Изобретение относится к строительству и связано со строительством сейсмостойких зданий или сооружений.
Известны сейсмоизолирующие устройства зданий, сооружений, использующие кинематические опоры (связи) и скользящие пояса (опоры), в которых фундамент и надфундаментная часть соединены шарнирными элементами.
Недостатком таких устройств является отсутствие систем, восстанавливающих положение сооружения после сейсмовоздействия.
Наиболее близким к предлагаемому устройству является связь, используемая в сейсмостойком здании, сооружении, включающая надфундаментную часть и фундамент, на выступе которого установлена кинематическая опора, состоящая из стойки с шарнирами по концам и с жестко прикрепленными к ее боковой поверхности крестообразно размещенными в плане рычагами, причем каждый рычаг снабжен шарнирно прикрепленной к его свободному концу траверсой с подвешенными на одном ее конце уравновешивающей массой и реактивной силовой установкой, а на другом грузом, при этом фундамент выполнен с упорами под траверсы, а реактивные силовые установки через систему запуска и устройство управления подключены к инерционному датчику ускорений.
Недостатком рассмотренного устройства являются ограниченные возможности защиты сооружения при широком спектре частот сейсмического воздействия.
Целью изобретения является повышение эффективности защиты зданий или сооружений при случайном сейсмическом воздействии.
Поставленная цель достигается тем, что в кинематической опоре сейсмостойкого здания или сооружения, расположенной в зазоре между их фундаментом и надфундаментной частью и включающей опорный элемент, стойку, соединенную с последним и надфундаментной частью шарнирами, и крестообразно размещенные в плане рычаги, один конец которых жестко прикреплен к боковой поверхности стойки, а другой конец размещен за пределами опорного элемента и шарнирно соединен с траверсой, на одном конце которой подвешен груз, взаимодействующий с упорами, а на другом уравновешивающая масса и соответствующая силовая установка, подключенные через устройство управления к датчикам перемещения и двухкоординатному инерционному датчику ускорения, надфундаментная часть оперта на опорный элемент через антифрикционную прокладку, а опорный элемент выполнен с полостью, в которой размещена стойка, и с отверстиями, через которые пропущены рычаги, причем каждая силовая установка выполнена в виде электромагнитного привода с фрикционным тормозом и соединена нижней частью с фундаментом, а датчики перемещения соединены с опорным элементом посредством механических связей.
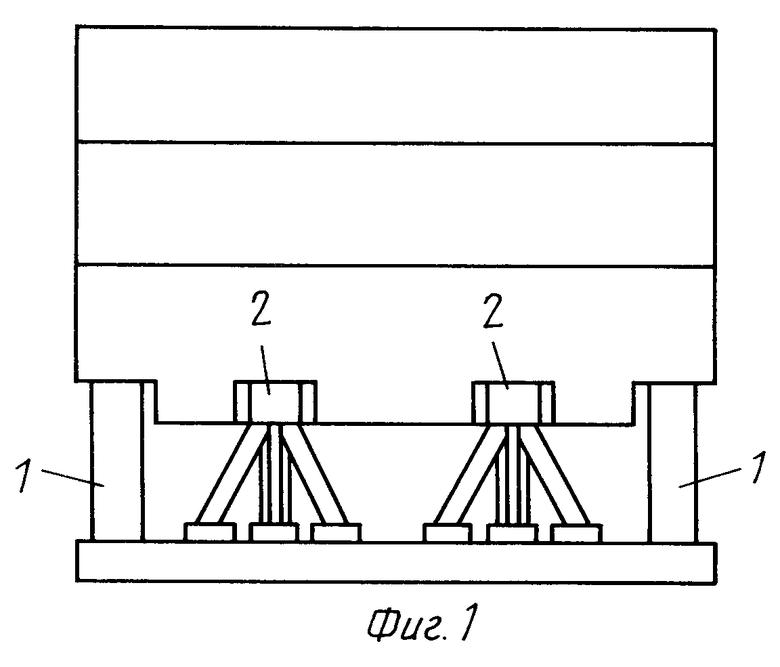
На фиг.1 изображено здание, в котором используются скользящие опоры 1 и предлагаемая кинематическая опора 2; на фиг.2 представлен чертеж опоры; на фиг. 3 чертеж силовой установки; на фиг.4 схема расположения датчиков; на фиг.5 структурная схема управляющей системы.
