Изобретение относится к устройствам позиционирования, а именно прецизионному устройству перемешения, и может найти применение в микроскопии, литографии, интерферометрии, оптоэлектронике, микромеханике, биологии клетки. Преимущественно изобретение может быть использовано в растровых туннельных микроскопах.
Известно пьезоэлектрическое устройство перемешения в виде столика Т-образной формы из пьезокерамики с электростатическими опорами. Последовательная подача импульсов напряжения на опоры и пьезокерамические элементы столика позволяет реализовать двухкоординатное перемещение.
Недостатками известного устройства являются низкая разрешающая способность и точность перемещения, сложность технологии изготовления и сложность алгоритма управления перемешением. Низкая разрешающая способность обусловлена большой силой трения покоя. Действительно при заданной скорости изменения напряжения на пьезокерамике в фазе скольжения (которая не может превышать некоторого значения, определяемого электрическими и механическими параметрами системы) значение порогового напряжения, при котором происходит разрыв микроскопических связей соприкасающихся поверхностей при переходе ножек из состояния покоя к скольжению, определяется величиной силы трения покоя. Таким образом, минимальная величина шага, определяющая разрешающую способность устройства, не может быть ниже значения, равного произведению порогового напряжения на соответствующую пьезоэлектрическую постоянную, и определена, в конечном счете, величиной силы трения покоя опор о поверхность столика. Низкая точность перемещения обусловлена, во-первых, большой площадью соприкосновения ножек, в результате чего трудно осуществить равномерный прижим их по всей поверхности трущихся, и, следовательно, одинаковую силу трения во время перемещения столика по направляющим. Во-вторых, возможным отклонением плоскостей ножек от параллельности в процессе их изготовления, в результате чего эффективность прижатия ножек может оказаться непостоянной при приложении напряжения, и ножки могут проскальзывать в процессе перемещения столика. Еще одна причина низкой точности перемещения связана с геометрией столика, обуславливающей неравномерность прижима ножек к основанию из-за неравномерности распределения масс, в результате чего столик в процессе перемещения вдоль одной из кординат может смещаться в боковом направлении, что может вызвать, в свою очередь, дополнительный разброс величины шага.
Известны также пьезоэлектрические устройства перемещения, основанные на инерционном принципе, в которых к пьезоэлементам прикладывается пилообразное напряжение с отличающимися скоростями нарастания и спада. Когда скорость изменения нарастания мала, одновременно с деформацией пьезоэлемента происходит смещение объекта (столика). При большой скорости изменения напряжения из-за инерции перемещаемого объекта происходит относительное проскальзывание пьезоэлемента с опорами и перемещаемого объекта.
Недостатками известного устройства являются низкая разрешающая способность и точность перемещения, сложность изготовления и отсутствие возможности перемещения столика по двум координатам без усложнения конструкции устройства. Низкая разрешающая способность обусловлена большой силой трения покоя опор о поверхность, а низкая точность технологическими разбросами пьезоэлектрической константы материала, в результате чего отклонение каждой из опор от положения равновесия также имеет разброс как по величине, так и по направлению перемещения.
Наиболее близким к заявленному является пьезоэлектрическое устройство перемещения, применяемое в растровом туннельном микроскопе для перемещения образца по двум координатам. Это известное устройство содержит основание, на котором одним концом закрепляются пьезоэлектрические трубки, по меньшей мере один из внешних электродов которых разделен на четыре идентичных части для осуществления изгиба трубок в разных направлениях. Три пьезоэлектрических трубки размещены в вершинах равностороннего треугольника и снабжены сферическими опорами, имеющими точечный контакт с горизонтально расположенным на них столиком. Перемещение столика осуществляется одновременным изгибом трех трубчатых пьезоэлементов под действием пилообразного напряжения.
Перемещение с помощью трех пьезоэлементов обуславливает недостаточную точность и разрешающую способность известного устройства. Такая низкая точность обусловлена тем, что параметры пьезоэлементов (геометрические размеры, площади электродов, величины пьезоэлектрических констант) имеют технологический разброс и, следовательно, характер движения не является полностью идентичным. В результате отклонение каждой из опор от первоначального положения также имеет разброс как по величине, так и по направлению перемещения. Недостаточная разрешающая способность связана с большой силой трения опор о поверхность столика.
Целью изобретения является повышение точности и разрешающей способности устройства.
На чертеже изображено предлагаемое устройство.
Устройство содержит основание 1, на верхней части которого установлены три полусферические прецизионные опоры 2, лежащие в вершинах треугольника, лучше всего равностороннего. На нижней части основания расположен преобразователь 3, выполненный в виде трубки. Нижний конец трубки закреплен на нижней части основания 1, в результате чего трубка оказывается закрепленной консольно. На боковых цилиндрических поверхностях трубки нанесены электроды. Причем по меньшей мере один электрод 4 разделен на четыре идентичных части для обеспечения перемещения по двум координатам. Верхняя поверхность горизонтально расположенного столика 5 опирается на три опоры 2, а нижняя поверхность столика 5 на полусферическую опору 6, закрепленную на свободном конце преобразователя 3 и расположенную в центре тяжести треугольника, в вершинах которого лежат опоры 2.
Устройство работает следующим образом.
