Изобретение относится к электротехнике и может быть использовано в электрических микромашинах с постоянными магнитами.
Целью изобpетения является повышения надежности путем улучшения фиксации.
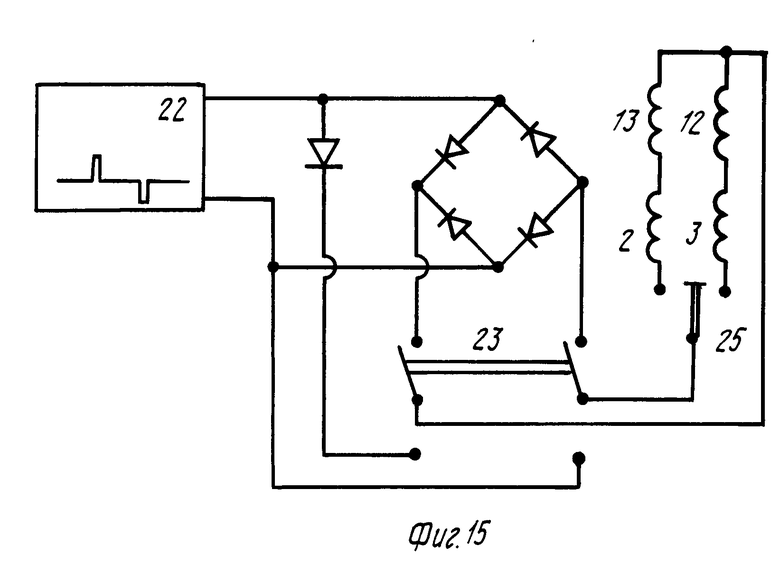
На фиг. 1 представлен двигатель с видом на дополнительные катушки статора, поперечный разрез; на фиг. 2 - то же, продольный разрез; на фиг. 3 - двигатель с видом на основные катушки статора (разрез А-А на фиг. 2); на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - принцип действия двигателя согласно фиг. 1-4; на фиг. 6 и 7 - конструкция модификации двигателя, способного к реверсивному вращению; на фиг. 8 и 9 - принцип действия согласно фиг. 6 и 7; на фиг. 10 и 11 - поперечный разрез и вид с торца на вырезы в магнитопроводе модификации конструкции с удвоенным числом зубцов у дополнительных полюсных наконечников соответственно; на фиг. 12 и 13 - принцип действия двигателя согласно фиг. 10 и 11; на фиг. 14 - схема включения двигателя согласно фиг. 1 - 4 для работы от источника разнополярных импульсов постоянного тока; на фиг. 15 - схема включения двигателя согласно фиг. 6 и 7 для работы от источника разнополярных импульсов постоянного тока.
Электродвигатель содержит магнитопровод 1, выполненный в виде цилиндра, на котором установлены катушки 2 и 3 обмотки управления, расположенные коаксиально. Между катушками 2 и 3 расположены валы 4 и 5 роторов 6 и 7. Роторы 6 и 7 выполнены в виде кольцевых постоянных магнитов 8 и 9. На торцах магнитов 8 и 9, обращенных к катушкам 2 и 3 обмотки управления, установлены плоские ферромагнитные полюсные наконечники 10 и 11 в виде зубцов. С другого торца роторов 6 и 7 на магнитопроводе 1 установлены дополнительные коаксиальные катушки 12 и 13, между которыми размещены постоянные магниты 8 и 9. Роторы 6 и 7 соединены с общим валом 14 при помощи зубчатых колес 15 - 17. На торце магнитопровода статора выполнены вырезы 18 и 19, расположенные напротив впадин между зубцами дополнительных плоских ферромагнитных полюсных наконечников 20 и 21, которые установлены на торцах магнитов 8 и 9 роторов 6 и 7 между дополнительными коаксиальными катушками 12 и 13.
