Изобретение относится к сельскохозяйственному машиностроению, а именно к машинам для химической защиты растений.
Известно устройство автоматического расхода рабочей жидкости, содержащее мембранный усилитель давления, управляющая камера которого связана с измерителем частоты вращения ходового колеса, выполненным в виде центробежного насоса с крыльчаткой, а рабочая камера связана с резервуаром для жидкости и регулирующим органом, связанным с напорной магистралью, отличающееся тем, что, с целью повышения точности дозирования, управляющая камера мембранного усилителя сообщена с центробежным насосом через задающий патрубок, который установлен в корпусе центробежного насоса параллельно плоскости вращения крыльчатки, причем заборный конец патрубка установлен навстречу направлению вращения крыльчатки с возможностью перемещения в радиальном направлении и фиксации, при этом регулирующий орган выполнен в виде патрубка, один конец которого размещен в рабочей камере мембранного усилителя,э
s|
CJ
ю ю
CJ
ioo
другой конец сообщен с магистралью подвода вносимой жидкости.
Данное устройство не исключает ручной настройки опрыскивателя на заданную норму расхода жидкости и не позволяет контролировать ее в процессе работы агрегата в поле с учетом изменяющихся внешних воздействий. Кроме того, устройство регулирует общий расход рабочей жидкости, не учитывая при этом засорения распылителей, их износа и утечек жидкости на штанге, К недостаткам этого устройства следует отнести также и его конструктивную сложность, что отрицательно сказывается на надежности машины.
Известно также устройство для учета и контроля работы мобильных сельскохозяйственных машин для внесения жидкостей преимущественно при химической защите или подкормке растений с насосом для создания давления вносимой жидкости.
По сравнению с предыдущим данное устройство позволяет контролировать и корректировать расход жидкости в процессе работы агрегата, сохраняя при этом остальные недостатки.
Известно также устройство, выполненное в виде замкнутой системы регулирования опрыскивателя с входом от преобразователя давления и радиолокационного измерителя скорости и выходом к установленному в напорной магистрали опрыскивателя редукционному клапану с сервоприводом аналогичен ему микропроцессорный регулятор расхода рабочей жидкости Positron, выпускается западногерманской фирмой Holder (Feldspritsgerate mit Dositrorr Рекламный проспект фирма Holder). Dositron состоит из микропроцессорного мозга с монитором, датчика давления и регулирующего клапана, установленных в напорной магистрали опрыскивателя, и датчика скорости.
Принцип работы этих устройств примерно одинаков.
По результатам измерений давления рабочей жидкости в магистрали и скорости движения агрегата микропроцессор вычисляет мгновенное значение фактического расхода жидкости и сравнивает его с заданным, в случае их несоответствия формируется сигнал управления регулирующим клапаном, который изменяет давление на распыливающих наконечниках с целью компенсации отклонения.
Управление расходом жидкости осуществляется по мгновенным значениям давления жидкости и скорости движения агрегата, которые в силу случайного характера этих процессов не могут характеризовать качество работы опрыскивателя, а следовательно, служить поводом для формиро- вания сигнала на исполнительный механизм (регулирующий клапан) для поднастройки. Кроме этого, указанные устройства не позволяют определить засорение распылителей, их износ, утечки жидкости на штанге, которые отрицательно влияют на эффективность применения гербицидов и
0 пестицидов, а в итоге и на урожай.
Наиболее близким к изобретению по технической сущности является микропроцессорная система автоматического контроля и управления расходом жидкости
5 (САУРЖ-2), в которую входит пульт управления, преобразователь скорости движения агрегата, преобразователь давления, установленный в напорной магистрали в непосредственной близости от штанги, и исполнительный механизм, устанавливае0 мый в напорной или переливной магистрали.
Система работает в трех режимах. В режиме программирования осуществляется ввод настроечных значений контро5 лируемых параметров, в режиме опробирования осуществляется проверка работоспособности системы и в режиме работа осуществляется обработка сигналов, поступающих от датчиков, вычисление по
0 ним фактических значений контролируемых параметров, в случае их несоответствия настроечным значениям вырабатывается сигнал исполнительному механизму на поднастройку.
