Изобретение относится к приборостроению и может быть использовано в часовой промышленности.
Известно индикаторное устройство, в котором магнит установлен с возможностью вращения и служит индикаторным элементом [1]
Недостатком данного устройства является ненадежность в работе.
В качестве прототипа изобретения выбран индикатор, в котором на основании размещены шаговые модули в виде семи сегментов [2]
Недостатком данного устройства является сложность конструкции и недостаточная надежность в работе.
Целью изобретения является повышение надежности и упрощение конструкции.
Цель достигается тем, что в известном индикаторе, содержащем пластину-основание, на которой размещены шаговые модули, каждый из которых содержит цилиндрический ротор, опоры вращения которого размещены в двух стойках, два магнитопроводных стержня с полюсными наконечниками и обмоткой управления, закрепленных на пластине-основании, между стойками вдоль оси ротора, и цилиндрический магнит, в нем пластина-основание выполнена магнитопроводной без стыков, индикаторный элемент расположен на цилиндрической поверхности ротора, а опоры вращения всех семи роторов размещены в шести стойках.
Магнит может быть выполнен в виде двух колец, снабженных зубчатыми дисками и размещенных внутри цилиндрического ротора, выполненного полым, а обмотка управления может быть выполнена в виде двух секций, размещенных на стержнях каждого модуля напротив зубцов дисков кольцевых магнитов.
Стержни с секциями обмотки размещены по разные стороны от оси вращения ротора или в зазоре между ротором и пластиной-основанием.
Кроме того, ось ротора жестко закреплена на стойках и снабжена подшипниками, внешние кольца которых жестко связаны с ротором, пластина-основание снабжена дополнительными постоянными магнитами, размещенными на ней со стороны, противоположной стойкам, причем полярность дополнительных постоянных магнитов противоположна полярности кольцевых магнитов, намагниченных аксиально, а секции обмотки управления включены согласно.
Цилиндрический магнит установлен на жестко закрепленной оси ротора, выполненного с вырезами на его боковой поверхности, расположенными напротив полюсных наконечников стержней. Магнитопроводные стержни выполнены за одно целое с пластиной-основанием, а цилиндрический ротор выполнен за одно целое с магнитом, намагниченным по диаметру с противоположной полярностью, причем обмотка управления расположена на одном из стержней, а ее витки ориентированы параллельно оси ротора.
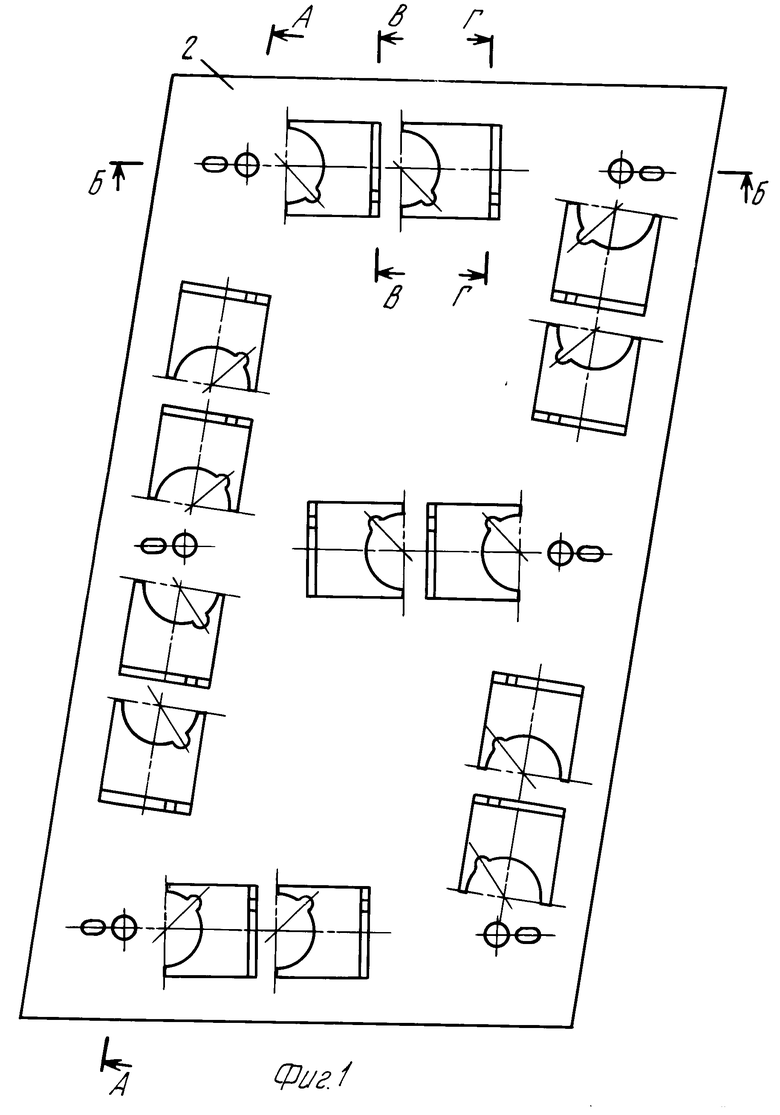
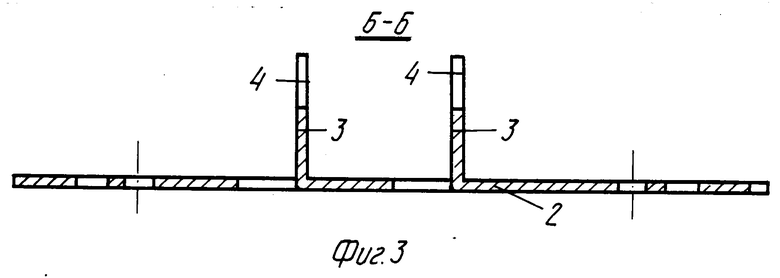
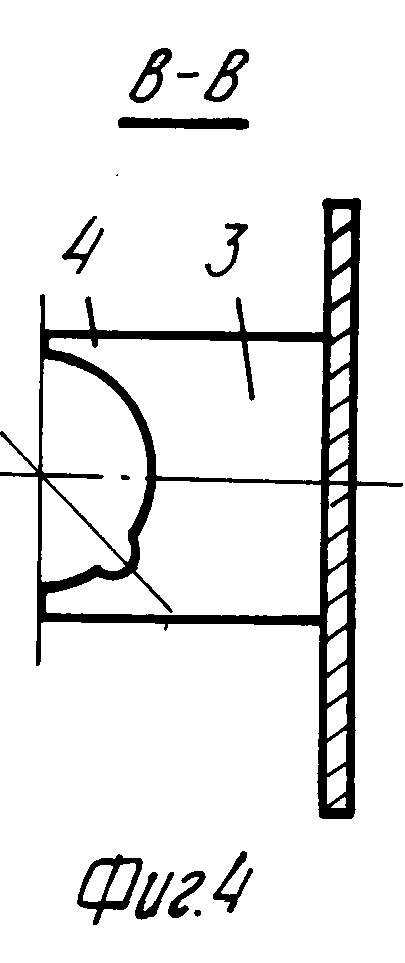
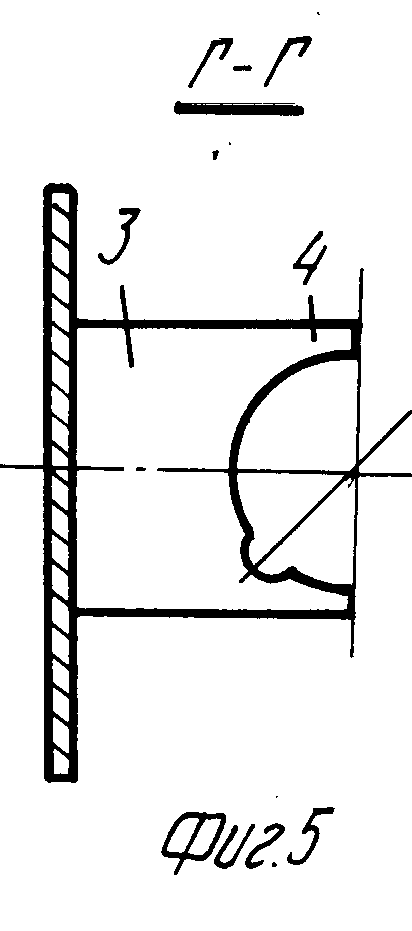
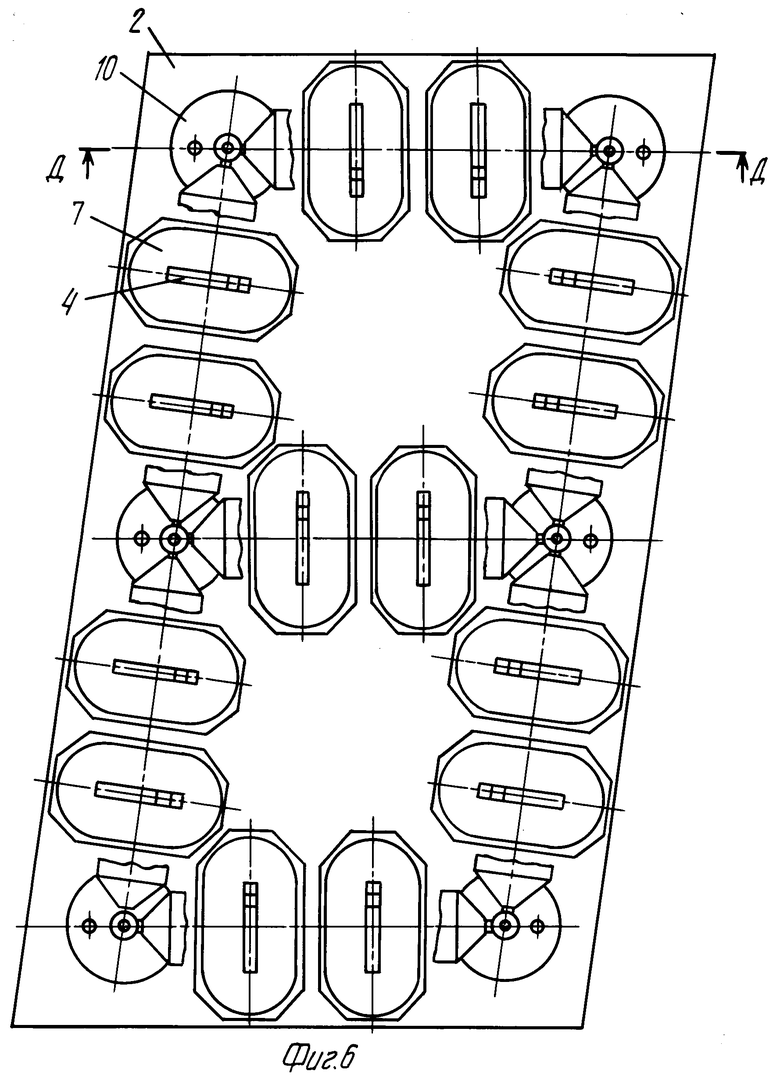
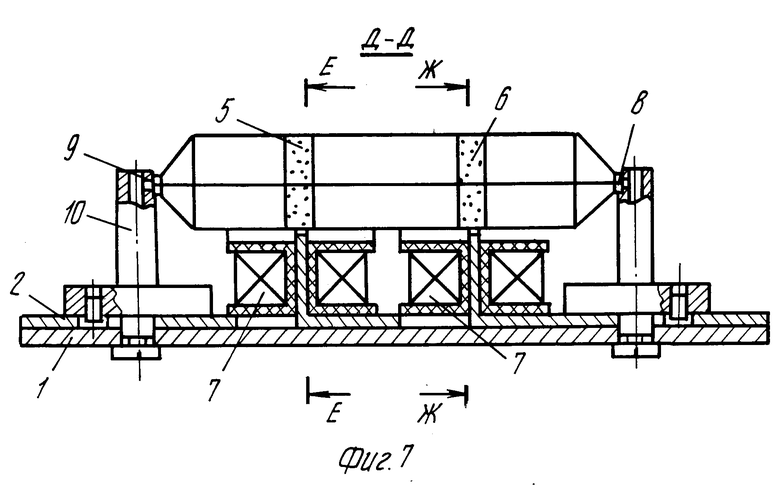
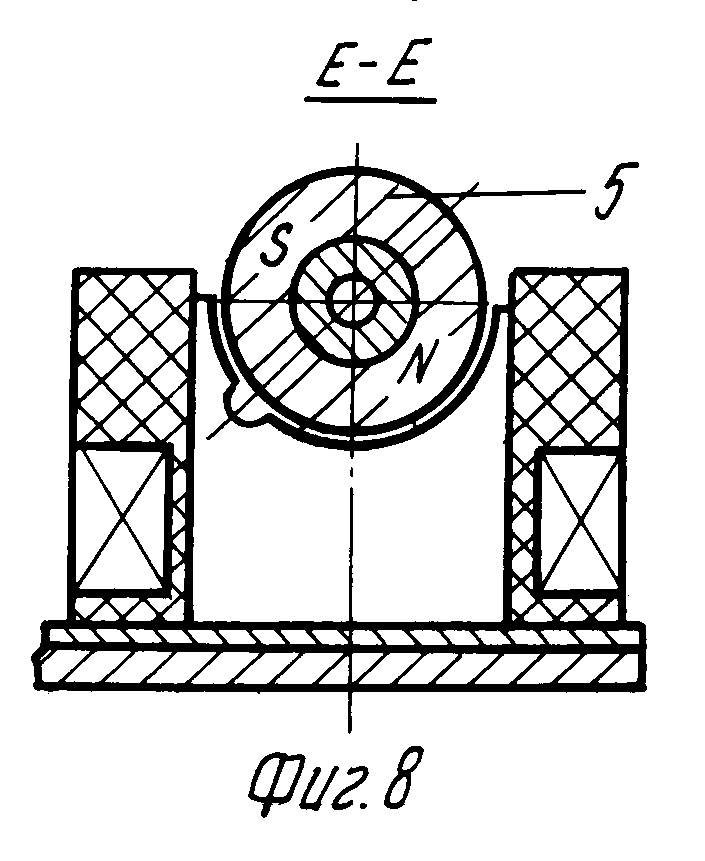
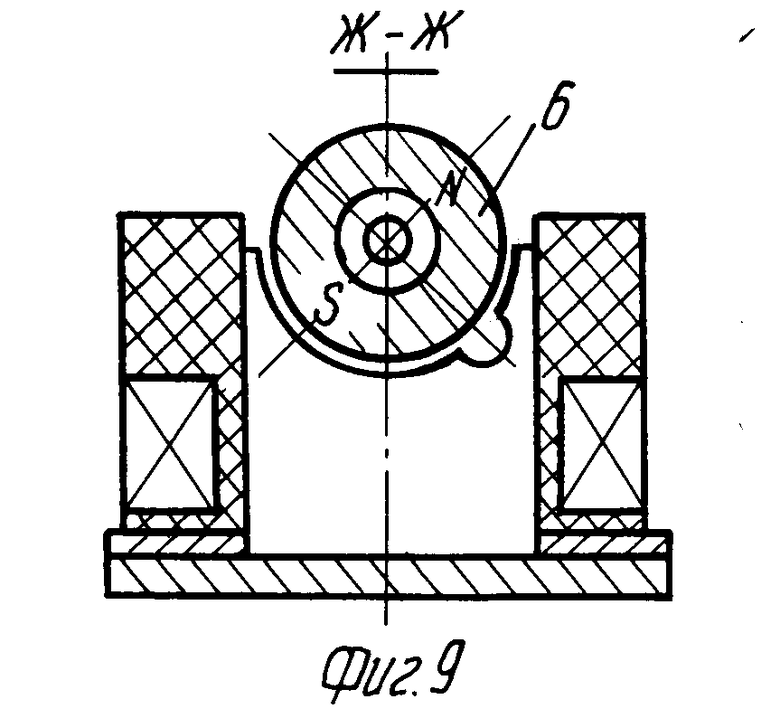
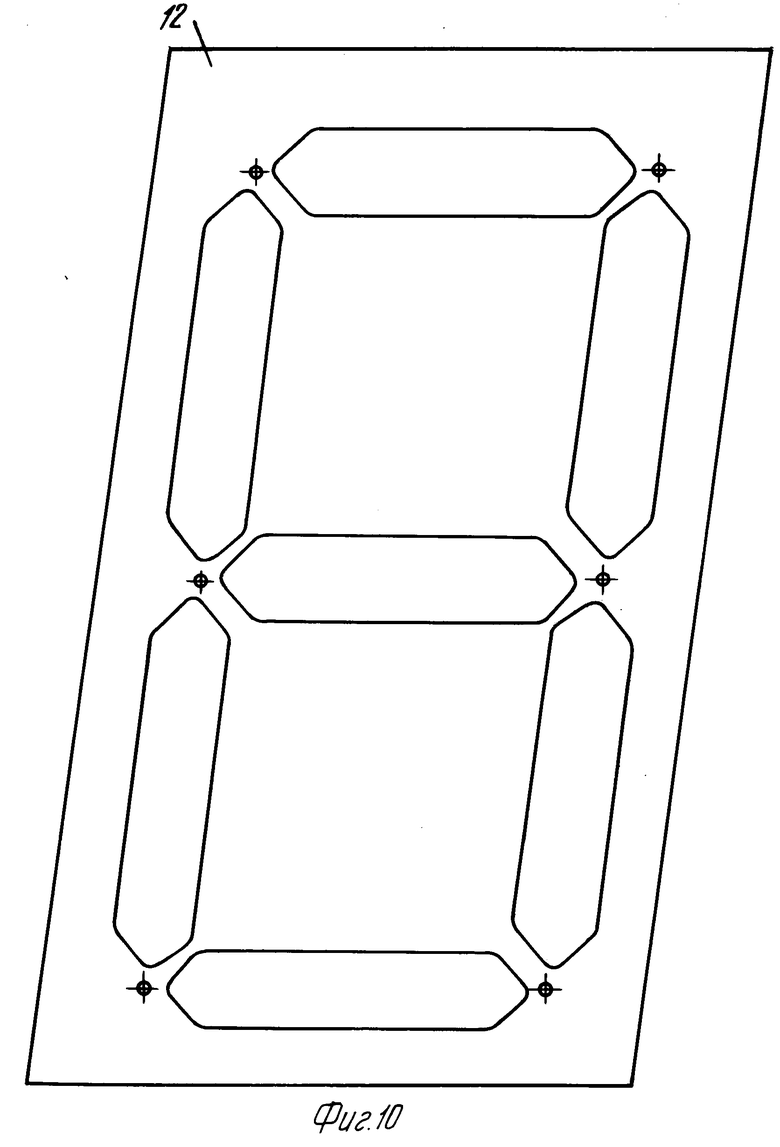
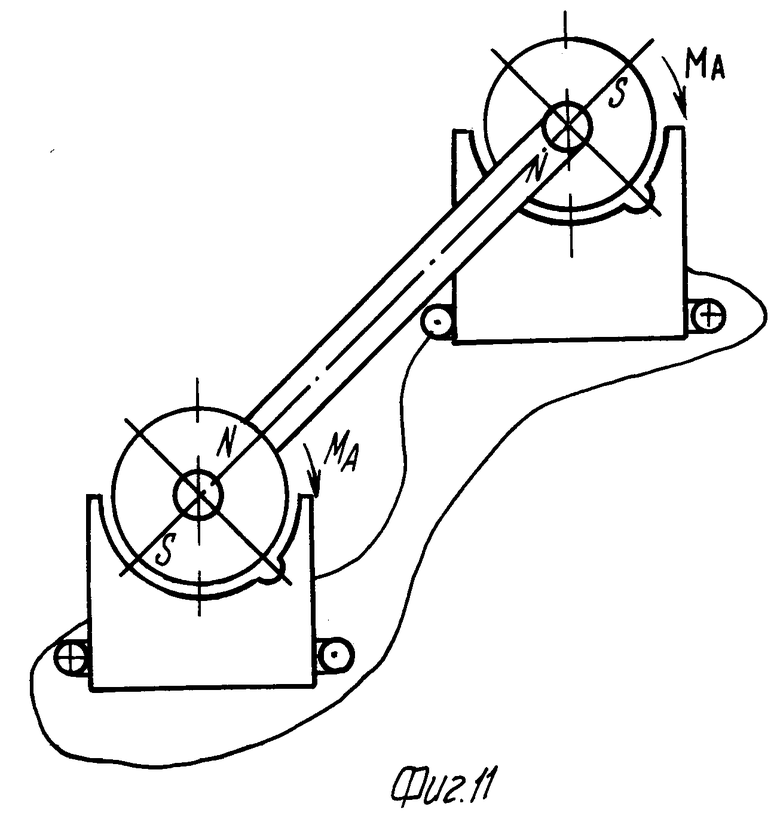
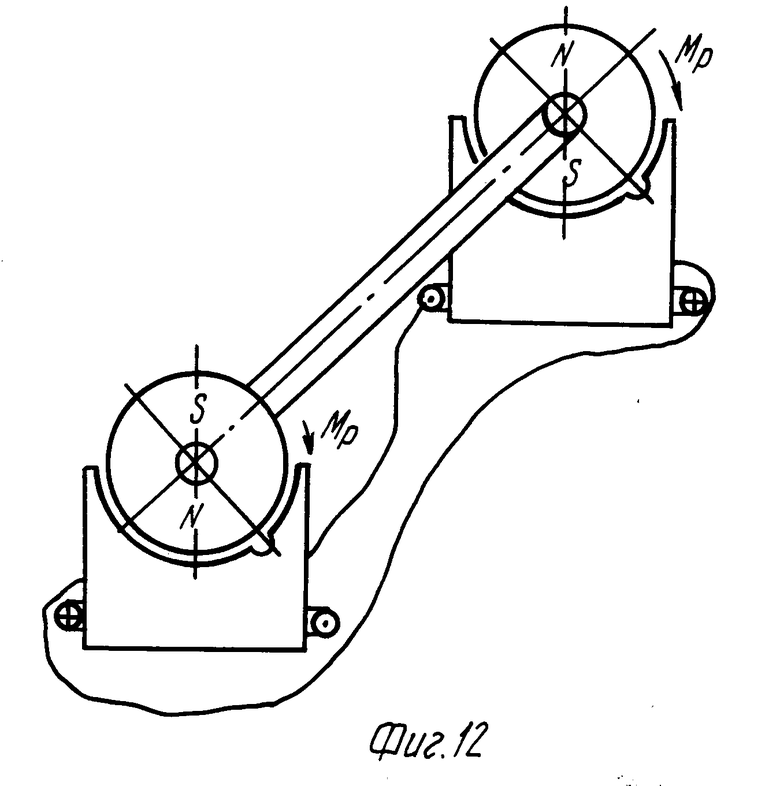
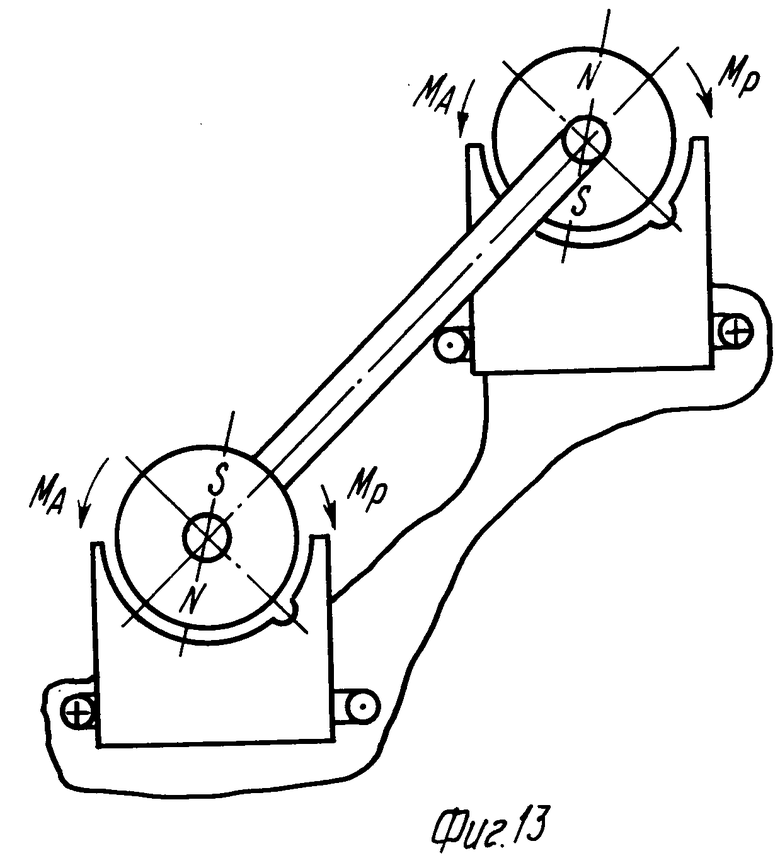
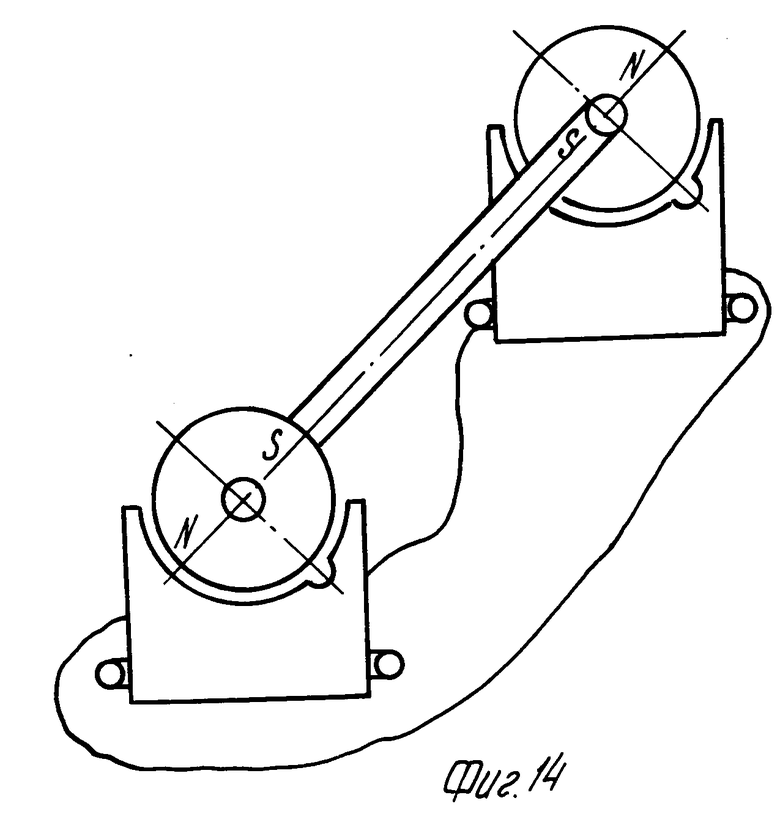
На фиг. 1 показан магнитопровод без стыков; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1; на фиг. 4,5 разрез В-В и Г-Г на фиг. 1 соответственно; на фиг. 6 положение катушек и опор для роторов на магнитопроводе; на фиг. 7 разрез Д-Д на фиг. 6; на фиг. 8 и 9 разрезы Е-Е и Ж-Ж на фиг. 7 соответственно; на фиг. 10 пластина со стороны индикации цифровое изображение; на фиг. 11-14 показан принцип действия.
На корпусе 1 (алюминий, латунь, пластмасса и т.д.) установлено основание пластинчатый магнитопровод 2 (не имеющий стыков) со стержнями 3 и полюсными наконечниками 4.
Магниты-роторы 5 и 6 установлены с взаимным разворотом на пол-оборота на осях вращения, перпендикулярных осям катушек 7 валов 8, цапфы 9 которых размещены в специальных стойках 10 (см. фиг. 6, 7).
На стойки 10 может быть установлена пластина 11 для получения изображения.
Устройство работает с независимым управлением семью бленкерами.
При отсутствии тока в катушках 7 фиксированное положение (см. фиг. 11). С поступлением в катушки 7 тока, как показано на фиг. 11-14, возникает активный момент, поворачивающий вал 8 с роторами 5, 6, а после окончания импульса доворот под действием реактивного момента фиксации. Шаг в пол-оборота завершен. Поступает новый импульс другой полярности и процесс повторяется.
