Изобретение относится к электротехнике, а именно к управлению электродвигателями, и может найти применение в устройстве, где необходимы двигатели высокой надежности с большим моментом на валу в пазовом и беспазовом вариантах исполнения статора.
Известен вентильный электродвигатель (авт. св. СССР N 1074361), имеющий узел амплитудно-временного преобразования (АВП), в котором использован регулятор тока, включенный между основным интегратором и компаратором. Этот регулятор тока не поддерживает автоматически оптимальный угол коммутации двигателя в номинальном режиме и работает только на период запуска машины. Это приводит к тому, что угол коммутации в период запуска не оптимален, ток запуска из-за этого большой и требуется ограничение пускового тока. При этом, что весьма существенно, в этом вентильном двигателе из-за того, что на ранних стадиях и в номинальном режиме не определяется оптимальным угол коммутации, возможны частые срывы запуска, поэтому применяется узел повторного запуска. Это снижает надежность работы такого вентильного двигателя.
Наиболее близким по технической сущности и решаемой задаче к изобретению является двигатель по авт. св. СССР N 1360529, содержащий m-секционную обмотку якоря, конца секций которой связаны с информационными входами АВП, состоящего из последовательно связанных по входу-выходу ключей выборки напряжения, суммирующего усилителя, ключей выборки полярности, инвертора, выпрямителя, интегратора, компаратора, на управляющий вход которого подано постоянное опорное напряжение, формирователя коротких импульсов, выход которого связан с первым входом интегратора, и дифференцирующей цепи, выход которой соединен с входом n-разрядного кольцевого счетчика с шифратором, выходы которого связаны с входами узла выборки и усилителя мощности, выходы которых соединены с управляющими входами АВП и концами секций, причем между выходом выпрямители и вторым входом интегратора включен регулятор тока.
Этот двигатель имеет в АВП узел коррекции формы, который поддерживает симметрично эпюры с выхода суммирующего усилителя и формирует управляющее напряжение для регулятора тока, включенного на входе интегратора. В этом двигателе узел коррекции реагирует только на форму сигнала с выхода суммирующего усилителя и позволяет быстро определить оптимальное положение ротора на всех стадиях работы машины. Однако форма этого сигнала, как правило, искажена и отличается от идеально симметричной. Например, при увеличении тока нагрузки двигателя значительно уширяются коммутационные импульсы в моменты переключения ключей выборки напряжения на входе узла АВП. Уширение коммутационных импульсов возникает также при пуске машины под нагрузкой (Мвал ≠ 0). Особенно это явление характерно в пазовых вентильных двигателях, которые характеризуются большими электромеханическими постоянными обмоток.
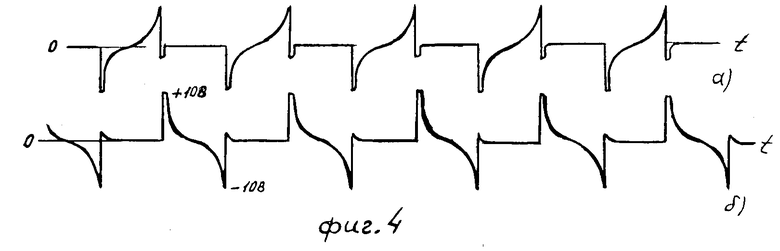
К тому же, в пазовых двигателях из-за зубцовых тяжений форма сигнала с выхода суммирующего усилителя существенно отличается от линейной пилообразной формы сигнала, характерной для беспазовых конструкций, и имеет нелинейный характер (фиг. 4 а, б). Последнее не позволяет эффективно применить математический алгоритм в узле коррекции и вообще сам узел коррекции, реагирующий только на форму входного сигнала. Неэффективность математической обработки следует из того, что дифференцирование выпрямленного нелинейного сигнала (для пазового двигателя) приводит к изменению амплитуды сигнала, поступающего на вход интегратора в узле коррекции. Это изменение амплитуды после интегрирования ведет к изменению постоянной составляющей на управляющем входе регулятора тока, что вносит ошибку в регулирование постоянной времени интегратора узла АВП. Вместе с этим уширенные коммутационные импульсы на входе узла коррекции воспринимаются последним как полезный сигнал и обрабатываются узлом коррекции, что приводит к появлению существенного отклонения управляющего напряжения на входе регулятора тока. Угол коммутации при этом получается не оптимальным. Отсюда следует, что использование узла коррекции для пазовых двигателей и в двигателях с большой электромеханической постоянной статора при Мвал ≠ 0 не эффективно, так как вносит существенную ошибку в определение оптимального угла коммутации. Это увеличивает пусковой ток в таких машинах и уменьшает их надежность.