5Недостатками этой системы является
то, что измерение расхода рабочей жидкости осуществляется косвенным методом по давлению, а установка преобразователя давления в напорной магистрали не позво0 ляет оценить равномерность расхода рабочей жидкости по ширине машины. Такой способ регулирования может привести к увеличению неравномерности расхода жидкости по ширине машины, что поясняет сле5 дующий пример. В случае засорения одного или нескольких распылителей (или возникновения в них вследствие износа утечек) произойдет уменьшение (увеличение) общего расхода рабочей жидкости, что зафикси0 руется датчиком, и поступит сигнал исполнительному механизму на увеличение (уменьшение) общего расхода жидкости. Следовательно, через оставшиеся работоспособными распылители расход будет уве5 личен (уменьшен), что отрицательно
повлияет на эффективность воздействия
гербицидов и пестицидов, а в итоге и на
урожай. Если в результате передозировки
ядохимиката растения и не погибнут, то
рост их будет замедлен, что приведет к уменьшению урожайности и увеличению содержания вредных для здоровья людей и животных элементов. К недостаткам данной системы следует отнести также и то, что сигналы управления исполнительному механизму вырабатываются после сравнения мгновенных значений расхода с настроечными, которые в силу случайного характера процесса, наблюдаемого при работе опрыскивателя, не могут характеризовать качество его работы, а следовательно, служить поводом для формирования управляющего сигнала исполнительному механизму.
Работа опрыскивателя с такой системой регулирования в полевых условиях, где он подвержен влиянию различного рода внешних воздействий (неровностей поверхности поля, влажности почвы и т.п.) может привести не к стабилизации расхода, а к обратному эффекту, увеличению неравномерности расхода рабочей жидкости из-за наложения естественной неравномерности процесса расхода жидкости с процессом автоколебательного режима работы электродвигателя исполнительного механизма, в котором он будет работать. Погрешность регулирования не более 3%, приведенная в описании, очевидно получена г-о результатам лабораторных испытаний, т.е. без учета влияния на опрыскиватель внешних возмущающих факторов.
Расчеты, производимые микропроцессором в процессе работы по громоздким и, к тому же приближенным формулам снижают быстоодействие системы .уменьшают частоту опроса датчиков (так, от датчика скорости за один оборот поступает только один импульс), что в результате снижает точность, достоверность информации и своевременность автоматических регулировок.
Все это снижает эффективность применения гербицидов и пестицидов, что отрицательно влияет не только на урожай, но и на экологическую безопасность опрыскивателя.
Поставленная цель достигается тем, что устройство для контроля и управления расходом рабочей жидкости в штанговых опрыскивателях содержит блок управления, включающий в себя микропроцессор, к входу которого подключена схема начальной установки, а выходы связаны с буфером адреса и схемой формирования управляющих сигналов, блок постоянной памяти, блок клавиатуры с контроллером клавиатуры, блок индикации с контроллером индикатора, динамическую головку с контроллером, дешифратор устройств, порт ввода-вывода информации и программируемый таймер,
связанные между собой по системной магистрали открытого типа, причем вход порта ввода-вывода информации подключен к позиционному датчику включения силового
привода насоса, сообщающегося всасывающим патрубком с рабочей жидкостью, а напорная магистраль насоса имеет установленный в ней датчик общего расхода рабочей жидкости со встроенным формиро0 вателем импульсов и соединяется со штангой, а распылителями и с переливной магистралью, сообщающейся с баком с рабочей жидкостью, установленным на опорные колеса, на одном из которых укреплен
5 датчик скорости движения агрегата со встроенным в нем формирователем импульсов, причем в переливной магистрали установлен регулируемый перепускной клапан, соединенный с электродвигателем, который
0 через усилитель мощности электрически связан с входом порта ввода-вывода информации микропроцессорного блока управления, для повышения функциональных возможностей устройства, улучшения усло5 вий труда механизатора, повышения равномерности распределения рабочей жидкости (гербицидов и пестицидов) по поверхности обрабатываемого поля в пределах заданного агротехнического допуска, повышения
0 экологической безопасности штанговых опрыскивателей устройство дополнительно снабжено датчиком расхода рабочей жидкости через один распылитель со встроенным в нем формирователем импульсов и уста5 новленным в штанге опрыскивателя между последним и предпоследним распылителями и электрически связанным с одним из входов программируемого таймера микропроцессорного блока управления, два дру0 гих входа которого подключены к входам датчика общего расхода жидкости и датчика скорости движения агрегата. В качества оценки равномерности распределения гербицидов и пестицидов по поверхности поля
5 используется вероятность нахождения контролируемого параметра в поле заданного агротехнического допуска, учитывающая случайный характер процессов.
