Изобретение относится к гидромашиностроению и может быть использовано в системах управления поворотно-лопастных турбин с управляемым направляющим аппаратом.
Известен способ обнаружения неисправности в работе электрогидравлического регулятора поворотно-лопастной гидротурбины, по которому контролируют выполнение управляющих воздействий и подают сигнал об обнаружении неисправности [1]
Недостатком этого способа являетcя недоcтаточная точноcть, так как не оцениваетcя качеcтво работы электрогидравличеcкого регулятора.
Извеcтен также cпоcоб обнаружения неисправности в работе электрогидравлического регулятора поворотно-лопастной гидротурбины, по которому контролируют рассогласование между фактической величиной хода сервомотора, осуществляющего разворот лопастей рабочего колеса, и величиной управляющего воздействия, определяя наличие основного признака неисправности в виде отклонения контролируемой величины рассогласования в сторону превышения от его заданного максимально допустимого значения, и по-дают сигнал об обнаружении неисправности [2]
Недостатком этого способа является ограниченность диапазона его эффективной работы только установившимися режимами работы.
При установившихся режимах регулирования такой способ обеспечивает эффективное текущее выявление неисправности, так как при неизбежном рассогласовании, обусловленном различной инерционностью отработки положения направляющим аппаратом и связанной с ним комбинаторной зависимостью степенью разворота лопастей рабочего колеса, это рассогласование не должно превышать расчетных значений. Однако в переходных процессах в отдельные промежутки времени возможны значительные отклонения от расчетных значений, которые для переходных процессов не имеют существенного значения. Поэтому сигнал о неисправности только по его основному признаку, определяемому в известном способе, в этом случае оказывается ложным, а если он подан на систему защиты гидротурбины, это ведет к ее экстренной необоснованной остановке.
Технической задачей изобретения является создание такого способа обнаружения неисправности в работе электрогидравлического регулятора поворотно-лопастной гидротурбины, который позволял бы более полно контролировать работу регулятора и давать сигнал о неисправности с учетом специфики переходных процессов.
Сущность изобретения заключается в том, что по способу обнаружения неисправности в работе электрогидравлического регулятора поворотно-лопастной гидротур- бины, по которому контролируют рассогласование между фактической величиной хода сервомотора, осуществляющего разворот лопастей рабочего колеса, и величиной управляющего воздействия, определяя наличие основного признака неисправности в виде отклонения контролируемой величины рассогласования в сторону превышения от его заданного максимально допустимого значения, и подают сигнал об обнаружении неисправности, одновременно определяют фактическое значение скорости и направление хода сервомотора, а по ним наличие вспомогательных признаков неисправности в виде несовпадения направления хода сервомотора и направления управляющего воздействия и в виде отклонения фактического значения скорости за пределы ее заданных значений, а сигнал об обнаружении неисправности подают в случае одновременного наличия основного и по меньшей мере одного из вспомогательных признаков неисправности.
Благодаря такому решению предотвращается подача ложного сигнала о неисправности в переходных процессах, в которых даже при значительном отклонении от допустимых значений рассогласования по величине хода сервомотора как основного признака неисправности, но при совпадении направления разворота лопастей рабочего колеса с командным воздействием и при расчетных скоростях сервомотора через определенный момент времени рассогласование по величине хода сервомотора входит в границы допустимых значений. В то же время в установившемся режиме работы при отклонении рассогласования по величине хода сервомотора от допустимых значений, сопровождающемся и отклонением скорости сервомотора от заданных значений, например, при нулевой скорости, фиксируется неисправность и подается соответствующий сигнал.