Задача определения оптимального угла коммутации на всех стадиях работы машины в пазовых и беспазовых конструкциях статора в отличие от двигателя-прототипа в предлагаемом электродвигателе решается стабилизацией оптимального тока заряда емкости интегратора.
Целью изобретения является повышение надежности работы вентильного электродвигателя при больших моментах на валу в пазовом и беспазовом вариантах исполнения статора.
Цель достигается тем, что в вентильном электродвигателе, содержащем m-секционную обмотку якоря, концы секций которой связаны с информационными входами АВП, состоящего из последовательно связанных по входу-выходу ключей выборки напряжения, суммирующего усилителя, ключей выборки полярности, инвертора, выпрямителя, интегратора, компаратора, на управляющий вход которого подано постоянное опорное напряжение, формирователя коротких импульсов, выход которого связан с первым входом интегратора, и дифференцирующей цепи, выход которой соединен с входом n-разрядного кольцевого счетчика с шифратором, выходы которого связаны с входами узла выборки и усилителя мощности, выходы которого соединены с управляющими входами АВП и концами секций, между выходом выпрямителя и вторым входом интегратора включен регулятор тока, а АВП содержит узел следящей инверсной связи, первый вход которого соединен с выходом ключа выборки полярности и входом инвертора, второй вход с выходом другого ключа выборки полярности, а выход с управляющим входом регулятора тока так, что потенциал на входе регулятора тока изменяется синфазно с изменением потенциала на его управляющем входе. Узел следящей инверсной связи состоит из последовательно связанных инвертора и преобразователя разнополярных импульсов в постоянный регулируемый уровень в зависимости от разности площадей разнополярных импульсов, причем другой вход преобразователя является первым входом узла следящей инверсной связи, второй вход которого соединен с входом инвертора, а выход преобразователя является выходом узла следящей инверсной связи. В качестве преобразователя разнополярных импульсов применяется интегратор или используются последовательно связанные по входу-выходу аналого-цифровой преобразователь (АЦП), сумматор, цифроаналоговый преобразователь (ЦАП), причем входы АЦП являются входами преобразователя разнополярных импульсов, а выход ЦАП выходом преобразователя разнополярных импульсов.
Сопоставительный анализ заявляемого электродвигателя с прототипом позволяет утверждать, что узел следящей инверсной связи отсутствует в прототипе, т. е. заявляемый электродвигатель соответствует критерию "новизна". Анализ уровня техники, в частности аналогов (авт. св. СССР NN 1074361, 1360529 и Овчинников И.Е. Лебедева Н.И. Бесконтактные двигатели постоянного тока, Л. Наука, 1979, позволяет утверждать, что признаки из отличительной части формулы неизвестны в них, т.е. можно утверждать, что заявляемый вентильный двигатель имеет "изобретательский уровень".