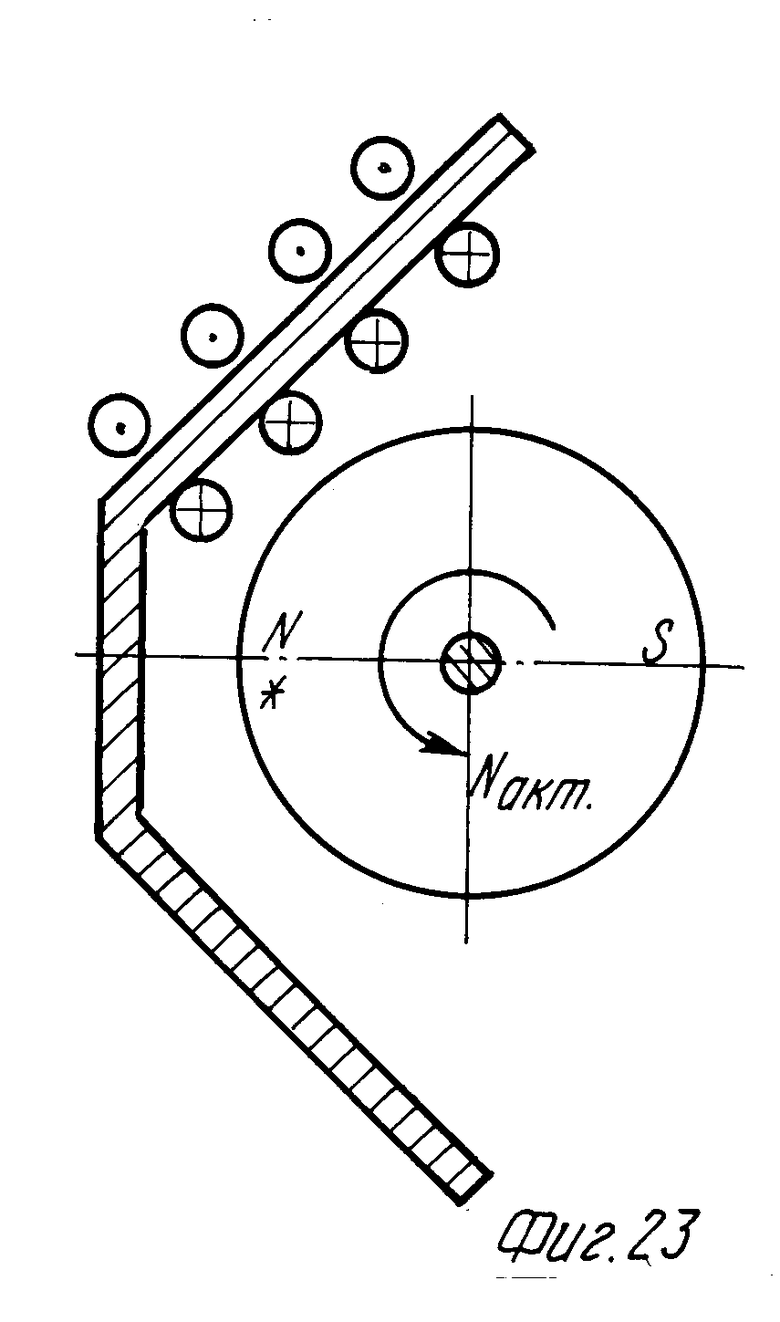
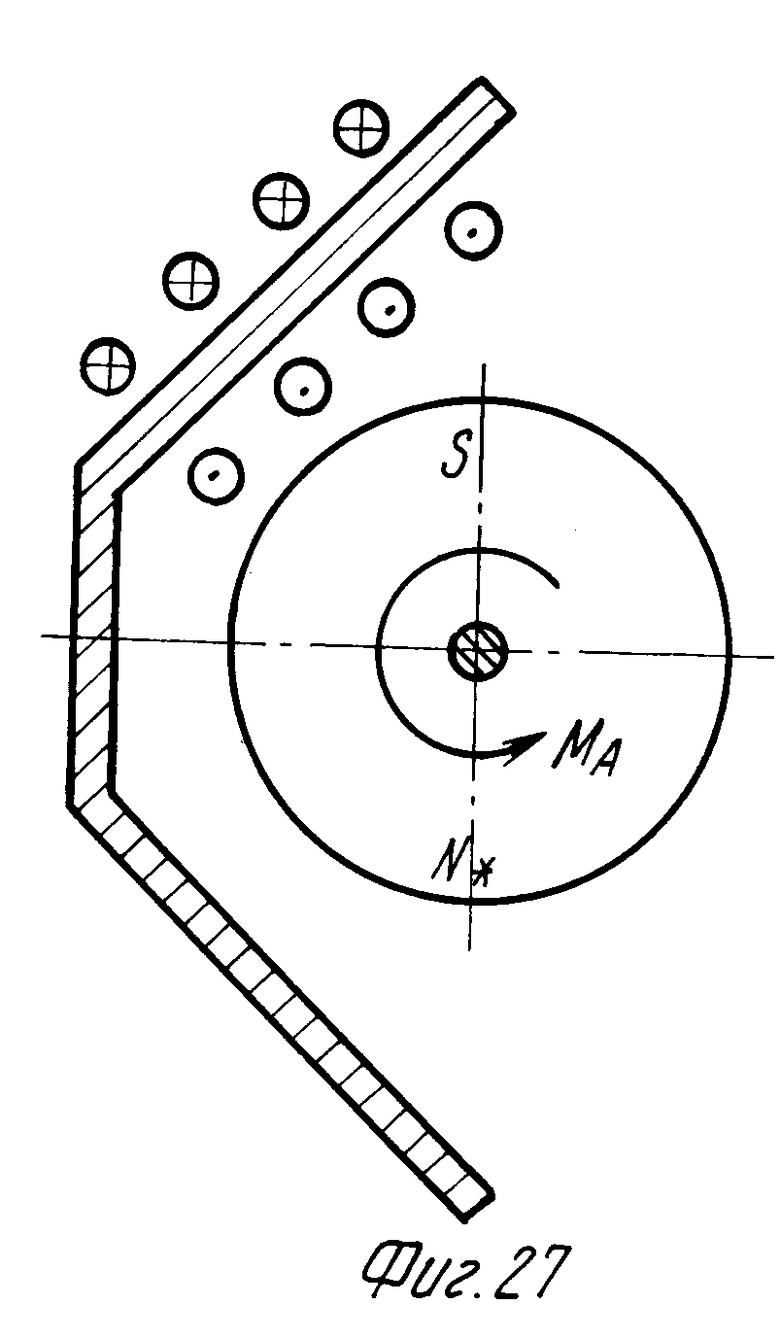
Вторая модификация индикатора поясняется фиг. 15-27.
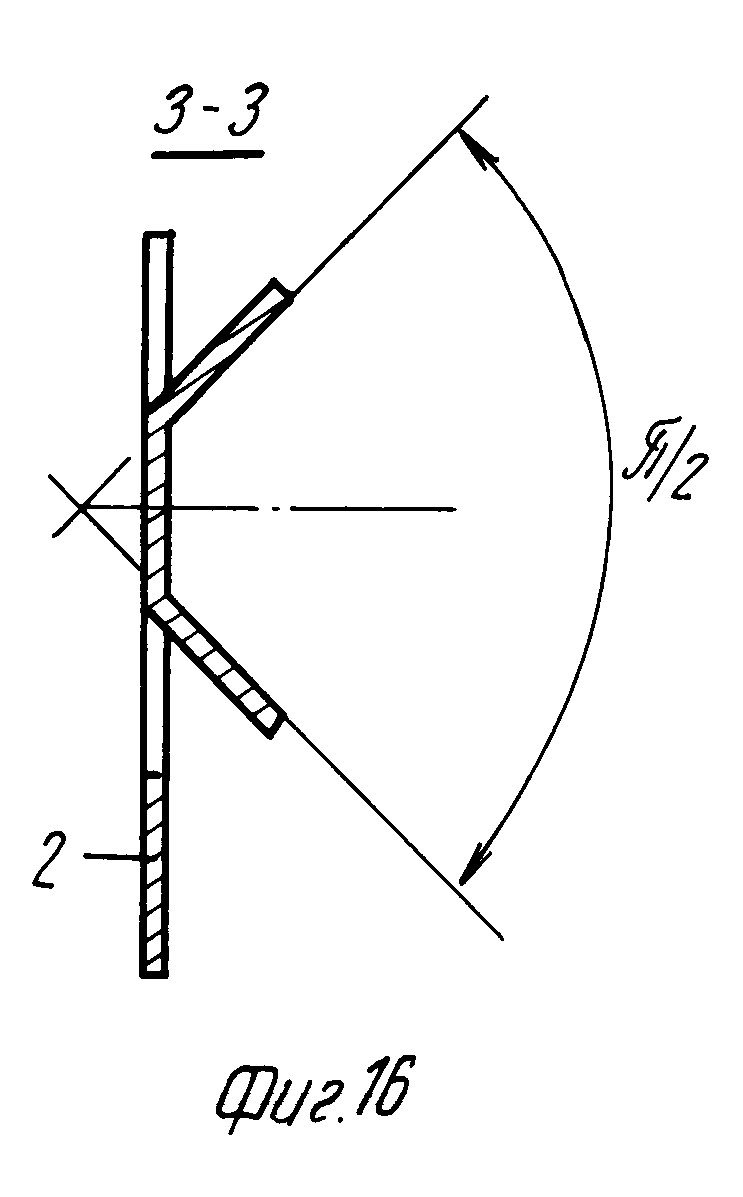
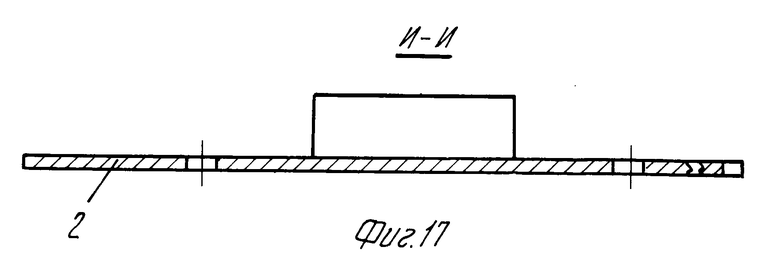
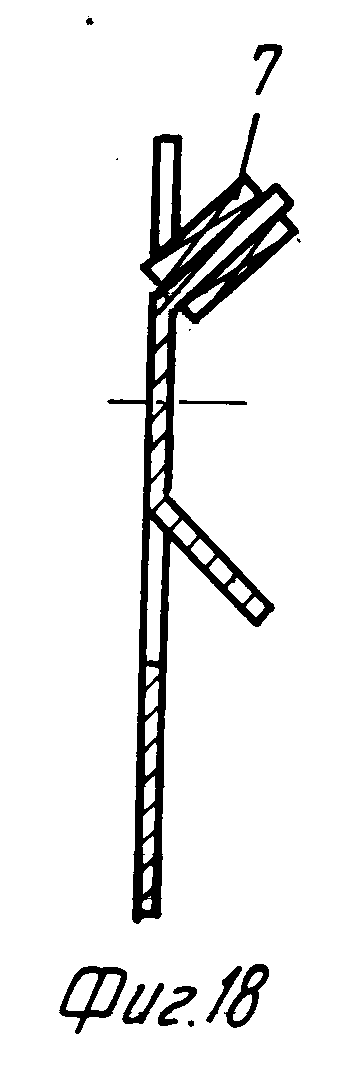
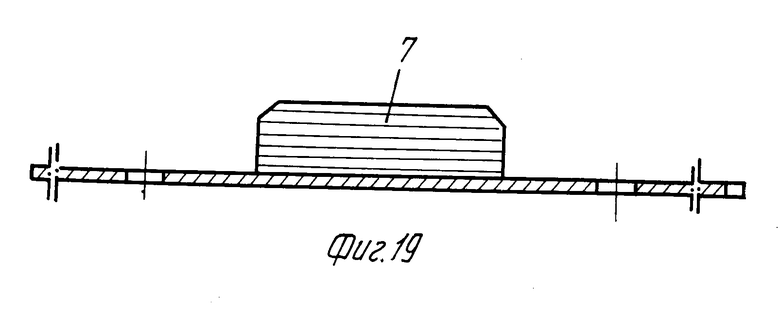
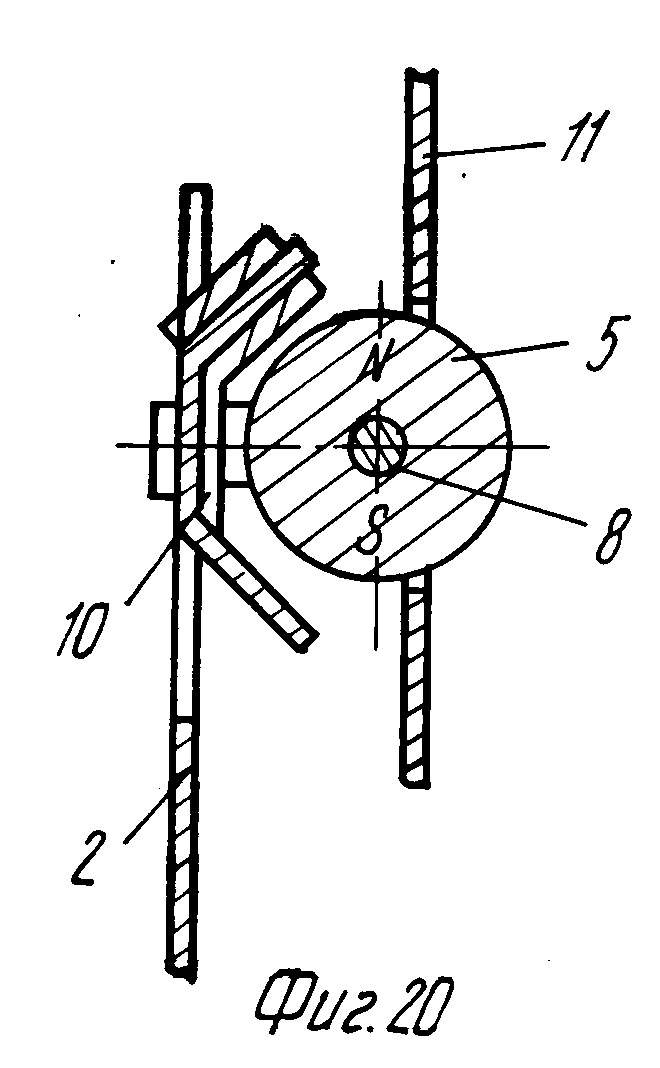
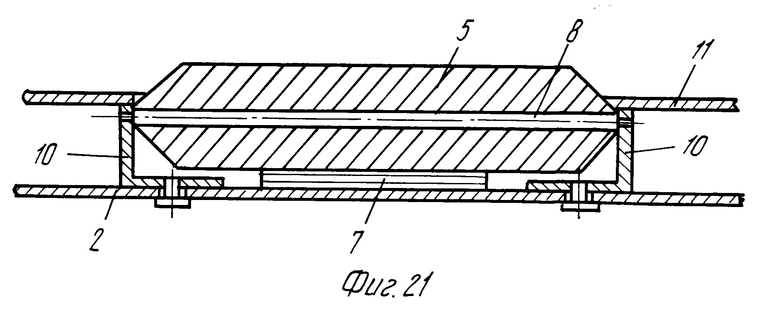
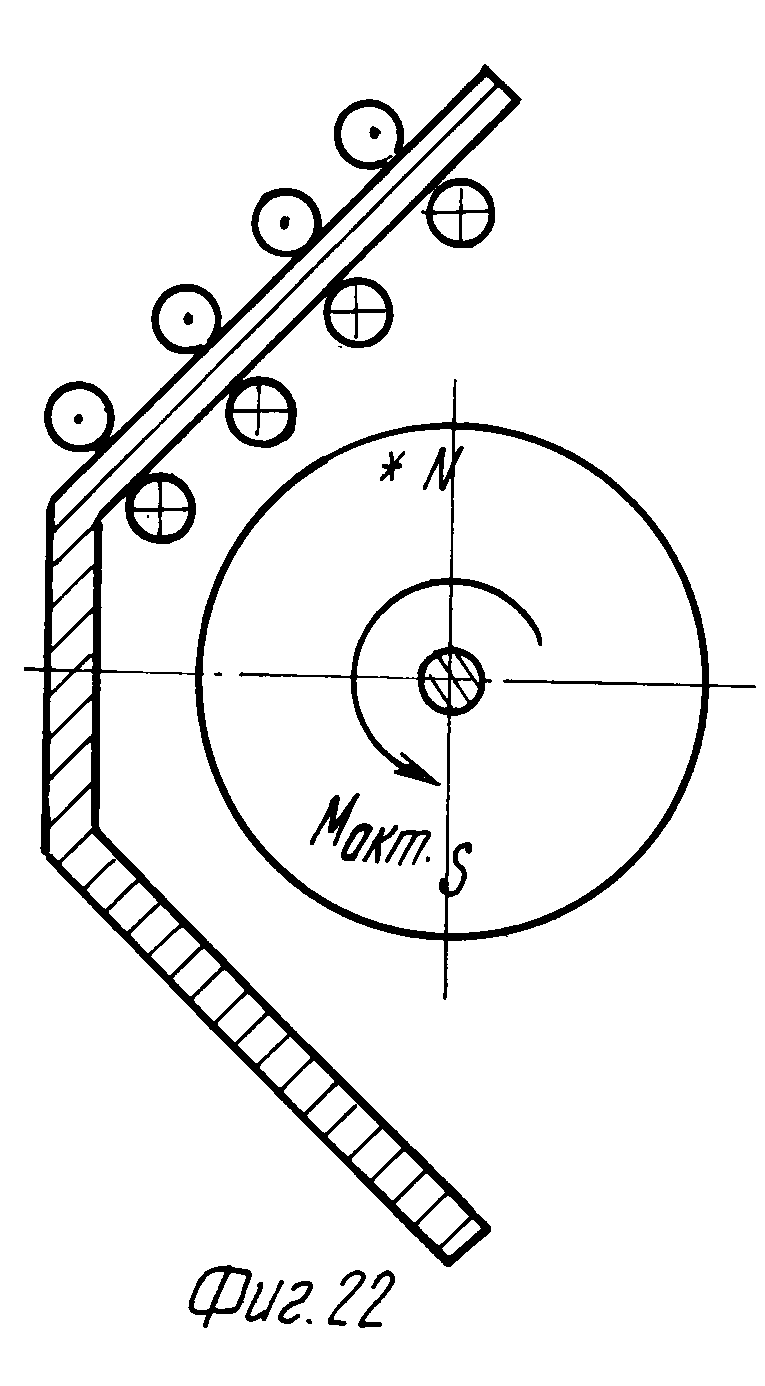
На фиг. 15 показана пластина магнитопровода; на фиг. 16, 17 разрезы З-З и И-И на фиг. 15; на фиг. 18, 19 катушка на магнитопроводе по фиг. 15-17; на фиг. 20, 21 взаиморасположение ротора магнита по отношению к статору согласно фиг. 15-19; на фиг. 22-27 показан принцип действия.
На магнитопроводе установлены катушки 7 и стойки-кронштейны 10. Роторы-магниты 5 установлены на валах (с возможностью вращения, например, в отверстиях в кронштейнах).
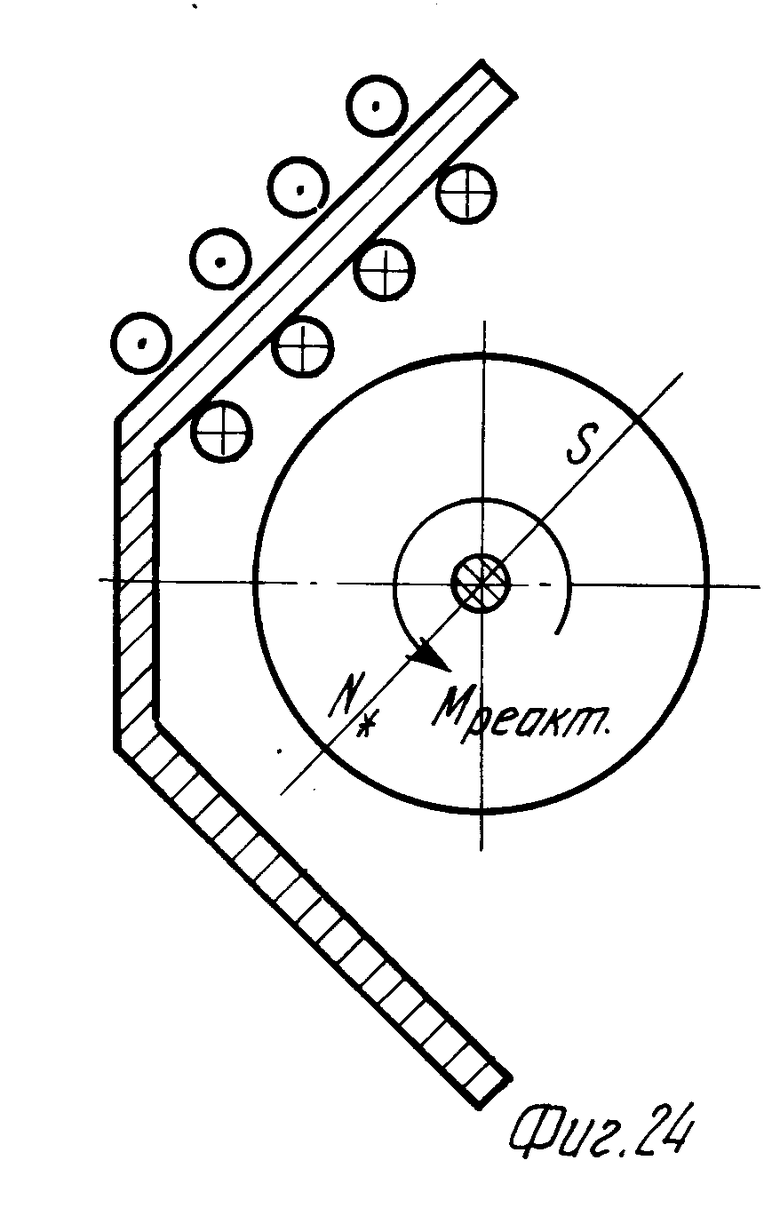
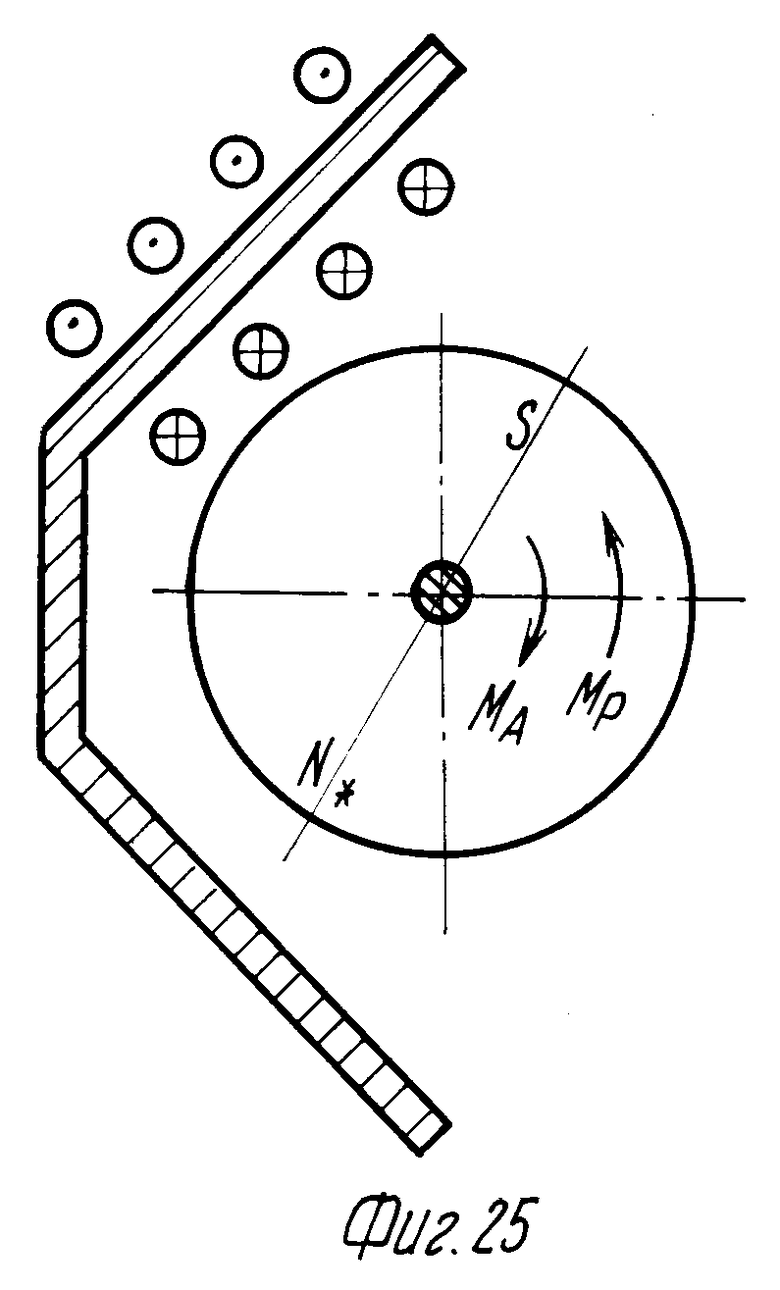
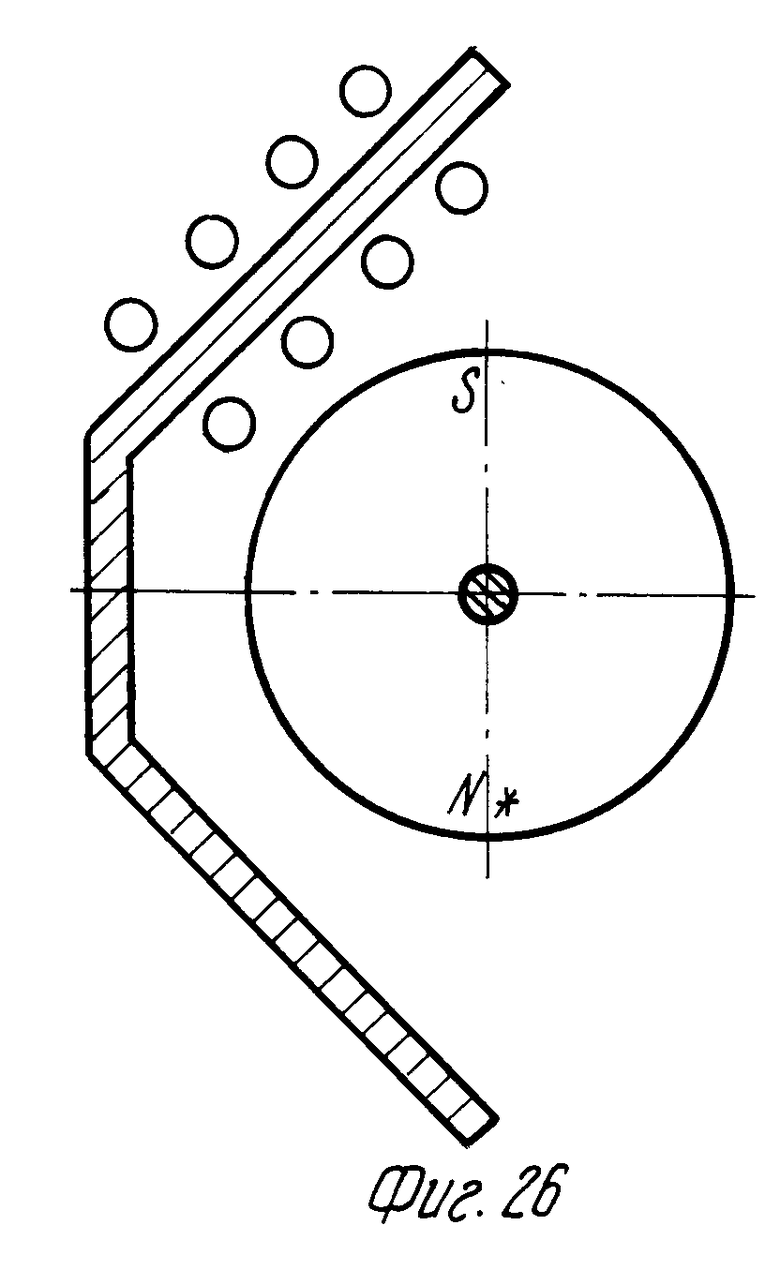
При отсутствии сигнала в обмотке положение ротора соответствует положению на фиг. 20, 22. С появлением тока (см. фиг. 22) происходит поворот до положения, показанного на фиг. 24, где действуют в разные стороны активный момент и реактивный момент фиксации (см. фиг. 25). Доворот до положения, показанного на фиг. 26, завершает шаг в половину оборота. Дальше процесс повторяется с появлением импульса противоположной полярности (см. фиг. 27).
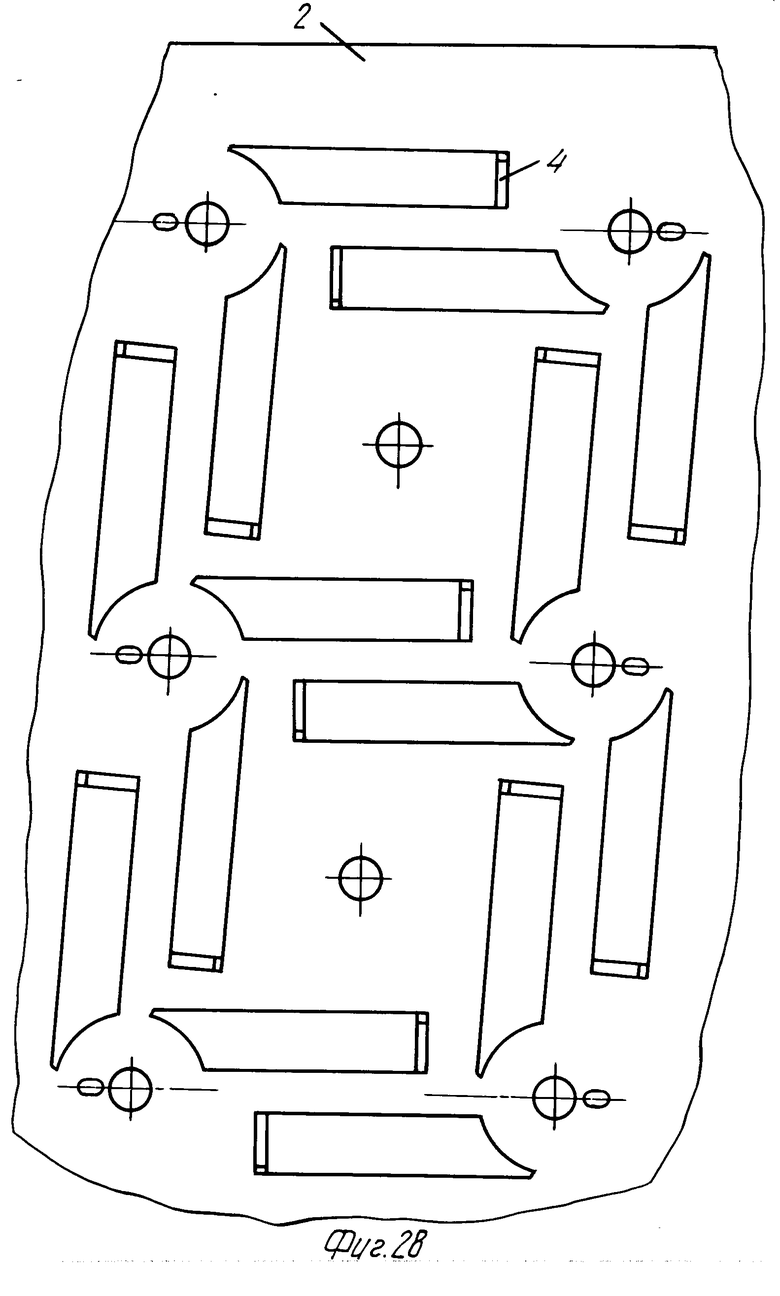
Третья модификация исполнения индикатора представлена на фиг. 28-50.