У двигателя согласно фиг. 1-5 число зубцов дополнительных плоских ферромагнитных полюсных наконечников 20 и 21 равно числу зубцов плоских ферромагнитных полюсных наконечников 10 и 11. Угловая протяженность зубца дополнительного плоского ферромагнитного полюсного наконечника 20 больше угловой протяженности зубца плоских ферромагнитных полюсных наконечников 10 и 11 и составляет 5/4 π, а угловая протяженность зубца другого дополнительного плоского ферромагнитного полюсного наконечника 21 меньше угловой протяженности зубцов плоских ферромагнитных полюсных наконечников 10 и 11, равна угловой протяженности промежутков между вырезами 18 и 19 на торце цилиндра магнитопровода 1 и составляет 3/4π, причем угловая протяженность зубцов плоских ферромагнитных полюсных наконечников 10 и 11 равна половине их зубцового деления, а у зубцов дополнительного плоского ферромагнитного полюсного наконечника 20, имеющих угловую протяженность, большую, чем половина угловой протяженности зубцового деления, один из краев установлен напротив одного края вырезов 18 в магнитопроводе 1, зубцы дополнительных плоских ферромагнитных полюсных наконечников 20 и 21 размещены симметрично относительно диаметральной оси коаксиальных катушек 2, 3 и 12, 13, пересекающей оси вращения роторов 6 и 7, а оси симметрии плоских ферромагнитных полюсных наконечников 10 и 11 установлены под углом π/8 к упомянутой диаметральной оси коаксиальных катушек, вырез 19 в магнитопроводе 1, расположенный напротив дополнительного плоского ферромагнитного наконечника 21 с зубцами меньшей угловой протяженности, размещен симметрично относительно диаметральной оси коаксиальных катушек, пересекающей оси вращения роторов, вырез 18 в магнитопроводе, расположенный напротив дополнительного плоского ферромагнитного полюсного наконечника 20 с зубцами большей угловой протяженности, размещен со смещением оси симметрии на угол, равный π/4, относительно той же диаметральной оси.