Устройство дополнительно снабжено
0 датчиком расхода рабочей жидкости через один распылитель со встроенным в нем формирователем импульсов. Датчик установлен в штанге опрыскивателя между последним и предпоследним распылителя5 ми. Датчик электрически связан с одним из входов программируемого таймера микропроцессорного блока управления. Два других входа таймера подключены к выходам датчика общего расхода рабочей жидкости и датчика скорости движения агрегата.
Выявленные отличительные признаки в совокупности с известными обеспечивают получение положительного эффекта, заключающегося в возможности автоматического осуществления настройки опрыскивателя на заданные режимы работы, что улучшает условия труда механизатора, исключая его непосредственный контакт с ядохимикатом; в повышении равномерности распределения гербицидов и пестицидов по поверхности обрабатываемого поля за счет установки двух датчиков расхода - одного, общего расхода жидкости, установленного с напорной магистрали, и второго, датчика расхода рабочей жидкости через один распылитель установленного в штанге опрыскивателя между последним и предпоследним распылителями,что в свою очередь позволило производить оценку равномерности расхода рабочей жидкости как по ходу движения агрегата, так и по ширине захвата с использованием вероятностных методов. А подключение электрических выходов датчиков расхода рабочей жидкости и датчика скорости движения агрегата к входам программируемого таймера, используя его в качестве счетчика внешних событий, позволяет организовать работу микропроцессорного блока в многозадачном режиме, что повышает его быстродействие.точность и достоверность получаемых оценок качества, а следовательно, и достоверность подна- строек, необходимых в случае отклонения расхода рабочей жидкости за пределы заданного агротехнического допуска. Все это, в конечном счете, положительно сказывается на повышении урожайности возделываемых культур и способствует получению экологически безвредной продукции.
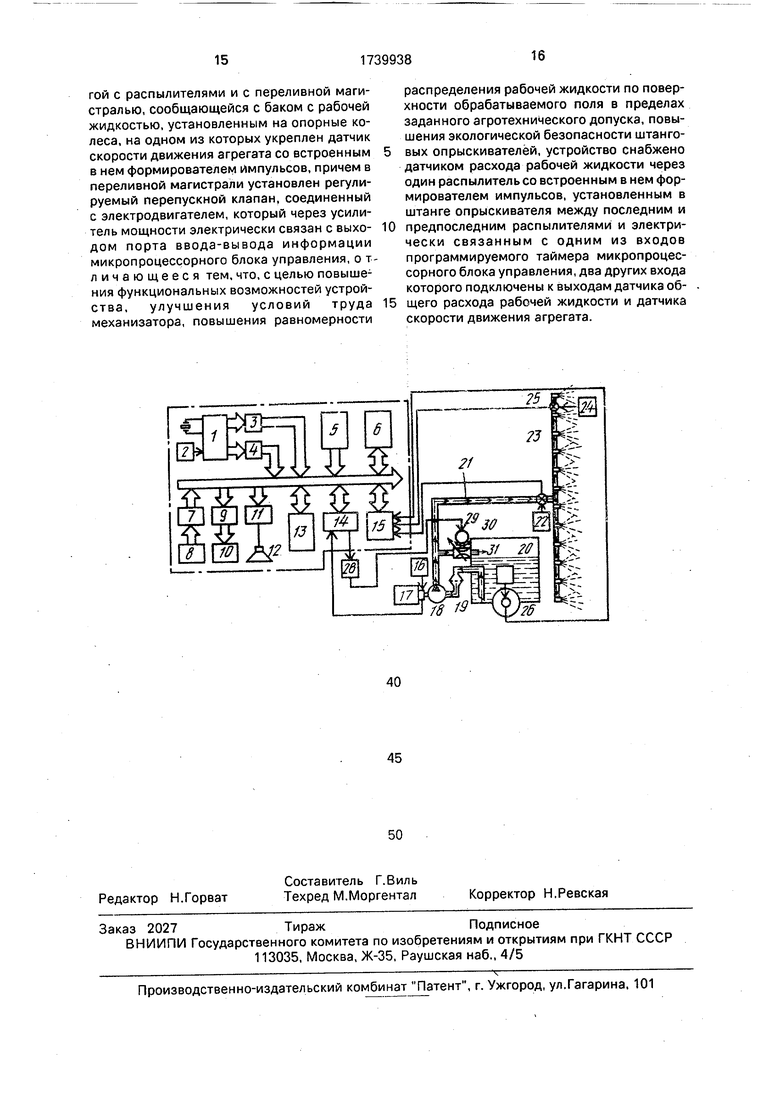
На чертеже приведена блок-схема устройства.