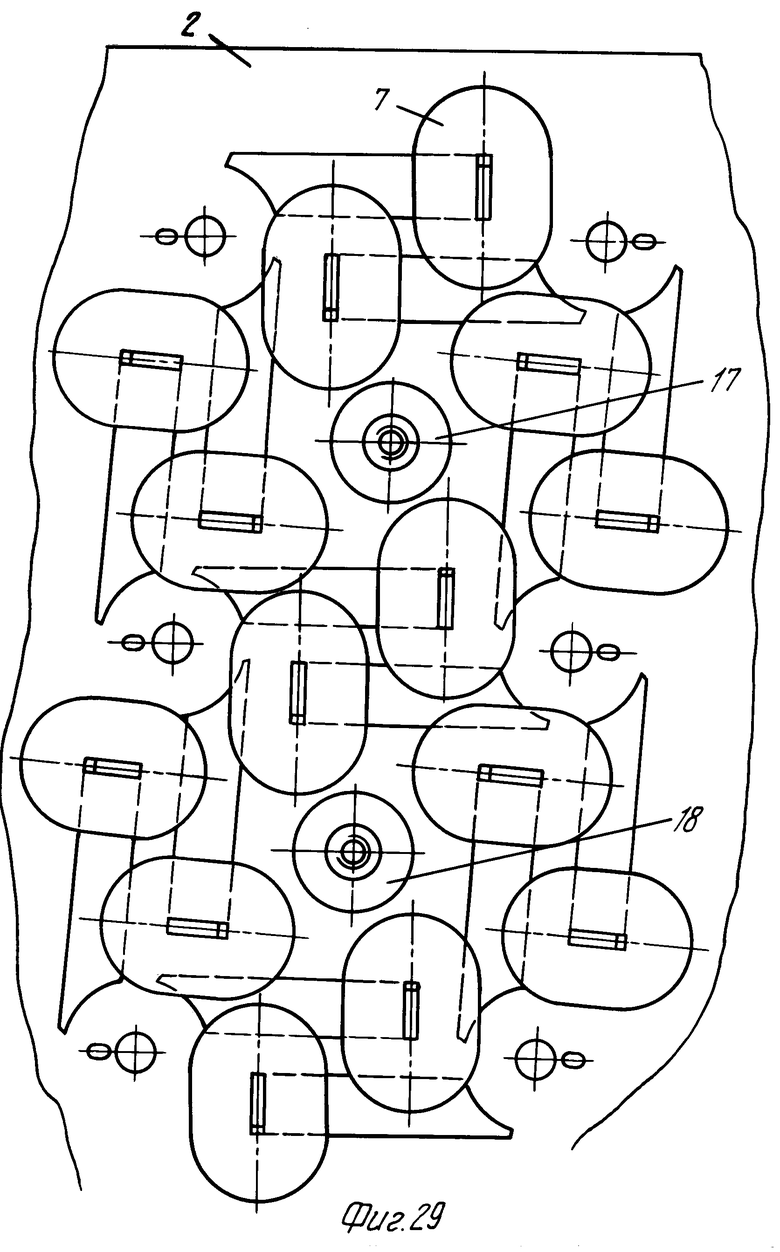
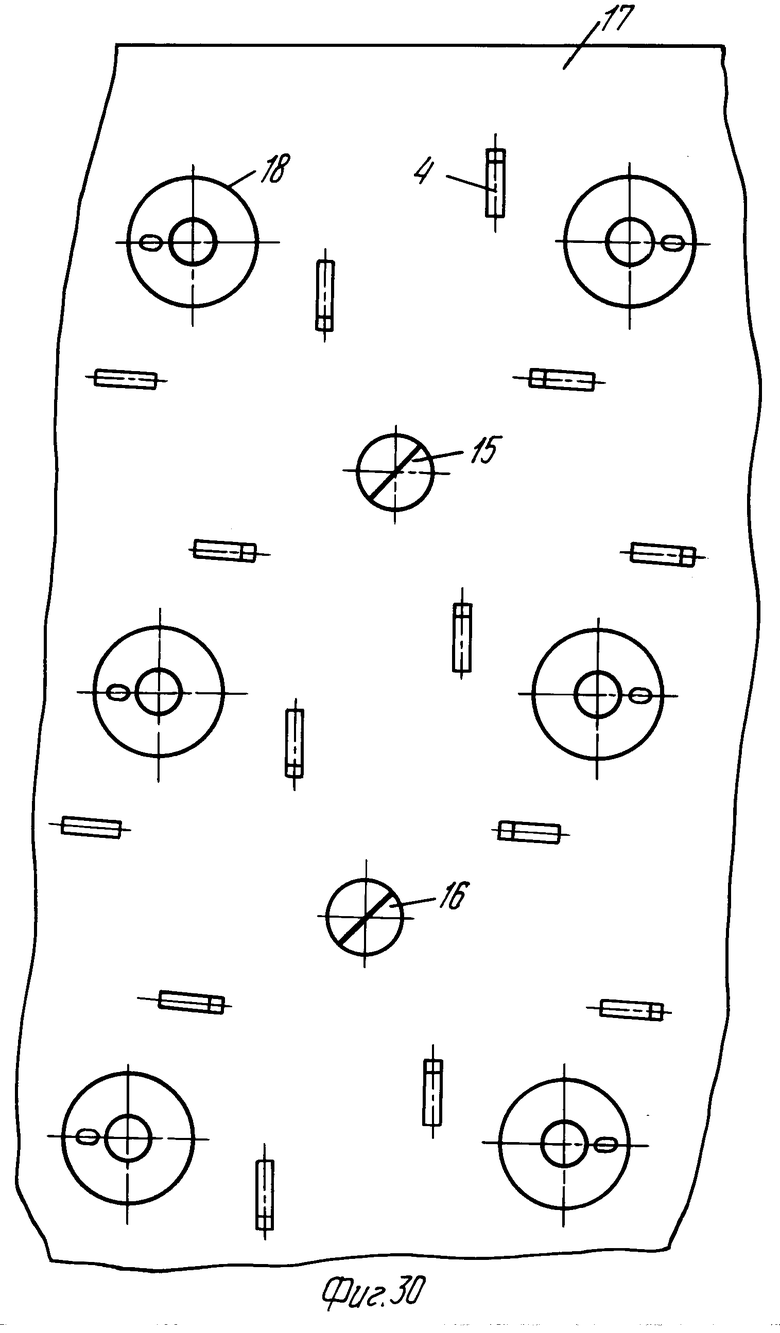
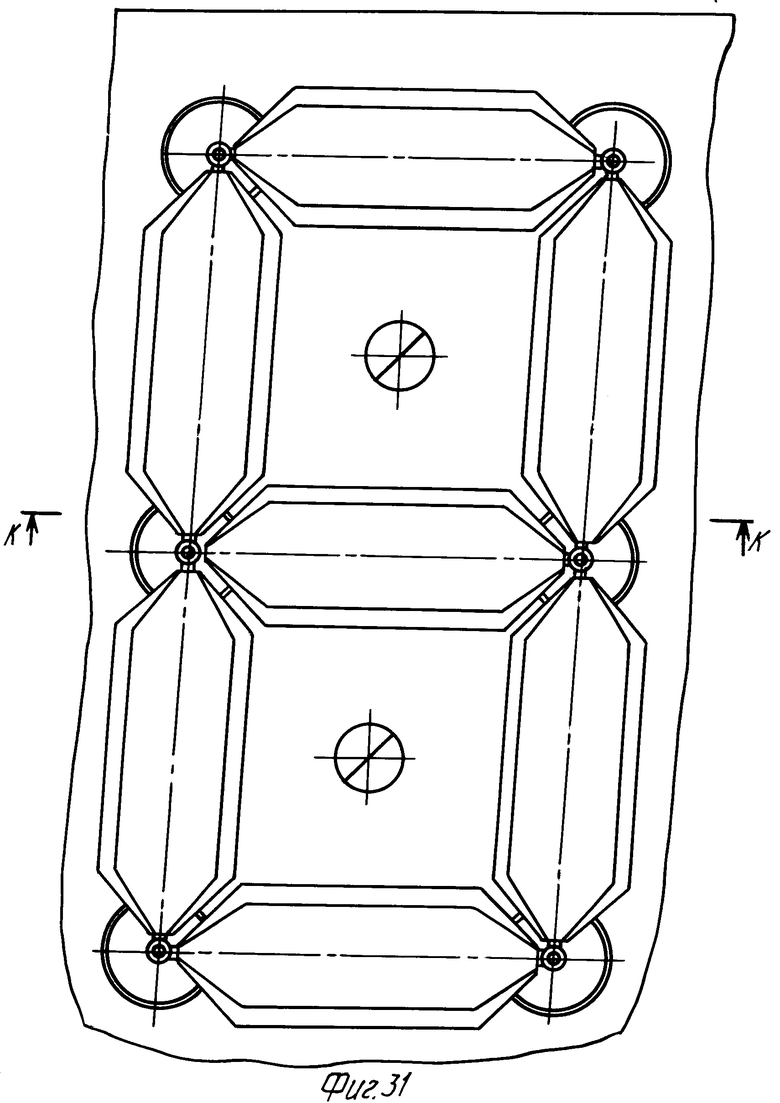
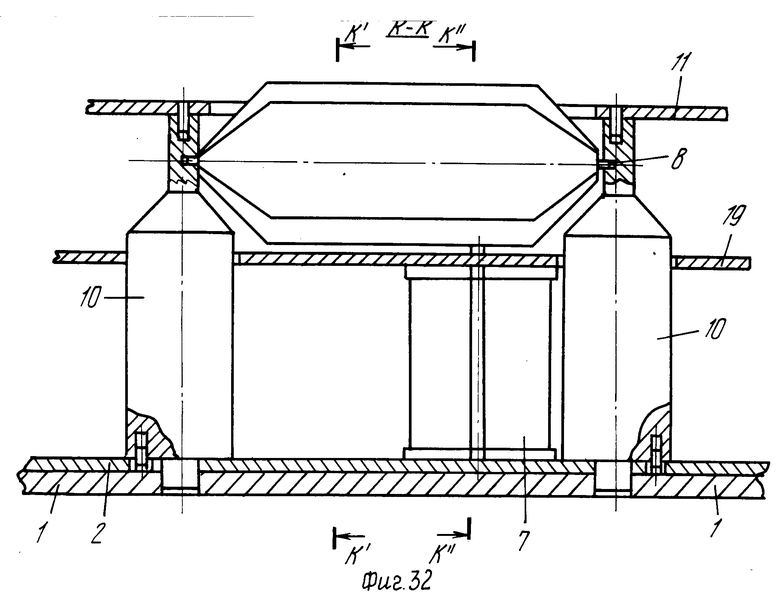
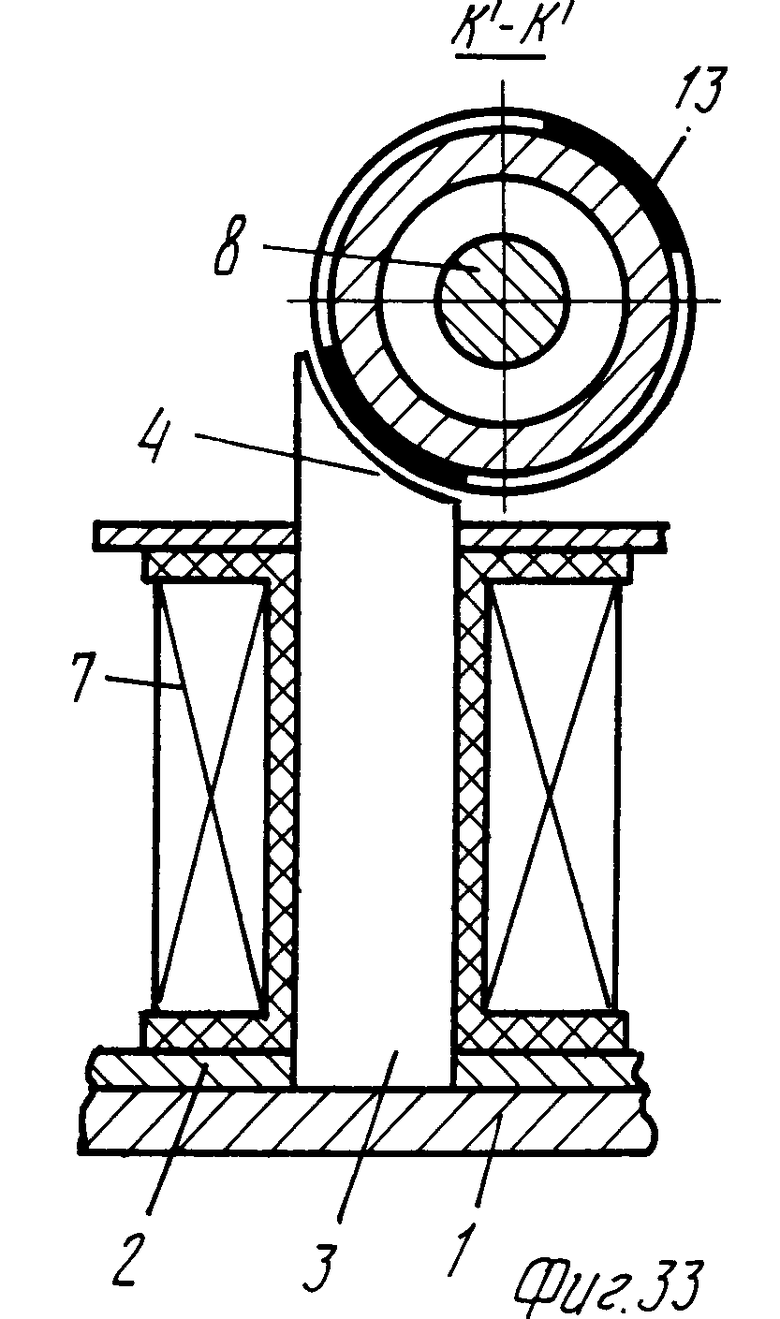
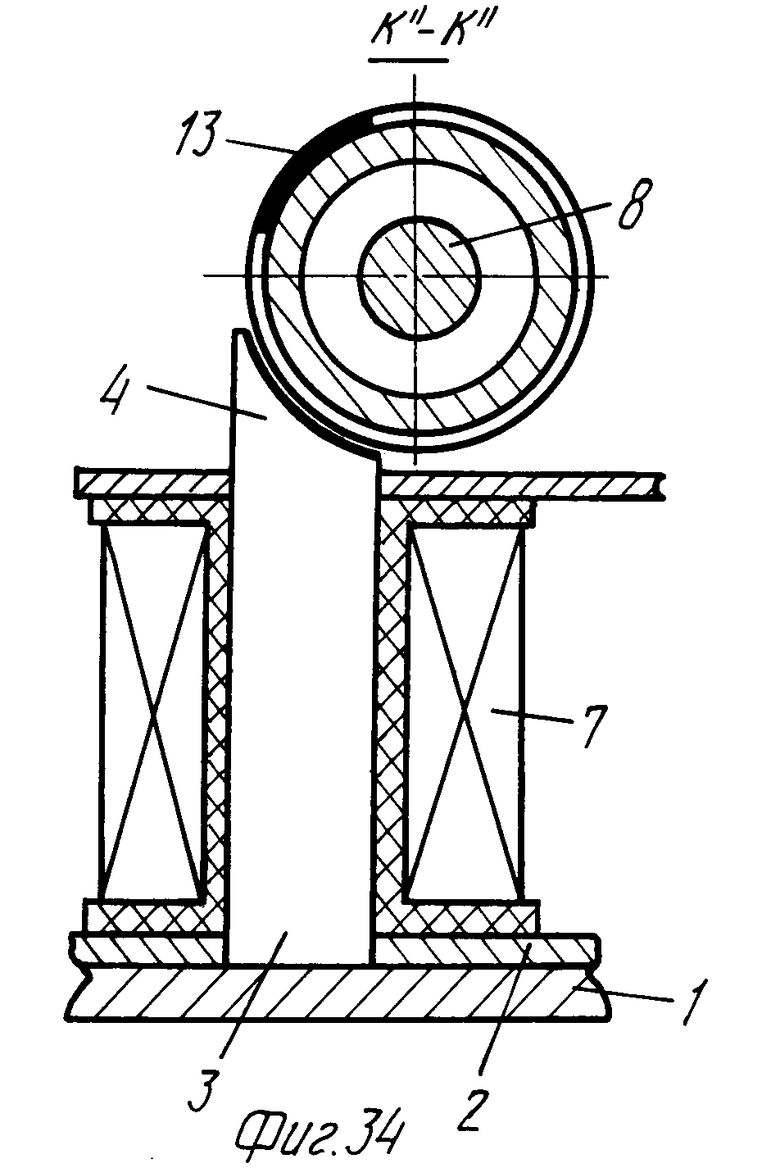
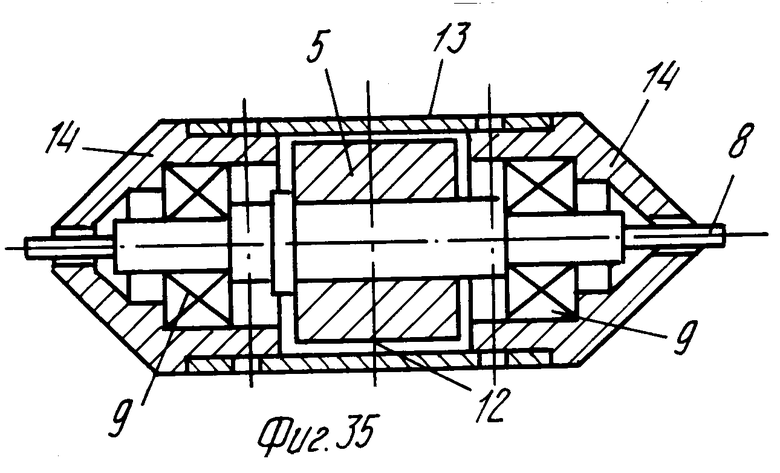
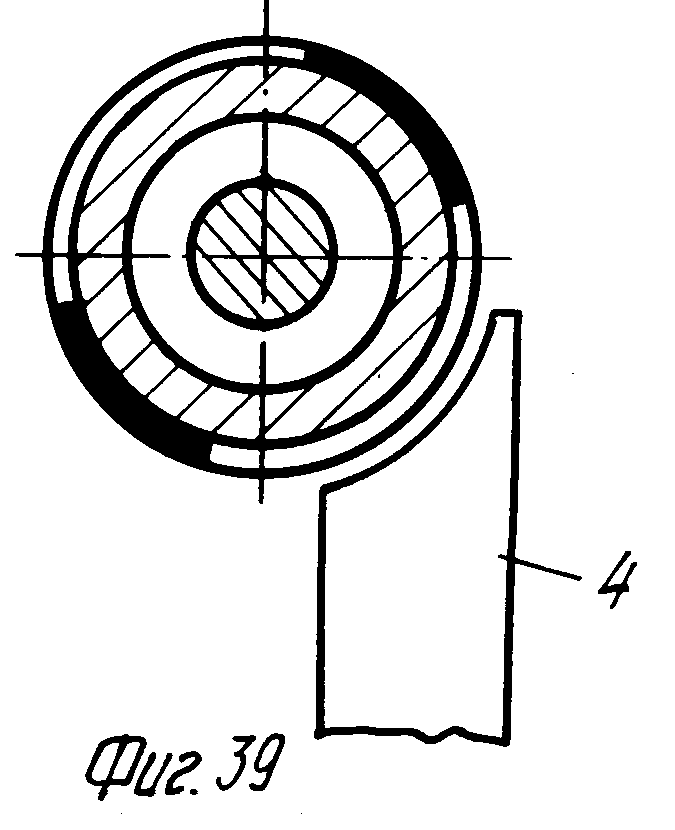
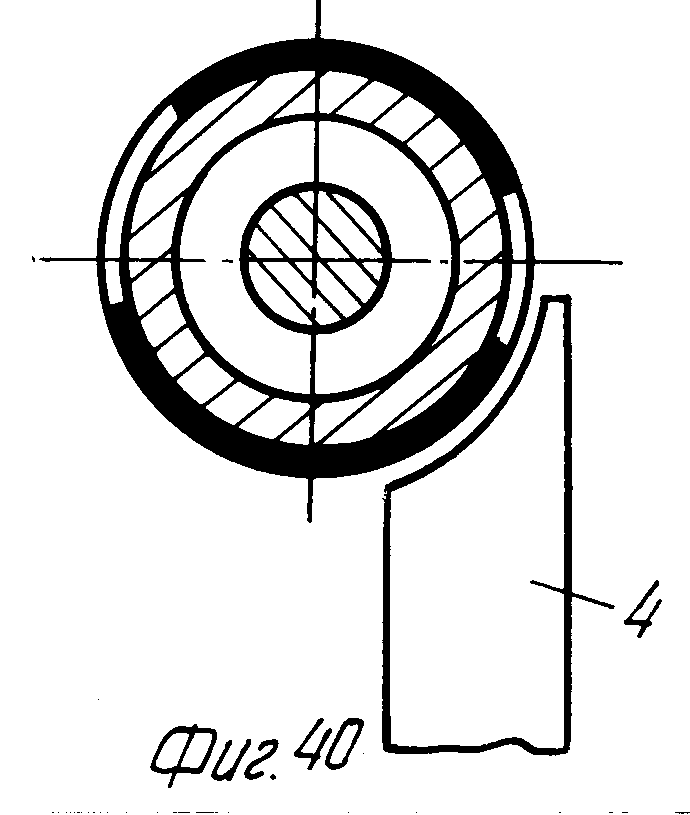
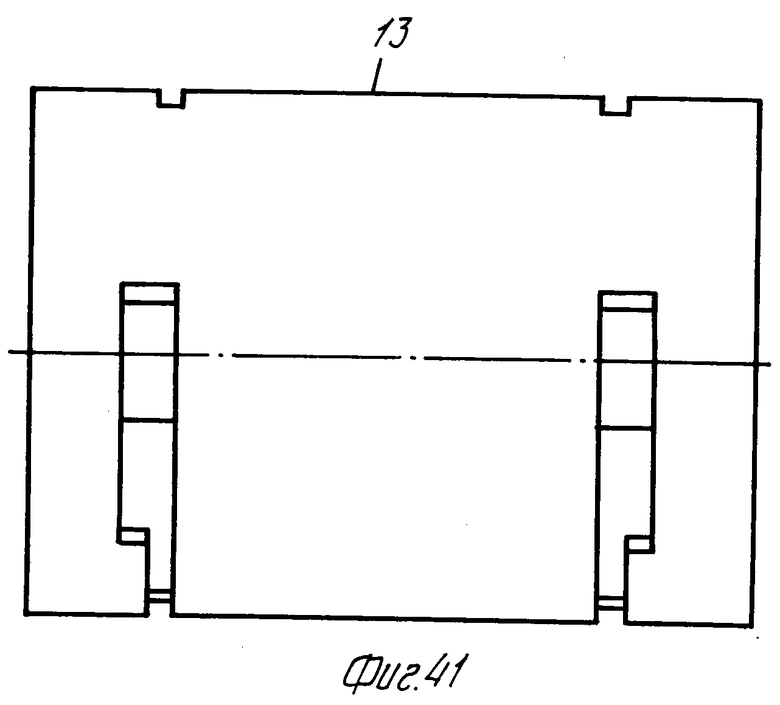
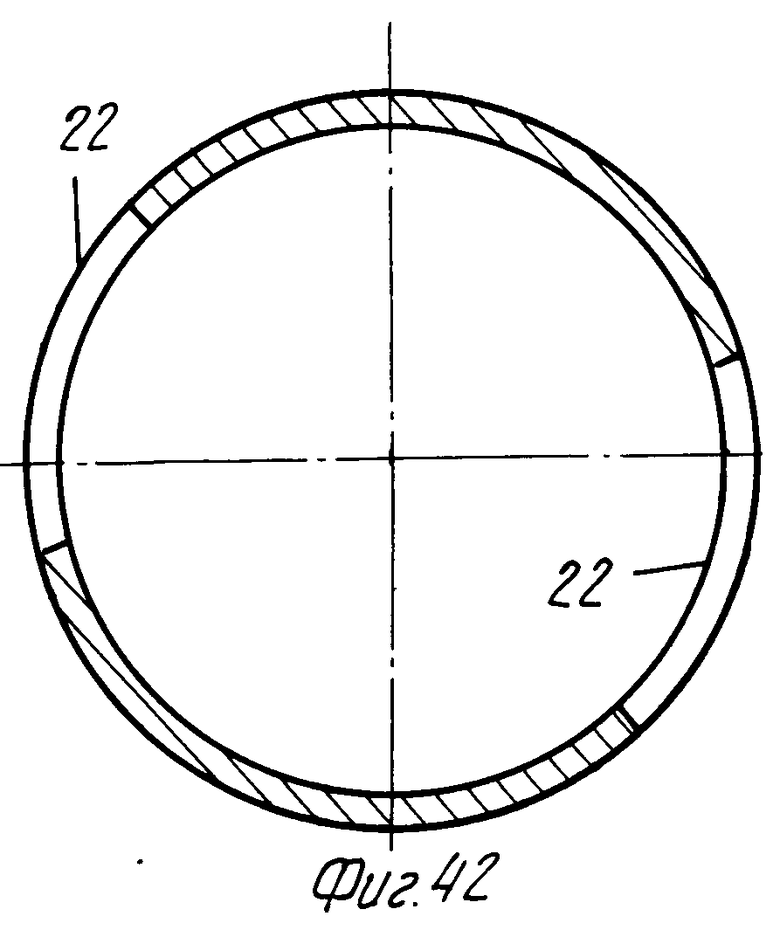
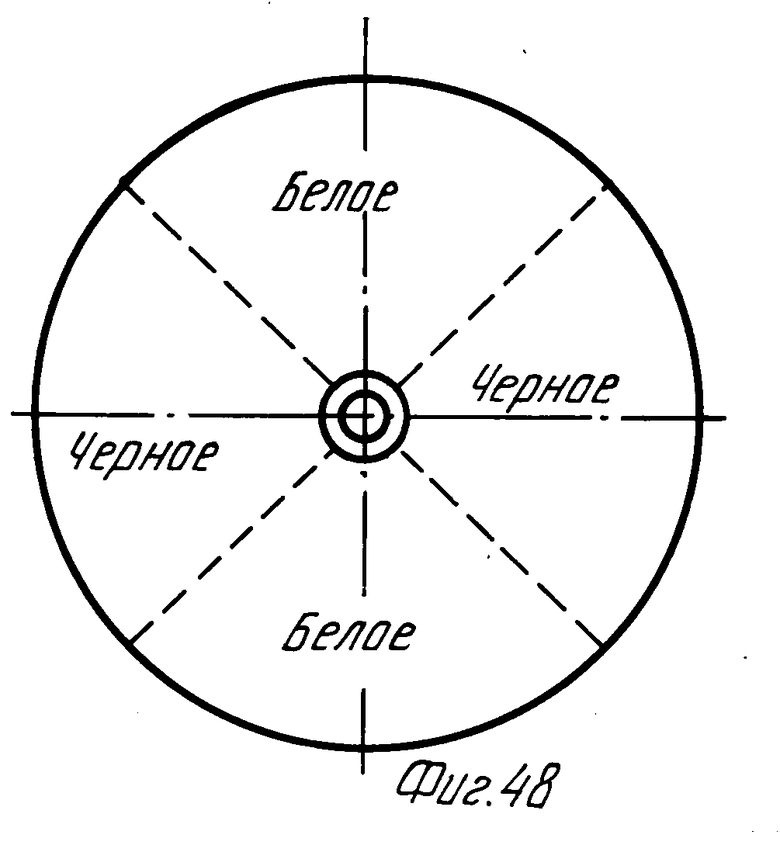
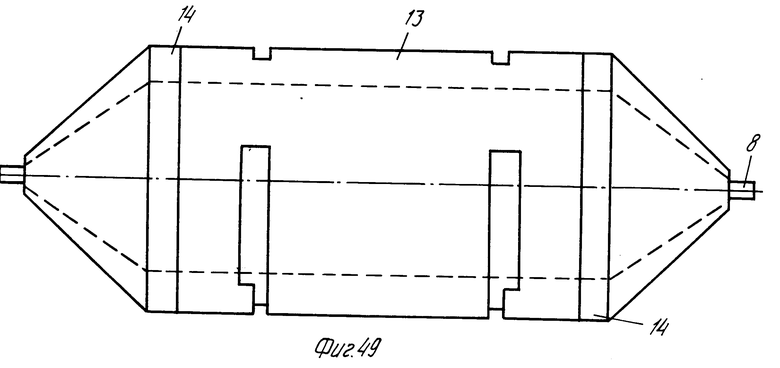
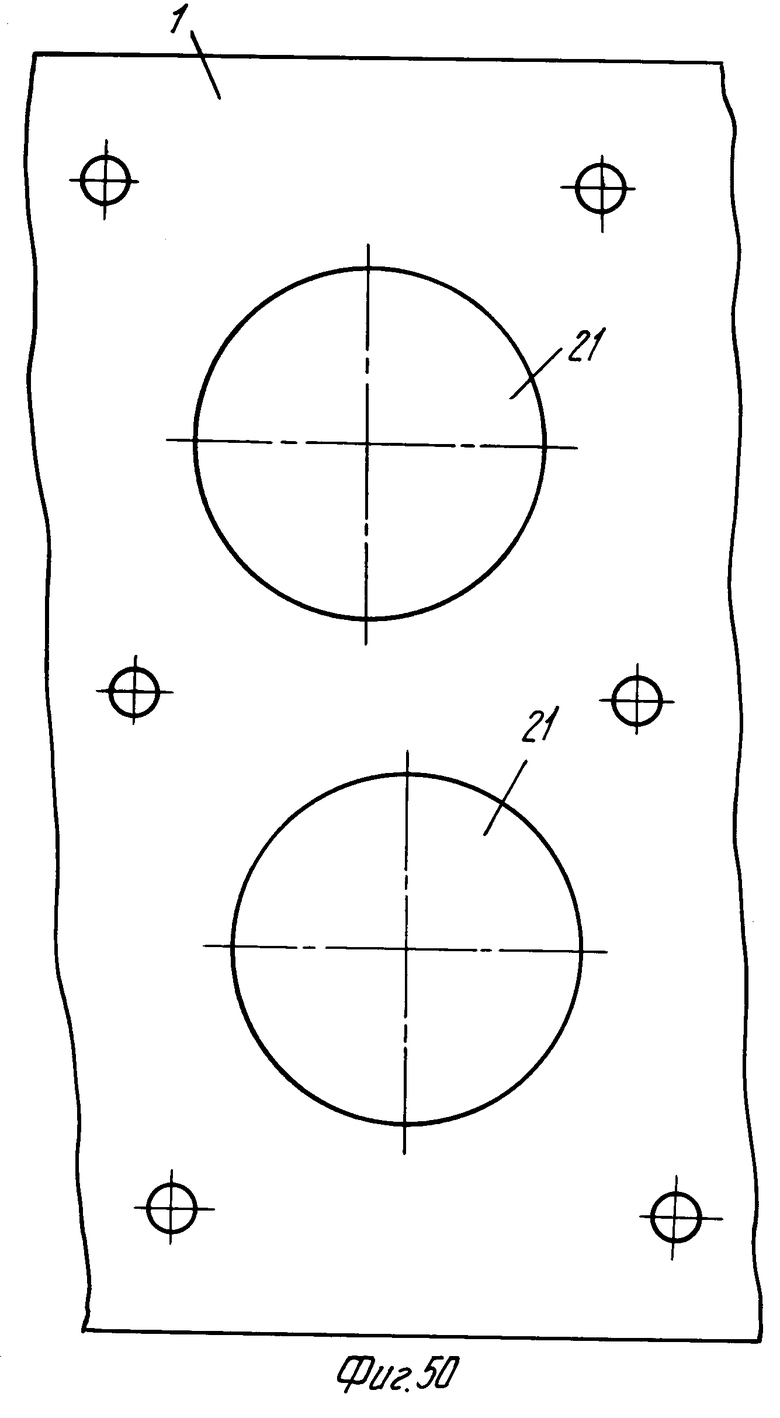
На фиг. 28 пластина магнитопровода для одного семибленкерного знакоместа; на фиг. 29 пластина с семью парами катушек управления; на фиг. 30 показаны зафиксированные катушки; на фиг. 31 валы с роторами на стойках, укрепленных на магнитопроводе и корпусе; на фиг. 32 разрез К-К на фиг. 31; на фиг. 33 разрез К'-K' на фиг. 32; на фиг. 34 разрез K''-K'' на фиг. 32; на фиг. 35-40 пояснение размещения ротора и статора; на фиг. 41-45 пояснение выполнения роторных полюсов; на фиг. 46, 47 пояснение принципа действия; на фиг. 48, 49 пояснение окраски подвижной части устройства; на фиг. 50 расположение подмагничивающих магнитов на статоре.