Для перемещения столика 5 напряжение пилообразной формы прикладывается к одной из частей электрода 4 и внутренним электродам либо пилообразное напряжение разной полярности прикладывается к противолежащим частям электрода 4. Причем скорость нарастания напряжения большая, а спада низкая. При подаче нарастающего напряжения на электроды преобразователя 3 он изгибается и происходит боковое и одновременно вертикальное смещение опор 6 относительно столика 5. При достаточно быстром нарастании напряжения силы трения покоя при смещении опор 6 относительно столика 5 определяются лишь силами, необходимыми для разрыва микроскопических связей пар трения, а силы, необходимые для образования частично обратимых перемещений в зоне контакта при обычном переходе тела из состояния покоя скольжению по поверхности, фактически уменьшаются до нуля, т. е. столик как бы зависает над опорой вследствие силы инерции, действующей на него. Таким образом, приложенные к опоре силы характеризуются более низким критическим значением и определяют более низкое значение порогового напряжения и, следовательно, меньшую величину шага. При спаде напряжения, имеющем относительно низкое значение, или при относительно медленном спаде напряжения силы трения покоя о поверхность столика 5 возрастают вследствие того, что на опору 6 действуют дополнительные силы, обусловленные силой инерции, действующей на столик 5 при подъеме его опорой 6 в исходное горизонтальное положение и одновременном перемещении на один шаг.
Последовательная подача импульсов пилообразного напряжения на электроды пьезопреобразователя 3 приводит к перемещению столика 5 на требуемое расстояние. Для перемещения столика 5 по другой координате напряжение подается на другие части электрода 4, разнесенные по окружности на 90о относительно первых. Как показали экспериментальные исследования, устройство обладает наилучшей разрешающей способностью при соотношении диаметра преобразователя 3 к его высоте, находящемся в диапазоне от 1:2 до 1:5. В качестве пьезопреобразователя может быть также использована биморфная пластина, что обеспечит более низкие рабочие напряжения, однако при этом реализуется однокоординатное перемещение столика.
Использование предлагаемого изобретения в сравнении с известными обеспечит более высокую точность перемещения столика и разрешающую способность. Указанное преимущество устройства особенно ценно при использовании его в растровых туннельных микроскопах, применяемых в технологии нанесения субмикронных линий на образец (что уже находит применение для реализации возможности сверхплотной записи информации), а также при исследованиях различных участков протяженных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ПЕРЕМЕЩЕНИЯ | 1992 |
|
RU2045126C1 |
| СПОСОБ РЕГИСТРАЦИИ РЕЛЬЕФА ПОВЕРХНОСТИ ОБРАЗЦА РАСТРОВЫМИ ТУННЕЛЬНЫМИ МИКРОСКОПАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020405C1 |
| СПОСОБ МАГНИТНОЙ ЗАПИСИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2023315C1 |
| МИКРОМАНИПУЛЯТОР ДЛЯ ПОЗИЦИОНИРОВАНИЯ ЗОНДА | 1992 |
|
RU2056666C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2247467C1 |
| Измерительное пьезоэлектрическое устройство | 1989 |
|
SU1682776A1 |
| ПРЕОБРАЗОВАТЕЛЬ ТРЕХФАЗНОГО ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2012 |
|
RU2487457C1 |
| Устройство для перемещения ленточного носителя информации | 1978 |
|
SU949708A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР ДЛЯ ТУННЕЛЬНОГО МИКРОСКОПА | 1993 |
|
RU2061295C1 |
| УСТРОЙСТВО МИКРОПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2272350C1 |
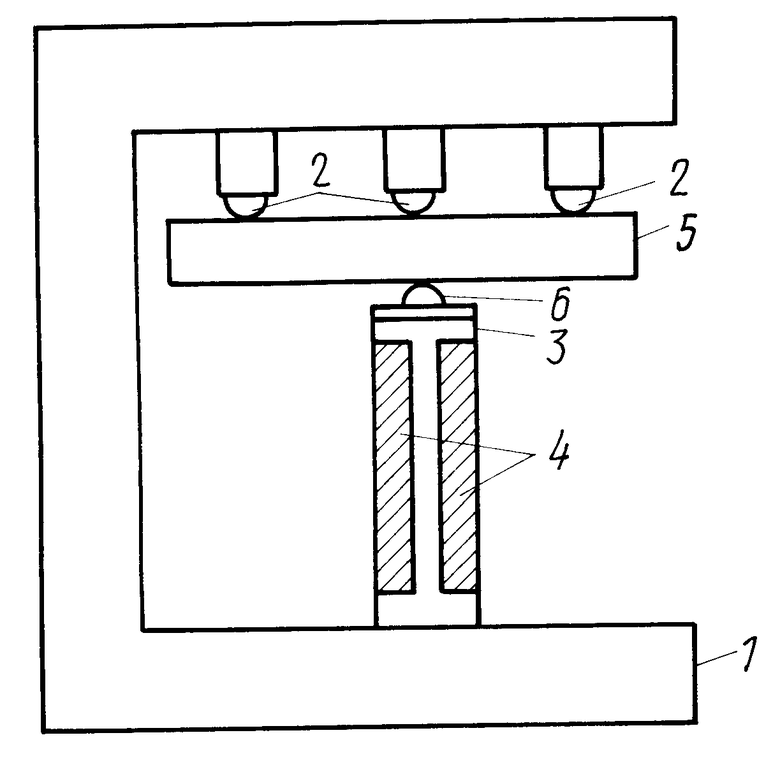
Использование: микроскопии, литографии, интерферометрии, микромеханике, биологии клетки для прецизионного позицинирования. Этот привод имеет расположенные в вершинах треугольника верхние опоры, взаимодействующие с верхней поверхностью столика для его прижатия к единственной нижней опоре, установленной на конце пьезокерамического преобразователя электрических сигналов в изгибные деформации. При изгибе преобразователя происходит перемещение столика. Нижняя опора центрирована относительно центра тяжести треугольника, образованного тремя верхними опорами. 1 з. п. ф-лы, 1 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