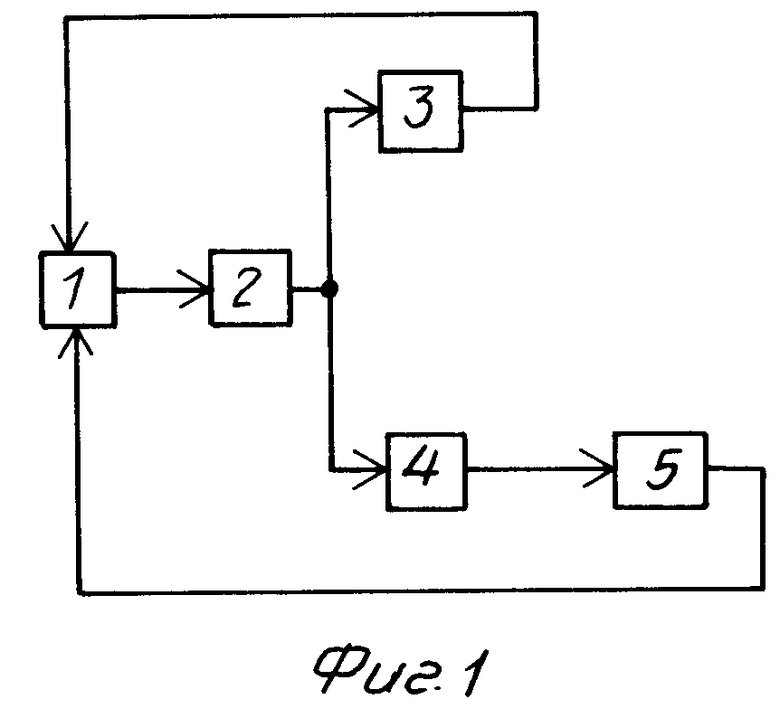
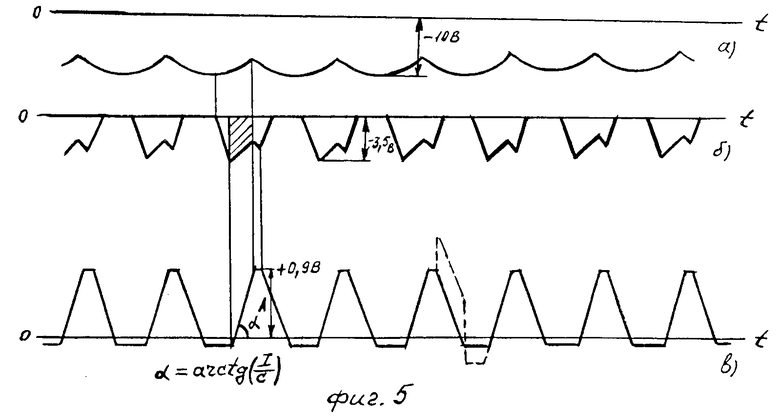
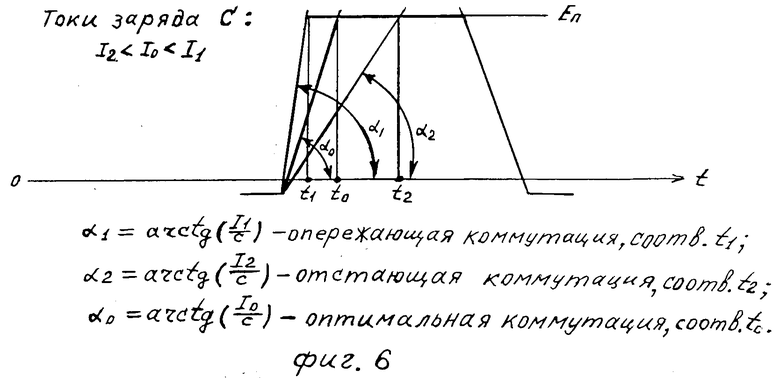
На фиг. 1 представлена структурная схема электродвигателя; на фиг. 2 его принципиальная схема; на фиг. 3 представлены эпюры управляющих сигналов для алгоритма коммутации силовых ключей в трехсекционном двигателе с реверсивным питанием секций и межкоммутационным периодом αк=π/3; на фиг. 4 а, б эпюры напряжений на входах 2 и 1 соответственно узла следящей инверсной связи (СИС); на фиг. 5а эпюры напряжений на выходе этого узла; на фиг. 5б эпюры напряжений на входе регулятора тока; на фиг. 5в эпюры напряжений на выходе интегратора; на фиг. 6 показана форма сигналов интегратора при разных токах заряда его емкости, приводящих к разным моментам срабатывания компаратора.
Электродвигатель содержит узел 1 АВП, кольцевой счетчик 2 с шифратором, узел 3 выборки, усилитель 4 мощности, обмотку 5 электродвигателя, ключи 6, 7, 8 выборки напряжения, ключи 9, 10 выборки полярности, суммирующий усилитель 11, инвертор 12, выпрямитель 13, регулятор 14 тока, интегратор 15, компаратор 16, формирователь 17 коротких импульсов, дифференцирующую цепь 18, узел 10 СИС, инвертор 20, преобразователь 21 разнополярных импульсов в постоянный регулируемый уровень, кольцевой счетчик 22, шифратор 23 (фиг. 2).
В таблице приведен алгоритм коммутации силовых секций трехсекционного двигателя без датчиков положения, обеспечивающий за шесть тактов кольцевого счетчика оборот ротора в π рад.
