Изобретение относится к электротехнике и может найти применение в бескон тактных электроприводах постоянного тока. Известно устройство Для управления бесконтактнь1м двигателем постоянного тока, содержащее УМ -фазный коммутатор и совмещенный с ним регулятор, причем регулятор выполнен многоканальным, а регулирующие элементы коммутируются под совместным воздействием управления от датчиков положения ротора и от широ но-импульсного модулятора-распреДели те ля TI. Однако известное устройство имеет тот недостаток, что состоит из км-фегу- ля торов, каждый из которых является мн гоканальным. При работе устройства одновременно коммутируются регулирующие элементы только одного регулятора, в то время как (JTJ-) регуляторов ждут своей очереди (до момента поступления соответствующего сигнала от датчика по ложения ротора). Все это приводит к тому, что суммарные габариты регуляторов велики. При управлении высокоэффективной, базпазовой электрической машиной с индуктором на основе постоянньхх магнатов из редкоземельных элементов (например, на основе сплава самарий-кобальт) в отдельных сл чаях весь выигрьпи по критерию - удельные энергетические показатели, достигаемый применением способа многоканаль- н ого управления (в отличие от одноканального управления),- сводится на нет.в }у -фазном коммутаторе за счет до оинительных комплектов регуляторов, работающих каждый /кичастъ периода. Вторым недостатком является то, что /Ий уменьшения пульсаций тока необходимо увеличить индуктивность дополнительных дросселей, что сдерживается увеличением постоянной времени цепи якоря, влияющих на фазовый сдвиг между током и напряжением на фазе двигателя. Наиболее близким по своей технической сущности к предлагаемому и реализу ющим известный способ управления бесконтактным электродвигателем постоянно го тока является устрсйство для управления бесконтактным электродвигателем постоянного тока, содержащее импульсный регулятор, выполненный в виде параллельно соединенных } силовых каналов с регулирующими ключами, управляющие входы которых через соответствующие К) каналов широтно-импульсного модулятора-распределителя связаны с выходом узла сравнения скорости, два входа которого соединены соответственно с задатчиком и датчиком скорости 2 В известном устройстве регулятор позволяет осуществить регулирование скорости и момента электрической машины. Однако, поскольку регулятор вьтолнен многоканальным, он обеспечивает регулирование с пониженными помехами в сеть и радиоизлучениями в окружающее пространство при достаточно высоких удельных энергетических показателях. Необходимость применения многоканального принципа построения силового широтно-импульсного регулятора диктуется потребностью повышения удельных показателей за счет повышения эквивалентной частоты переключения и, следовательно, снижения пульсации тока на частоте переключений, в связи с тем, что сов - ременная элементная база полупроводниковых переключателей не может обеспечить потребную частоту переключений с приемлемой собственной энергетикой. : Устройство, реализующее известный способ, позволяет обеспечить высокие энергетические показатели в ограниченном диапазоне регулирования скорости вращения. В следящем приводе диапазон регулирования определяется как диапазоном изменения потребной.скорости вращения, так и дагапазоном изменения момента нагрузки и потребного динамического момента. Резкое увеличение динамического диапазона регулирования приводит к тому, что в устройстве, реализующем известный способ, при определенных соотношениях скорости и нагрузки существенно ухудшается энергетика как электрической машины, так и электронного регулятора. Особенно это проявляется для беспазовых электрических машин с редкоземель- . чаамк магнитами, у которых существенно мала электрическая постоянная времени и низкое сопротивление обмотки. Цель изобретения - повышение удельных энергетических показателей двигателя и регулятс а и снижение помех в сети и радиопомех. Поставленная цель достигается тем, что в устройство для управления бесконтактным электродвигателем постоянного тока, преимущественно с беспазовой обмоткой якоря, содержащее импульсный регулятор, выполненный в виде параллельно соединенных tl силовых каналов с регулирующими ключами, управляющими ключами, управлякшще входы которых через соответствуюшие М каналов широтно-импудьсного модулятора-распределителя связаны с выходом узла сравнения скорости, два входа которого соединены соответствешю с аадатчиком и датчиком скорости, введены N первых сумматоров с суммирующими и вычитающими входами, N вторых сумматоров с двумя, суммирующими входами, М усилителей, каждый N силовой канал импульсного регулятора - выполнен в виде блокирующего диода и цепи из последовательно соединенных дросселя и датчика тока, подключенных к выходу регулирующего ключа, а каждый вход широтно-импульсного модулятора-распределителя связанс выходом узла сравнения скорости через последовательно соединенные второй сумматор, усилитель и первый сумматор, вычитающий вход которого подключен к выходу соответствующего датчика тока, а суммирующие входы первых сумматоров и вторые входы вторых сумматоров объединены между собой.