У двигателя согласно фиг. 6 и 7 число зубцов дополнительных плоских ферромагнитных полюсных наконечников 20 и 21 равно числу зубцов плоского ферромагнитного полюсного наконечника 11 одного ротора и половине числа зубцов плоского ферромагнитного полюсного наконечника 10 другого ротора. Угловая протяженность каждого из зубцов дополнительных плоских ферромагнитных полюсных наконечников 20 и 21 равна половине угловой протяженности зубцового деления плоского ферромагнитного полюсного наконечника 11, равной угловой протяженности зубцового деления плоского ферромагнитного полюсного наконечника 10, которое равно угловой протяженности вырезов 18 и 19 на торце магнитопровода 1 статора, и составляет π. Зубцы дополнительных плоских ферромагнитных полюсных наконечников 20 и 21 равны по угловой протяженности зубцам плоского ферромагнитного полюсного наконечника 11 одного из роторов, установлены симметрично относительно диаметральной оси коаксиальных катушек, пересекающей оси вращения роторов, а оси симметрии плоского ферромагнитного полюсного наконечника 10 другого ротора установлены со смещением на четверть угловой протяженности его зубцового деления относительно той же диаметральной оси.
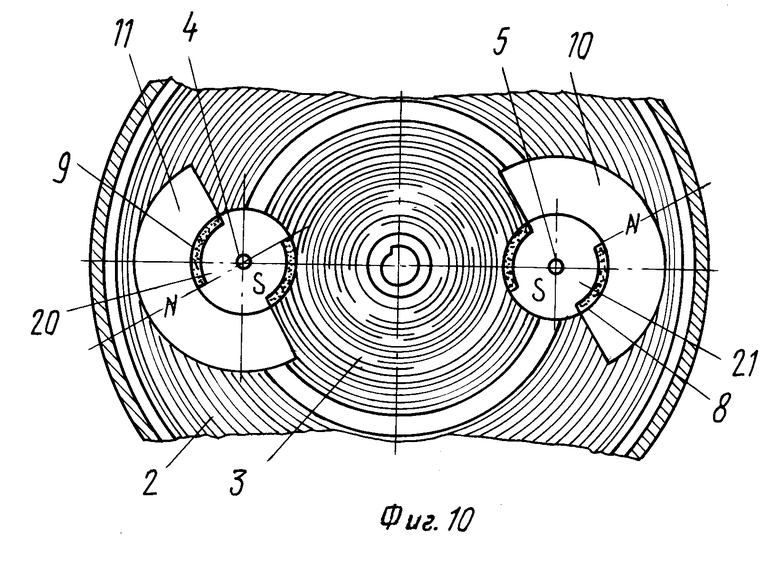
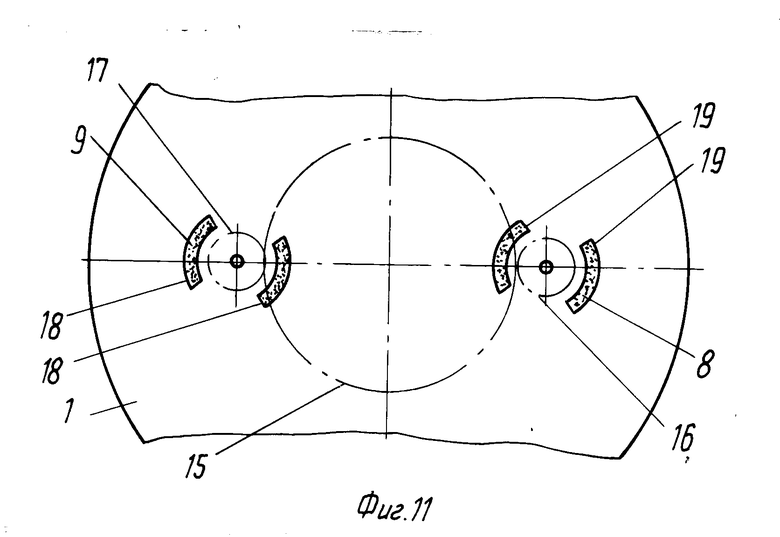
У двигателя согласно фиг. 10 и 11 число зубцов каждого из дополнительных плоских ферромагнитных полюсных наконечников 20 и 21 равно удвоенному числу зубцов каждого из плоских ферромагнитных полюсных наконечников 10 и 11. Угловая протяженность каждого из зубцов дополнительных плоских ферромагнитных полюсных наконечников 20 и 21 равна четверти зубцового деления плоских ферромагнитных полюсных наконечников 10 и 11, равной угловой протяженности вырезов 18 и 19 на торце магнитопровода 1 статора, и составляет π/2. Оси симметрии зубцов плоских ферромагнитных полюсных наконечников 10 и 11 установлены со смещением относительно диаметральной оси коаксиальных катушек, пересекающей оси вращения роторов на угол, величина которого находится в пределах от одной двенадцатой до одной шестой части угловой протяженности зубцового деления плоских ферромагнитных полюсных наконечников.
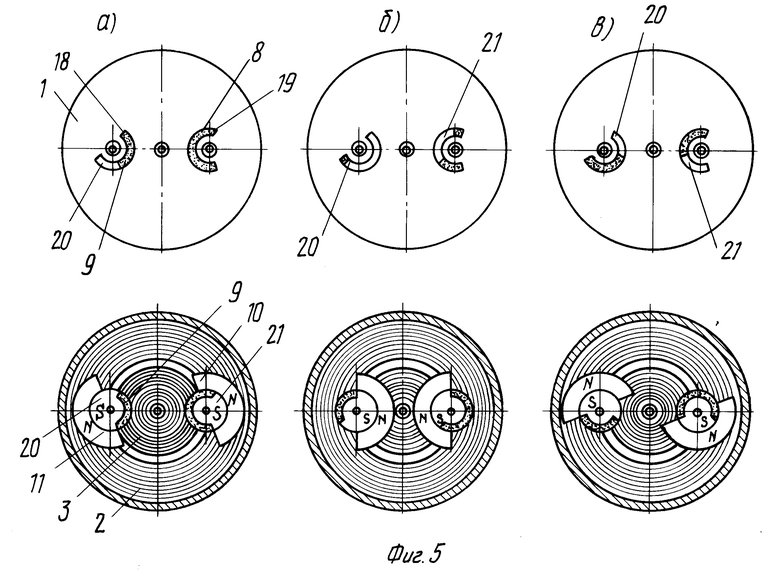
Электродвигатель согласно фиг. 1 - 4 работает следующим образом (фиг. 5).
