Устройство относится к области научного приборостроения и предназначено для использования в устройствах микро- и наноскопических перемещений, Оно может применяться, в частности, в сканирующих зондовых микроскопах и нанотехнологических установках для перемещения образца.
Известно пьезоэлектрическое устройство инерционного перемещения объекта (А.С. 1616490, Н 02 N 2/00, Н 01 L 41/09. Пьезоэлектрическое устройство инерционного перемещения объекта. А.О.Голубок, Д.Н.Давыдов, В.А.Тимофеев, С.Я.Типисев). Устройство состоит из пьезопластины, которая соединена с опорой, расположенной на основании. Опора и основание образуют кинематическую пару трения. Для перемещения объекта на электроды пластины подается несимметричное пилообразное напряжение, пологий фронт которого сопровождается медленным перемещением центра масс пьезопластины. При формировании крутого среза пилообразного сигнала происходит быстрое перемещение центра масс пьезопластины, в результате которого действующая на опору сила превышает силу трения, вызывая перемещение опоры. Недостатком устройства является то, что сила трения между основанием и опорой обусловлена силой тяжести, а это не позволяет перемещать объект по вертикально расположенной плоскости.
Известно устройство для микроперемещений (А.С. 1537088, Н 01 L 41/08, Н 02 N 11/00. Устройство для микроперемещений объекта. Д.Г.Волгунов, А.А.Гудков, В.Л.Миронов). Устройство содержит пьезотрубку, закрепленную одним концом на основании. На другом конце трубки установлена опора, к которой посредством пружин прижата державка патрона. В патроне также посредством пружин установлен держатель объекта. Таким образом, кинематические пары (опора - державка, патрон - держатель объекта) устройства образуются за счет сил упругой деформации пружин, что позволяет использовать устройство в любой пространственной ориентации и перемещать объект по трем некомпланарным осям. Для перемещения объекта на электроды трубки подается несимметричное пилообразное напряжение, пологий фронт которого сопровождается синхронным перемещением объектов в кинематической паре, а крутой срез - проскальзыванием. Недостатком данного устройства является негативное влияние силы трения на точность позиционирования при формировании среза пилообразного сигнала. Это влияние обусловлено следующим. При формировании фронта пилообразного напряжения деформацию пьезоэлемента и, соответственно, величину перемещения объекта можно контролировать за счет того, что конец пьезотрубки, пружины и держатель объекта движутся синхронно. При формировании среза пилообразного сигнала в кинематических парах устройства происходит проскальзывание державки с патроном относительно опоры либо держателя объекта относительно патрона. Во время проскальзывания на перемещаемые объекты действует сила трения, которая приводит к их неконтролируемому смещению из точки, достигнутой в результате формирования фронта. Это снижает точность позиционирования объекта и является недостатком устройства.
Наиболее близким к заявляемому является устройство (Патент РФ №2205474, МПК 7 H 01 L 41/09. Устройство микроперемещений. Липанов А.М., Гуляев П.В., Шелковников Е.Ю. и др.), содержащее основание, в котором заделана одним концом пьезоэлектрическая трубка. На другом конце трубки закреплены державка и цанговая пружина. Перемещаемый объект располагается на держателе, образующем с пружиной кинематическую пару трения. Внутри пьезотрубки трубки установлены магнит и магнитопроводы, сосредотачивающие его поле в цилиндрическом зазоре. В зазоре располагается держатель и жестко связанная с ним катушка. Управление током в катушке позволяет осуществлять электродинамическое воздействие на держатель объекта и компенсировать, таким образом, негативное воздействие силы трения на точность позиционирования. Недостатком данного устройства является то, что оно позволяет позиционировать объект только вдоль одной оси.
Задачей изобретения являются повышение точности двухкоординатного позиционирования объекта (образца, инструмента) при любой ориентации устройства микроперемещений в пространстве.
Задача решается тем, что в устройстве помимо пьезоэлектрического элемента (пьезотрубки), являющегося основным источником инерционных перемещений объекта в кинематической паре трения, имеется вспомогательный электродинамический источник, который позволяет осуществлять воздействие на объект в любом направлении, лежащем в плоскости позиционирования. Применение электродинамического воздействия для компенсации негативного действия силы трения позволяет повысить точность микроперемещений объекта.
