Изобретение относится к устройствам автоматического подсчета количества изделий, перемещаемых с произвольной скоростью, и предназначено для подсчета (учета) предметов, перемещаемых по конвейеру.
Известно устройство для подсчета изделий [1] содержащее фотодатчики (имеются в заявляемом объекте), усилители (приемник в заявляемом объекте), элементы ИЛИ, дифференцирующие элементы, RS-триггер, D-триггер, элементы И, счетчик, причем выход первого дифференцирующего элемента подключен к установочному входу второго D-триггера, выход второго дифференцирующего элемента соединен с установочным входом первого D-триггера. В аналоге за счет отсутствия возможности определения обратного движения предметов, фальсификации счета, обнаружения нештатных ситуаций невозможно достижение технического результата заявляемого объекта.
Наиболее близким техническим решением к заявляемому по технической сути является счетчик предметов [2]
Система подсчета предметов одинаковых размеров, движущихся вдоль производственной линии, исключает влияние вибраций при движении предметов на результаты подсчета. Система содержит два чувствительных устройства, установленных одно за другим вдоль линии и служащих для создания сигналов, определяющих присутствие или отсутствие предмета в зоне чувствительных устройств, которые расположены на расстоянии друг от друга; расстояние зависит от размеров предмета и должно быть достаточно малым, чтобы оба чувствительных устройства могли фиксировать одновременно один и тот же предмет, но не фиксировали два различных предмета одновременно. В то же время это расстояние должно быть достаточно большим, чтобы чувствительные устройства не изменяли свое состояние одновременно. Сигналы чувствительных устройств подаются на входы логической подсистемы, которая определяет четыре состояния. При нейтральном состоянии ни одно из чувствительных устройств не выдает сигнала присутствия предмета. В состоянии счета в прямом направлении только первое чувствительное устройство вырабатывает сигнал присутствия предмета. В состоянии подтверждения счета в прямом направлении оба чувствительных устройства генерируют сигнал присутствия предмета. В состоянии счета в обратном направлении только второе чувствительное устройство создает сигнал присутствия предмета. Логическая подсистема содержит схемы для образования выходного сигнала счета в прямом направлении, если имеет место переход от третьего состояния к четвертому. Прототип имеет следующие общие существенные признаки с заявляемым объектом: датчики и логическую подсистему, включающую приемник, блок определения реверса и счета.
Недостатком прототипа является относительно низкая точность счета и невысокая надежность.
Перед авторами стояла задача разработать систему по учету и регистрации штучной продукции, перемещаемой конвейером с приемлемыми для пользователя показателями точности счета и надежности функционирования, а также с достаточным уровнем сервисного обслуживания.
Технический результат заключается в повышении точности счета, обнаружении нештатных ситуаций, например фальсификации счета, и повышении надежности системы посредством расширения ее диагностических возможностей.
Чувствительный элемент датчика выполнен в виде фотоприемников и излучателей.
Введение в логическую подсистему блока формирования синхронизации и передатчика, блока определения временных характеристик сигнала, блока дублирования каналов и блока распознавания аварийных ситуаций обеспечивает достижение технического результата.