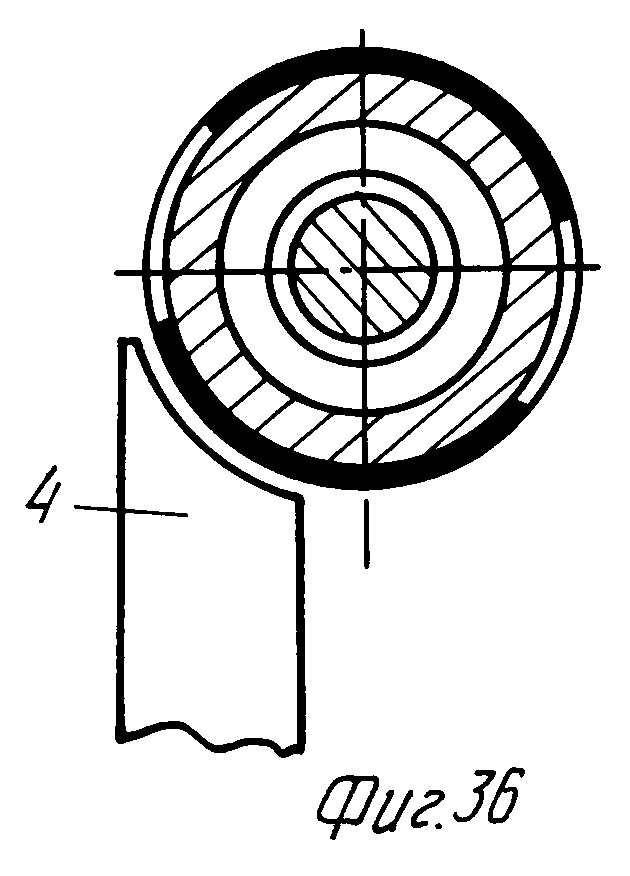
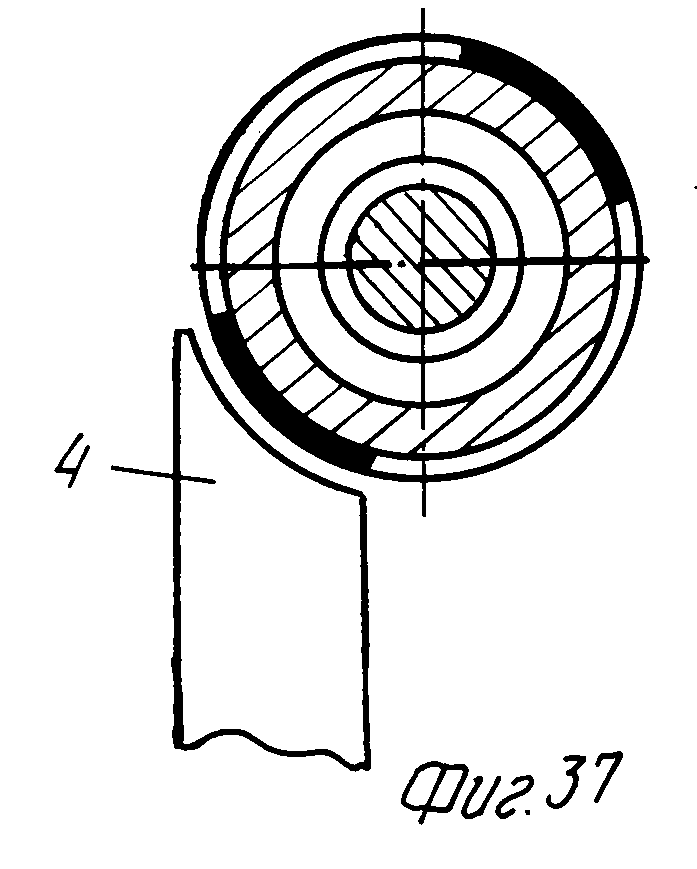
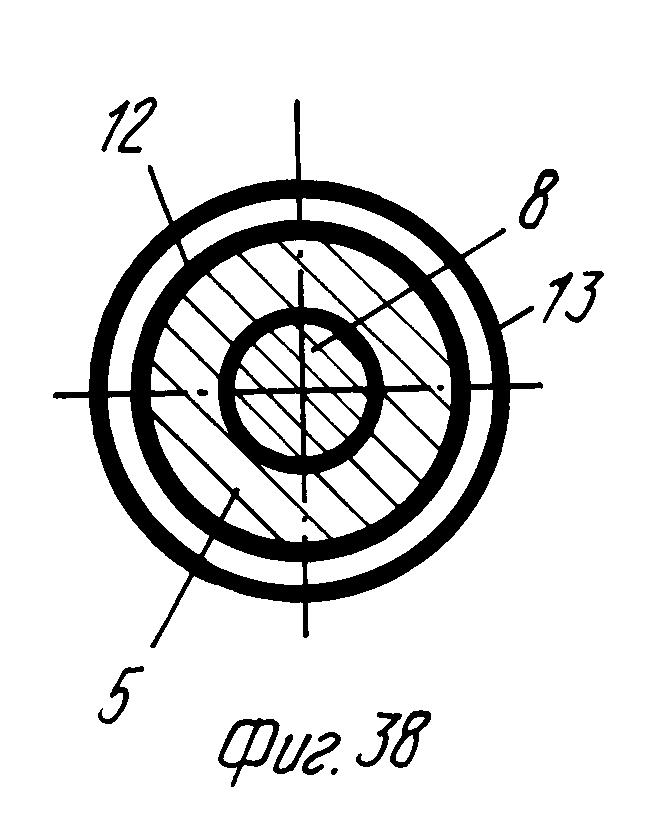
На немагнитном основании корпусе 1 установлена штампованная пластина магнитопровода 2 с выступающими стержнями 3, имеющими полюсные наконечники 4 с угловой протяженностью в треть полюсного деления двухполюсного полого пассивного ротора, подмагниченного со стороны эквипотенциальной боковой поверхности цилиндрического магнита 5, выполненного с радиальным намагничиванием (поз. 12 эквипотенциальная поверхность магнита).
Оси попарно включенных катушек 7 расположены по разные стороны от оси несущего упомянутый магнит 5 неподвижного вала 8. На валу 8 установлены опоры 9 вращения (предпочтительно подшипники) для ротора 13, который любым известным способом укреплен на боковых поверхностях немагнитных крышек 14 (например, из алюминия, пластмассы и т.п.).
Для ориентации и фиксации валов 8 служат специальные стойки 10 (их шесть, см. фиг. 31, 32). Винты 15, 16 и колонки 17, 18 служат для ориентации и фиксации специальной пластины 19, которая ограничивает возможность смещения катушек и, кроме того, повышает точность ориентации наконечников 4 стержней 3 в заданном положении.
В пластине 19 предусмотрены шесть отверстий для установки стоек 10 с валами 8, несущими магниты-индукторы 5 и роторы 13 с крышками 14.
Для декоративности предусмотрена пластина 11, после установки которой, например, как показано на фиг. 32, можно получить визуальное изображение (см. фиг. 10).
При этом в отверстиях корпуса 1 (см. фиг. 50) с противоположной катушкам 7 и стойкам 10 стороны установлены магниты 21, прилегающие к торцу магнитопровода 2 полюсом с полярностью, противоположной полярности эквипотенциальных поверхностей 12 магнитов 5.
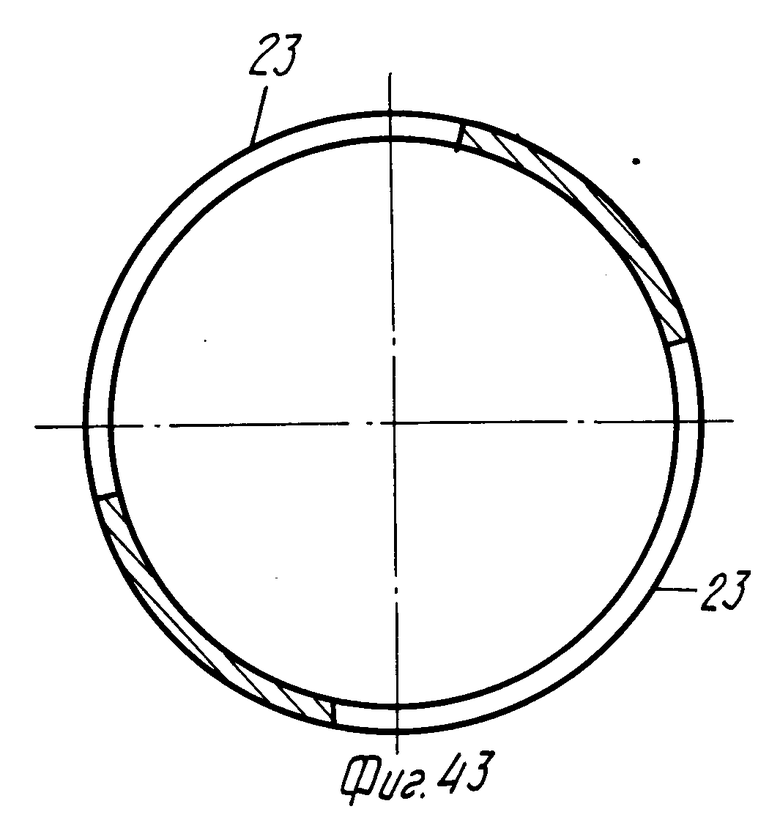
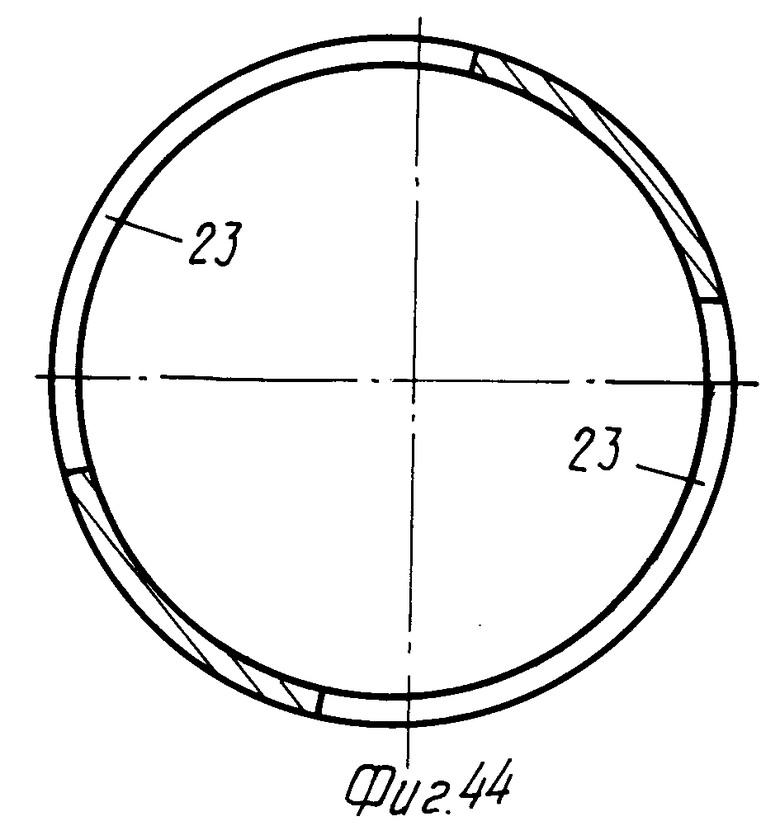
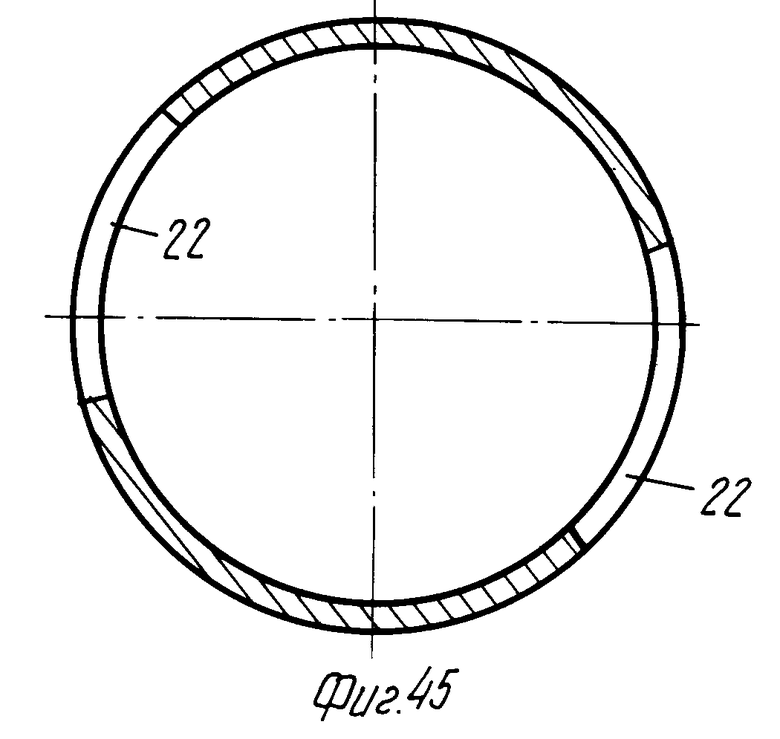
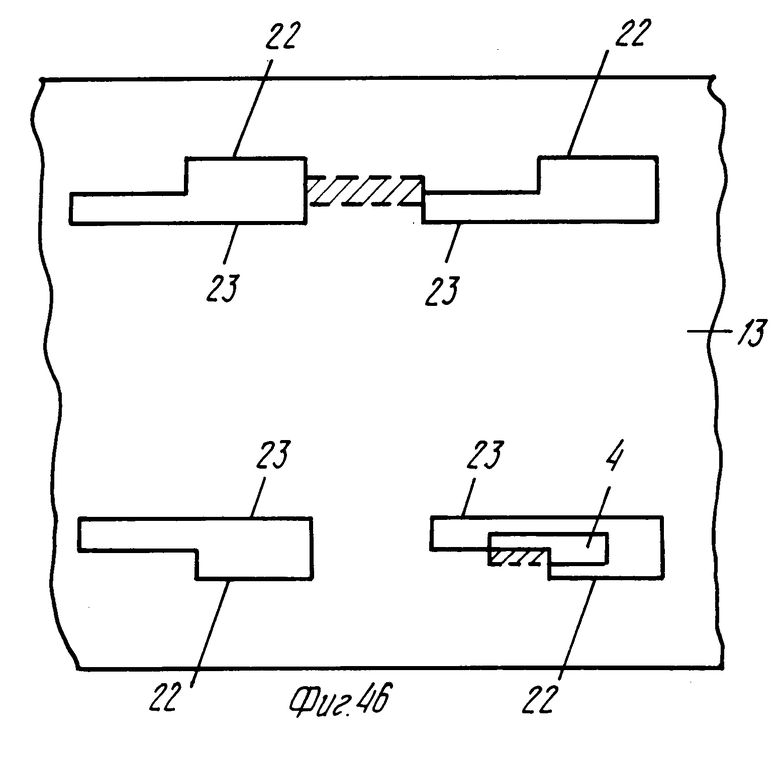
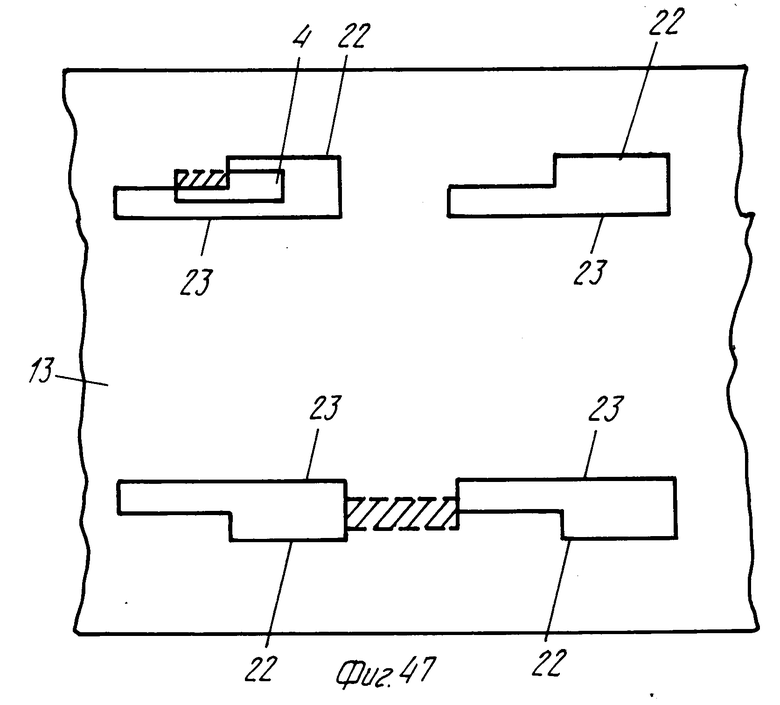
Благодаря наличию на роторах 13 цилиндрических полюсов, выполненных специальными вырезами 22 с угловой протяженностью в треть полюсного деления и вырезами 23 с угловой протяженностью в две трети зубцового деления, каждый ротор при отсутствии тока занимает одно из четырех фиксированных положений относительно наконечников 4 стержней 3 магнитопровода 2.
С появлением импульса тока соответствующей полярности возникает комбинированный индукторно-реактивный момент, под действием которого ротор совершает шаг в четверть оборота и фиксируется в новом положении (т.е. переходит из положения по фиг. 46 в положение по фиг. 47, где магнитные потоки от поляризующих полюсов магнитов 5, 21 и от магнитодвижущей силы (МДС) управления катушек 7 складываются в зазоре того наконечника 4, который перекрывает поверхность полюса на роторе на наибольшей площади (см. штриховку на фиг. 47).
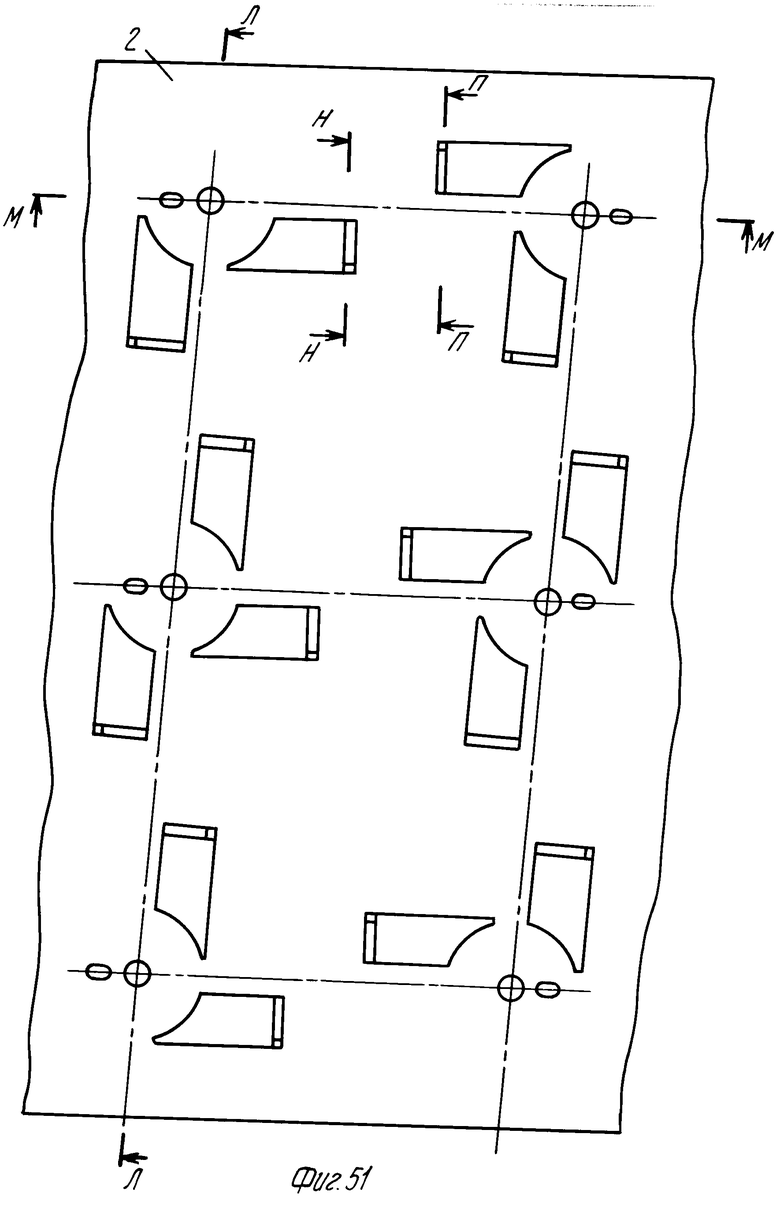
Четвертая модификация изобретения представлена на фиг. 51-66.