Из фиг. 6 видно, что при изменении тока заряда этой емкости изменяется время срабатывания компаратора 16, имеющего постоянный порог срабатывания Eп. Поэтому при появлении ошибки на управляющем входе регуляторы 14 тока, как описано выше, ток заряда емкости интегратора изменяется и отклоняется от оптимального. На фиг. 6 оптимальный ток заряда Iо больше тока I2, соответствующего запаздывающей коммутации (t2), и меньше тока I1, соответствующего опережающей коммутации (t1). Оптимальная коммутация соответствует моменту времени t0.
При включении питания схемы управления электродвигателя регулятор 14 тока находится в режиме малого тока (закрыт), поэтому постоянная времени заряда конденсатора в интеграторе 15 велика и на выходе узла 1 АВП присутствуют короткие импульсы с малой частотой следования (10-11 с-1). Эти импульсы поступают на счетный вход кольцевого счетчика 22 и тактируют его. В исходном состоянии все разряды кольцевого счетчика 22 обнулены, кроме последнего разряда α*. Сигналы с инверсных выходов этого счетчика через шифратор 23 поступают на соответствующие входы усилителя 4 мощности и на соответствующие входы узла 3 выборки (см. фиг. 2). Последний формирует сигнал выборки напряжения L, который открывает ключ 6, и сигнал выборки полярности "+", который открывает ключ 10. При этом ток от источника питания +Eпит протекает через пару фаз обмотки 5 двигателя. Этот ток создает магнитное поле, взаимодействующее с магнитным полем ротора. Ротор начинает поворачиваться и наводит в первой (незапитанной) фазе обмотки 5 ЭДС Е1, которая через открытый ключ 6 поступает на усилитель 11 и далее через ключ 10 (открытый сигналом "+"), выпрямитель 13, регулятор 14 тока интегрируется интегратором 15. Если интеграл наведенной ЭДС достигает уровня порогового напряжения Еп, которое подается на компаратор 16, то это означает, что ротор двигателя занял определенное положение (точнее магнитные оси ротора ориентированы соответственным образом по отношению к фазам обмотки 5 двигателя). При этом выходным сигналом формирователя 17 интегратора 15 приводится в исходное состояние, а дифференцирующая цепь 18 выдает импульс на тактовый вход счетчика 22. Логическая "1" из последнего разряда счетчика 22 переносится в первый разряд β*, поэтому с выхода шифратора 23 на усилитель 4 мощности поступает управляющий сигнал на включение следующей пары фаз обмотки 5 двигателя, а с выхода узла 3 выборки формируются сигналы I и "-", которые открывают соответственно ключи 7 и 9. На этом такте коммутации ток протекает через две фазы обмотки 5, а ЭДС наводитcя в третьей фазе. При этом знак этой ЭДС меняется, поэтому для ее нормального детектирования требуется инверсия (инвертор 12). После детектирования, интегрирования и сравнения Е2 с выхода узла АВП поступает сигнал на подключение следующей пары фаз обмотки 5. Этот алгоритм повторяется через каждые шесть тактов кольцевого счетчика 22, и за двенадцать тактов осуществляется полный оборот четырехполюсного ротора (см. таблицу).
Изменение скорости вращения ротора приводит к изменению амплитуды ЭДС, наведенной в незапитанных фазах двигателя, а также к изменению временного положения этой ЭДС, и, следовательно, выходная частота узла 1 меняется.
Для надежного запуска электродвигателя, обеспечения оптимального положения ротора (т.е. такого, при котором ток, потребляемый ВД минимален) в широком диапазоне изменения скорости вращения, а также для поддержания неизменным оптимального положения ротора при увеличении момента на валу двигателя от холостого хода до Мном и выше используются постоянное напряжение смещения Есм, подаваемое на один из входов интегратора 15, регулятор 14 тока, включенный между выходом выпрямителя 13 и одним из входов интегратора 15, узел 19 СИС, включенный между выходами ключей 9, 10 выборки полярности и управляющим входом регулятора тока.
В предлагаемом электродвигателе для определения и стабилизации оптимального тока заряда емкости интегратора 15 и определения оптимального угла коммутации на всех стадиях работы машины используется узел 19 СИС, который в отличие от узла коррекции в прототипе не реагирует на форму входного сигнала и уширенные коммутационные импульсы. Узел СИС состоит из инвертора 20 и преобразователя 21. Последний преобразует входные разнополярные импульсы (с простой пилообразной формой для беспазового двигателя либо со сложной нелинейной формой для пазовой машины) в постоянный уровень, изменение величины которого вызывает синфазное изменение амплитуды сигнала с выхода выпрямителя 13.