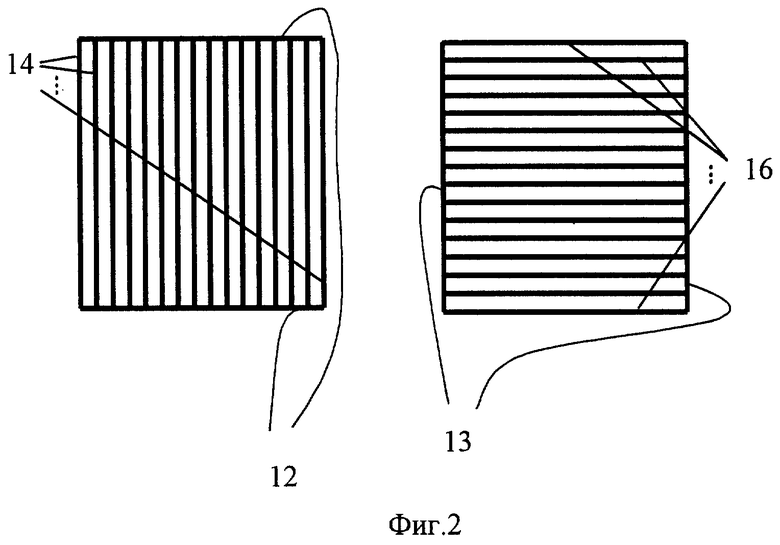
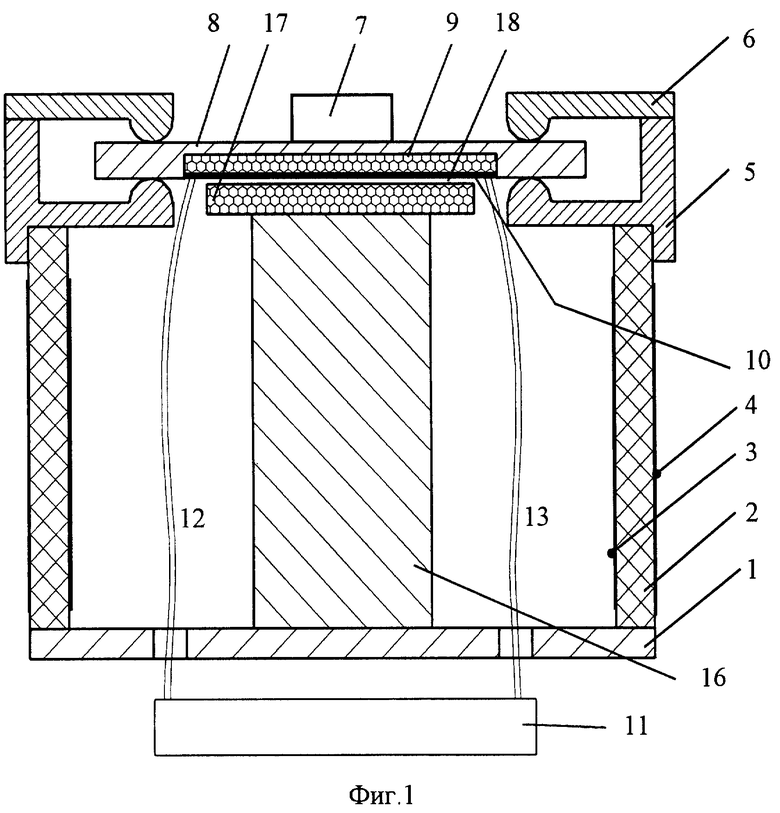
На фиг.1 представлено заявляемое устройство в разрезе, на фиг.2 - топология и подключение каждой из двух сторон печатной платы.
Устройство содержит основание 1 (фиг.1), в котором заделана одним концом пьезотрубка 2 с одним сплошным внутренним 3 и четырьмя внешними 4 электродами. На другом конце пьезотрубки 2 закреплена опора 5 с прижимной пружиной 6. Перемещаемый объект 7 прикреплен к подвижному дискообразному столику 8, прижатому к опоре 5 с помощью пружины 6. Внутри столика расположены первый магнит 9 и печатная плата 10, соединенная с устройством управления 11 двумя парами гибких проводников 12 и 13. Плата 10 имеет две группы 14, 15 параллельных дорожек (фиг.2), по одной группе на сторону. Концы дорожек объединены и подключены к устройству управления 11 посредством проводников 12, 13. Внутри трубки 2 расположен держатель 16, жестко связанный одним концом с основанием 1. На другом конце держателя закреплен второй магнит 17. Магнитное поле, действующее между магнитами, сосредоточено в магнитном зазоре 18.
Устройство работает следующим образом. Для осуществления перемещений на пьезотрубку 2 подается несимметричный пилообразный сигнал.