Кинематическая опора (фиг.2), соединяющая фундамент 1 и надфундаментную часть сооружения 2, содержит опорный элемент 3, нижняя часть которого скреплена с фундаментом, а на верхнюю, выполненную в виде усеченного конуса, опирается надфундаментная часть здания через антифрикционную прокладку 4. Верхняя часть опоры размещена в углублении надфундаментной части 2 конической формы с зазором. В опорном элементе размещена стойка 5, которая нижним шарниром 6 опирается на опорный элемент, а верхним подвижным по вертикали шарниром 7 соединяется с надфундаментной частью. Четыре рычага 8, установленные крестообразно и жестко прикрепленные к боковым поверхностям стойки 5, через отверстия в опорном элементе выходят за ее пределы. К траверсам 9 шарнирно соединенных со свободными концами рычагов 8 прикреплены грузы 10 и уравновешивающие массы 11, связанные со штоком электромагнитного привода 12 и с тормозом 13. Траверсы опираются на упоры 14. Для контроля за перемещениями надфундаментной части 2 относительно опоры 3 установлены датчики перемещения 15, связанные с опорой механическими связями. Для измерения ускорений конструкций, скорости перемещения и инерционных сил установлен двухкоординатный инерционный датчик ускорения 16.
Силовая установка кинематической опоры сейсмостойкого здания может быть выполнена в виде конструкции, приведенной на фиг.3. Она содержит катушку силового электромагнита 17, якорь со штоком 18, фрикционный тормоз, состоящий из подпружиненных полуколец 19, прижимаемых к штоку эксцентрично установленными кулачками 20, вращаемыми от электромагнитов 21 через тяги 22.
Датчики (фиг.4) перемещения 15 установлены над соответствующими рычагами и определяют перемещение надфундаментной части здания относительно опоры в прямоугольной системе координат. Датчик ускорения 16 выдает информацию о ускорении элементов здания во взаимно перпендикулярных направлениях в прямоугольной системе координат с соответствующими знаками.
Управляющая система (фиг.5) состоит из датчиков перемещения 15 инерционного датчика ускорения 16, контроллера, состоящего из микропроцессора 23 и запоминающего устройства 24, устройства ввода программ и пороговых значений параметров 25, пульта управления 26 формирователя тока силовых электромагнитов 27, силовых электромагнитов 17, электромагнитов фрикционных тормозов 21, источника электроэнергии 28.
Датчики к контроллеру подключаются через устройства сопряжения с объектом управления 29, представляющие собой амплитудно-цифровой преобразователь, а электромагниты через кодово-аналоговый преобразователь 30. Все устройства сопряжения с объектом к контроллеру подключаются через интерфейсную магистраль 31.
Возможна установка датчиков ускорения 32 вне сооружения и подключения их через телеканал 33.
Функционирует предлагаемое устройство следующим образом.
При слабых горизонтальных колебаниях основания внешняя возмущающая сила, действующая на надфундаментную часть, не превышает сил трения между надфундаментной частью и фундаментом, в результате чего здание работает как обычно.
При превышении медленно меняющейся нагрузки с внешней стороны заданного значения, равного силе трения, происходит проскальзывание массы надфундаментной части относительно фундамента с передачей горизонтальных сил на стойку 5 кинематической связи. При наклоне стойки 5 рычаги 8 приводят в движение грузы 10 с изменением начальной высоты их над поверхностью фундамента, что выводит кинематическую связь из равновесия и приводит к возникновению восстанавливающей силы, приложенной к верхнему шарниру 7 и направленной встречно внешнему возмущающему воздействию. При качении стойки 5 с рычагами 8 центры тяжести грузов 10 перемещаются, при этом плечо поднимаемого груза уменьшается, что ведет к увеличению восстанавливающего момента.
При значительных медленных перемещениях грунта грузы 10 упираются в поверхность фундамента. При этом прекращается влияние противовесов и увеличивается восстанавливающий момент.
При ударных быстросменяющихся нагрузках в работу включается инерционный датчик 16. При достижении ускорения заданного предела, записанного в запоминающее устройство 24 контроллера микропроцессора 23, вырабатываются команды на включение силовых электромагнитов. Команды, представленные кодовыми словами, преобразуются в аналоговый сигнал кодово-аналоговым преобразователем 30. В зависимости от направления и величины ускорения формируется требуемая форма тока формирователя 27, и по информации с датчиков перемещений 15 и заданной программе управления определяются электромагниты 17, которые необходимо включить для создания восстанавливающей силы, направленной навстречу внешнему воздействию. Включение силовых электромагнитов приводит к опусканию грузов 10 на фундамент, чем создается восстанавливающий момент до появления больших смещений конструкции сооружения. Силовая электромагнитная установка может создавать дополнительный восстанавливающий момент при удлиненном ходе штока 18 силового электромагнита.