Работу узла СИС рассмотрим на примере, когда в качестве преобразователя 21 в простейшем случае применяется интегратор. На фиг. 4 а, б изображены эпюры напряжений на выходах ключей 10 и 9 выборки полярности соответственно. Выход ключа 10 (прямой канал) соединен через инвертор 20 с одним входом преобразователя 21, а выход ключа 9 (инверсный канал) связан без инверсии с другим входом преобразователя 21. Выход последнего соединен с управляющим входом регулятора 14 тока. Такое включение позволяет получить взаимно инверсные сигналы по прямому и инверсному каналам на одноименных входах выпрямителя 13 и преобразователя 21. Поскольку на входах выпрямителя 13 и на входах преобразователя 21 сигналы суммируются (аналогично сигналам на входе усилителя 11), то на их выходах происходит синфазное изменение сигналов. Преобразователь 21 не реагирует на форму входных разнополярных импульсов, а только на разность площадей под ними (например, интегратор).
В качестве более точного (но и более сложного) преобразователя 21, реагирующего на разность площадей разнополярных импульсов на входах узла СИС, можно использовать последовательное соединение АЦП, цифрового сумматора и ЦАП. Сигналы последнего пропорциональны разности площадей разнополярных импульсов. Поэтому при равенстве площадей положительной части импульса и отрицательной части (этот факт соответствует симметрии эпюры напряжения на выходе суммирующего усилителя 11 и, значит, оптимальному углу коммутации двигателя на выходе преобразователя 21 имеем нулевой уровень (либо ненулевой, но постоянный уровень при наличии смещения в преобразователе 21). При любой асимметрии эпюр с выхода усилителя 11 на выходах ключей 9, 10 появляются импульсы, у которых площади положительной и отрицательной частей не равны. Это неравенство преобразуется в преобразователе 21 в смещение постоянного уровня таким образом, что, например, при уменьшении амплитуды отрицательных импульсов с выхода выпрямителя 13 (фиг. 5б) отрицательный уровень на выходе преобразователя 21 (фиг. 5а) также понижается и наоборот. Для наглядности действия СИС на фиг. 5а показана эпюра напряжения на выходе преобразователя 21, в качестве которого использован интегратор с небольшой постоянной интегрирования. При большой постоянной интегрирования (времени преобразования преобразователя 21) куски парабол на фиг. 5а превращаются в горизонтальную линию, и регулирование в узле СИС осуществляется аналогично при горизонтальном участке вершин импульсов на фиг. 5б. Следовательно, меняя коэффициент усиления выпрямителя (в двигателе-прототипе этим добивались нормализованности выходного сигнала выпрямителя 13), можно изменить (сместить) исходный постоянный уровень на выходе преобразователя 21 (при наличии сигналов на входах ключей 6, 7, 8) и настроить исходно регулятор 14 тока в режим малого тока.
Итак, в области интегрирования интегратором 15 имеем за счет действия СИС сначала уменьшение амплитуды отрицательного импульса на входе регулятора 14 тока. При этом отрицательное напряжение на управляющем входе регулятора тока уменьшается и, значит, этот регулятор приоткрывается, сохраняя свой входной ток. Когда заряд конденсатора этим током в интеграторе 15 заканчивается, отрицательное напряжение на выходе регулятора увеличивается (фиг. 5а), регулятор призакрывается, а его входное отрицательное напряжение растет, отслеживая форму сигнала на его управляющем входе. При этом входной ток регулятора вновь неизменен. Последнее приводит к появлению горизонтальной "полки" на вершине выходного импульса интегратора 15. Эта "полка" по времени совпадает с коммутационными импульсами и полностью перекрывает их на временной оси. Длительность "полки" пропорционально растет по мере увеличения тока нагрузки двигателя. При увеличении тока нагрузки коммутационные импульсы уширяются, амплитуда импульсов на входе регуляторе тока уменьшается (из-за уменьшения скорости двигателя) и отрицательное напряжение на управляющем входе регулятора уменьшается, открывая его, т.е. входной ток регулятора не изменяется. Поэтому ток заряда емкости интегратора постоянен и не зависит от изменения амплитуды импульсов на входе регулятора тока (угол наклона α на фиг. 5в) и от уширения коммутационных импульсов ("полка", фиксирующая амплитуду A на фиг. 5в). "Полка" появляется из-за того, что заряд емкости интегратора 15 закончился и сохраняется, так как поступил импульс сброса с формирователя 17, но сброс еще не произошел, а на входе регулятора 14 тока присутствует еще часть импульса, которая совпадает по времени с коммутационным импульсом, не несущим полезной информации о положении ротора. Эта часть импульса (по сути коммутационный импульс) отрабатывается узлом СИС, фиксируя амплитуду импульсов интегратора 15 на уровне A.