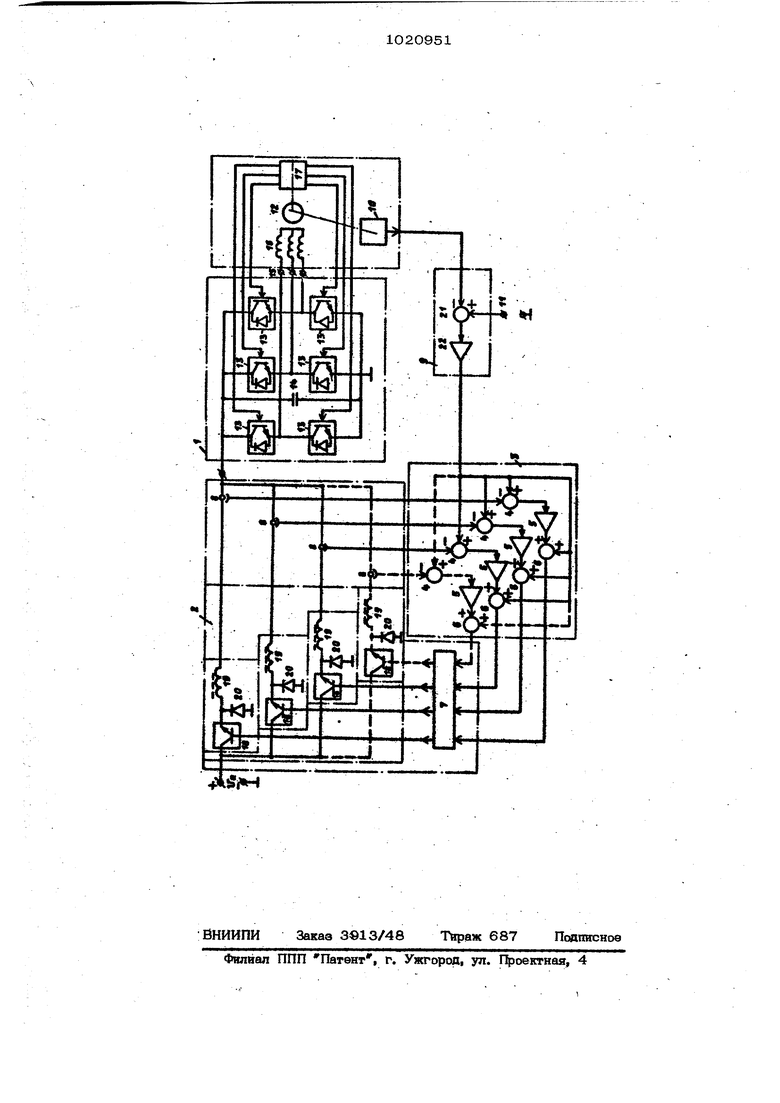
На чертеже представлена функциональная схема устройства для управления .бесконтактным двигателем постоянного тока.
Устройство содержит полупроводниковый коммутатор 1, соединедный cN-канальным импульсным регулятором 2, N -канальный блок 3 сравнения тока, каждый канал которого выполнен в виде последовательно соединенных первого сумматора 4, согласукмцего усилителя 5 и второго сумматора 6, выход которого через соответствукяаий канал VJ-канального широтно-импульсного модулятора-распределителя 7 подключен к входу одного из каналов импульсного регулятора 2, выход каждого из которых через соответствующий датчик 8 тока подключен к первому входу соот:ветствующего первого сумматора 4, вторые входы сумматоров 4 и 6 соединены с выходом блока 9 сравнения скорости, подключенного к датчику 1О и аадатчику 11 скорости вращения ротора 12 двигателя.