Устройство состоит из блока управления, установленного в кабине трактора, датчиков и исполнительного механизма, установленных на штанговом опрыскивателе.
Блок управления представляет собой микропроцессорную систему с магистраль- но-модульной архитектурой открытого типа, в состав которой входят универсальный 8- разрядный микропроцессор К 1821 ВМ85 I; цепь начальной установки 2; буфер адреса 3; схема формирования управляющих сигналов 4; блок постоянной памяти 5, выполненный на двух перепрограммируемых постоянных запоминающих устройствах типа К 573 РФ2 или К 573 РФ5 с общим объемом памяти в 16 Кбайт; блок оперативной памяти 6, выполненный на двух микросхемах статистического типа К 573 РУ10 с организацией 2Кх8; контроллер клавиатуры 7 с блоком матричной клавиатуры 8; контроллер индикации 9 с однострочным жидкокристаллическим индикатором 10; контроллер
5 звуковой сигнализации 11 с динамической головкой 12; дешифратор устройств 13, выполненный на К 155 ИДЗ; порт ввода-вывода информации 14, выполненный на программируемом параллельном адаптере
0 КР 580 ВВ55; программируемый таймер 15, выполненный на БИС КР 580 ВИ53. Все модули блока управления взаимодействуют между собой по системной магистрали открытого типа. Контроллеры клавиатуры 7,
5 индикации 9 и динамической головки 11 образуют узлы логического и электрического сопряжений, аппаратная реализация которых основана на использовании трех БИС: КР 580 ВВ79 - программируемый контроллер клавиатуры; КР 580 ВВ79 - программи0 руемый параллельный адаптер; КР 580 ВИ53 - программируемый таймер интервалов.
На опрыскивателе размещены позиционный датчик 16 включения силового приво5 да 17 (ВОМ трактора), приводящего в работу насос 18, сообщающийся всасывающим патрубком 19 с баком 20 с рабочей жидкостью; в напорной магистрали 21 установлен датчик общего расхода жидкости 22 со
0 встроенным формирователем импульсов; в штанге 23 опрыскивателя установлен датчик 24 общего расхода жидкости через один распылитель 25 со встроенным формирователем импульсов. На опорном колесе 26 ус5 тановлен частотный датчик скорости движения агрегата 27 со встроенным формирователем импульсов. Исполнительный механизм включает в себя транзисторный усилитель мощности 28, электродвигатель
0 29 и перепускной клапан 30, установленный в переливной магистрали 31 опрыскивателя. Датчики расхода представляют собой расходомеры, например турбинного типа. Формирователи импульсов являются усили5 телями-ограничителями, выполненными на компараторе серии К 554 САЗ, который включен по схеме триггера Шмидта, что позволяет получить требуемую форму и амплитуду выходного сигнала.
50 Устройство работает по программе, хранимой в блоке постоянной памяти 15 следующим образом.
