСКОЙ СЕЯЛКОЙ | 1992 |
|
RU2043006C1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ, КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН И МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 1992 |
|
RU2043007C1 |
| Устройство для контроля и управления расходом рабочей жидкости в штанговых опрыскивателях | 1990 |
|
SU1739938A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАСХОДОМ КЛУБНЕЙ КАРТОФЕЛЕПОСАДОЧНОЙ МАШИНЫ | 1991 |
|
RU2034430C1 |
| СИГНАЛИЗАТОР ЗАГРУЗКИ ДВИГАТЕЛЯ | 1992 |
|
RU2027979C1 |
| ИЗМЕРИТЕЛЬ МАССЫ ЖИДКОСТИ, ТРАНСПОРТИРУЕМОЙ ПО НЕФТЕПРОВОДУ | 2007 |
|
RU2352905C2 |
| АГРЕГАТ МАЛООБЪЕМНОГО ОПРЫСКИВАНИЯ "ИРТЫШАНКА" | 2002 |
|
RU2231259C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ ИЛИ ГАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047097C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ ДЛЯ РЕВЕРСИРОВАНИЯ ЭЛЕКТРОПРИВОДОВ | 1990 |
|
RU2105342C1 |





Использование: в сельскохозяйственном машиностроении, в частности в устройствах управления расходом рабочей жидкостью полевым опрыскивателем с коррекцией на концентрацию раствора. Сущность изобретения: устройство предусматривает управление расходом рабочей жидкости полевыми опрыскивателями с учетом изменяющейся концентрации раствора за счет установки в напорной магистрали опрыскивателя на расстояние 1 и навстречу друг другу излучателя и приемника акустических колебаний и подключения излучателя через p-n-p-транзистор к генератору низкочастотных колебаний и через n-p-n-транзистор к выходу высокочастотного генератора. Приемник устанавливают через усилитель-формирователь, элемент ИЛИ и второй инвертор к входу R триггера. Вход C последнего соединен через первый инвертор с выходом низкочастотного генератора. При этом выход Q триггера подключен к первому внешнему входу програмируемого таймера, сообщающегося по системной магистрали с микроЭВМ. 10 ил.
УСТРОЙСТВО УПРАВЛЕНИЯ РАСХОДОМ РАБОЧЕЙ ЖИДКОСТИ ПОЛЕВЫМИ ОПРЫСКИВАТЕЛЯМИ С КОРРЕКЦИЕЙ НА КОНЦЕНТРАЦИЮ РАСТВОРА, содержащее блок управления, состоящий из микроЭВМ, электрически связанной по системной магистрали с блоком отображения информации, блоком клавиатуры, портом ввода-вывода информации и программируемым таймером, причем внешний вход порта ввода-вывода информации подключен к электрическому выходу позиционного датчика, установленного на силовом приводе, имеющем механическую связь с гидронасосом, вход которого посредством всасывающего патрубка и фильтрующего элемента сообщается с баком с рабочей жидкостью, а выход гидронасоса соединен с напорной и переливной магистралями опрыскивателя, при этом напорная магистраль опрыскивателя соединена с штангой с распылителями, а переливная имеет установленный в ней перепускной клапан и сообщается с баком с рабочей жидкостью, установленным на опорные колеса, на одном из которых закреплен датчик скорости, соединенный выходом с одним из входов программируемого таймера, а перепускной клапан механически связан с электродвигателем, электрический вход которого подключен через усилитель мощности к первому внешнему выходу порта ввода-вывода информации, отличающееся тем, что оно снабжено высоко- и низкочастотными генераторами импульсов, p n p- и n p n-транзисторами, инверторами, резисторами, триггером, элементом ИЛИ, усилителем-формирователем, излучателем и приемником акустических колебаний, установленными в напорной магистрали навстречу друг другу, причем вход излучателя акустических колебаний подключен к коллектору n p n-транзистора и через первый резистор к коллектору p n p-транзистора, при этом базовый вход n p n-транзистора подключен к выходу высокочастотного генератора импульсов, а его эмиттерный выход заземлен, эмиттерный выход p n p-транзистора подключен к источнику питания, через второй резистор соединен со своим входом и через третий резистор электрически связан с выходом низкочастотного генератора прямоугольных импульсов и входом первого инвертора, выход которого подключен к C-входу триггера, вход которого соединен через четвертый резистор с источником напряжения, а R-вход подключен к выходу элемента ИЛИ, причем первый вход последнего подключен к второму внешнему выходу порта ввода-вывода информации, а второй вход элемента ИЛИ подключен через последовательно соединенные второй инвертор и усилитель-формирователь к выходу приемника акустических колебаний, при этом Q-выход триггера электрически связан с одним из внешних входов программируемого таймера, к информационному входу которого подключен генератор тактовых импульсов.
| Галюс А.В., Ямпиков Ю.Н | |||
| Автоматический контроль и упраление в машинах для внесения жидких удобрений и нестицидов | |||
| В сб.: Автоматический контроль и сигнализация в сельскохозяйственных машинах | |||
| М: ВИСХОМ, 1989, с.50-56. |