Итак, применение узла СИС для управления регулятором 14 тока приводит к тому, что потенциалы на выходах выпрямителя 13 и преобразователя 21 изменяются синфазно и потенциал на входе регулятора тока отслеживает все изменения потенциала на его управляющем входе так, что входной ток регулятора не изменяется, т. е. угол наклона и амплитуда импульсов A интегратора 15 (фиг. 5в) строго постоянны и не зависят от изменения скорости двигателя в широких пределах, от появления широких коммутационных импульсов (при увеличении тока нагрузки), от линейности эпюр на выходе суммирующего усилителя 11 (нелинейность характерна для пазовых машин). Во всех этих случаях угол коммутации оптимален (т.е. ток потребления двигателя минимален). Все что происходит за пределами рабочей области интегрирования (область штриховки на фиг. 5б) в интеграторе 15 не влияет на процесс интегрирования. Например, можно, изменив режим сброса интегратора 15 (или по другой причине), изменить форму импульса вне зоны интегрирования (см. пунктир на фиг. 5в).
Однако это изменений формы импульса не влияет на срабатывание компаратора 16 в необходимый момент времени и, значит, на определение оптимального угла коммутации. Ситуации с перекосом сигнала на выходе суммирующего усилителя из-за отстающей или опережающей коммутации (возможно при пуске двигателя) приводят к появлению сигналов с выходов ключей 9, 10, имеющих разную площадь в положительной и отрицательной частях, что немедленно (с быстродействием преобразователя 21) ведет к изменению выходного сигнала узла СИС, изменяет входной потенциал регулятора 14, не изменив его входного тока, а значит, угол коммутации при этом оптимален.
Все случаи с неправильным начальным вращением, кратковременным заклиниванием ротора приводят к кратковременной остановке двигателя (так как кольцевой счетчик 22 тактируется в одном направлении), а затем происходит автоматически повторный запуск машины, так как регулятор 14 находится всегда в режиме малого тока (выставляется регулировкой коэффициента усиления выпрямителя 13), а узел СИС определяет оптимальное положение ротора достаточно быстро (со скоростью срабатывания преобразователя 21).
Исходя из описания работы узла СИС совместно с узлами 13, 12 и 14 можно сделать вывод, что регулятор 14 тока по сути, в таком включении его управляющего входа, является линейным регулируемым сопротивлением. Это сопротивление меняет свою величину синфазно с величиной входных сигналов, поступающих на его вход. Эта синфазность обеспечивает стабильность тока заряда конденсатора в интегратор 15 и оптимальность угла коммутации на всех стадиях работы двигателя при Мвал ≠ 0, Мвал0 в пазовых и беспазовых вариантах машины.
Технические преимущества предлагаемого электродвигателя по сравнению с прототипом заключаются в том, что применение узла СИС позволяет определить и стабилизовать оптимальный ток заряда конденсатора интеграторе 15, соответствующий оптимальному углу коммутации, независимо от линейности сигнала на выходе суммирующего усилителя 11 для разных конструкций (пазовые, беспазовые) в широком интервале токов нагрузки (появление уширенных коммутационных импульсов, как описано выше). Это существенно повышает надежность работы двигателя как в пазовом варианте, так и в беспазовом во всем диапазоне рабочих токов машины.