Перед началом работы после заправки опрыскивателя рабочей жидкостью (герби5 цидом или пестицидом) с помощью клавиатуры 8 необходимо ввести в блок оперативной памяти 6 настроечные значения, требуемые для работы устройства; чис- лр распылителей п, шт.; шаг между
распылителями h, м; заданную дозу внесения рабочей жидкости (ядохимиката) KHq, л/м; величину агротехнического допуска Д % на колебания расхода ядохимиката от настроечного К определяемые агрономическими службами хозяйства. Правильностьвводимыхпараметровконтролируется визуально на жидкокристаллическом однострочном индикаторе 10. После включения силового привода (ВОМ трактора) 17, приводящего в работу насос 18, от позиционного датчика 16 через порт ввода-вывода 14 микропроцессору 1 поступает сигнал готовности. Микропроцессор 1 через порт ввода-вывода 14 и усилитель мощности 28 при помощи электродвигателя 29 исполнительного механизма устанавливает перепускной клапан 30 на перепуск жидкости в бак 20, при котором будет обеспечиваться заданный настройкой расход рабочей жидкости через распылители 25. Необходимое положение перепускного клапана 30 определяется временем, на которое будет включен электродвигатель 29 исполнительного механизма для того, чтобы перевести перепускной клапан из полностью открытого состояния, в которое он устанавливается после окончания работы, в требуемые по настройке.
Визуально убедившись в работоспособности всех распылителей 25, механизатор начинает движение агрегата, при этом от датчика скорости движения агрегата 26 на один из входов программируемого таймера 25 поступают прямоугольные импульсы. Время между соседними импульсами соответствует времени, за которое агрегат проходит равные промежутки пути Д . За время такого импульса программируемым таймером 15 осуществляется подсчет количества импульсов, поступивших на два других его входа от датчика общего расхода жидкости 22 и отдатчика расхода жидкости через один распылитель 25. Полученные таким образом значения числа импульсов в функции от пути f( Д I) будут соответствовать расходу жидкости Kq(l), л/м на участок длиной Д I, характеризующему равномерность распределения рабочей жидкости (ядохимиката) на поверхности обрабатываемого поля, что позволило исключить громоздкие и не совсем точные вычисления, связанные с пересчетом расхода жидкости, когда число импульсов подсчитывается в функции от времени f( Д t), как это сделано в прототипе. Значения общего расхода ядохимиката Kq(l) и значения расхода ядохимиката через один распылитель К q(l) микропроцессором 1 последовательно заносятся в блок оперативной памяти 6, где формируются два массива данных. После того как число значений N в массивах станет достаточным, с точки зрения достоверности
информации, для проведения статистических расчетов микропроцессором 1 осуществляется расчет оценочных показателей работы опрыскивателя, учитывающих случайную структуру процессов. Вначале оце0 нивается равномерность распределения рабочей жидкости (ядохимиката) по ширине захвата машины (вдоль штанги 23). Для этой цели по общему расходу рабочей жидкости Kq(l) вычисляется среднее значение расхода,
5 приведенное к расходу жидкости через
один распылитель mq J Kq(0/Nn, после
i 1 этого определяется верхняя (1 + /3)mq и
Q нижняя (1 -yS)mq границы допуска на колебания расхода ядохимиката по ширине захвата машины (вдоль штанги 23). Затем в массиве данных, полученных от датчика расхода жидкости через один распылитель,
с осуществляется подсчет числа значений п+, превысивших верхнюю границу допуска и п меньших нижней границы допуска. По этим результатам вычисляется средняя относительная длительность нахождения расходе
n рабочей жидкости в поле заданного агроте ническсго допуска Ре 1 - (п + + n)/N по ширине захвата машины. Если Р,|Рл1 Д0м (в теории статистической динамики i Pf, Д0п. принимают равным 0,75; 0,70; 0,65 соответственно для легких, средних и тяжелых условий работы), то равномерность расхода ядохимиката по ширине захвата машины с вероятностью Рр, считается удовлетворительной. Если PJS I Pf; |Доп., то на жидкокристаллическом индикаторе 10 появляется надпись, предупреждающая механизатора о необходимости проверить распылители и сопровождающая звуковым сигналом динамической головки 12, что свидетельствует о
5. высокой неравномерности расхода рабочей жидкости (ядохимиката) по ширине захвата машины, являющаяся следствием засорения или износа распылителей 29 либо утечек жидкости, наступивших в результате разгерметизации соединительных мест штанг- ги 23 и распылителей 25. В этом случае механизатору необходимо остановить агрегат и устранить неисправность.