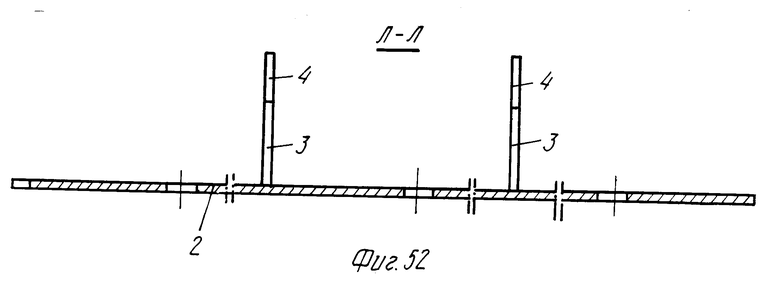
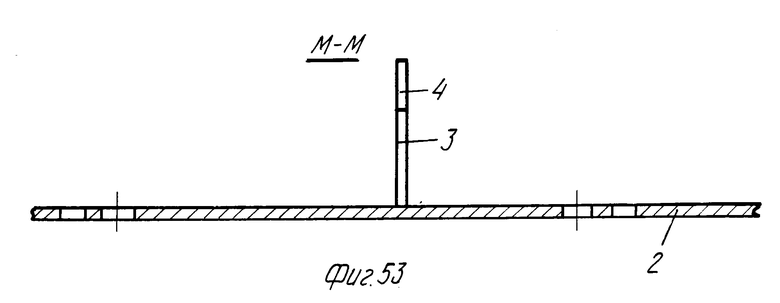
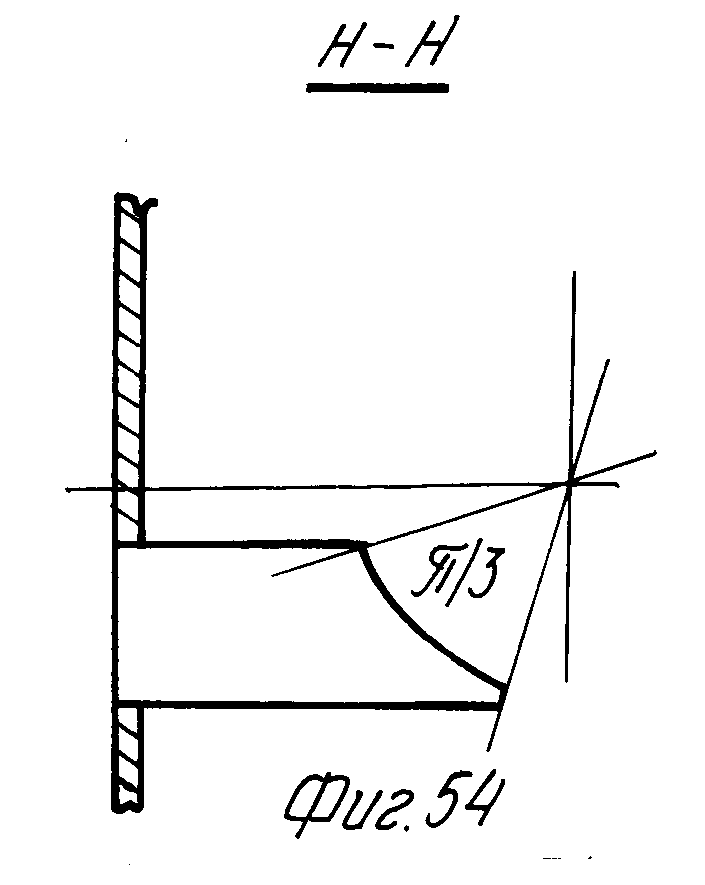
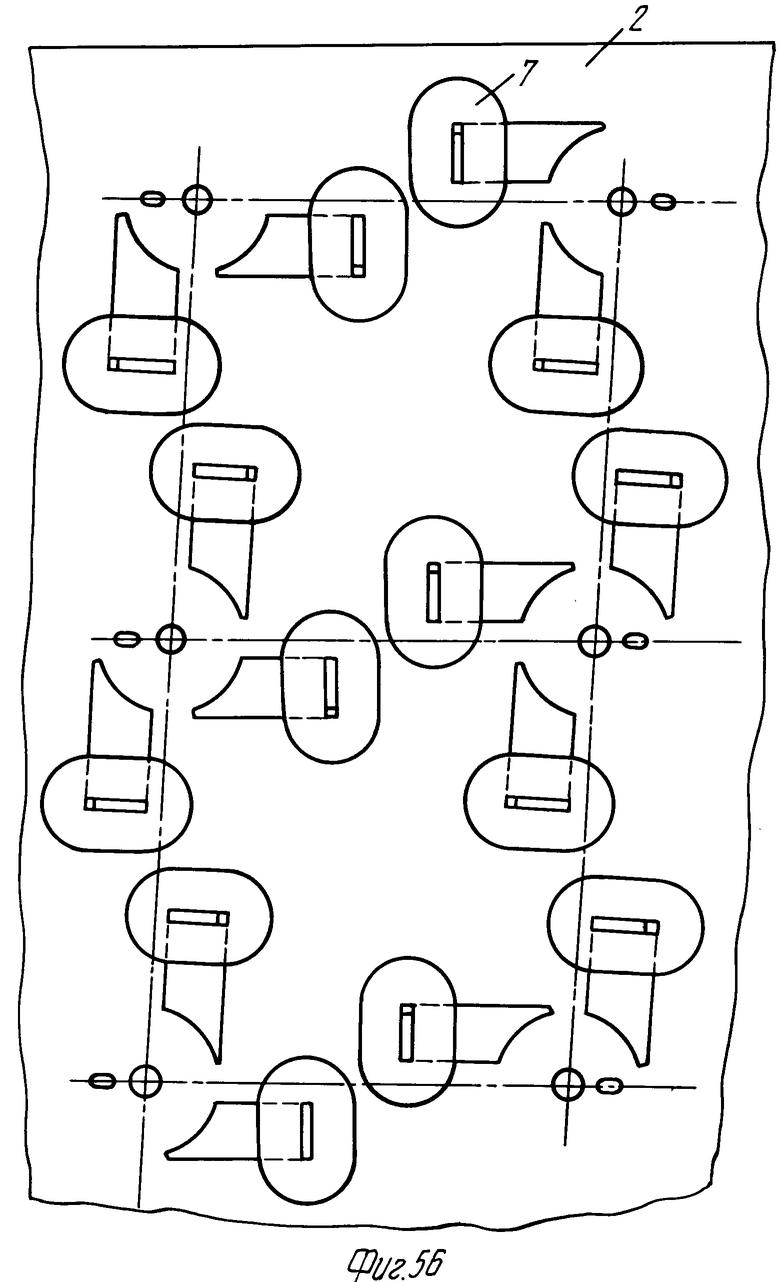
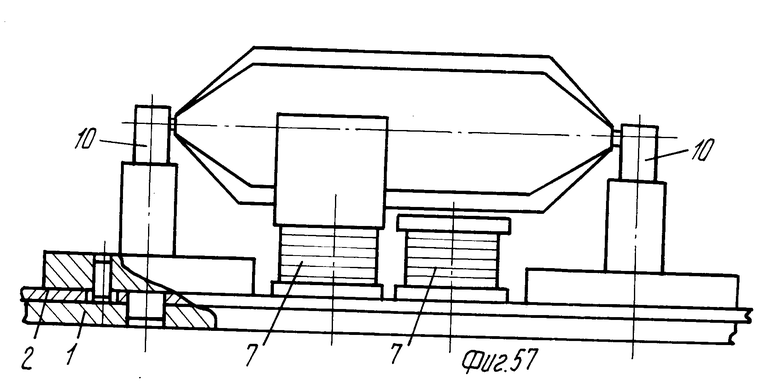
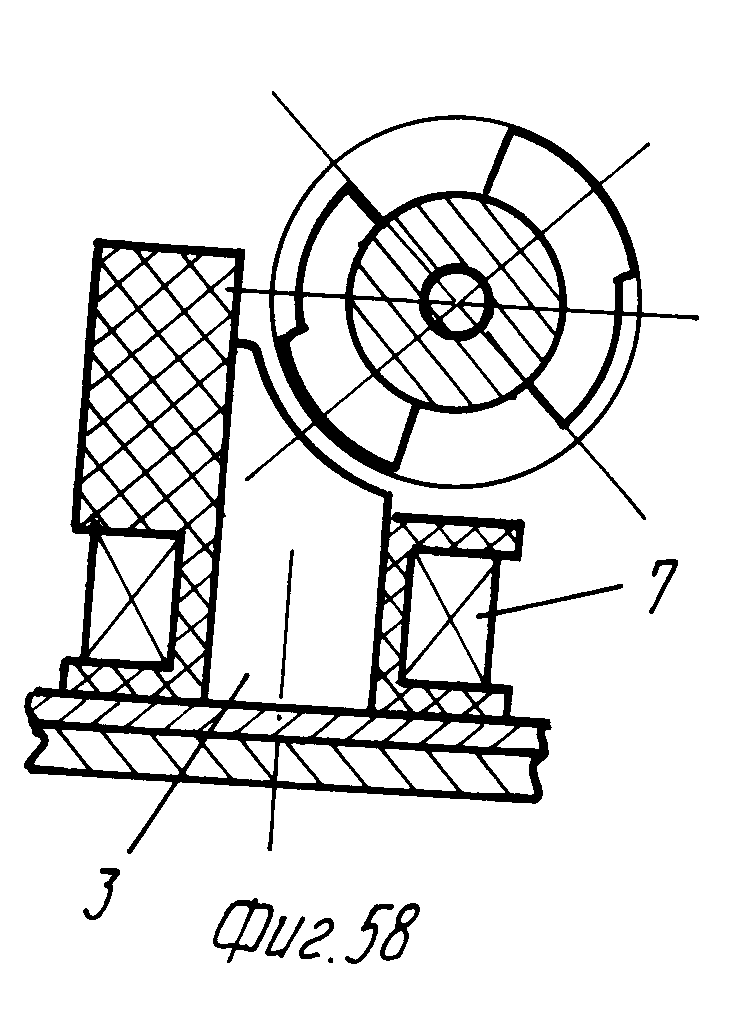
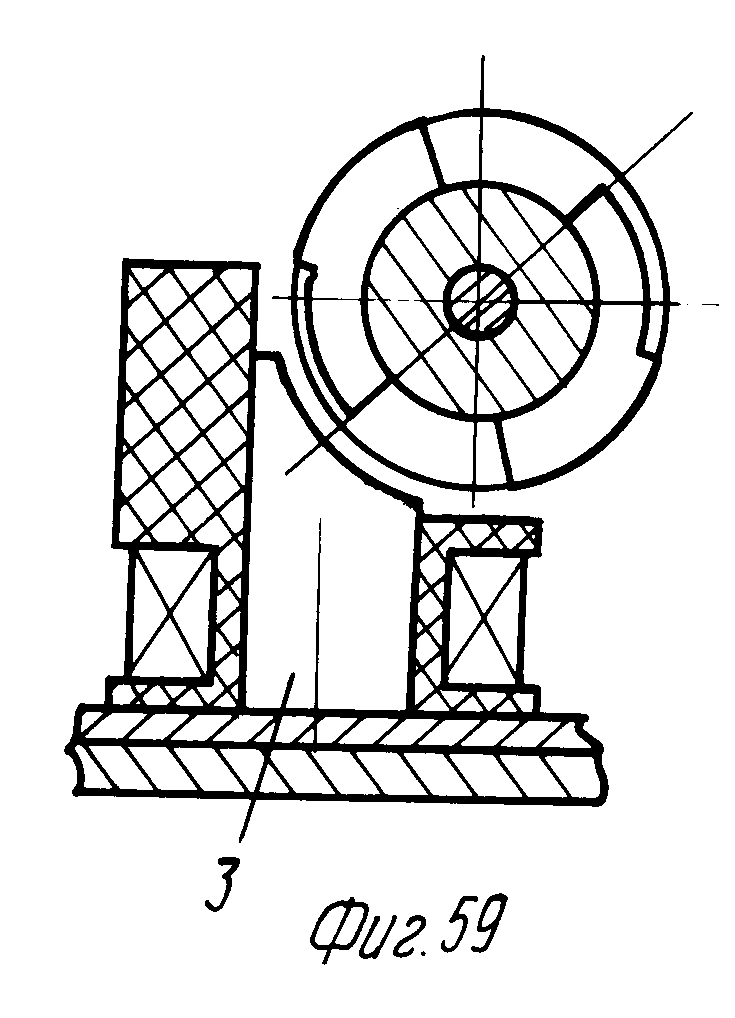
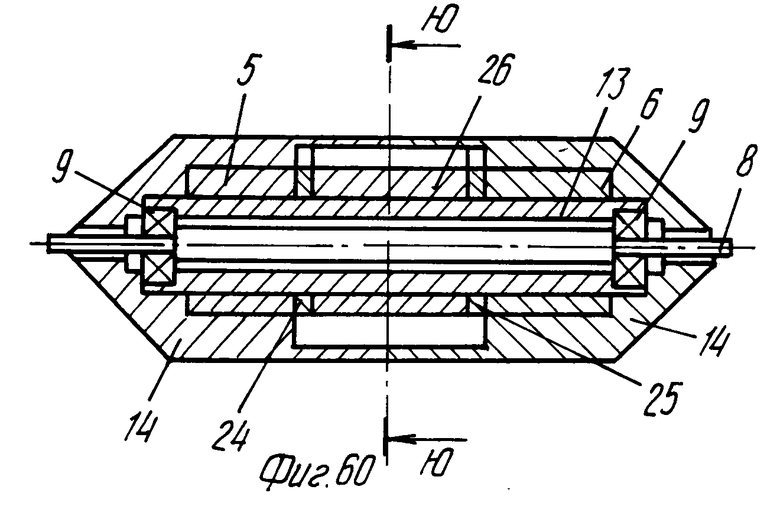
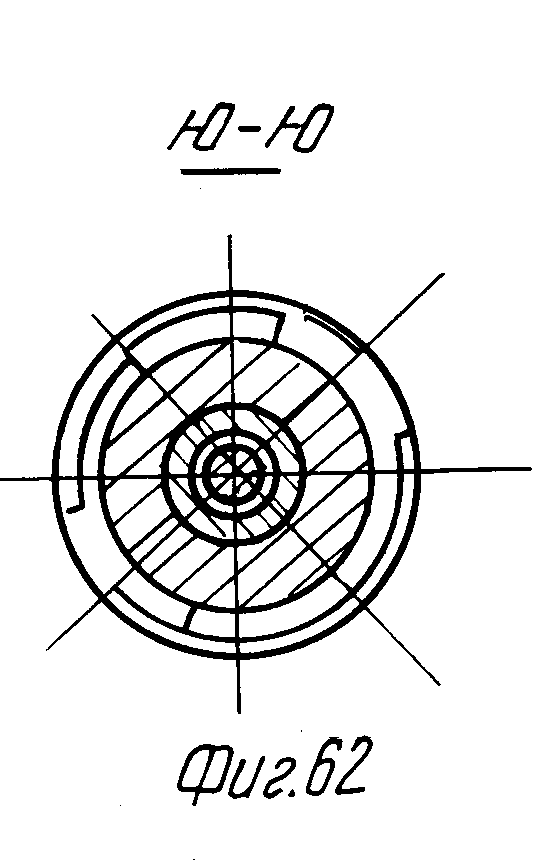
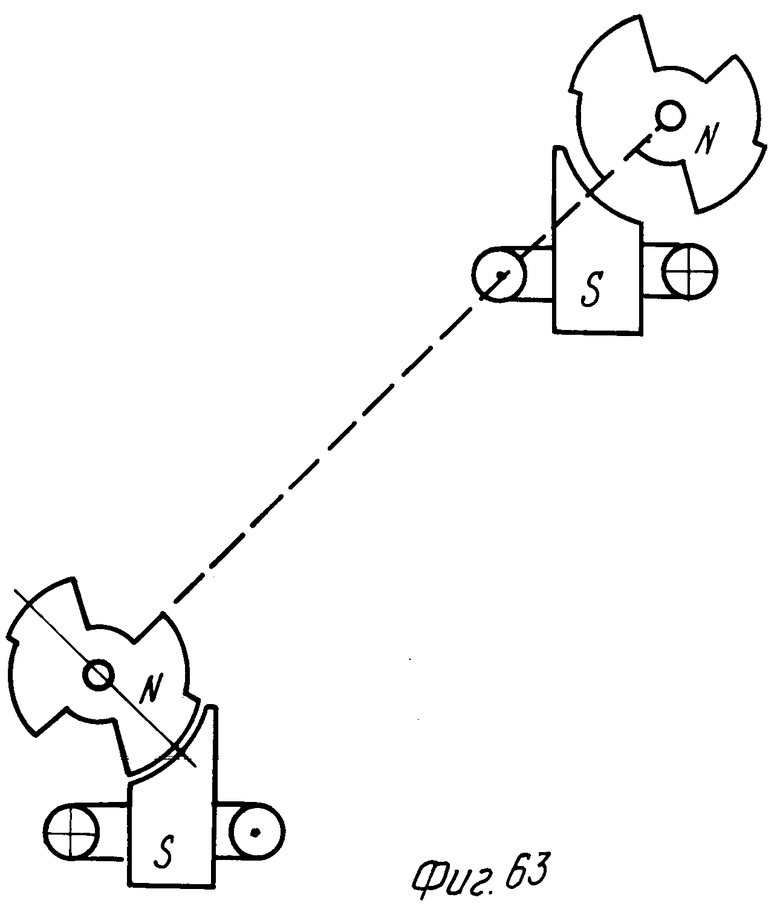
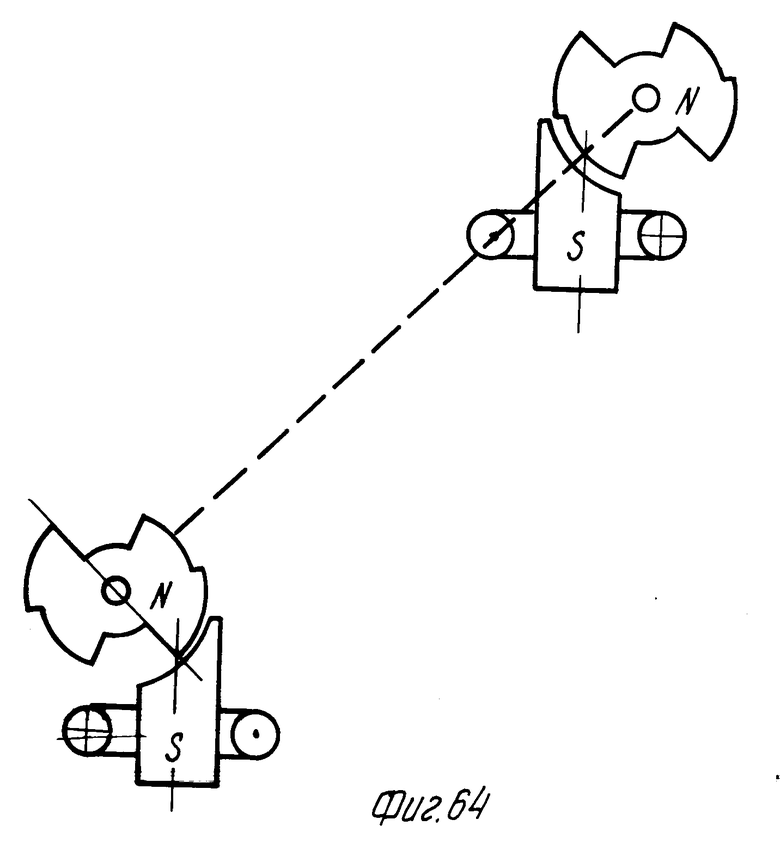
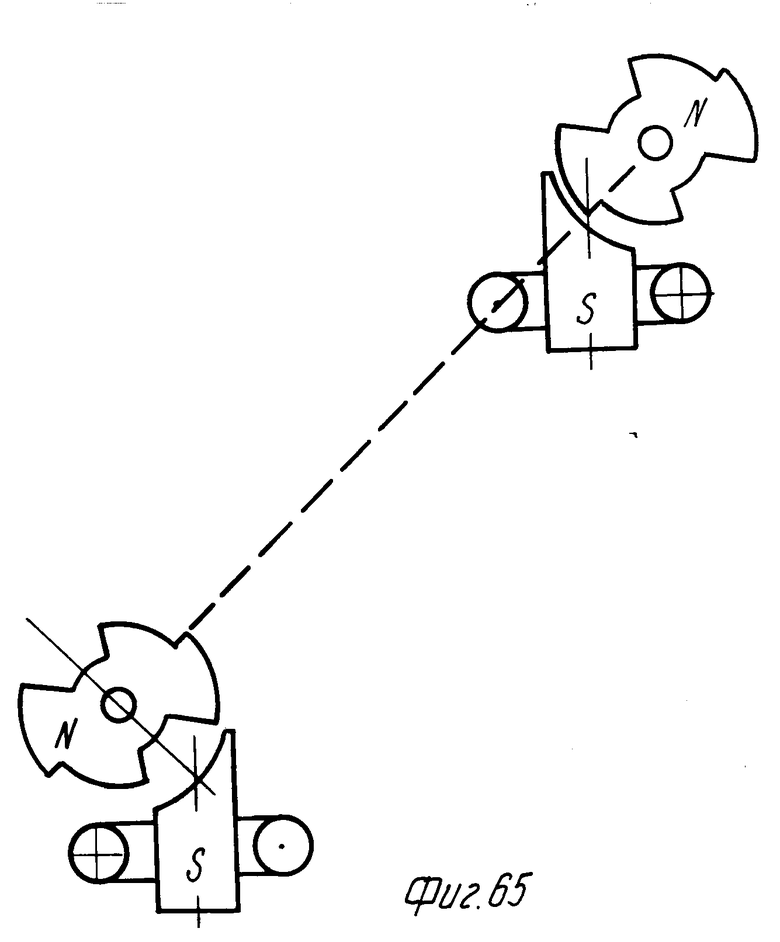
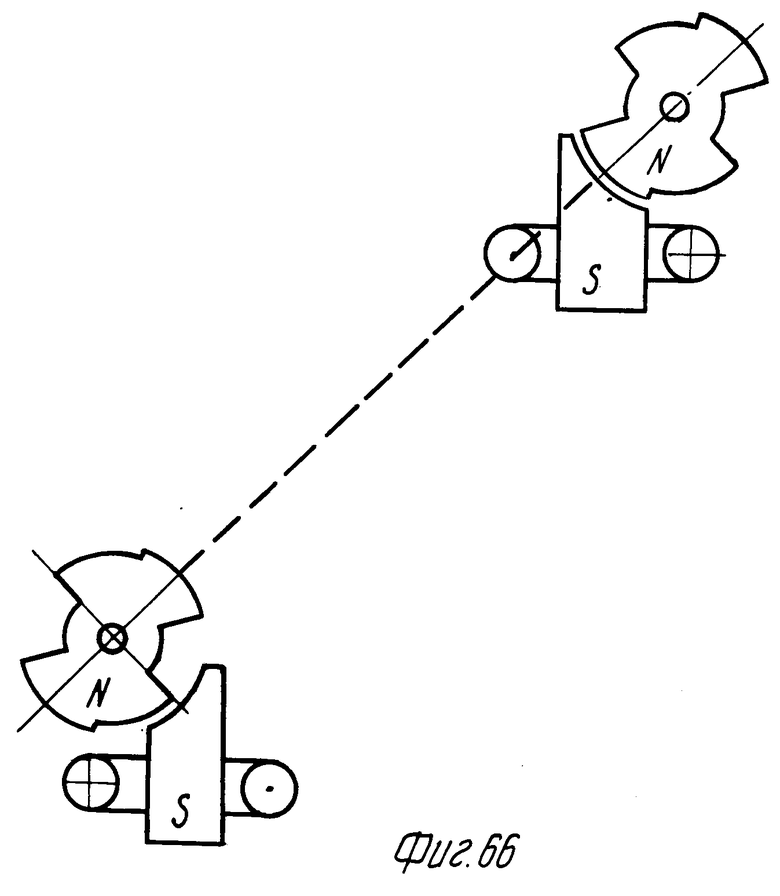
На фиг. 51 магнитопровод; на фиг. 52 разрез Л-Л на фиг. 51; на фиг. 53 разрез М-М на фиг. 51; на фиг. 54 разрез Н-Н на фиг. 1; на фиг. 55 разрез П-П на фиг. 51. на фиг. 56 положение катушек на магнитопроводе; на фиг. 57 положение ротора, вид сбоку; на фиг. 58 и 59 условное положение наконечников и роторных дисков; на фиг. 60 ротор на оси; на фиг. 61 ротор, вид с торца; на фиг. 62 разрез Ю-Ю на фиг. 60; на фиг. 63-66 пояснение принципа действия. На фиг. 10 изображение бленкерное.
На немагнитном корпусе 1 установлен плоский магнитопровод 2 с отогнутыми стержнями 3, заканчивающимися наконечниками 4 с угловой протяженностью в шестую часть дуги окружности.
Двухзубцовые диски 24 и 25 установлены параллельно с одинаковыми расстояниями оси вращения от осей согласно включенных попарно катушек 7.
Вал 8 может быть выполнен неподвижным и установлен в опорах 9 вращения (предпочтительно подшипниках) с закреплением концов в стойках 10, установленных на торцах магнитопровода 2.
Соединяющая диски 24 и 25 в магнитном отношении втулка 26 может быть установлена на боковой поверхности полого немагнитного цилиндра-ротора 13, на котором укреплены крышки-части 14 (из немагнитного материала). Магниты 5 и 6 имеют встречное намагничивание. При подвижном выполнении вала 8 в опорах стоек 10 возможно выполнение дисков 24 и 25 за одно целое с элементом 26 (см. фиг. 58, 59).
Магниты (не показаны), подмагничивающие магнитопровод с полярностью, обратной полярности прилегающих к торцам дисков 24 и 25 полюсов магнитов 5 и 6, прилегают к торцу магнитопровода 2. Они могут быть установлены, например, между катушками 7 (см. фиг. 56) с обратной стороны в отверстиях корпуса (что предпочтительнее, если не требуется уменьшать габариты), возможна установка магнитов с обоих торцов магнитопровода 2 для повышения эффекта поляризации наконечников 4 стержня 3.