Кинематические связи могут использоваться в чистом виде только в тех местностях, где может быть спрогнозирован характер сейсмических воздействий.
При случайных воздействиях должны использоваться комбинированные связи. Подобными свойствами обладает предлагаемая опора.
При включении электромагнитов 21 фрикционных тормозов и включении обмотки 17 штоки силовых электромагнитов 18 фиксируются, образуя дополнительный жесткий пояс опоры, проявляя свойства "включающейся опоры", которая в любой момент может быть выключена, проявляя свойства "выключающейся опоры".
Для повышения быстродействия системы управления возможно использование информации от внешних датчиков ускорения 32, подключаемых через телеканал 33.
При использовании реверсивного электропривода 17 возможности опоры увеличиваются. Для этого обмотка 17 выполняется из двух секций, а формирователь тока электромагнитов 27 должен формировать разнополярные сигналы.
В общем случае инерционные силы и смещение конструкций измеряется датчиками ускорения 16 и перемещения 15, которые через механические связи воспринимают перемещения. По величине перемещения, направлению перемещения, скорости перемещения, величине и направлению внешней силы управляющая система формирует управляющие сигналы на электромагнитные приводы, чем обеспечивается включение-выключение опоры или создание восстанавливающего момента требуемой величины и направления с заданными параметрами переходного режима.
Конусообразная верхняя часть опоры 3 при смешении конструкций сооружения ограничивает их горизонтальные и вертикальные перемещения и вызывает силовые реакции, совпадающие с восстанавливающим усилием.
Торможение выведенной из равновесия части сооружения при использовании предлагаемой опоры может производиться по любому заданному алгоритму. Программа управления с заданными значениями предельных величин вводится в запоминающее устройство 24 с пульта управления 26 через устройство ввода 25, которые могут быть переносными и использоваться для обслуживания многих опор.
Предлагаемая опора одновременно реализует принцип скользящей опоры, включающей и выключающей опоры и кинематической опоры с формированием восстанавливающего момента.
Предлагаемая опора соответствует критерию "новизна". Сравнение предлагаемого решения не только с прототипом, но и с другими аналогами в данной области техники не выявило в них признаков, составляющих сущность предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмостойкое здание, сооружение | 1989 |
|
SU1735495A1 |
| Сейсмостойкое здание, сооружение | 1989 |
|
SU1735496A1 |
| СЕЙСМОСТОЙКОЕ ЗДАНИЕ, СООРУЖЕНИЕ | 1994 |
|
RU2087622C1 |
| Сейсмостойкое здание,сооружение | 1986 |
|
SU1379435A1 |
| Связь сейсмостойкого здания или сооружения | 1990 |
|
SU1761929A1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ ПРИ КРАТКОВРЕМЕННОМ ДИНАМИЧЕСКОМ ВОЗДЕЙСТВИИ | 2010 |
|
RU2428549C1 |
| Фундамент сейсмостойкого здания,сооружения | 1983 |
|
SU1157199A1 |
| ФУНДАМЕНТ СЕЙСМОСТОЙКОГО ЗДАНИЯ НА КОЛОННАДЕ, РАСПОЛОЖЕННОЙ В ПОДВАЛЬНОМ ЭТАЖЕ | 2001 |
|
RU2188907C1 |
| УСТРОЙСТВО ДЛЯ СЕЙСМОИЗОЛЯЦИИ СООРУЖЕНИЯ | 1991 |
|
RU2024689C1 |
| СЕЙСМОСТОЙКОЕ ЗДАНИЕ | 2007 |
|
RU2340751C1 |




Использование: строительство сеймостойких зданий или сооружений с кинематическими опорами. Сущность изобретения: опорные элементы с антифрикционной прокладкой размещенные в зазоре между надфундаментной частью и фундаментом. В зазоре между надфундаментной частью и фундаментом расположены опорные элементы связи с антифрикционной прокладкой между ними и стойка. Последняя размещена внутри опорного элемента и связана с надфундаментной частью и фундаментом шарнирами, расположенными по ее концам. К боковым поверхностям стойки жестко прикреплены крестообразно размещенные в плане рычаги, свободные концы которых выходят через отверстия в опорном элементе за его пределы. Каждый рычаг шарнирно связан с траверсой, на одном конце которой подвешан груз, а на другом уравновешивающая масса и силовая установка. В качестве последней использован электромагнитный привод с фрикционными тормозами. Все электромагниты силовой установки подключены через устройство управления к датчикам перемещения и ускорения. 1 з. п. ф-лы, 5 ил.
| Сейсмостойкое здание, сооружение | 1989 |
|
SU1735495A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