Когда равномерность расхода рабочей
е- жидкости (ядохимиката) по ширине захвата машины будет удовлетворять агротехническим требованиям, микропроцессор 1 производит оценку равномерности расхода ядохимиката по ходу движения машины. Для этого обрабатывается массив данных.
5
0
0
полученных от датчика общего расхода ядохимиката 22. Поскольку в этом случае границы допуска связаны с настроечными значениями и не изменяются, пока не будут изменены последние, они вычисляются один раз, хранятся в блоке оперативной памяти 6 и вызываются микропроцессором 1 в случае необходимости. Верхняя граница допуска определяется как (1 + / )KHq и нижняя (1 -/3)KHq. После этого вычисляется число значений общего расхода ядохимиката, превысивших верхнюю границу допуска N+ и число значений меньше N нижней границы допуска, затем определяются относи- тельные длительности нахождения процесса выше верхней границы допуска
е N /N и ниже нижней границы допуска е . Оценка равномерности расхода ядохимиката в этом случае расчитывается как Pf, 1 - (Е +е). В том случае, когда РЙ |Р#1д0п., имеет место нарушение технологического процесса, для автоматического его устранения сравниI
ваются значения е иЈ . Если е Ј , значит расход жидкости занижен и для его увеличения через порт ввода-вывода информации 14 и усилитель мощности 28 включается электродвигатель 29 исполнительного механизма на время, пропорциональное
разности le - , что уменьшит пропускное сечение перепускного клапана 30 и увеличит поток жидкости в нагнетательную магистраль 21 и штангу 23, тем самым авто- матически восстанавливается требуемый расход рабочей жидкости через распылители 25. Когда Ј Ј(расход завышен), процедура поднастройки аналогична предыдущей стой лишь разницей, чтоэлек- тродвигатель 29 исполнительного механизма включается в противоположную сторону и приоткроет перепускной клапан 30 на перепуск жидкости в бак, уменьшив тем самым поток жидкости в нагнетательную магистраль 21 и, восстановив требуемый расход рабочей жидкости, после чего цикл расчетов повторяется. В том случае, когда Р ., расход ядохимикатов в норме, поднастройка не производится и цикл рас- четов повторяется. Для расчета второй и последующих оценок качества с целью повышения оперативности и своевременности поднастроек в массиве данных расходов рабочей жидкости при поступлении через Д N+1-го значения первое значение отбрасывается, второе становится первым, третье - вторым и так до N+1-го, которое становится N-ым. Тем самым в блоке оперативной памяти 16 осуществляется сдвиг информации и обеспечивается требуемый объем массивов, необходимый для расчетов оценочных показателей, на каждом шаге AI.
Например, имея путь, пройденный агрегатом между двумя импульсами AI 0,2 м при заданном числе N 128, первая оценка качества будет расчитана после того, как агрегат пройдет путь Д| 25,6м. Для расчета второй и последующих оценок, сохраняя последние Ni 127 значений показаний датчиков общего расхода рабочей жидкости 22 и расхода рабочей жидкости через один распылитель 24 и прибавляя к ним каждый раз новое значение, расчет вероятностных оценок качества процесса рае- номерности распределения рабочей жидкости по поверхности обрабатываемого поля будет производится через 0,2 м пройденного агрегатом пути. Это позволит своевременно, а следовательно, оперативно обнаруживать и устранять нарушения технологического процесса, что в свою очередь ведет к уменьшению площадей, обработанных с отклонениям от агротехнических требований, а значит к увеличению урожайности возделываемых культур и сведению к минимуму экологической опасности химической защиты растений.
Если после остановки агрегата (от дв(- чика скорости 27 более 2 с. нет импульсов) не будет отключен силовой привод (ВОМ трактора) 17, во избежание повреждения растений и перерасхода ядохимиката микропроцессор 1 через порт ввода-вывода информации 14 и усилитель мощности 28 включит электродвигатель 29 исполнительного механизма на полное открытие перепускного клапана 30, обеспечив тем самым слив всей рабочей жидкости из нагнетательной магистрали 21 через переливную магистраль 31 в бак 21, предотвратив тем самым поступление рабочей жидкости в штангу 23 и распылители 25.
Кроме оценочных показателей в микропроцессорном блоке осуществляется расчет по показаниям датчика скорости 27 текущих значений скорости движения агрегата в км/ч и обработанной площади в га.