Был изготовлен электродвигатель в пазовом варианте с максимальной габаритной мощностью 4 кВт (номинальная мощность 1,5 кВт, напряжение питания 220 В, сопротивление фазы 30МА, номинальная скорость вращения четырехполюсного ротора из NeFeB диаметром 60 мм, длиной 60 мм 4000 об/м). Этот двигатель, в котором использован узел СИС, предназначается для применения в серийных деревообрабатывающих станках, где требуются различные режимы обработки материала (регулирование скорости), повышенная надежность работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1982 |
|
RU1074361C |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
| Устройство для частотного пуска и синхронизации с сетью синхронного электродвигателя | 1983 |
|
SU1112516A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2020717C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |
| Устройство для управления бесконтактным электродвигателем постоянного тока | 1981 |
|
SU1020951A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Электропривод постоянного тока | 1982 |
|
SU1080242A1 |
| Устройство для контроля и регулирования производительности | 1990 |
|
SU1791032A1 |


Использование: в серийных деревообрабатывающих стенках, где необходимы двигатели высокой надежности с большим моментом на валу в пазовом и беспазовом вариантах исполнения статора. Сущность: в вентильном электродвигателе амплитудно-временной преобразователь 1 содержит регулятор 14 тока, включенный между выходом выпрямителя 13 и основным входом интегратора 15, узел 19 следящей инверсной связи, входами соединенный с выходами ключей 9,10 выборки полярности, а выходом с управляющим входом регулятора 14 тока. В процессе работы обеспечивается оптимальный ток в интеграторе 15, который можно стабилизировать за счет того, что регулятор 14 тока при указанном включении выполняет функцию линейного регулируемого сопротивления. В результате обеспечивается оптимальный угол коммутации ключей вентильного электродвигателя, что приводит к повышению надежности работы вентильного двигателя как в пазовом, так и в беспазовом его варианте во всем диапазоне рабочих токов двигателя и глубоком изменении скорости вращения ротора. 3 з. п. ф-лы, 6 ил.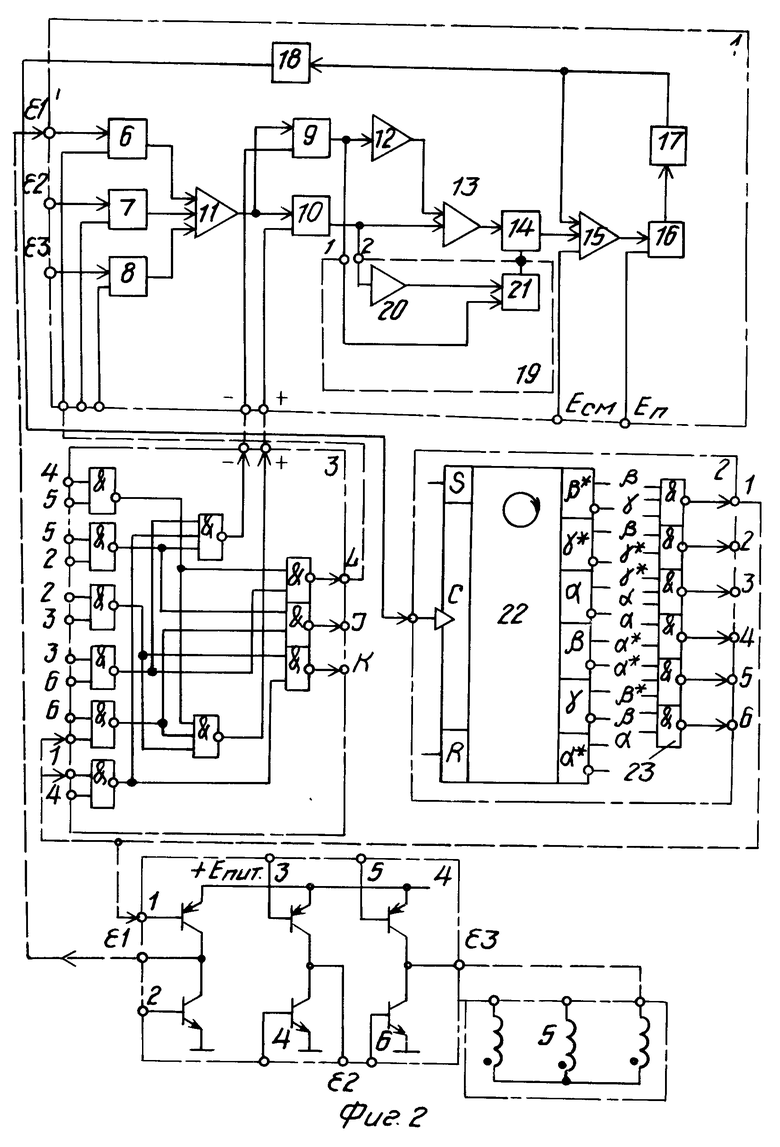
| Патент США N 4162435, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