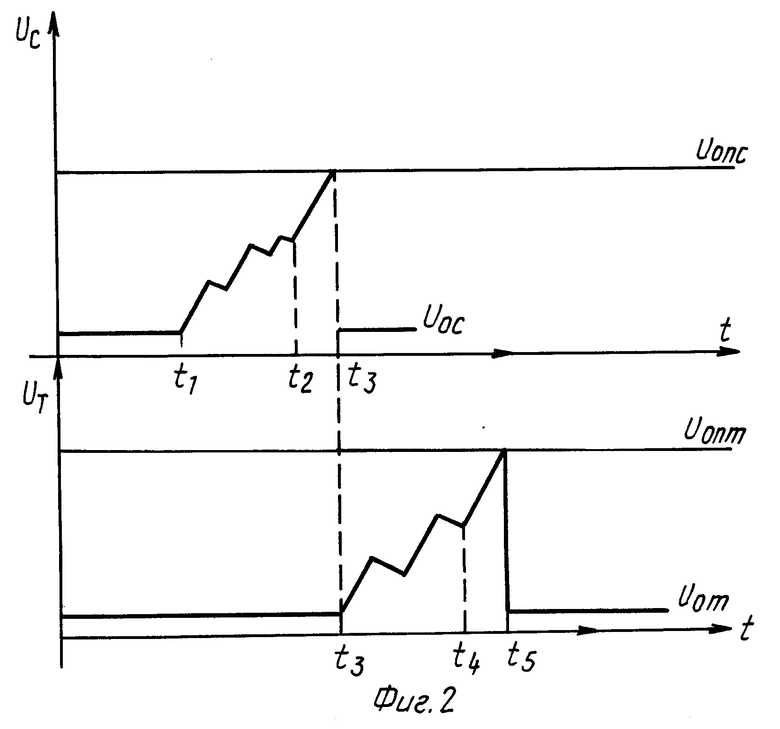
Поясним повышение точности системы по сравнению с прототипом диаграммами, представленными на фиг. 2.
В исходном положении счетчика тени и света блока определения временных характеристик сигнала находятся в состоянии Vот и Vос соответственно. Работа указанных счетчиков осуществляется последовательно. Предположим, что предмет счета выходит из оптического канала, совершая колебания или вибрируя. Указанному процессу соответствует участок t1-t2 на диаграмме. После устойчивого выхода из оптического канала, что соответствует участку t2-t3, счетчик света достигает порогового значения Vопс (момент t3) и переходит в состояние Vос. Одновременно разрешается работа счетчика тени. Участок t3-t4 на диаграмме соответствует входу предмета счета с колебаниями в оптический канал. После устойчивого входа (интервал t4-t5) счетчик тени достигает порогового значения Vопт (момент t5), на основании чего блок определения временных характеристик сигнала принимает решение о прохождении предмета счета через один из каналов датчика, о чем сообщается в блок определения реверса и счета и в блок дублирования канала. Работа блока определения временных характеристик сигнала по второму каналу датчика аналогична вышеуказанной, после чего блок определения реверса и счета принимает решение о прохождении предмета счета, отслеживая последовательность срабатывания каналов датчика, изменяя соответствующим образом свое состояние. В прототипе анализ временных параметров сигнала отсутствует, что существенно снижает точность системы.
Блок дублирования каналов, отслеживая и анализируя срабатывание канала датчика по сигналам блока определения временных характеристик сигнала, принимает решение о работоспособности того или иного канала датчика, в определенных ситуациях позволяет делать вывод о преднамеренном вмешательстве в работу датчика. Аналогичные выводы при одновременном закрытии каналов датчика принимаются блоком распознавания аварийных ситуаций. Наличие этого блока позволяет определять неисправности в работе передатчика, повышенную нагрузку на линиях связи как следствие короткого замыкания, а также диагностировать работоспособность датчиков при передаче циклового импульса. Немаловажным фактором повышения надежности системы является дублирование счета посредством параллельной работы блока определения реверса и счета и блока дублирования каналов. При нарушении функционирования одного из оптических каналов и (или) неработоспособности блока определения реверса и счета счет ведет блок контроля дублирования каналов.