Комк татор 1 состоит из попупроводниковы х ключей 13 и демпфирующего конденсатора 14. Выходы 15 коммутатора 1 соединены с секциями 16 обмоток якоря двигателя; чувствительные элементы датчика 17 положения ротора соединены с управляющими входами ключей 13.
К(аждый канал импульсного регулятора 2 содержит управляемый ключ 18, дроссель 19 и блокирующий диод 2О. Блок 9 сравнения скорости состоит из сумматора 21 и усилителя 22.
Коммутатор 1 может быть построен по любой схеме, как однополупериодным, так и двухполупериодным (мостовым), с любьп л числом фаз (секций обмотки электродвигателя). Для более конкретного пояснения сущности изобретения на чертеже изображен трехфазный мостовой коммутатор. Его полупроводниковые ключи показаны условно как транзисторы и щун- тирующие их коплостор-эмиттерные пере;ходы обратные диоды. То же самое отно|сится к изображениюуправляемых ключей 18 регулятора 2, котор ле условно показаны как транзисторы, Модулятор аспре- делитель 7 выпсяняет |ункциюраспределения по каналам импульсе управления сдвинутых круг от друга на временной интервал, кратный Т/М, где Т - пернод повторения импульсов, а N - число каналов и широтно-импульсно модулированных в соответствии с аналоговыми сжгнапами, поступакяцики на его входы.
Устройство работает следующим образом.
Коммутатор 1 посредством ключей 13 обеспечивает переключение секций 16 обмотки якоря двигателя в соответствии с угловым положением ротора 12 по сигналам, поступающим с датчика 17 положения ротора на управляющие входы ключей 13. При этом алгоратм коммутации может быть любым из известных и при.меняемых в бесконтактных двигателях. Например, можно для данного случая трехфазной обмотки, соединенной в звездочку - угол коммутации каждой секции устанавливать в 12О эл. град., а интервал коммутации - в 60 эл. град. Конденсатор 14 необходим для демпфирования переходных процессов прн коммутации ключей 13.
В щиротно-импупьсвом модуляторе распределителе 7 в каждом из N каналов входной аналоговый сигнал сравнивается с линеаризованным сигналом, в результате чего формируется импульс управления с коэффициентом заполнения, равнымЬ « fT где fc -f длительность сформированного импульса, Т - период повторения линеаризованного сишада. Сфор шрованный вмпульс поступает на вход соответствующего канала регулятора 2 и обеспечивает включение ключа 18 на время длительности импульса управления. Поскольку в модуляторе 7 лвнеаризованные сигналы сдвинуты относительно друг друга на интервалы времениТ|М, то коммутация ключей происходит с соответствующим сдвигом 510 BO времени с коэффициентом заполнения, определяемым входным аналоговым сигналом данного канала Коэффициент заполнения может, в зависимости от управляющего воздействия, поступающего с задатчика 11 скорости меняться от О до 1, Коммутация ключей 18 регулятора 2 происходит на существенно более высокой частоте, чем коммутация ключей 13 коммутатора 1. Эта частота определяется в зависимости от постоянной времени ТГ-э эквивалентной электрической цепи из ус- ловияТ/Tp«l (порядка 0,1 и менее). В беспазовых электрических машинах электрическая постоянная времени секций якоря очень мала, что может потребовать существенного увеличения частоты коммутации (1/Т), сдерживаемого частотными свойствами силовой элементной базы. Уве личениюТд способствует включение дросселей 19, при этом они не вызывают сдвиг тока якоря относительно фазного напряжения, так как включены во внешней цепи по отношению к коммутатору 1. Блок 9 сравнения скорости формирует аналоговый сигнал в соответствии с разностным сигналом, сформированным из двух сигналов: от задатчика 11 скорости и датчика 10 скорости. Этот сигнал поступает на блок 3 сравнения тока, соответствующим образом (см. ниже) корректируется идалее поступает на соот ветствующие входы модулятора 7, с выхода которого поступают управляющие импульсы. Если ток в OMIOM из каналов в силу ряда причин (влияние формы магнитной индукции, отклонение ъыхоряой крутизны канала от среднего значения, внешнее воз мущение в виде кратковременной просадки напряжения питания и т. Д.) отклонился от среднего значения это фиксируется Датчиком тока, с выхода которого поступает сигнал, который талчнтается из 45 нию