В случае удовлетворительной с агротехнической точки зрения работы опрыскивателя (когда не высвечиваются сигналы аварийного предупреждения) на жидкокристаллическом индикаторе 10 по запросу с клавиатуры 9 могут в процессе работы выводиться текущие значения скорости движения агрегата, либо обработанной площади, либо текущих значений расхода ядохимиката.
По сравнению с прототипом предлагаемое устройство позволяет обеспечить рав- номерное распределение рабочей жидкости (гербицидов и пестицидов) по поверхности обрабатываемого поля за счет применения в устройстве микропроцессора К 1821 ВМ85; установки двух датчиков расхода рабочей жидкости, причем один установлен в напорной магистрали, а второй в штанге опрыскивателя между последним и предпоследним распылителями; подключения электрических выходов датчиков к входам программируемого таймера, работающего в режиме счетчика внешних событий; использования в качестве оценочного показателя вероятности нахождения контролируемого параметра в поле заданного агротехнического допуска, учитывающего случайный характер процессов; получить экономию ядохимиката за счет рационального распределения его по поверхности обрабатываемого поля; повысить производительность агрегата за счет сокращения времени на настройку и подготовку агрегата к работе и сокращения времени на контроль за качеством его работы; исключить необходимость во время выполнения технологической операции визуального контроля со стороны механизатора за работой распылителей, что ввиду особенностей рабочего процесса и конструкции штанговых опрыскивателей бывает затруднено, а в некоторых случаях невозможно (особенно при работе в вечерние и утренние часы, как это рекомендуется агротехникой); в любое время по запросу с клавиатуры механизатор может контролировать любой из интересующих его параметров технологического процесса; повысить своевременность и обоснованность автоматических регулировок за счет повышения достоверности оценок качества распределения рабочей жидкости по поверхности обрабатываемого поля, получение которых основано на методах статистической динамики.
Применение микропроцессора К 1821 ВМ85 вместо микроЭВМ КР 1816 ВЕ035 и микропроцессора КР 580ИК80, устанавливаемых на аналогичных отечественных устройствах, позволило повысить функциональные возможности устройства и его надежность Это достигнуто тем, что микропроцессор К 1821 ВМ85 в сравнении с микроЭВМ КР 1816 ВЕ035 обладает большими функциональными возможностями и имеет бльшое быстродействие. В сравнении с микропроцессором КР 580 ИК80 он содержит встроенный тактовый генератор, встроенную систему прерываний, последовательный ввод и вывод, что уменьшает число встроенных микросхем и, следовательно ведет к повышению надежности. Кроме того, потребляемая микропроцессором К 1821 ВМ85 мощность значительно ниже мощности, потребляемой сравниваемыми элементами, что важно для бортовых электронных устройств.
Подключение электрических выходов датчиков к входам программируемою тай0 мера, работающего в режиме счетчика внешних событий, позволило использовать работу микропроцессорного блока в многозадачном режиме, т.е. осуществлять одновременно подсчет чисел импульсов от
5 датчиков программируемым таймером и производить микропроцессором необходимые вычисления, что повысило быстродействие устройства, а следовательно, своевременность и точность поднастроек.
0 При использовании устройства на машинах, имеющих два канала регулирования (опрыскиватели ОП-2000 и ОП-3200), требуется лишь установка второго программируемого таймера, незначительная корректировка
5 программы работы и установка дополнительных датчиков и исполнительного механизма без снижения быстродействия и эффективности системы, что невозможно в прототипе.
0 Все это способствует повышению урс жайности возделываемых культур, повышг нию экологической безопасности и получению экологически чистой продукции сельскохозяйственного производства.