На фиг.1 приведена схема системы для подсчета предметов;
на фиг.2 диаграмма работы системы;
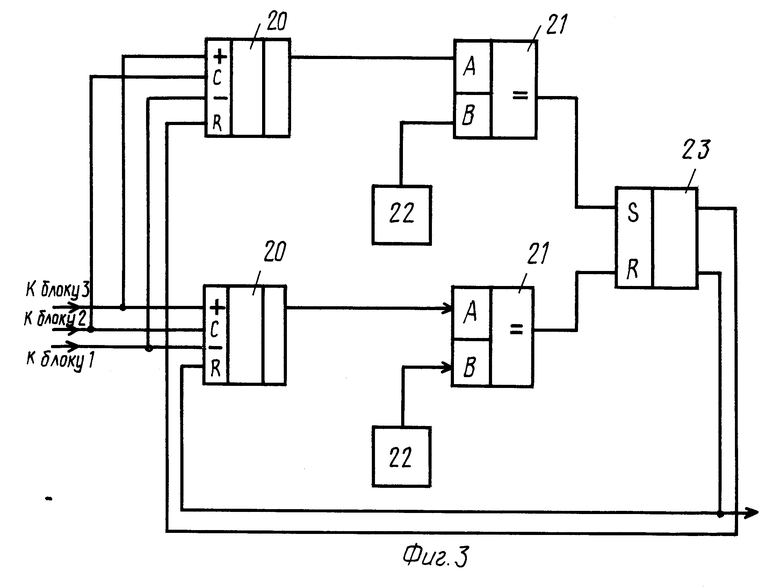
на фиг.3 схема блока определения временных характеристик сигнала;
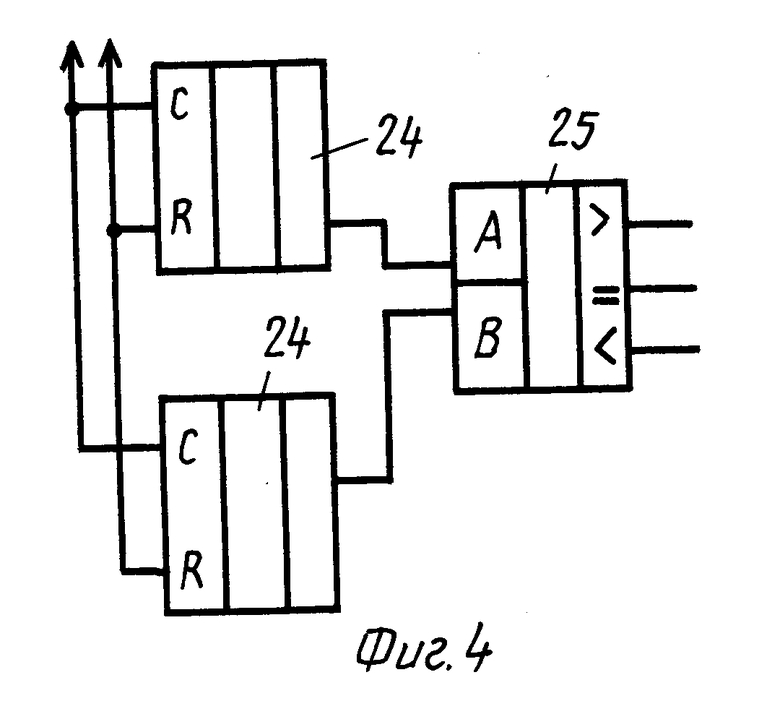
на фиг.4 схема блока дублирования каналов с блоком распознавания ситуаций.
Система для подсчета предметов состоит из передатчика 1, вход которого соединен с блоком синхронизации 2, выход которого через первый селектор адреса датчика 3 подключен к входам блока определения временных характеристик сигнала 4, выходы которого подсоединены к входам блока определения реверса и счета 5 и входам блока дублирования каналов 6, выходы которого подсоединены к четвертым входам блока распознавания аварийных ситуаций 7, третий вход которого подсоединен к выходу блока определения реверса и счета 5, вторые входы блока распознавания аварийной ситуации 7 связаны с выходами первого селектора адреса датчика 3, второй вход которого соединен с первым входом блока распознавания аварийных ситуаций 7 и с выходом приемника 8. Блок определения реверса и счета 5 соединен выходом с входом индикатора 9. Передатчик 1 через линии связи ЛС1 и ЛС2 соединен с входами датчика 10 питания и посредством линии связи ЛС1 подсоединен через блок выделения тактовой синхронизации 11 и блок выделения цикловой синхронизации 12 к первому входу второго селектора адреса датчика 13, второй вход которого соединен с выходом блока выделения тактовой синхронизации 11 и входом блока выделения цикловой синхронизации 12, первый выход которого соединен с первым входом блока формирования ответа 14, второй и третий входы которого подключены к соответствующим фотоприемникам 15, 16 чувствительного элемента датчика соответствующего канала, четвертый вход блока формирования ответа 14 соединен с первым выходом второго селектора адреса датчика 13, второй выход которого через формирователь импульсов 17 подсоединен к излучателям каналов 18, 19 чувствительного элемента датчика. Блок формирования ответа 14 соединен через третью линию связи ЛС3 с приемником 8.