При отсутствии импульса тока в катушках 7 положение дисков 24 и 25 соответствует например, показанному на фиг. 63. С появлением тока соответствующей полярности возникает индукторно-реактивный момент, под действием которого совершает поворот дисков 24 и 25 последовательно в положение по фиг. 64 и фиксируется в положении по фиг. 66.
С поступлением импульса противоположной полярности новый поворот на угол π/2.
Все семь бленкеров знакоместа управляются независимо друг от друга. С поступлением импульса в каждую пару катушек (см. фиг. 56, 57) получается изображение одной из десяти арабских цифр.
Пятая модификация исполнения индикатора показана на фиг. 67-103.
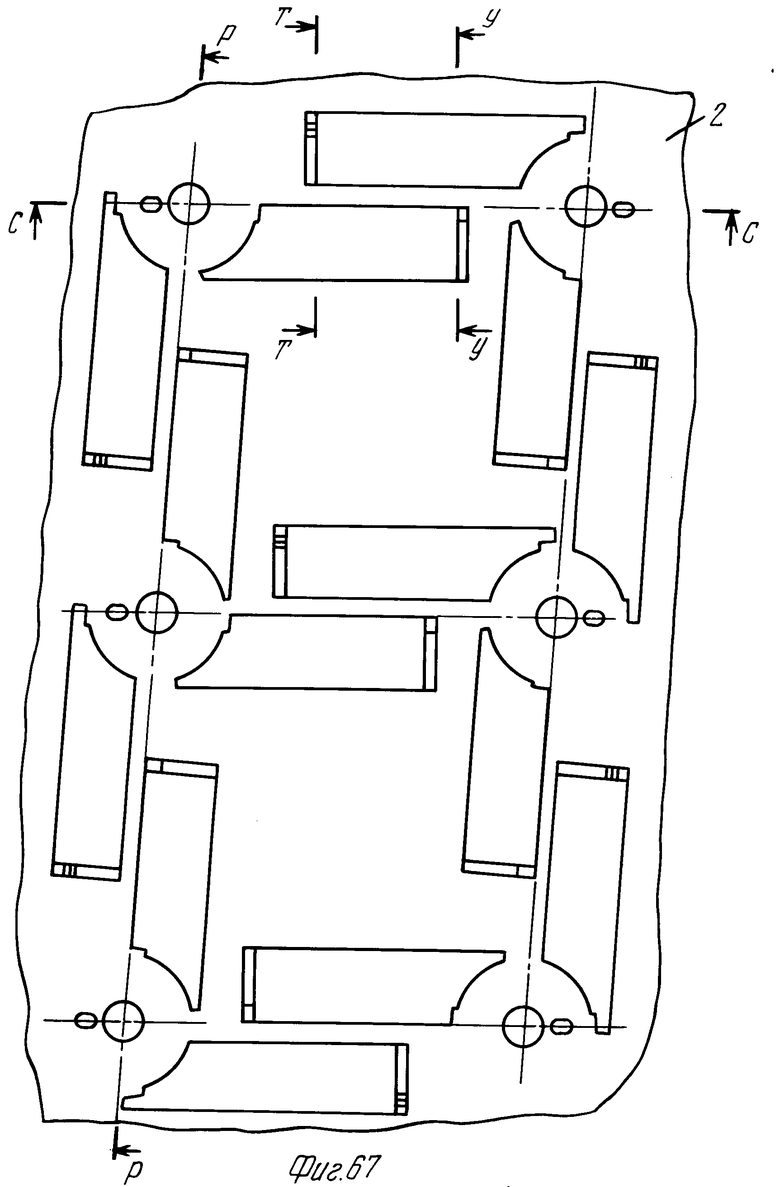
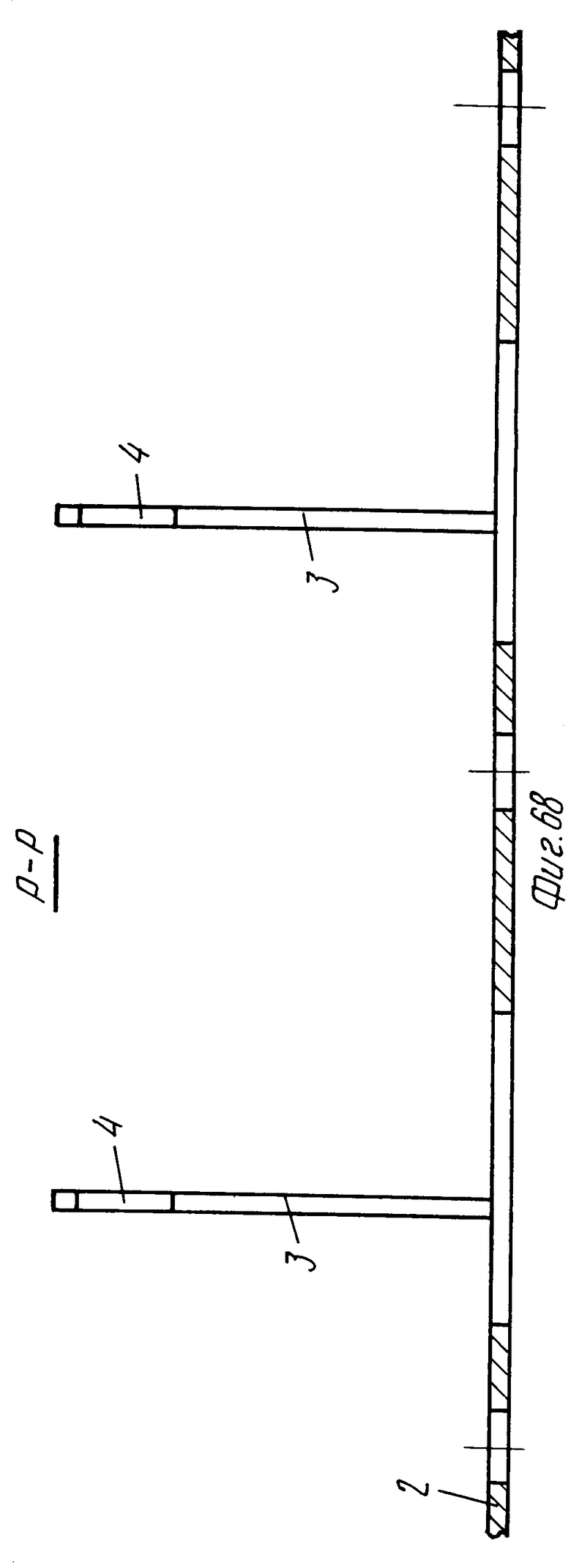
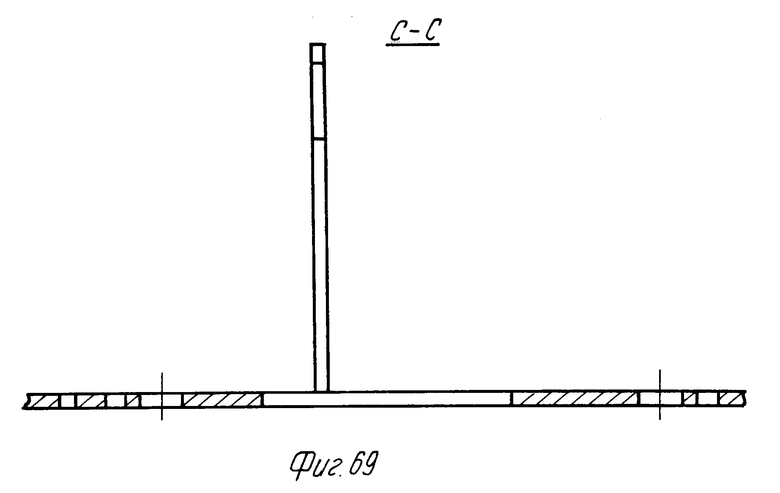
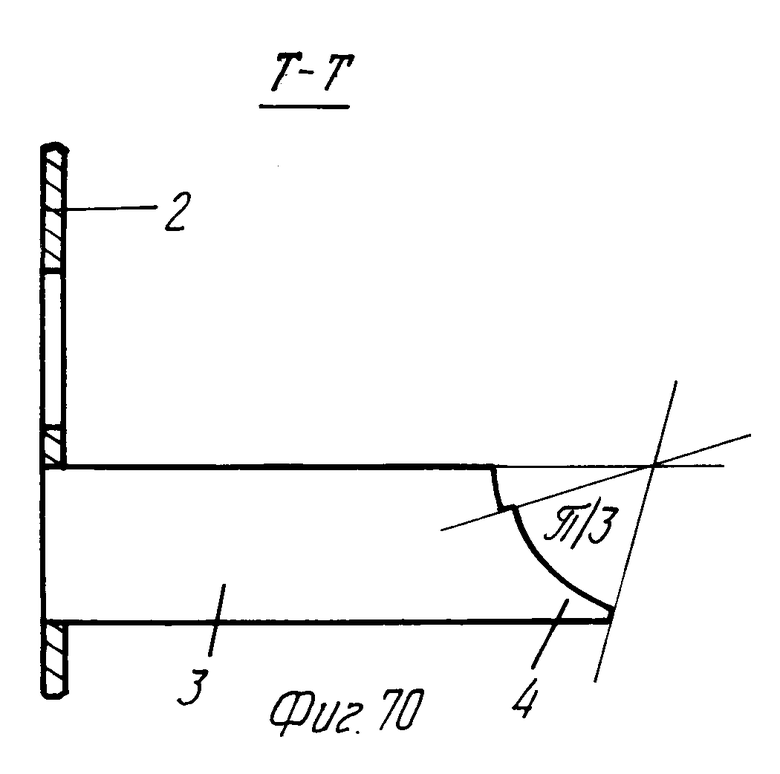
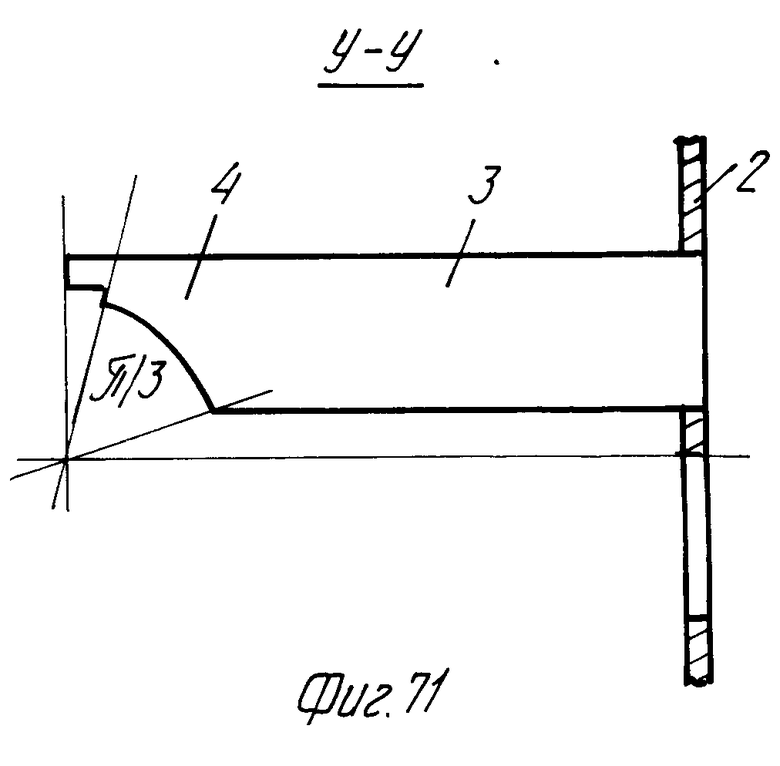
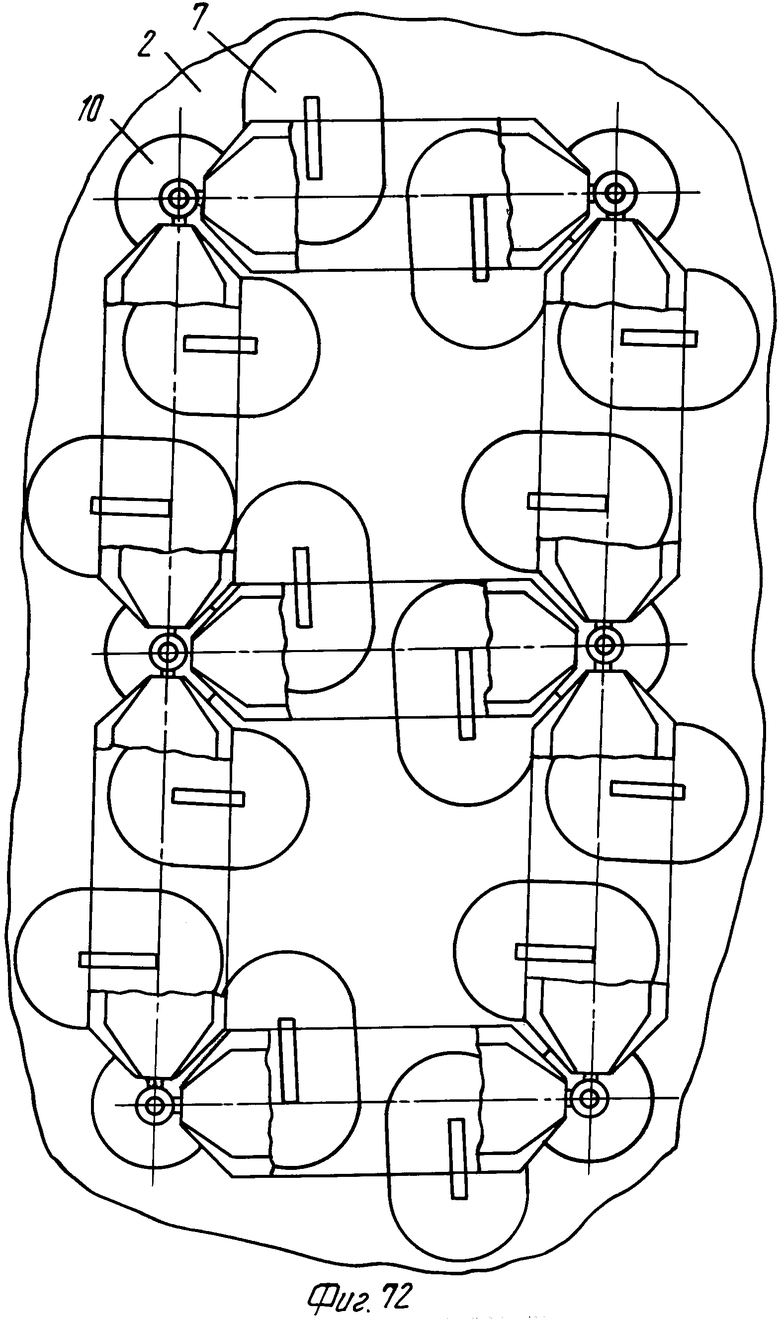
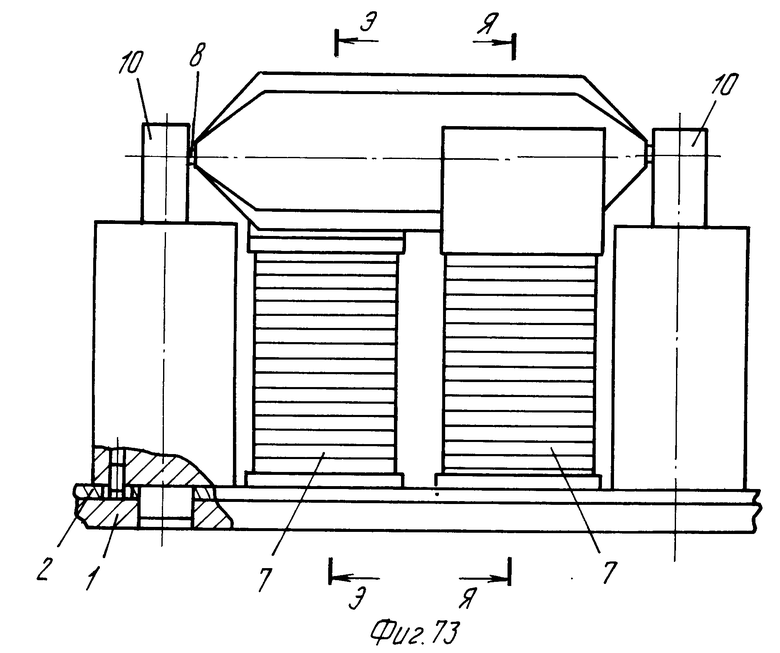
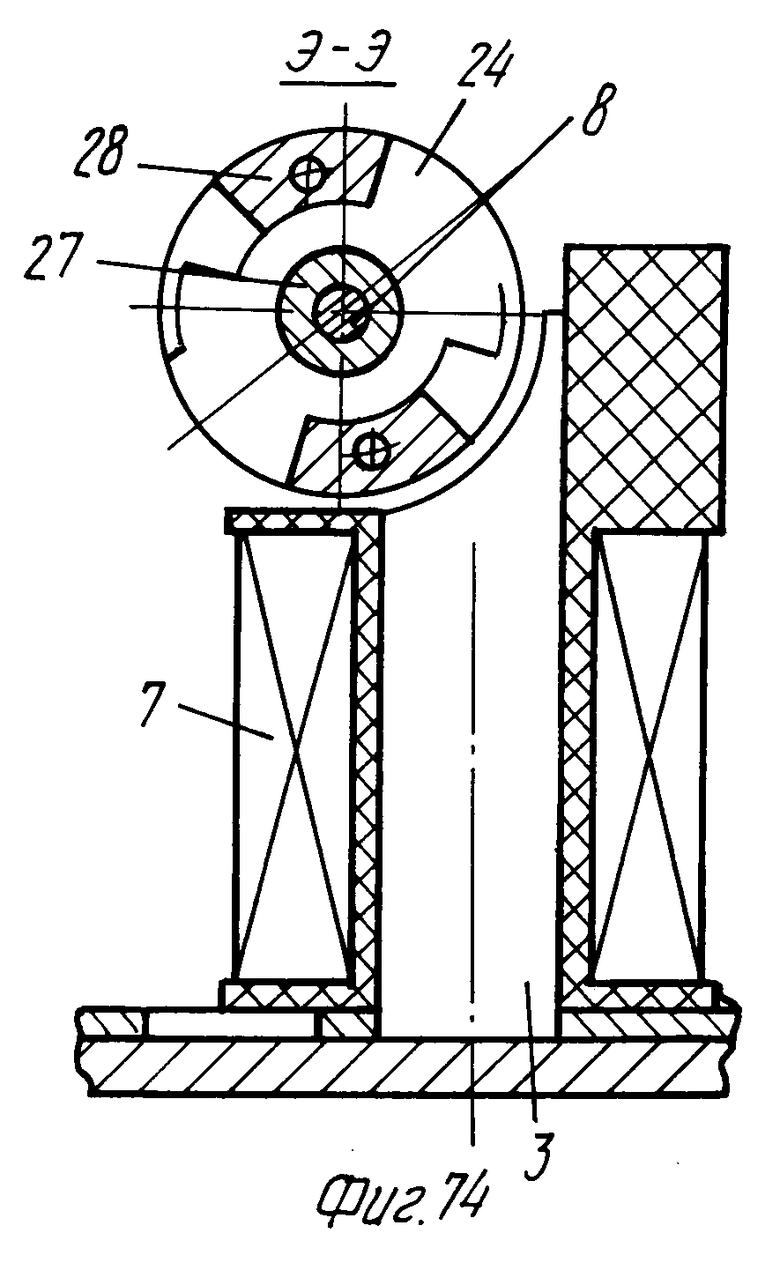
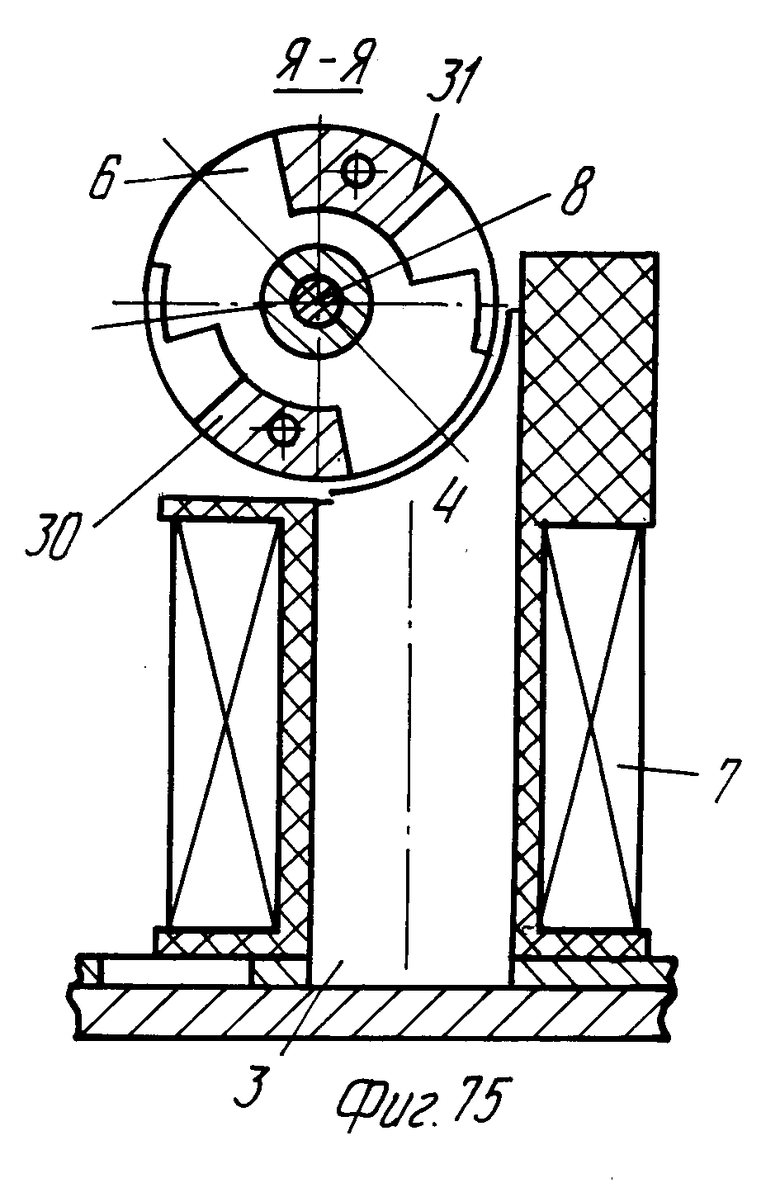
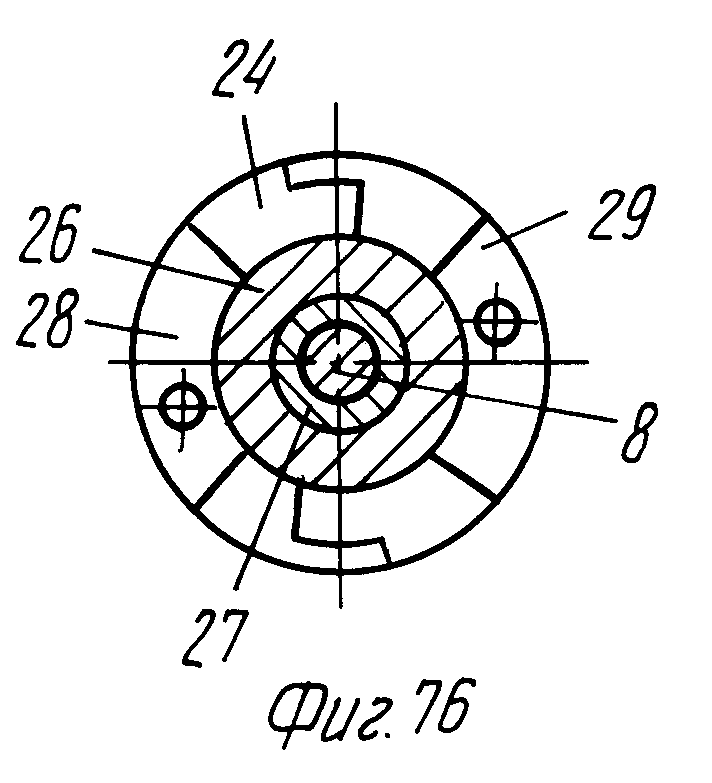
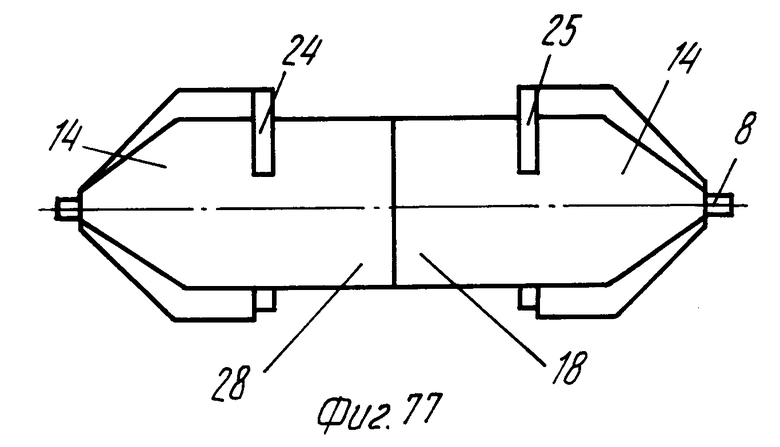
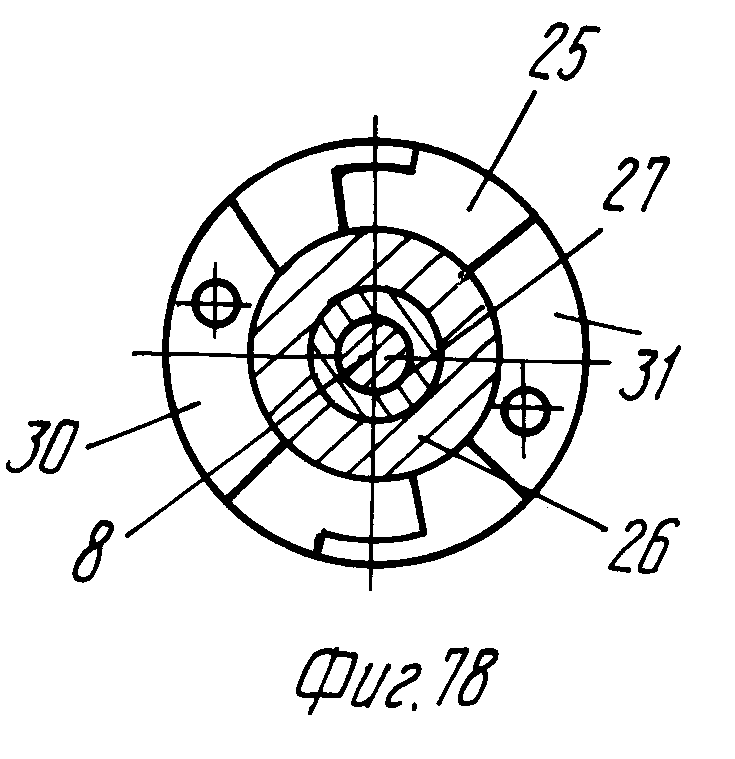
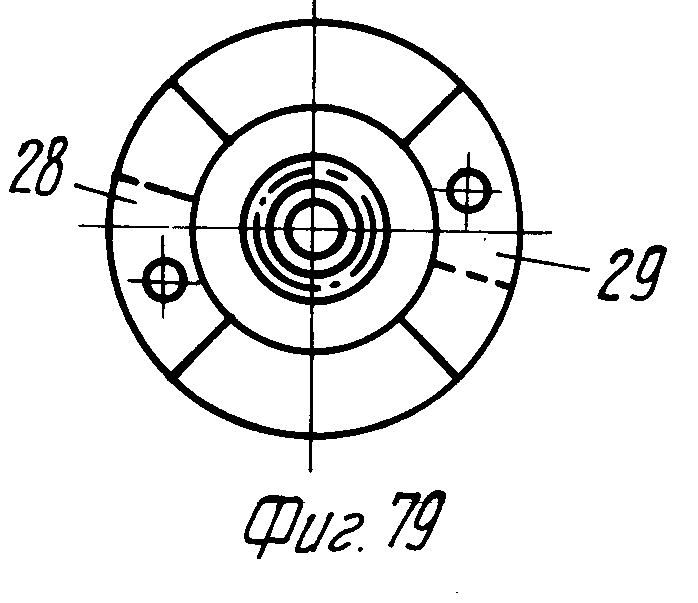
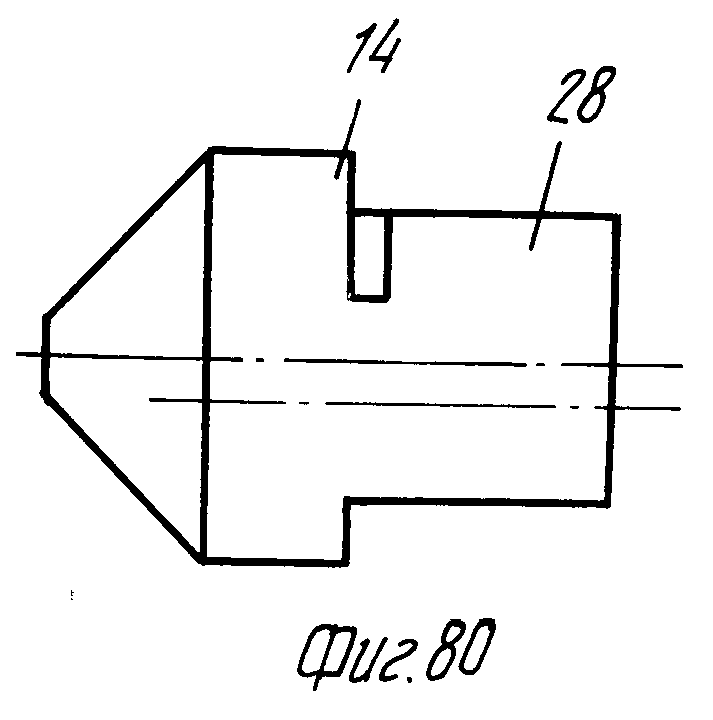
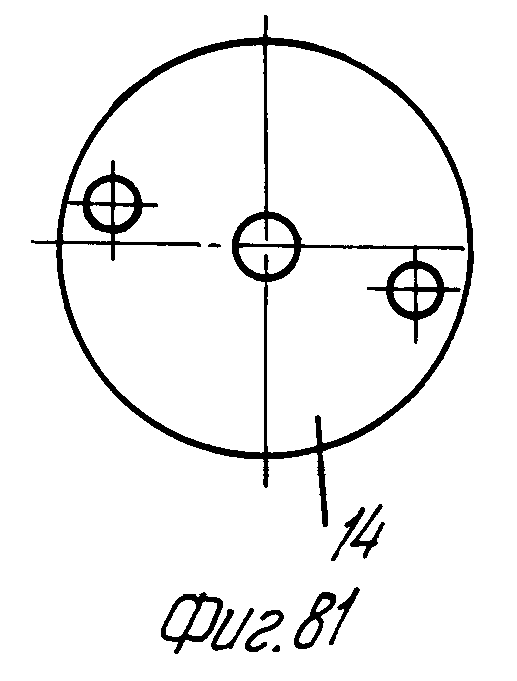
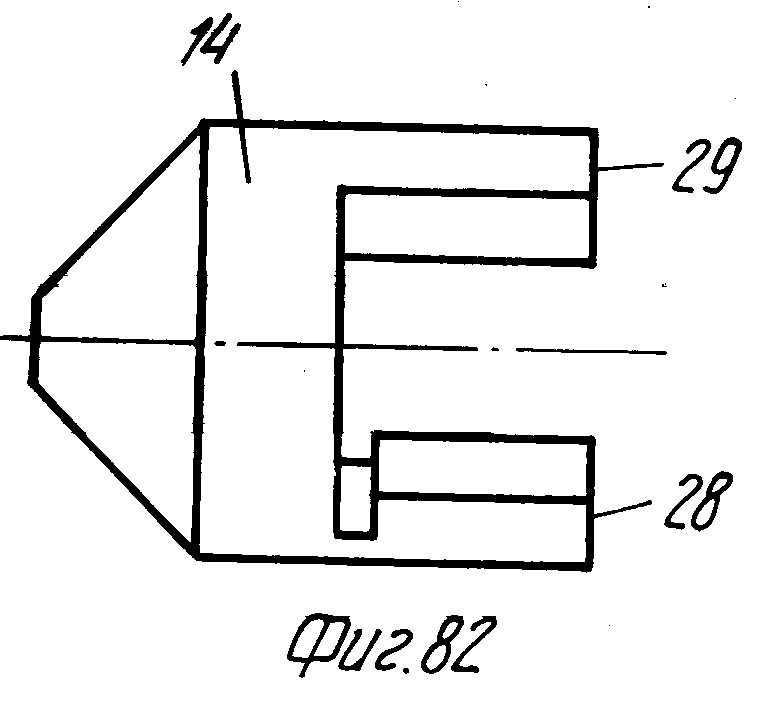
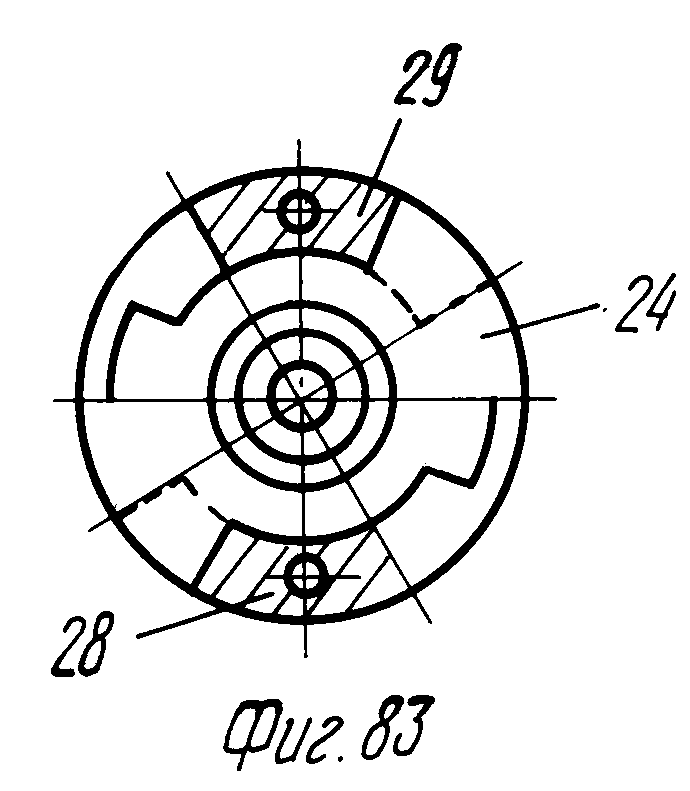
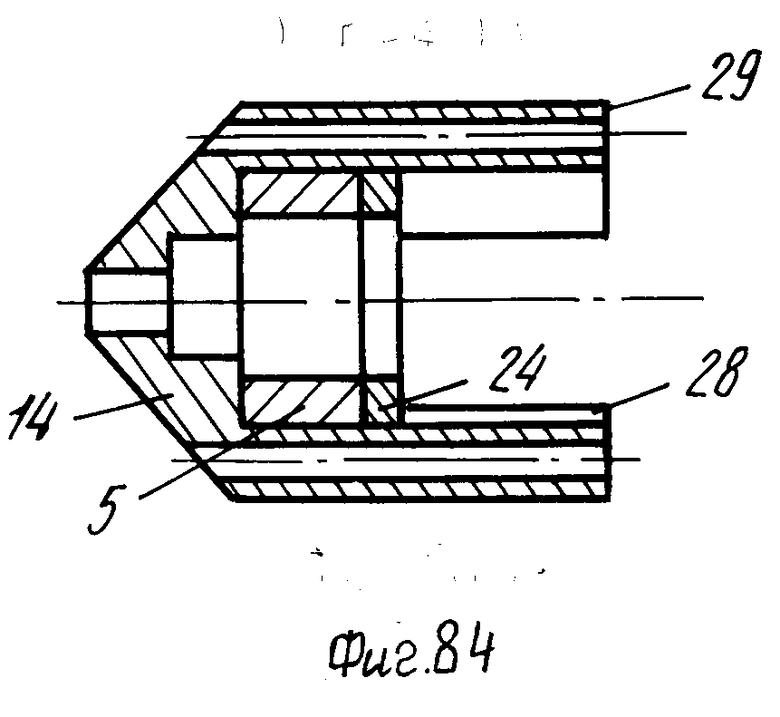
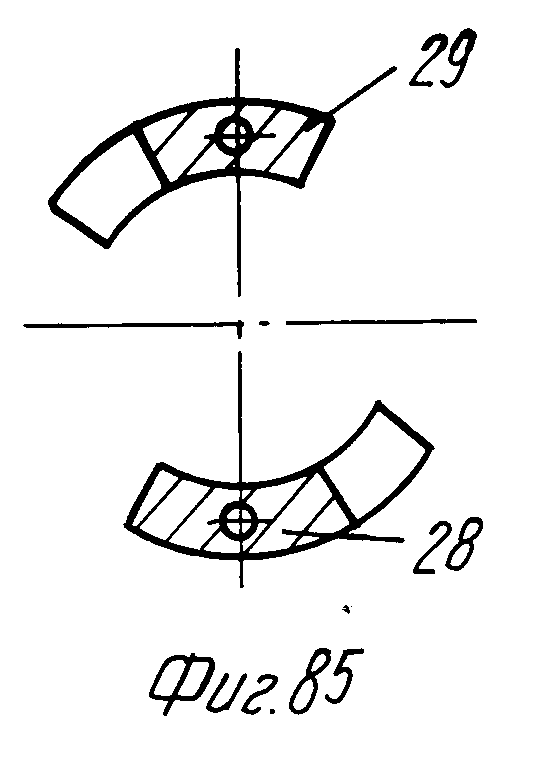
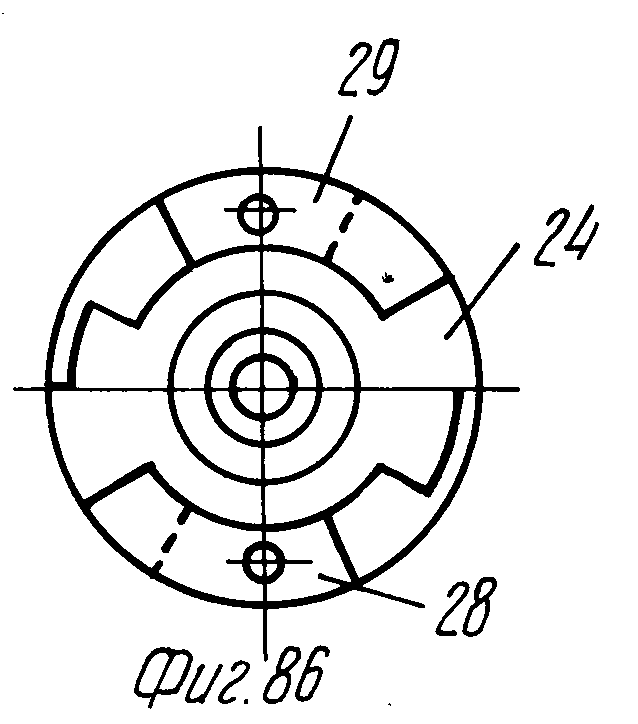
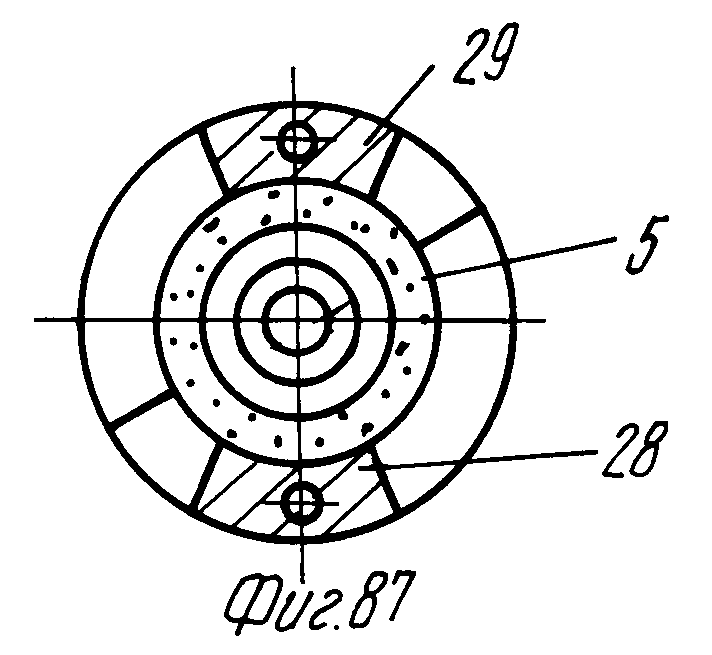
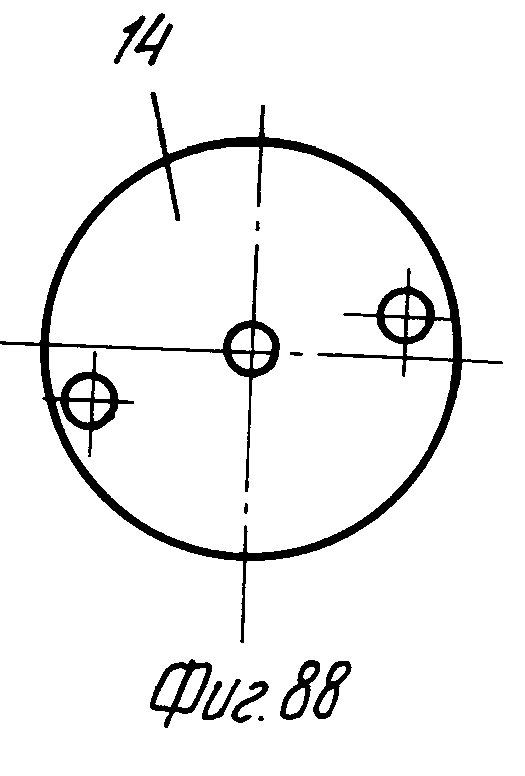
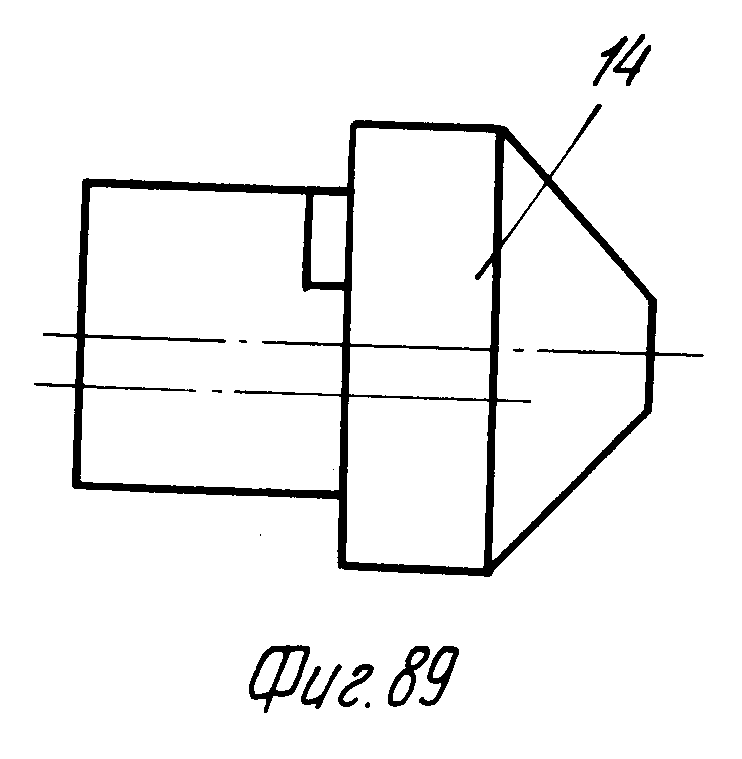
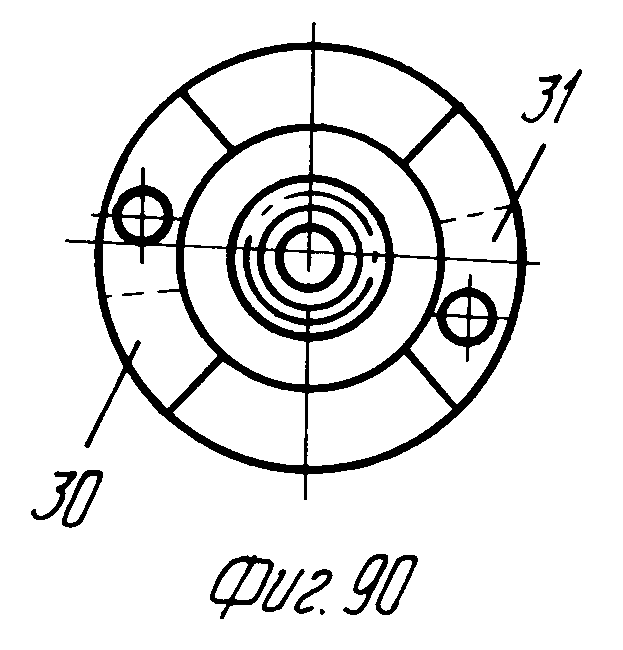
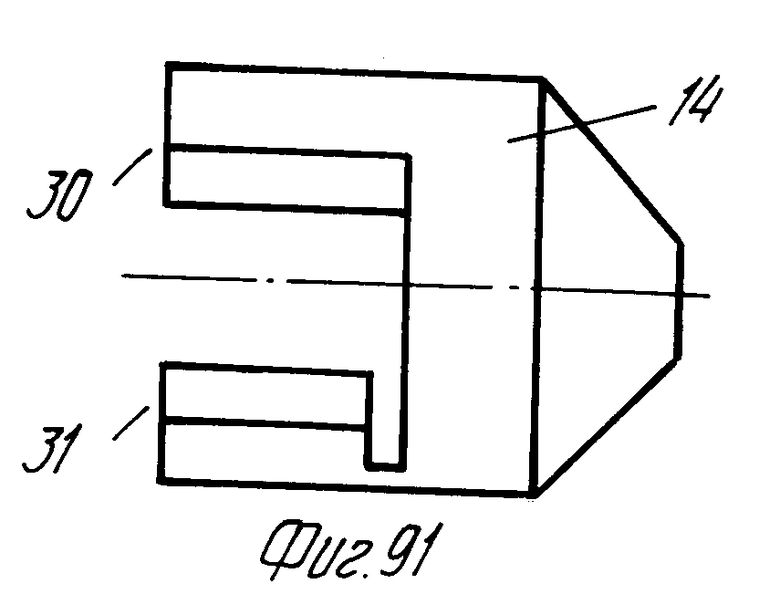
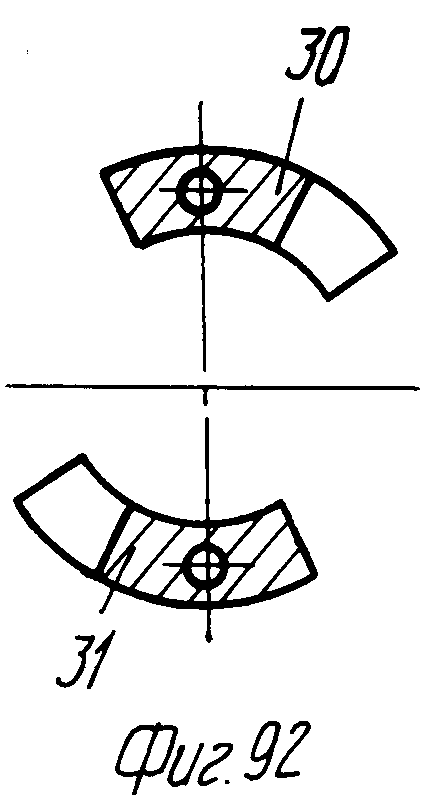
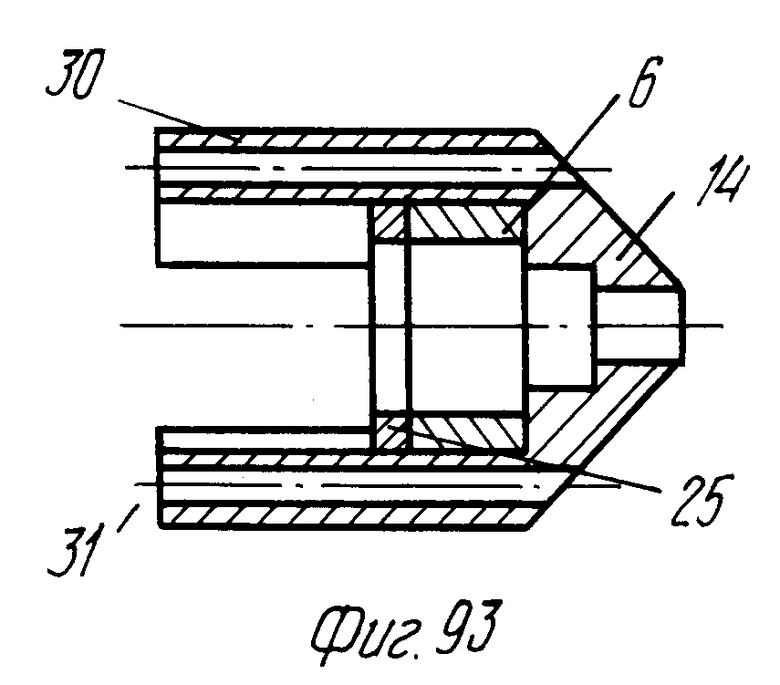
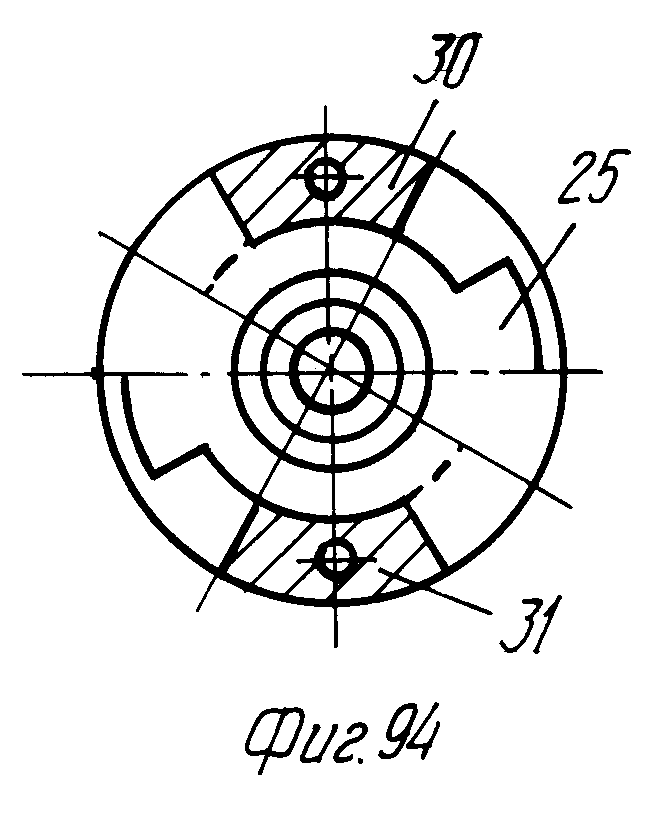
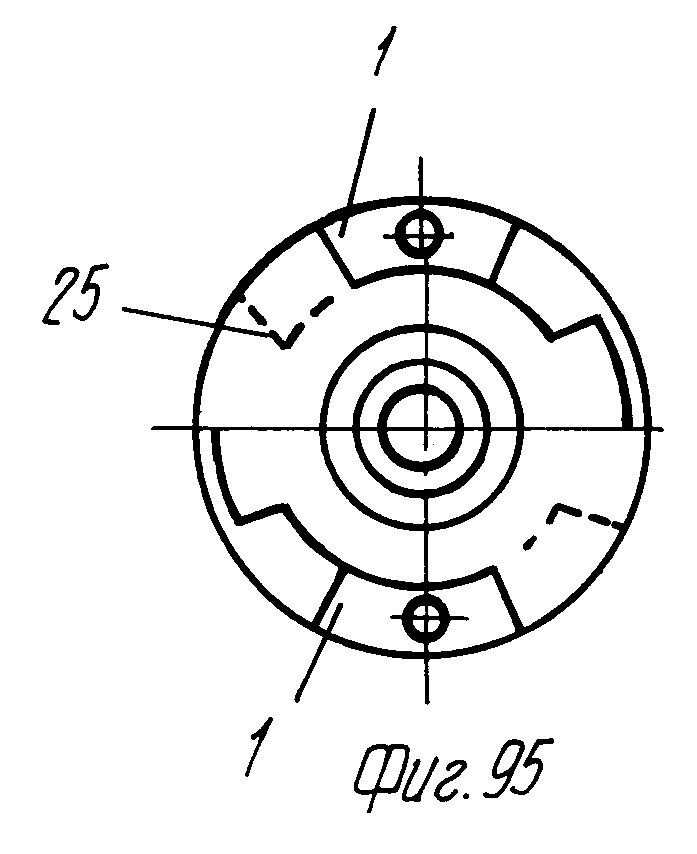
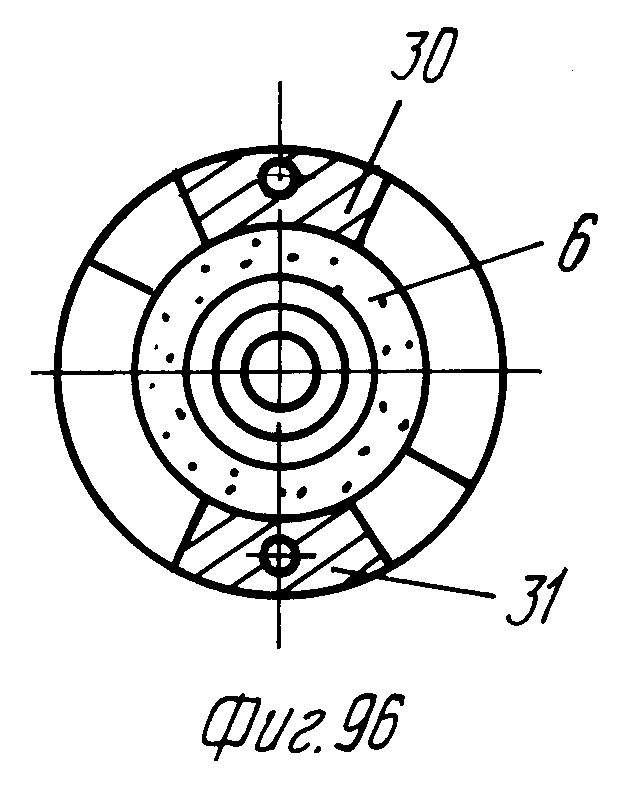
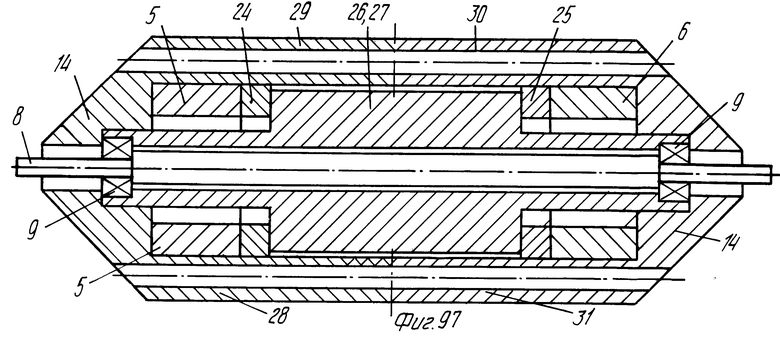
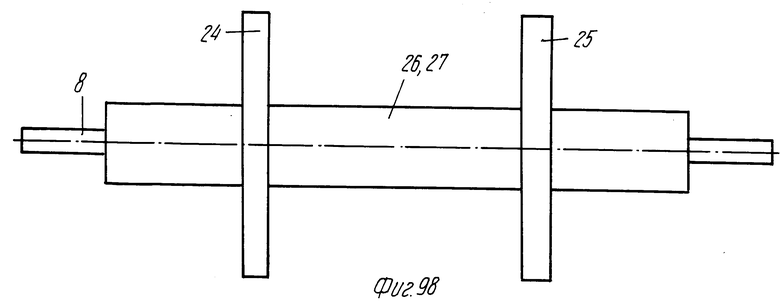
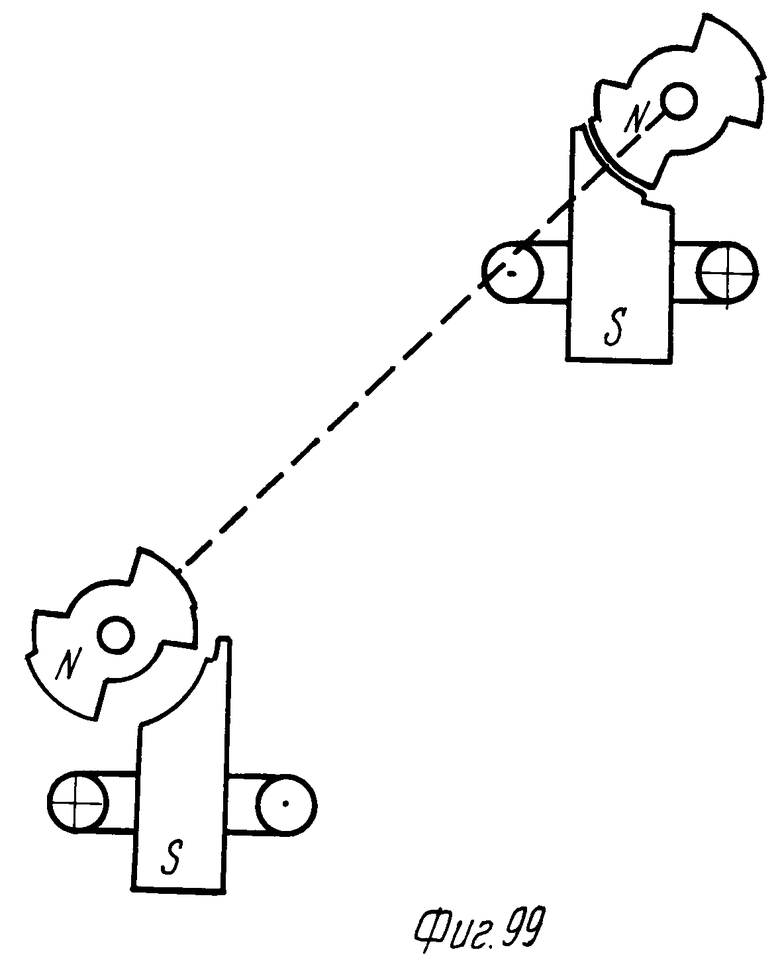
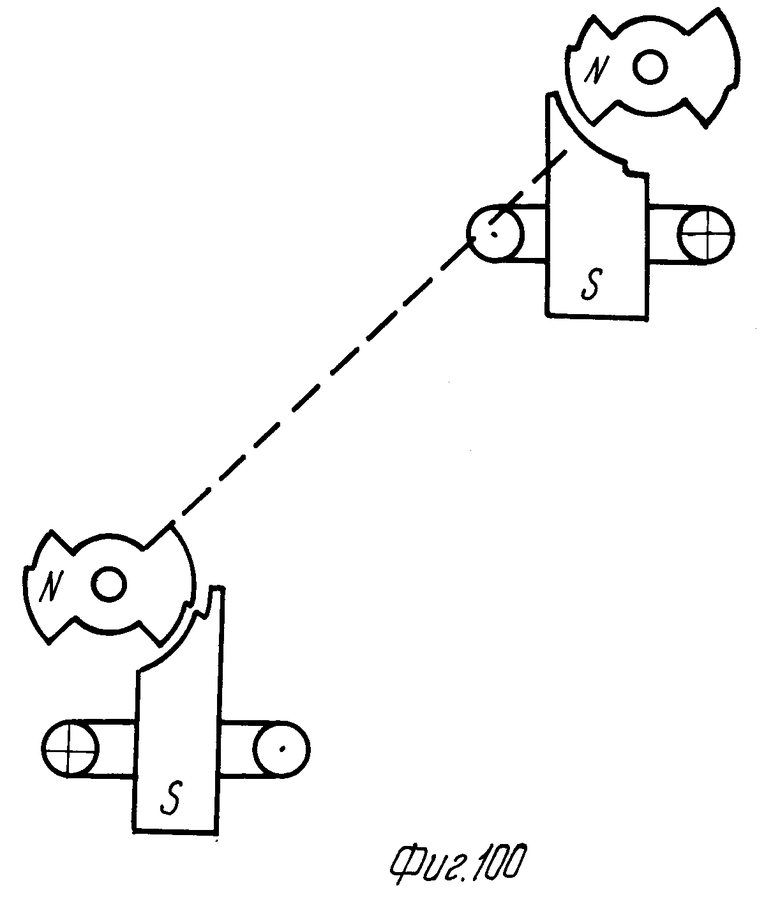
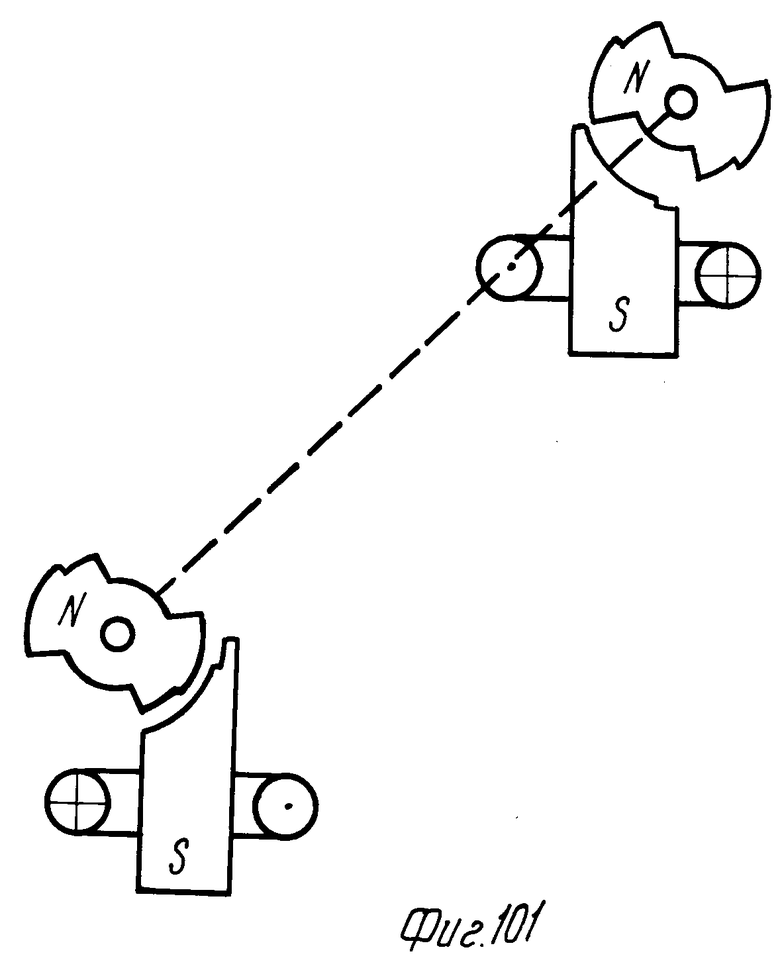
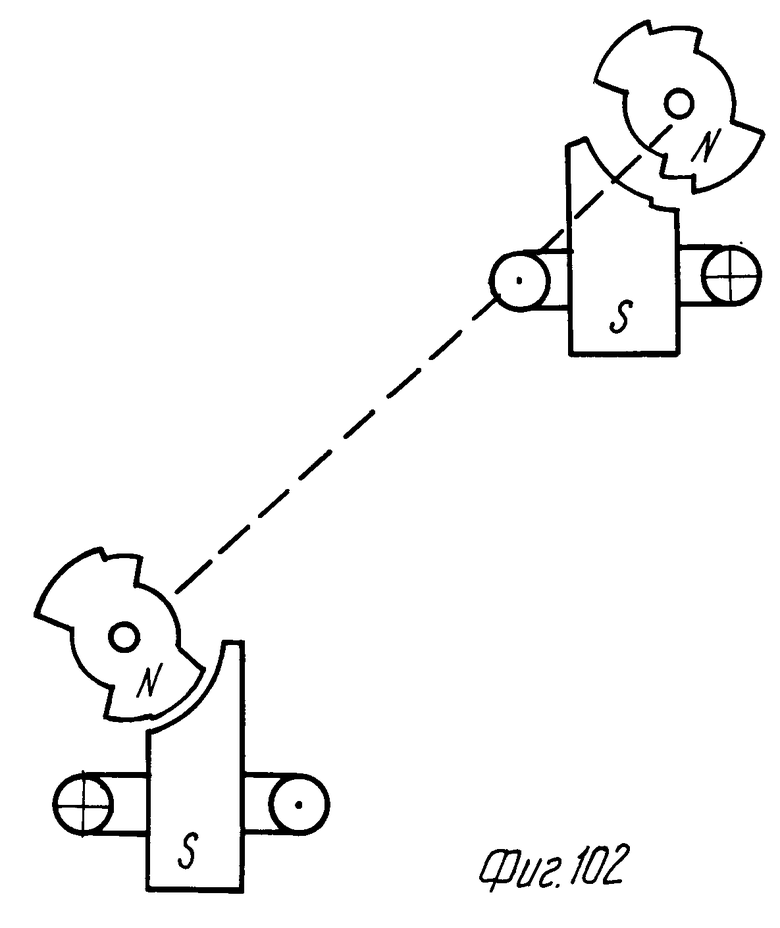
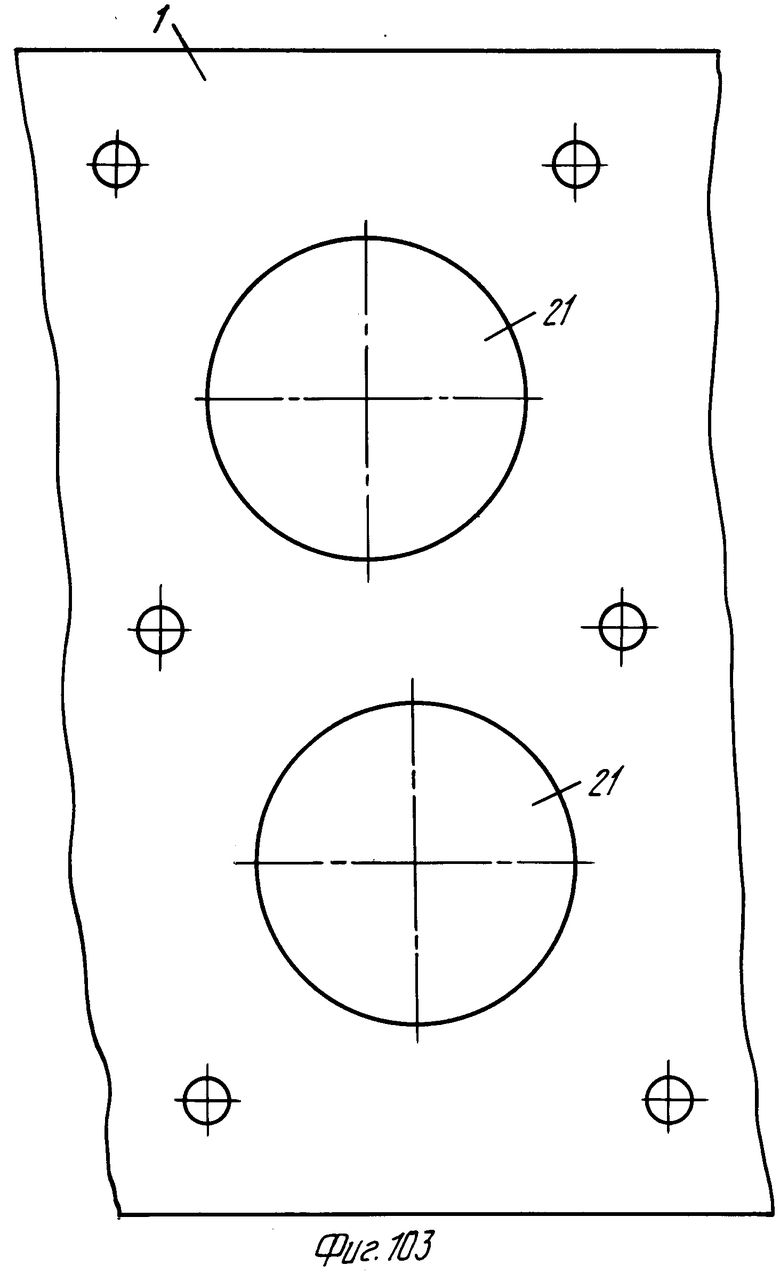