сигнала, поступающего от блока сравнени скорости; разностный сигнал усиливает ся и суммируется с основным (от блока сравнения скорости); далее суммарный сигнал поступает на соответствующий вход модулятора 7. Отрицательная обрат ная связь по току является по сущестщусловной, так как работает только при условии принципиального различия в параметрах регулятора. Это позволяет
Таким образом, введение дополнительных среозтв в многоканальное устркойство управпения бесконтактным электродвигателем постоянного тока позволяет без су-. жения заданного динамического двапазог на регулирования повысить удельные энергетические показатели системы регулятор-двигатель nc снизить уровень помех в сеть и ради(Я1Омех в окружающее пространство. 51 проектировать ее с достаточно низким коэффициентом усиления усилитедя 5 без снижения выходной крутизны каналов регулятора. При отрицательной традиционной обратной связи по току снижения выходной крутизны можно компенсировать увеличением коэффициента усиления усилителя 5 (для сохранения широкого диапазона оптимальных энергетических режимов), что не всегда целесообразно, так как увеличение коэффициента в цепи обратной связи сдерживается соображениями необходимого запаса по устойчивости как к внутренним, так и внешним возмущающим, воздействиям; Схема с двумя сумматорами устанавливает эквивалентную среднюю крутизну в каждом канале равней .. ое измерительное сопротивление дат.jjj тока, при условии К. 1 и Ос 1 I ГД6 радаальная выходная крутизна любого из М каналов регулирования.. Поскольку ROC ,-г то это соответствует .тому, что все каналы имеют одинаковую крутизну, а следовательно, при одинаковом сигнале управления, поступающем от блока сравнения скорости, это соответствует условию выравнивания токов в каждом канале. Такое выравнивание токов приводит к тому, что, во-первых, существенно уменьщается отклонение от среднего тока, что ведет к - существенному уменьщению потерь как в регуляторе, так и в машине, и способствует повыщению удельных энергетических показателей всей системы, не сужая динамического диапазона регулирования; во-вторых, уменьшение пульсаций тока приводит к уменьщению помех в сети и радиопомех, что обеспечивает не только кондвЕШкжирсжание сети, но снижает габариты фильтра регулятора и, в конечном счете, также приводит к повышеудельных энергетических показателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления бесконтактным двигателем постоянного тока | 1980 |
|
SU892593A1 |
| Вентильный двигатель | 1983 |
|
SU1130970A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| Цифровой электропривод постоянного тока | 1989 |
|
SU1644347A1 |
| Вентильный электродвигатель | 1985 |
|
SU1259430A1 |
| Устройство для управления вентильным электродвигателем | 1987 |
|
SU1443113A1 |
| ПРЕЦИЗИОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2123756C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| Устройство для управления бесконтактным двигателем постоянного тока | 1980 |
|
SU904136A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОЮ ТОКА, преимушествевно с беспааовой обмоткой якоря, содержащее импульсный регулятор, BI попйенный в виде параллельно соединенных Ы (УЮ1ОВЫХ. каналов с регулирующи-. мн ключами, управляющие входы которых через соотв тствукжоие каналов широт но-импульс ого модулятора-распределителя связаны с выходом уйла сравнения скорости, два входа которого соединены соответственно с задатчиком и датчикш скорости, отличающееся тем, что, с цепью повышения удельных энер)гетических показателей двигателя и регулятора и снижения тюмек в сети и радиопомех, в него введены N .первых сумматоров с суммирукиаими и вычитающими входами Н BTOIXJX сумматоров с двумя суммирующими входами, усилителей, каждый Н силовой канал импульсного ре гулятора выполнен в виде блокирукяцего диода и цепи из последовательно соединенных дросселя я датчика тока, подключенных к выходу регулирующего ключа, а каждый вход широтно-импульсного модулятора-распределителя связан с выход уала сравнения скорости через последовательно соединенные бторой суммато, усилитель и первый сумматор, вычитающий вход которого подключен к выходу соответствукяцего датчика тока, а суммирующие входы первых сумматоров и вторые входы вторых сумматоров объединены между собой. ьэ о со О1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Управляемый трехфазный коммутатор | 1980 |
|
SU884000A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления бесконтактным двигателем постоянного тока | 1980 |
|
SU892593A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