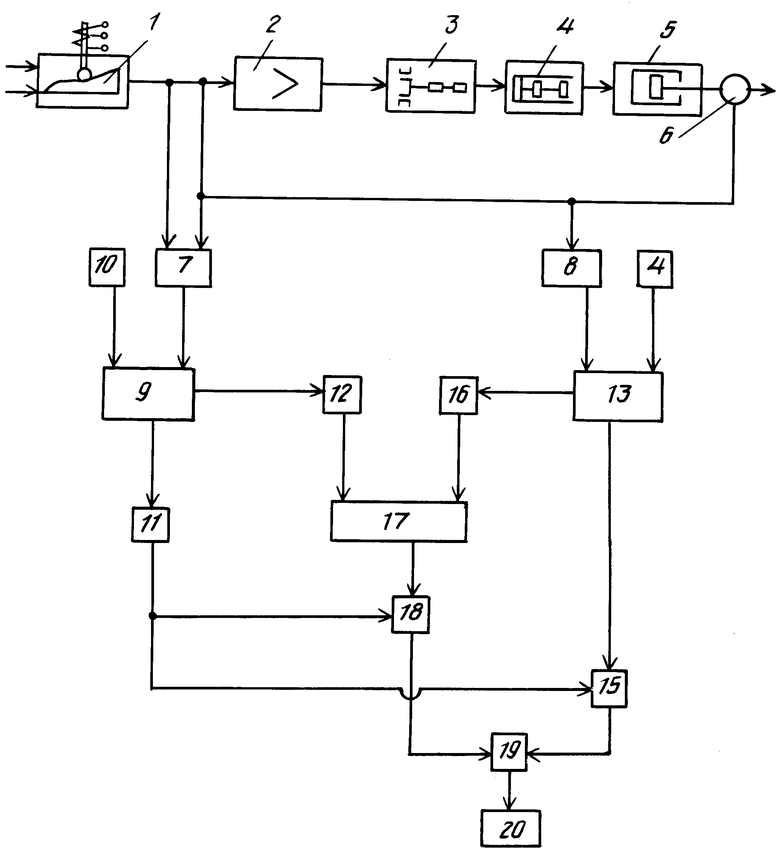
На чертеже изображена блок-схема электрогидравлического регулятора разворота лопастей рабочего колеса гидротурбины с системой обнаружения неисправности в его работе, реализующей способ согласно изобретению.
Электрогидравлический регулятор содержит комбинаторное устройство 1, связанное с направляющим аппаратом и воспринимающее сигнал о напоре Н, усилитель 2, электрогидравлический преобразователь 3, главный золотник 4, сервомотор 5, датчик 6 перемещения, блок 7 формирования сигнала рассогласования, блок 8 формирования сигнала скорости, блок 9 сравнения, блок 10 задания предельного значения рассогласования, блоки 11, 12, выполняющие функции вентильных устройств, блок 13 сравнения, блок 14 памяти расчетных значений, блок И 15, блок 16, выполняющий функции вентильного устройства, блок 17 сравнения, блок И 18, блок ИЛИ 19, командное устройство 20.
Способ обнаружения неисправности в работе электрогидравлического регулятора поворотно-лопастной турбины осуществляют следующим образом.
С помощью датчика 6 контролируют перемещение штока сервомотора 5, а генерируемый датчиком 6 сигнал используется в обратной связи схемы электрогидравлического регулятора и подается в систему обнаружения неисправности в его работе на блок 7 формирования сигнала рассогласования по величине хода сервомотора 5 и на блок 8 формирования сигнала о фактической скорости сервомотора. Блок 7 может быть выполнен, в частности, в виде суммирующего усилителя, на вход которого кроме сигнала от датчика 6 подается сигнал управляющего воздействия от комбинаторного устройства 1. Блок 8 может быть выполнен в виде дифференцирующего усилителя.
В блоке 7 контролируется рассогласование по величине хода сервомотора 5 между управляющим воздействием и фактическим положением сервомотора. Полученный сигнал рассогласования направляется в блок 9, на вход которого подается также сигнал о допустимом пределе значений рассогласования, поступающий от блока 10. Блок 9 выполняет функцию сравнения двух указанных сигналов, определяя наличие основного признака неисправности в виде отклонения контролируемой величины рассогласования в сторону превышения от его заданного максимально допустимого значения. Кроме того, в блоке 9 определяется знак направления хода сервомотора 5 по управляющему воздействию. Эти функции могут быть осуществлены в частности, с использованием двух компараторов в виде цепей с релейной характеристикой.
При превышении отклонения рассогласования по величине хода сервомотора 5 от допустимых значений сигнал подается в блок 11, работающий в качестве вентильного устройства. Сигнал о знаке направления хода сервомотора 5 по управляющему воздействию подается в блок 12, работающий, как и блок 11, в качестве вентильного устройства.