Под воздействием пологого фронта этого сигнала пьезотрубка 2 подвергается деформации изгиба, перемещая опору 5 и пружину 6. Скорость движения элементов 5 и 6 при этом невысокая, поэтому сила трения перемещает столик 8 и объект 7 синхронно с элементами 5 и 6. Под воздействием крутого среза пилообразного сигнала пьезотрубка 2 возвращается в недеформированное состояние, при этом конец пьезотрубки 2, опора 5 и пружина 6 перемещаются с большим ускорением. Сила трения, действующая на столик 8, не может придать ему и объекту 7 такое же ускорение, поэтому они проскальзывают относительно опоры 5 и пружины 6. В результате величина, на которую сила трения перемещает столик 8 при формировании среза, меньше перемещения опоры 5 и пружины 6, что при воздействии серии пилообразных импульсов позволяет перемещать столик 8 и объект 7 на расстояния, значительно превышающие деформацию пьезотрубки 2. Таким образом, при формировании фронта пилообразного сигнала действие силы трения является полезным, поскольку она позволяет перемещать столик 8 синхронно с опорой 5 и пружиной 6 и контролировать за счет этого его положение. При формировании среза пилообразного сигнала сила трения оказывает негативное воздействие, поскольку приводит к неконтролируемому смещению столика 8 из положения, достигнутого в результате формирования фронта пилообразного сигнала. С целью компенсации негативного действия силы трения в устройство введены два постоянных магнита 9 и 17, печатная плата 10 с проводниками 12, 13 и держатель 16. Один из магнитов 9 вмонтирован в столик, другой магнит 17 расположен на держателе 16 таким образом, что магниты располагаются параллельно друг другу, а между ними имеется зазор 18. При этом противоположные полюса магнитов 9 и 17 обращены друг к другу, в результате чего в зазоре 18 создается однородное магнитное поле. Печатная плата 10, расположенная в этом зазоре, покрыта изолирующим слоем и жестко соединена (например, склеена) с первым магнитом 9. На каждой стороне печатной платы 10 размещена группа геометрически параллельных дорожек (фиг.2). Дорожки, помимо всего прочего, являются еще и электрически параллельно соединенными проводниками, у которых концы соединены с устройством управления двумя парами гибких проводников 12, 13. При этом дорожки на разных сторонах платы 10 взаимно перпендикулярны. При протекании тока через эти дорожки на них, а также на плату 10 и столик 8 согласно закону Ампера действует сила, направление которой определяется по правилу левой руки. Вектора сил, действующих на каждую группу дорожек, взаимно перпендикулярны и лежат в плоскости перемещений столика. За счет управления током в каждой группе дорожек можно управлять величиной и направлением равнодействующей сил, приложенных к первой и второй группе дорожек. Если вектор этой равнодействующей противоположен силе трения, то это позволяет компенсировать ее негативное действие при формировании среза пилообразного сигнала и увеличивать точность позиционирования объекта 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2257645C1 |
| УСТРОЙСТВО МИКРОПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2272350C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2008 |
|
RU2359364C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2005 |
|
RU2284642C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2001 |
|
RU2205474C1 |
| СПОСОБ РЕАЛИЗАЦИИ ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2011 |
|
RU2457608C1 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2002 |
|
RU2218629C2 |
| МИКРОМАНИПУЛЯТОР ДЛЯ ПОЗИЦИОНИРОВАНИЯ ЗОНДА | 1992 |
|
RU2056666C1 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2012 |
|
RU2491459C1 |
Использование: в сканирующих зондовых микроскопах и нанотехнологических установках. Сущность: устройство содержит основание, в котором закреплена пьезотрубка с электродами. На другом конце трубки установлена опора, к которой пружиной прижат столик с размещенным на нем перемещаемым объектом. Внутри столика вмонтирован первый магнит. Второй магнит, соединенный с основанием посредством держателя, расположен внутри пьезотрубки параллельно первому магниту и обращен к нему противоположным полюсом. В зазоре между магнитами расположена печатная плата, которая соединена с первым магнитом. Плата на каждой стороне имеет группу параллельных дорожек. Дорожки в разных группах взаимно перпендикулярны, а их концы в каждой группе объединены и подключены к устройству управления. Технический результат: возможность электродинамического воздействия на столик и повышение точности позиционирования объекта. 2 ил.
Устройство для микроперемещений объекта, содержащее основание, пьезотрубку с электродами, один конец которой укреплен на основании, а другой снабжен опорой и пружиной, прижимающей столик с размещенным на нем объектом перемещений к опоре, держатель, первый магнит, размещенный внутри пьезотрубки, и устройство управления, отличающееся тем, что в него введены печатная плата и второй магнит, при этом первый магнит соединен с основанием, второй магнит соединен со столиком, магниты обращены друг к другу противоположными полюсами и разделены магнитным зазором, печатная плата жестко соединена со вторым магнитом, размещена в магнитном зазоре и имеет на каждой стороне группу параллельных дорожек, причем дорожки на разных сторонах платы взаимно перпендикулярны, а концы дорожек в группе соединены между собой и подключены к устройству управления.
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2001 |
|
RU2205474C1 |
| Сканирующий туннельный микроскоп | 1989 |
|
SU1698914A1 |
| US 6178813 А, 30.01.2001 | |||
| US 5835251 А, 10.11.1998. | |||