На фиг. 67 магнитопровод; на фиг. 68 разрез Р-Р на фиг. 67; на фиг. 69 разрез С-С на фиг. 67; на фиг. 70 разрез У-У на фиг. 67; на фиг. 71 разрез Т-Т на фиг. 67; на фиг. 72 положение катушек и роторов относительно магнитопровода, вид со стороны индикации времени; на фиг. 73 положение ротора, вид сбоку; на фиг. 74 разрез Э-Э на фиг. 73; на фиг. 75 разрез Я-Я на фиг. 73; на фиг. 76-82 часть подвижного корпуса; на фиг. 83-87 часть корпуса с магнитом и диском ротора; на фиг. 88-91 другая часть подвижного корпуса; на фиг. 92-96 часть корпуса с магнитом и дисками ротора; на фиг. 97, 98 модификации ротора; на фиг. 99-102 пояснение принципа действия; на фиг. 103 подмагничивающие статор магниты; на фиг. 10 цифровое изображение.
На немагнитный корпус 1 установлен вырубленный без стыков магнитопровод 2 со стержнями и полюсными наконечниками 4.
Вырубленные диски 24 и 25 установлены параллельно друг другу на оси вращения, размещенной на одинаковых расстояниях от осей согласно включенных катушек 7, неподвижный вал 8 установлен с возможностью вращения в опорах 9 (предпочтительно подшипниках) с ориентацией и фиксацией концов в стойках 10.
Роторные диски 24 и 25 соединены с магнитопроводной втулкой 26, которая может быть установлена на втулке 27 (см. фиг. 78, справа) или выполнен за одно целое с ней (см. фиг. 97). В последнем случае выступающие концы детали 26, 27 крышки 14 подвижного корпуса (алюминий, пластмасса и т.п.) имеют выступы 28, 29 и 30, 31. В них размещены аксиально намагниченные магниты 5, 6 и роторные диски 24, 25, как это показано на фиг. 79-96.
Возможно выполнение элементов 24 и 25 за одно целое с деталью (поз. 26, 27, см. фиг. 96) при изготовлении в небольших количествах.
К торцу магнитопровода 2 со стороны, противоположной стойкам 10 и катушкам 7, прилегают магниты 21, размещенные в специальных отверстиях основания 1 и подмагничивающие наконечники 4 стержней 3 с полярностью, обратной полярности торцов магнитов 5, 6, прилегающих к торцам элементов 24 и 25.
При отсутствии импульса тока в катушках 7 положение дисков 24 и 25 соответствует, например, показанному на фиг. 99. С появлением тока соответствующей полярности возникает индукторно-реактивный момент, под действием которого совершается поворот дисков 24 и 25 последовательно в положение по фиг. 100, 101 и фиксируется в положении по фиг. 102.
С поступлением импульса противоположной полярности новый поворот на угол π/2.
Все семь бленкеров знакоместа управляются независимо друг от друга. С поступлением импульса в каждую пару катушек (см. фиг. 72, 73) получается изображение одной из десяти арабских цифр (см. фиг. 10).