При поступлении импульса тока определенной полярности в катушки 2, 3, 12 и 13 обмотки управления возникает магнитное поле, которое взаимодействует с зубцами полюсных наконечников 10 и 11 роторов, тем самым создается пусковой момент и роторы поворачиваются из исходного положения согласно фиг. 5а в положение согласно фиг. 5б (роторы поворачиваются против часовой стрелки).
После окончания импульса тока в обмотке ротор с магнитом 9 стремится повернуться в положение согласно фиг. 5в под действием реактивного момента, обусловленного наличием дополнительных плоских ферромагнитных полюсных наконечников 20 и вырезов 18 на торце магнитопровода, а из положения согласно фиг. 5в ротор с магнитом 8 стремится довернуться до положения согласно фиг. 5а, завершив таким образом, шаг, равный 2π , под действием реактивного момента, обусловленного наличием дополнительных плоских ферромагнитных полюсных наконечников 21 и вырезов 19 на торце магнитопровода.
При поступлении нового импульса тока той же полярности роторы совершают новый поворот на угол 2π в той же последовательности.
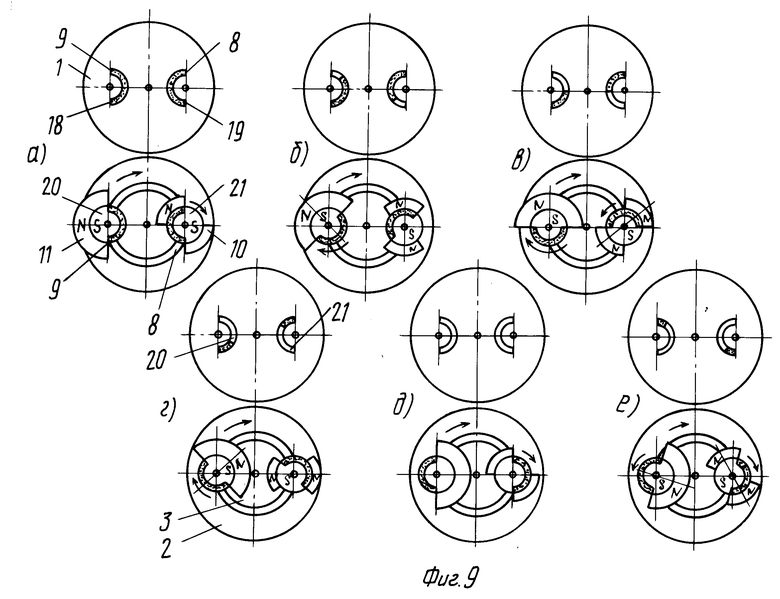
Работа модификации двигателя согласно фиг. 6 и 7 поясняется на фиг. 8 и 9.
При прохождении импульса тока определенной полярности по катушкам 3 и 12 (т. е. ближайшим к валу колеса 15) возникает магнитное поле, которое взаимодействует с зубцами полюсных наконечников 10 и 11.
В начальный момент времени (фиг. 8а) активный вращающий момент создается исключительно ротором с полюсным наконечником 10.
Под действием этого момента роторы из положения согласно фиг. 8а стремятся повернуться в направлении, соответствующем положению согласно фиг. 8б, в котором ротор с полюсным наконечником 10 вращающегося момента уже не создает.
Дальше вращение происходит из положения согласно фиг. 8б в положение согласно фиг. 8в под действием вращающего момента, создаваемого ротором с полюсным наконечником 11.
Из положения согласно фиг. 8в в положение согласно фиг. 8г поворот роторов происходит в том же направлении под действием разности противоположно направленных моментов роторов с полюсными наконечниками 10 и 11 (необходимое соотношение между этими моментами обеспечивается, например, соответствующим выбором конструктивных размеров и материалов для роторов).
Из положения согласно фиг. 8д роторы переходят в положение согласно фиг. 8е под действием активного момента, создаваемого ротором с полюсным наконечником 10.
В положении согласно фиг. 8е активные моменты, воздействующие на разные роторы, направлены встречно и взаимно уравновешиваются.
По окончании импульса тока роторы возвращаются в положение согласно фиг. 8а под действием реактивного момента, обусловленного наличием вырезов 18 и 19 в торце магнитопровода 1, совершая шаг, равный π.