Сигнал о фактической скорости сервомотора 5, формируемый в блоке 8, поступает в блок 13 для сравнения с расчетными значениями, сигнал о которых поступает с блока 14. Таким образом, в блоке 13 определяют наличие вспомогательного признака неисправности в виде отклонения фактической скорости сервомотора 5 за пределы расчетных значений. Блок 13, как и блок 8, может быть выполнен с использованием компараторов в виде цепей с релейной характеристикой. При отклонении скорости сервомотора 5 от расчетных значений и в частном случае при нулевом значении скорости сигнал подается на последующие элементы системы обнаружения неисправности для определения его корреляции с сигналами о других отклонениях в работе регулятора. Для этого его направляют в логический блок И 15. В блоке 13 определяют также направление хода сервомотора 5, и соответствующий сигнал подается в блок 16.
Сигналы с блоков 12 и 16 поступают в блок 17 сравнения, в котором выявляют рассогласование направления хода сервомотора 5 по знаку управляющего воздействия и тем самым определяют наличие другого вспомогательного признака неисправности в виде несовпадения направления хода сервомотора и направления управляющего воздействия. При наличии рассогласования сигнал об этом подается на последующие элементы системы обнаружения неисправности для определения его корреляции с сигналами о других отклонениях в работе регулятора. Для этого его направляют в логический блок И 18.
На логические блоки И 15 и 18 кроме указанных сигналов о несоответствии направления хода сервомотора 5 по знаку или величине поступает также сигнал от блока 9 через блок 11 при выявлении отклонения от допустимых значений рассогласования по величине хода сервомотора 5. Если оба сигнала на любом из блоков И 15, 18 совпадают по времени, то соответствующий сигнал через блок ИЛИ 19 подается на командное устройство 20 в качестве сигнала о неисправности в работе электрогидравлического регулятора. В качестве командного устройства 20 может быть использован, в частности, фиксатор с электромагнитным управлением в системе защиты гидротурбин, который останавливает функционирование сервомотора 5. При этом одновременно системой защиты блокируется поступление управляющего воздействия от комбинаторного устройства 1.
Как это следует из изложенного, при нормальном функционировании электрогидравлического регулятора, осуществляя соответствующий контроль за сервомотором 5 с помощью описанной системы, никаких отклонений не выявляют.
В установившемся режиме при отсутствии управляющего воздействия в результате выхода из-под контроля сервомотора 5, управляющего разворотом лопастей рабочего колеса, возможно самопроизвольное открывание или закрывание лопастей рабочего колеса, что может привести к вибрации ротора гидротурбины или к ее разгону. Однако в этом случае при нулевом сигнале управляющего воздействия устанавливается отклонение от допустимых значений рассогласования по ходу сервомотора 5 и отклонение направления хода сервомотора по знаку управляющего воздействия. В этом случае на блок И 15 поступают одновременно два сигнала основной и вспомогательный о недопустимых отклонениях, и суммарный сигнал об обнаружении неисправности поступает в командное устройство 20.
При осуществлении регулирования неизбежна флуктуация сигнала рассогласования по ходу сервомотора 5. Однако элементы системы обнаружения неисправности не выявляют каких-либо недопустимых отклонений. Однако, если величина рассогласования превышает допустимые значения, то это выявляется в блоке 9 сравнения, и соответствующий сигнал поступает на блоки И 18 и 15. Такая ситуация возможна только в том случае, если возникают какие-либо неисправности в системе регулирования, связанные с отклонением скорости сервомотора 5 от заданной. Это может произойти, например, при засорении электрогидравлического преобразователя 3, ведущем к резкому снижению скорости сервомотора 5, или при обрыве питания одного из элементов управления главным золотником 4, ведущем к остановке сервомотора. Соответствующее недопустимое отклонение выявлено в блоке 13 сравнения, и соответствующий сигнал отступает на блок И 15. На его выходе оказываются одновременно два сигнала основной и вспомогательный, и суммарный сигнал об обнаружении неисправности поступает в командное устройство 20.