5
Формула изобретения Устройство для контроля и управления расходом рабочей жидкости в штанговых опрыскивателях, содержащее блок управле0 ния, включающий в себя микропроцессор, к входу которого подключена схема начальной установки, а выходы связаны с буфером адреса и схемой формирования управляющих сигналов, блок постоянной памяти,
5 блок оперативной памяти, блок клавиатуры с контроллером клавиатуры, блок индикации с контроллером индикатора, динамическую головку с контроллером, дешифратор устройств, порт ввода-вывода информации
0 и программируемый таймер, связанные между собой по системной магистрали открытого типа, причем вход порта ввода-вывода информации подключен к позиционному датчику включения силового
5 привода насоса, сообщающегося всасывающим патрубком с баком с рабочей жидкостью, а напорная магистраль насоса имеет установленный в ней датчик общего расхода рабочей жидкости со встроенным формирователем импульсов и соединяется со штангой с распылителями и с переливной магистралью, сообщающейся с баком с рабочей жидкостью, установленным на опорные колеса, на одном из которых укреплен датчик скорости движения агрегата со встроенным в нем формирователем импульсов, причем в переливной магистрали установлен регулируемый перепускной клапан, соединенный с электродвигателем, который через усилитель мощности электрически связан с выходом порта ввода-вывода информации микропроцессорного блока управления, о т- личающееся тем, что, с целью повышения функциональных возможностей устройства, улучшения условий труда механизатора, повышения равномерности
0
5
распределения рабочей жидкости по поверхности обрабатываемого поля в пределах заданного агротехнического допуска, повышения экологической безопасности штанговых опрыскивателей, устройство снабжено датчиком расхода рабочей жидкости через один распылитель со встроенным в нем формирователем импульсов, установленным в штанге опрыскивателя между последним и предпоследним распылителями и электрически связанным с одним из входов программируемого таймера микропроцессорного блока управления, два других входа которого подключены к выходам датчика общего расхода рабочей жидкости и датчика скорости движения агрегата.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ РАБОЧЕЙ ЖИДКОСТИ В ШТАНГОВЫХ ОПРЫСКИВАТЕЛЯХ | 1991 |
|
RU2020818C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАСХОДОМ РАБОЧЕЙ ЖИДКОСТИ ПОЛЕВЫМИ ОПРЫСКИВАТЕЛЯМИ С КОРРЕКЦИЕЙ НА КОНЦЕНТРАЦИЮ РАСТВОРА | 1992 |
|
RU2048098C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАСХОДОМ КЛУБНЕЙ КАРТОФЕЛЕПОСАДОЧНОЙ МАШИНЫ | 1991 |
|
RU2034430C1 |
| АГРЕГАТ МАЛООБЪЕМНОГО ОПРЫСКИВАНИЯ "ИРТЫШАНКА" | 2002 |
|
RU2231259C2 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН ПНЕВМАТИЧЕСКОЙ СЕЯЛКОЙ | 1992 |
|
RU2043006C1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ, КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН И МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 1992 |
|
RU2043007C1 |
| ОПРЫСКИВАТЕЛЬ | 2008 |
|
RU2367154C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ КАЧЕСТВОМ ОБРАБОТКИ ПОЧВЫ ФРЕЗОЙ | 1995 |
|
RU2088062C1 |
| ОПРЫСКИВАТЕЛЬ ДЛЯ ОБРАБОТКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР ЭЛЕКТРОАКТИВИРОВАННОЙ ВОДОЙ | 2011 |
|
RU2485773C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПЫЛЕННОСТИ ВОЗДУХА | 1998 |
|
RU2147739C1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к машинам для химической защиты растений. Цель изобретения - повышение функциональных возможностей устройства, улучшение условий труда механизатора, повышение равномерности распределения рабочей жидкости по поверхности обрабатываемого поля в пределах заданного агро- тахнического допуска и повышение экологической безопасности штанговых опрыскивателей. Устройство включает установку двух датчиков 22 и 24 расхода рабочей жидкости: общего расхода в напорной магистрали 21 опрыскивателя и расхода жидкости через один распылитель в штанге 23 между последним и предпоследним распылителями 25, подключения электрических выходов датчиков к входам программируемого таймера, работающего в режиме счетчика показателя вероятности нахождения контролируемого параметра в поле заданного агротехнического допуска, учитывающей случайный характер процессов. 1 ил. сл С
| Галюс А.В., Ямников Ю.Н | |||
| Автоматический контрочь и управление в машинах для внесения жидких удобрений и пестицидов | |||
| Автоматический контроль и сигнализация в сельскохозяйственных машинах | |||
| Сб | |||
| научных трудов ВИСХОМ | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