При поступлении нового импульса тока той же полярности роторы совершают новый шаг, равный π, в том же направлении в описанной выше последовательности.
Если импульсы той же полярности подавать в катушки 2 и 13 обмотки, то вращение роторов будет происходить в обратном направлении, как это показано на фиг. 9а - е.
Для большей наглядности на фиг. 8 и 9 показано положение роторов лишь относительно основных катушек 2 и 3. Этого достаточно для пояснения принципа работы, поскольку моменты от дополнительных катушек складываются с момента основных катушек, не внося принципиальных изменений в работу двигателя.
Работа модификации двигателя согласно фиг. 10 и 11 поясняется на фиг. 12 и 13.
При поступлении в катушки 2, 3, 12 и 13 обмотки импульса тока определенной поляpности роторы поворачиваются из положения согласно фиг. 12а в положение согласно фиг. 12б, откуда по окончании импульса доворачиваются до положения согласно фиг. 12в, совершая шаг, равный π.
С изменением полярности импульса роторы снова совершают шаг, равный π, в том же направлении, как это показано на фиг. 13а - в.
При чередовании знакопеременных импульсов тока роторы совершают периодическое шаговое перемещение.
Таким образом, благодаря конструктивным отличиям двигателя достигаются упрощение управления, путем обеспечения работы при подаче в обмотку импульсов одной полярности, и реверс.
При питании от источника знакопеременных импульсов двигатель согласно фиг. 1 - 5 можно использовать, например, с включением по схеме согласно фиг. 14. При положении переключателя 23 "Вверх" магнитоэлектрический двигатель 24 совершает шаговое перемещение выходного вала при каждом импульсе, поступающем от генератора 22 импульсов.
При положении переключателя 23 "Вниз" магнитоэлектрический двигатель совершает шаговое перемещение выходного вала при поступлении от генератора 22 импульсов только одной полярности.
В данном случае величина средней скорости вращения вала уменьшается в два раза по сравнению с первым вариантом включения двигателя.
На фиг. 15 показана схема включения двигателя согласно фиг. 6 - 9. Направление вращения здесь зависит от положения переключателя 25, с помощью которого включается определенная половина из всех коаксиальных катушек, составляющих обмотку статора.
Таким образом, согласно фиг. 15 один двигатель может быть использован для четырех режимов работы только за счет переключения схемы питания обмотки при одном и том же генераторе импульсов.
Для доказательства эффективности могут быть приведены и другие примеры включения двигателя.
Например, двигатель способен работать также и от источника однофазного синусоидального тока с реверсированием и удвоением скорости на том же принципе, который описан выше применительно к схеме согласно фиг. 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический двигатель | 1980 |
|
SU1103328A1 |
| ШАГОВЫЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030069C1 |
| ЧАСОВОЙ СЕМИСЕГМЕНТНЫЙ ИНДИКАТОР | 1988 |
|
RU2050573C1 |
| РЕАКТИВНЫЙ СИНХРОННЫЙ ДВУХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1988 |
|
RU2032261C1 |
| ОДНОФАЗНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030068C1 |
| ИНДУКТОРНО-РЕАКТИВНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1988 |
|
RU2030071C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ УНОСИМИГ | 1990 |
|
RU2030078C1 |
| Магнитоэлектрический двигатель | 1980 |
|
SU909764A2 |
| Однофазный синхронный электродвигатель | 1982 |
|
SU1137555A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |









Использование: в электрических машинах с постоянными магнитами. Сущность изобретения: на цилиндрическом магнитопроводе 1 установлены коаксиально катушки 2 и 3 обмотки управления, между которыми расположены валы 4 и 5 роторов 6 и 7, выполненных в виде кольцевых постоянных магнитов 8 и 9 с полюсными наконечниками 10 и 11 в виде зубцов. Роторы 6 и 7 соединены с общим валом 14 при помощи зубчатых колес. При поступлении импульса тока в катушки 2 и 3 обмотки управления роторы поварачиваются на один шаг, при поступлении нового импульса той же полярности роторы совершают новый шаг. 3 з.п. ф-лы, 15 ил.
| Магнитоэлектрический двигатель | 1978 |
|
SU1099359A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