В переходных процессах, например при сбросе нагрузки, динамические процессы в электрогидравлическом регуляторе весьма значительны. При этом возможно в определенный период времени значительное отклонение по величине хода сервомотора 5 от заданных значений, что выявляется в блоке 9 сравнения, и соответствующий сигнал об основном признаке неисправности поступает на вход блоков И 18 и 15. Однако, если при этом направление хода сервомотора 5 совпадает со знаком управляющего воздействия, а его скорость соответствует расчетной, никаких недопустимых отклонений не выявляется ни в блоке 17, ни в блоке 13, поэтому сигналы от блока И 18 или/и блока И 15 об обнаружении неисправности в командное устройство 20 не поступают. Тем самым предотвращается ложное срабатывание системы защиты.
Возможны различные сочетания ситуаций в установившемся режиме и переходных процессах. Однако при обнаружении неисправности по основному и вспомогательным признакам при всех обстоятельствах обеспечивается надежный контроль за работой электрогидравлического регулятора и вместе с тем предотвращается ложное срабатывание системы защиты в переходных процессах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЛОПАСТЯМИ РАБОЧЕГО КОЛЕСА ГИДРОТУРБИНЫ | 1996 |
|
RU2106522C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕГУЛИРУЮЩИМ ОРГАНОМ ГИДРОТУРБИНЫ | 1995 |
|
RU2100644C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАТВОРОМ ДЛЯ НАПОРНЫХ ТРУБОПРОВОДОВ ГИДРОМАШИН | 1993 |
|
RU2079006C1 |
| СИСТЕМА ПРОТИВОРАЗГОННОЙ ЗАЩИТЫ ГИДРОТУРБИНЫ | 1999 |
|
RU2163980C2 |
| СИСТЕМА АВТОНОМНОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ И ДАВЛЕНИЯ В ОТБОРЕ ПАРОВОЙ ТУРБИНЫ | 1999 |
|
RU2166099C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАПРАВЛЯЮЩИМ АППАРАТОМ МАЛОЙ ГИДРОТУРБИНЫ | 1993 |
|
RU2069793C1 |
| УСТРОЙСТВО АВАРИЙНОЙ ЗАЩИТЫ ГИДРОТУРБИНЫ | 1997 |
|
RU2171396C2 |
| ЦЕНТРОБЕЖНЫЙ ВЫКЛЮЧАТЕЛЬ | 1996 |
|
RU2126096C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАТВОРОМ ДЛЯ НАПОРНЫХ ТРУБОПРОВОДОВ ГИДРОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2072442C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОТБОРАМИ ТЕПЛОФИКАЦИОННОЙ ПАРОВОЙ ТУРБИНЫ | 1999 |
|
RU2196897C2 |
Сущность изобретения: контролируют рассогласование между фактической величиной хода сервомотора, осуществляющего разворот лопастей рабочего колеса, и величиной управляющего воздействия. Определяют наличие основного признака неисправности в виде отклонения контролируемой величины рассогласования в сторону превышения от его заданного максимально допустимого значения. Подают сигнал об обнаружении неисправности. Одновременно определяют фактическое значение скорости и направление хода сервомотора, поним наличие вспомогательных признаков неисправности в виде несовпадения направления хода сервомотора и направления управляющего воздействия и в виде отклонения фактического значения скорости за пределы ее заданных значений. Сигнал об обнаружении неисправности подают в случае одновременного наличия основного и по меньшей мере одного из вспомогательных признаков неисправности. 1 ил.
СПОСОБ ОБНАРУЖЕНИЯ НЕИСПРАВНОСТИ В РАБОТЕ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО РЕГУЛЯТОРА ПОВОРОТНО-ЛОПАСТНОЙ ГИДРОТУРБИНЫ, при котором контролируют рассогласование между фактической величиной хода сервомотора, осуществляющего разворот лопастей рабочего колеса, и величиной управляющего воздействия, определяя наличие основного признака неисправности в виде отклонения контролируемой величины рассогласования в сторону превышения от его заданного максимально допустимого значения, и подают сигнал об обнаружении неисправности, отличающийся тем, что одновременно определяют фактическое значение скорости и направление хода сервомотора, а по ним наличие вспомогательных признаков неисправности в виде несовпадения направления хода сервомотора и направления управляющего воздействия и в виде отклонения фактического значения скорости за пределы ее заданных значений, а сигнал об обнаружении неисправности подают в случае одновременного наличия основного и по меньшей мере одного из вспомогательных признаков неисправности.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