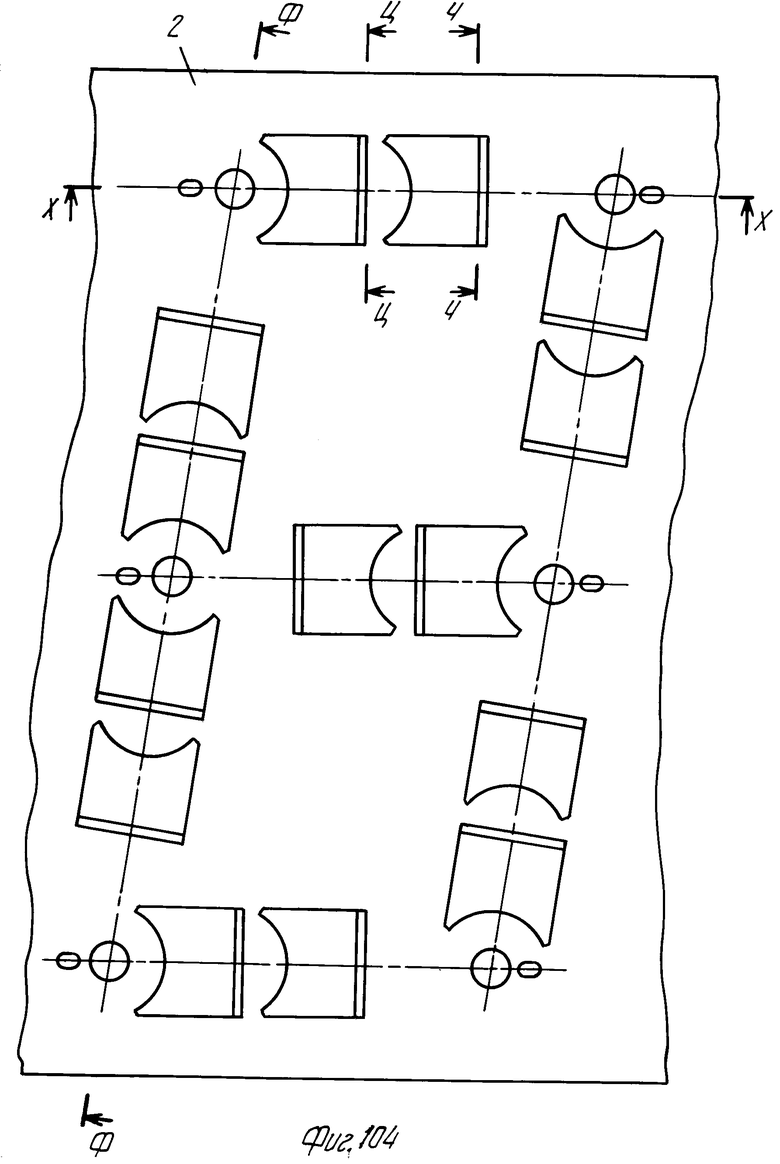
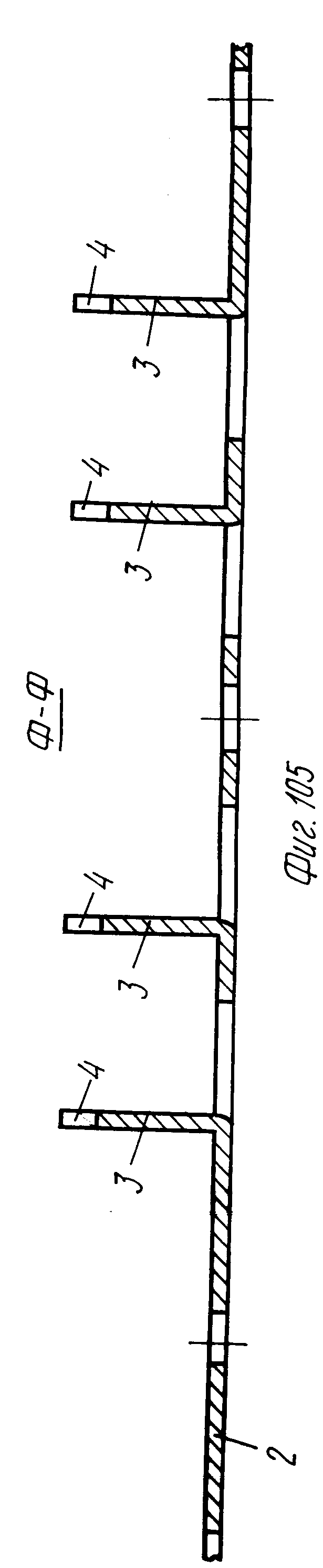
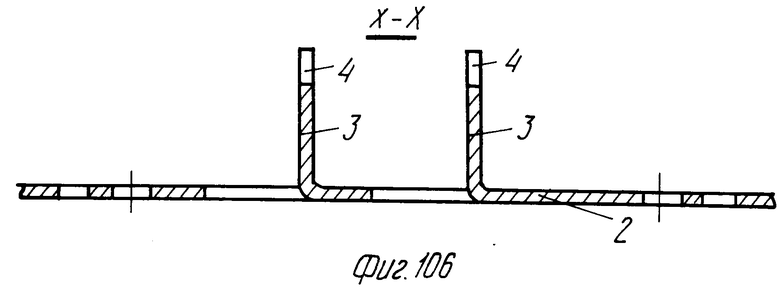
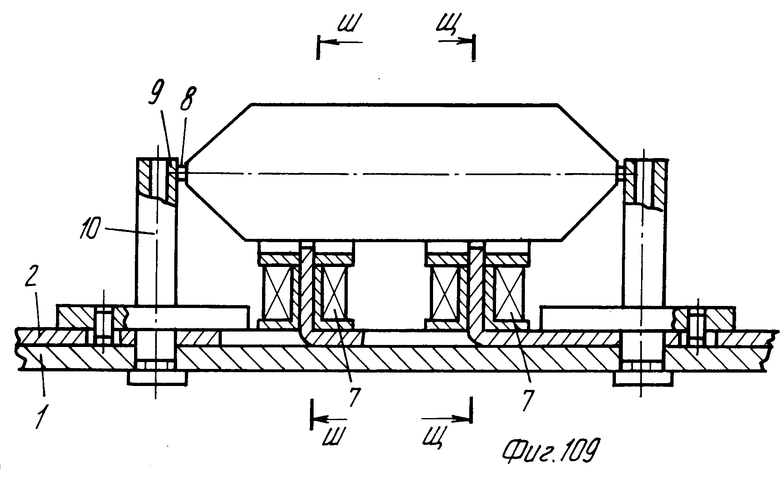
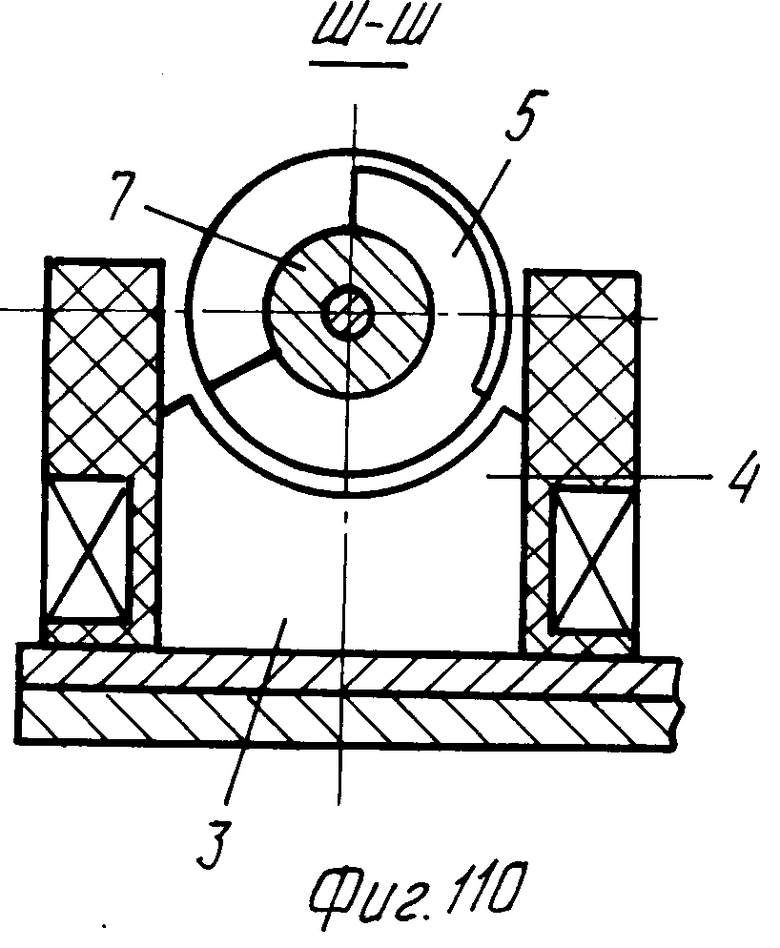
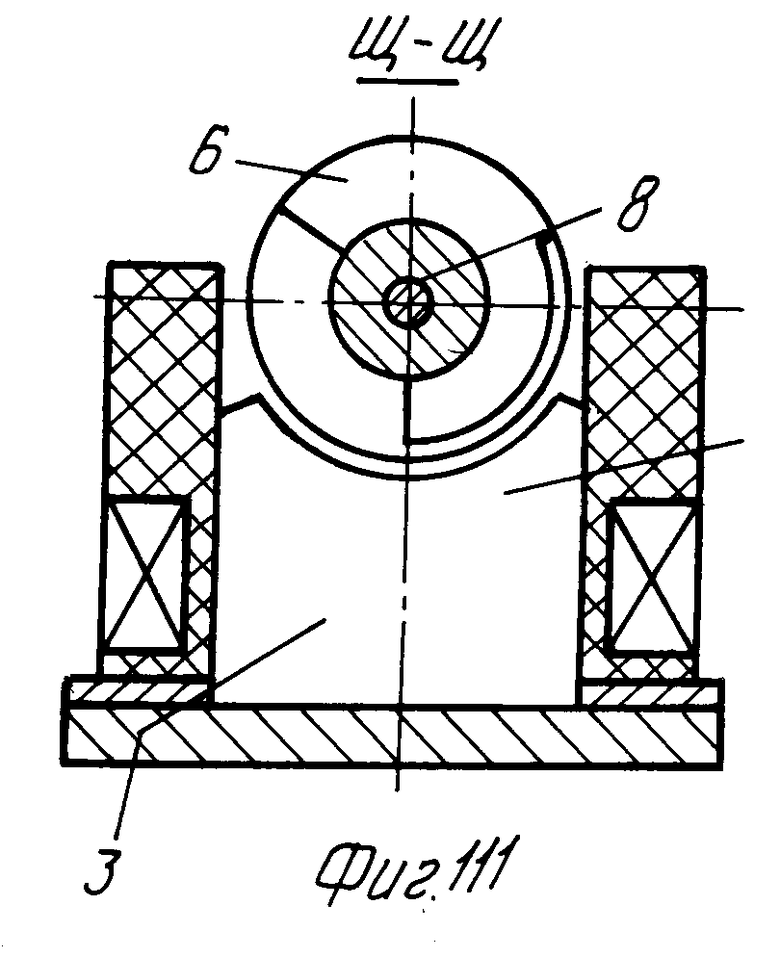
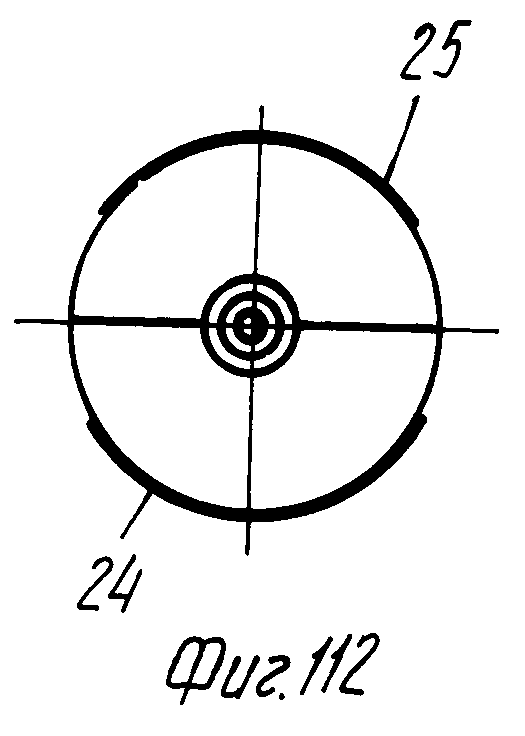
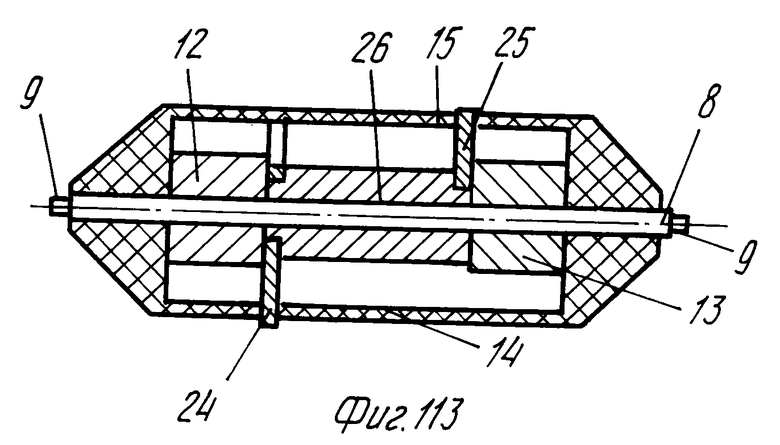
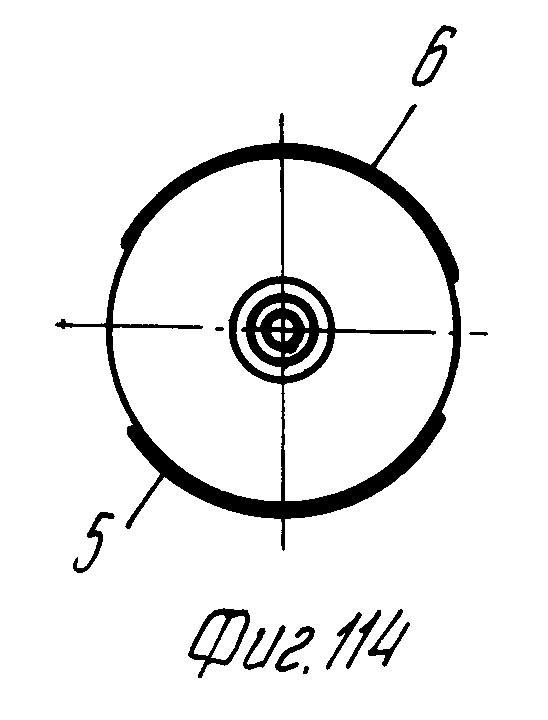
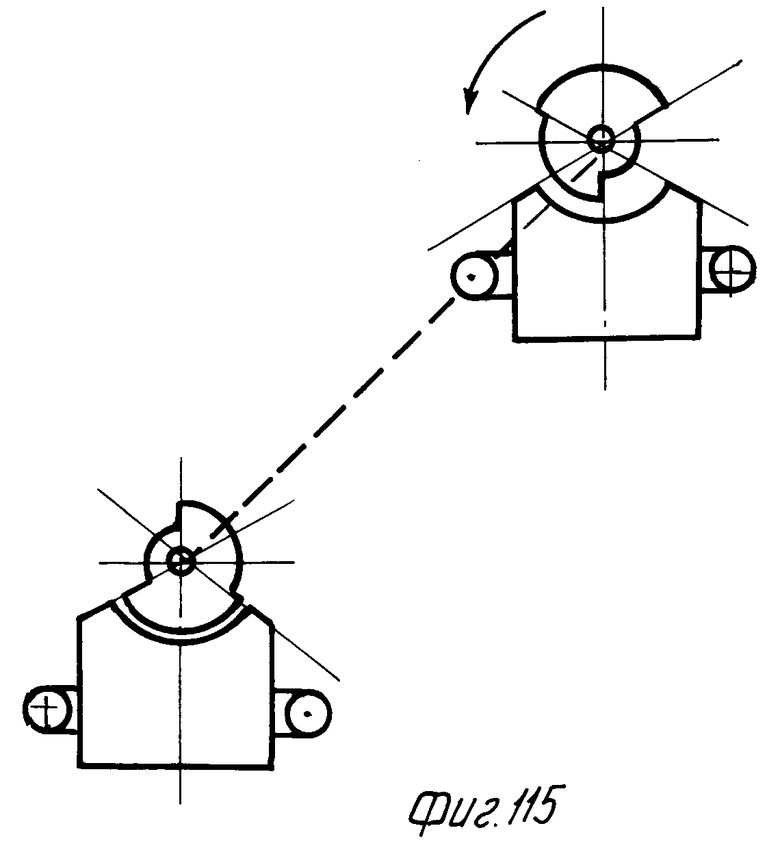
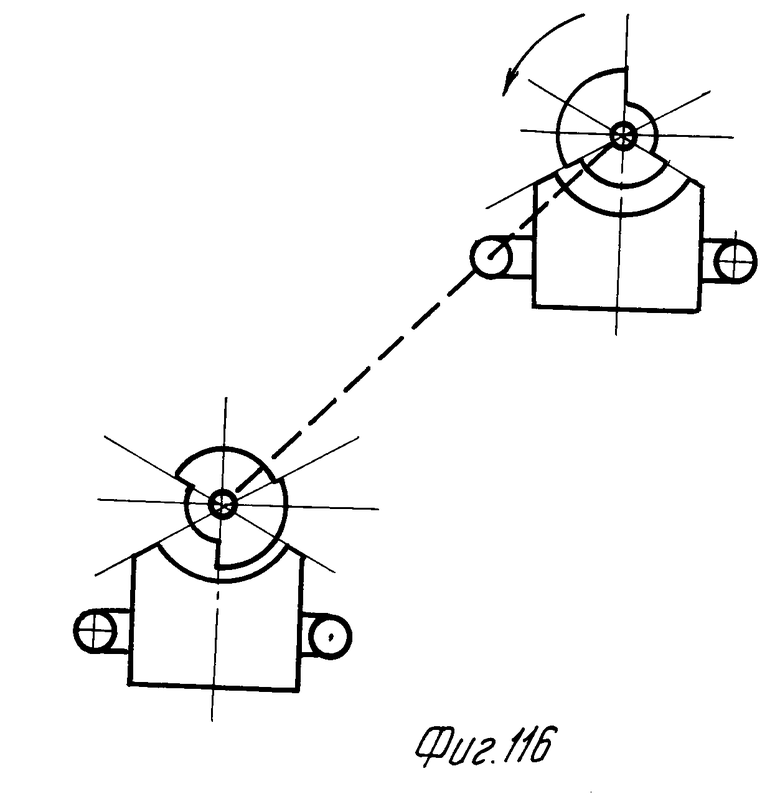
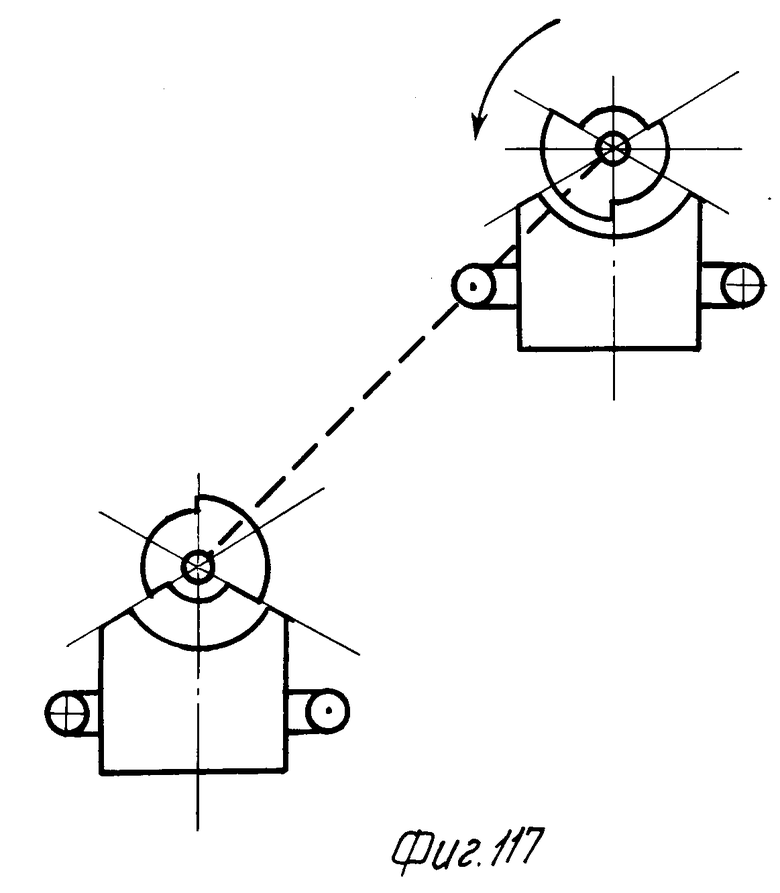
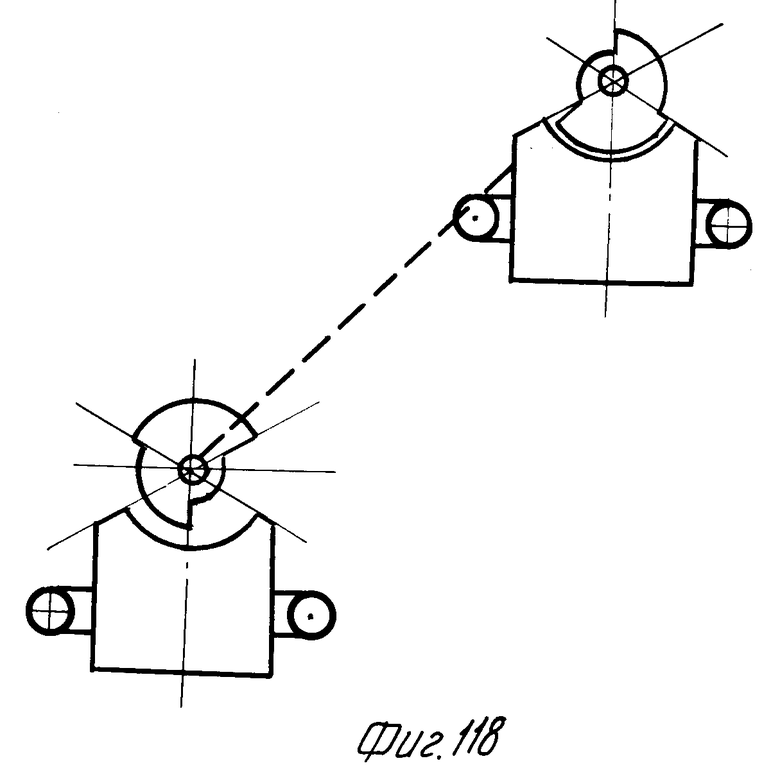
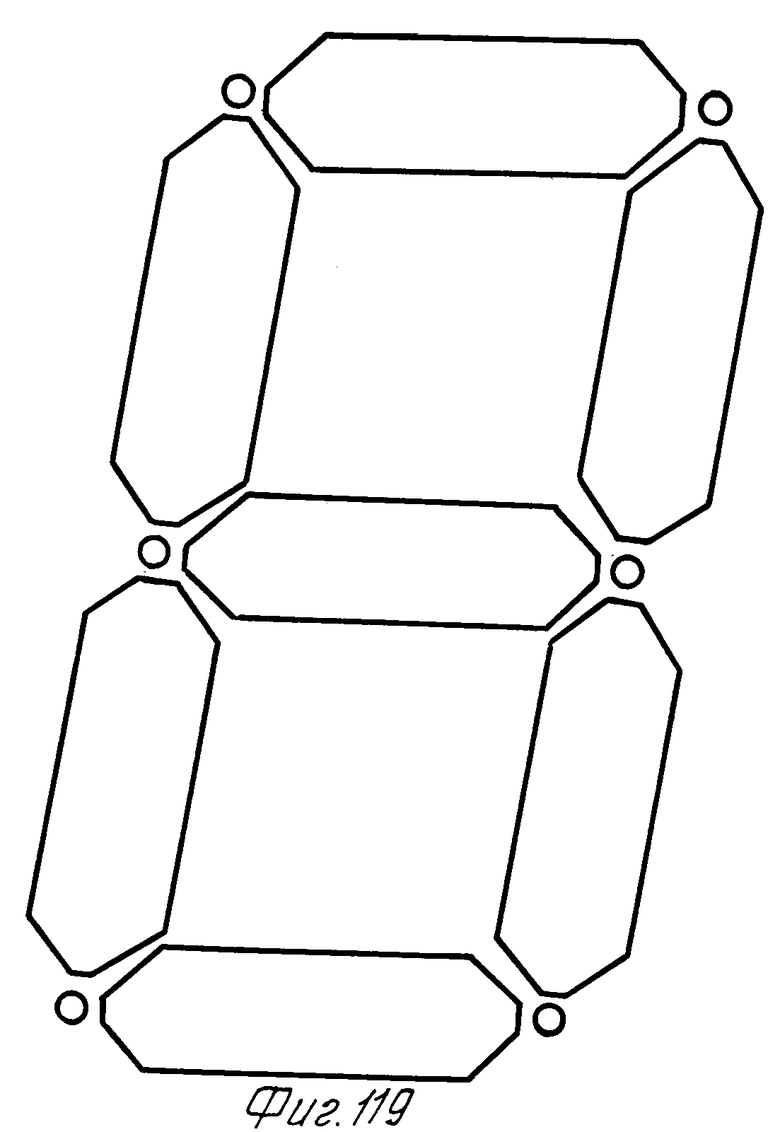
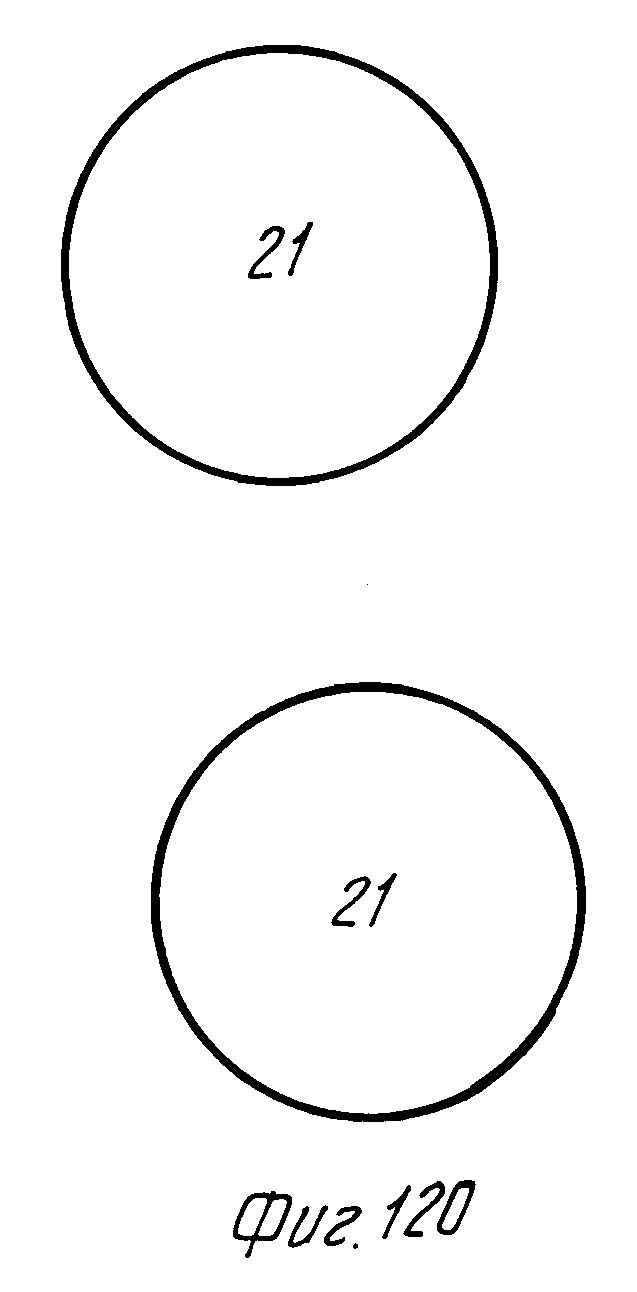
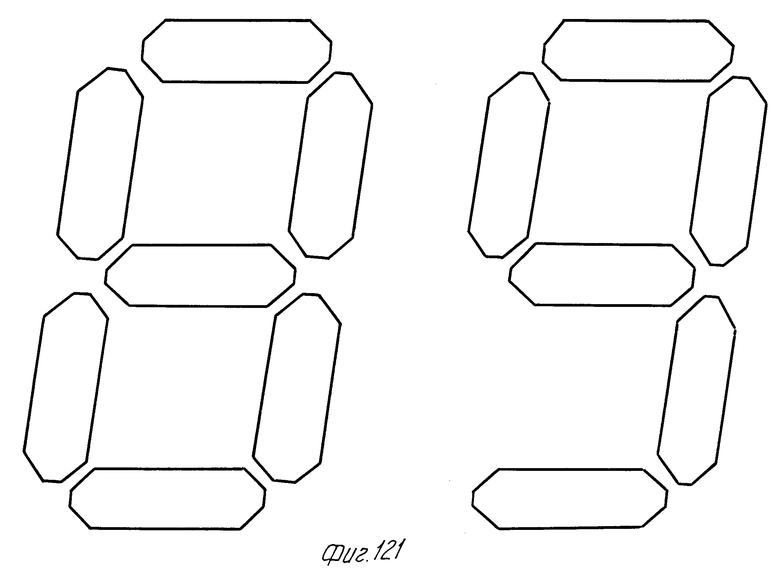
Шестая модификация исполнения индикатора показан на фиг. 104-121. На фиг. 104 часть магнитопровода без стыков (для одного семибленкерного знакоместа вырыв); на фиг. 105 разрез Ф-Ф на фиг. 104 (вырывы); на фиг. 106 разрез Х-Х на фиг. 104; на фиг. 107, 108 разрезы Ц-Ц и Ч-Ч на фиг. 104 (вырывы); на фиг. 109 показано расположение катушек 7 и опорных стоек для роторов на магнитопроводе; на фиг. 110, 111 разрезы Ш-Ш и Щ-Щ на фиг. 109; на фиг. 112-114 пояснение конструкции ротора преобразователя; на фиг. 115-118 пояснение принципа действия; на фиг. 119 схематичное пояснение эргономичности и качества изображения; на фиг. 120 пример размещения поляризующих магнитов на торце магнитопровода; на фиг. 121 пример индикации.
На корпусе 1 (алюминий, латунь, пластмасса и т.п.) установлен пластинчатый магнитопровод 2 (не имеющий стыков) со стержнями 3 и полюсными наконечниками 4.
Роторные диски 24 и 25 установлены с разворотом на половину оборота на осях вращения, перпендикулярных осям катушек 7 валов 8, цапфы 9 которых размещены в специальных стойках 10.
Роторы соединены коаксиальной валу магнитопроводящей втулкой 26 (см. фиг. 113). К торцам дисков 24 и 25 прилегают встречно намагниченные магниты 5 и 6. Одна половина боковой поверхности ротора (см. фиг. 112-114) имеет, например, черный цвет, а другая соответственно, например, белый (фиг. 121).
Активные элементы ротора целесообразно разместить, например, внутри пластмассовой оболочки из двух частей 14, соответственно разного цвета снаружи.
Слегка выступающие за боковую поверхность оболочки 24 и 25 имеют снаружи цвет, сливающийся с цветом половин оболочки для высокого качества изображения.
Магниты 21 могут быть помещены, например, в специальных отверстиях корпуса 1.
Устройство работает с независимым управлением каждым из семи бленкеров каждого из знакомест. При отсутствии тока в катушках 7 фиксированное положение (см. фиг. 115). С поступлением в катушки 7 тока возникает момент, поворачивающий вал 8 с дисками 5, 6 (см. фиг. 116, 117) в новое устойчивое положение (фиг. 118). Шаг в пол-оборота завершен. При поступлении нового импульса другой полярности процесс повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ БЛЕНКЕРНЫХ ЧАСОВ МОСТОВОЙ ИНДУКТОРНО-РЕАКТИВНЫЙ С АКТИВНЫМ РОТОРОМ | 1989 |
|
RU2016422C1 |
| ЧАСОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ МОСТОВОЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ШАГОВЫЙ С АКТИВНЫМ РОТОРОМ ДЛЯ БЛЕНКЕРНЫХ ЗНАКОМЕСТ ЦИФРОВЫХ ЧАСОВ | 1989 |
|
RU2031448C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |
| ИНДУКТОРНО-РЕАКТИВНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ ИНДИКАЦИИ ВРЕМЕНИ | 1988 |
|
RU2016475C1 |
| Часовой электродвигатель - модуль для бленкерного знакоместа | 1988 |
|
SU1830600A1 |
| Электромагнитный индикатор | 1991 |
|
SU1837376A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030075C1 |
| ИНДУКТОРНО-РЕАКТИВНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1988 |
|
RU2030071C1 |
| Шаговый электродвигатель | 1990 |
|
SU1810964A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2214669C2 |


Использование: приборостроение, в частности часовая промышленность. Сущность изобретения: на корпусе установлен пластинчатый магнитопровод со стержнями и конусными наконечниками. Магниты-роторы установлены на опорах вращения в специальных стойках и образуют модуль-сегмент. Семь сегментов образуют единое знакоместо. С появлением тока в управляющих катушках возникает момент, поворачивающий роторы. Разная окраска модулей позволяет формировать различные цифры на знакоместе. 7 з. п. ф-лы, 121 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4070668, кл | |||
| Способ отопления гретым воздухом | 1922 |
|
SU340A1 |