Логическая подсистема обработки сигналов включает передатчик 1, блок синхронизации 2, первый селектор адреса датчика 3, блок определения временных характеристик сигнала 4, блок определения реверса и счета 5, блок дублирования каналов 6, блок распознавания аварийных ситуаций 7, приемник 8, индикатор 9.
Датчик состоит из блока питания 10, блока выделения тактовой синхронизации 1, блока выделения цикловой синхронизации 12, второго селектора адреса датчика 13, блока формирования ответа 14, формирователя импульсов 17 и чувствительного элемента датчика, включающего фотоприемники 15, 16 и излучатели 18, 19.
Блок определения временных характеристик сигнала 4 состоит из двух одинаковых каналов и содержит два реверсивных счетчика 20, каждый из которых выходами связан с входами соответствующих двух компараторов 21, два блока ввода порога 22, соединенных с вторым входом соответствующих компараторов 21, и триггер 23, соединенный с выходами компаратора и установочными входами реверсивных счетчиков 20.
Блок дублирования каналов 6 состоит из двух счетчиков 24, выходами соединенных с входами компаратора 25.
Блок формирования синхронизации 2 состоит из генератора, счетчика количества датчиков, счетчика длительности циклового импульса, триггера и элемента И, счетчика-дешифратора.
Первый селектор адреса датчика 3 состоит из четырех ключей и инверторов. Блок определения реверса и счета 5 состоит из четырех триггеров, четырех ключей, счетчика сработок и элемента ИЛИ.
Блок распознавания аварийных ситуаций 7 расположен в блоке формирования синхронизации 2, блоке контроля дублирования каналов 6, блоке определения реверса и счета 5. Конструкция чувствительного элемента датчика определяется задачей, решаемой системой.
Система работает следующим образом.
Блок синхронизации 2 вырабатывает тактовые и цикловые импульсы на частоте, достаточной для обнаружения объекта счета раз за время пребывания объекта счета в зоне датчика. С выхода блока синхронизации 2 сигнал поступает на вход передатчика 1 (где усиливается по напряжению и току) и передается в линию связи (провода ЛС1, ЛС2), а также поступает на вход первого селектора адреса датчика 3, который разрешает обработку сигнала с датчика блоку определения временных характеристик сигнала 4, блоку распознавания аварийных ситуаций 7, блоку определения реверса и счета 5, блоку дублирования каналов 6. При сработанном канале датчика (объект счета перекрыл оптический канал) реверсивный счетчик 20 блока определения временных характеристик сигнала 4 увеличивает свое состояние с частотой опроса датчика блоком синхронизации 2, компаратор 21 отслеживает состояние счетчика 20. В случае "дребезга" объекта счета оптический канал будет открываться и закрываться на малые временные интервалы, при этом реверсивный счетчик 20 будет то увеличивать, то уменьшать свое состояние, не достигнув порогового 21 значения. При длительно закрытом оптическом канале (при поступательном движении объекта счета через датчик) реверсивный счетчик 20 достигает порогового уровня, сработает компаратор 21, который перекинет триггер 23 в состояние, запрещающее работу реверсивному счетчику 20 "тени" (закрыт оптический канал) и разрешающее работу реверсивному счетчику 20 "света" (открытие оптического канала).
По истечении некоторого времени после того, как объект счета вышел из оптического канала датчика, реверсивный счетчик 20 "света" достигнет порогового значения, сработает компаратор 21 и перекинет триггер 23 в исходное состояние. Блок определения временных характеристик сигнала 4 готов к обработке следующего объекта счета. При возвращении триггера 23 в исходное состояние выдается сигнал в блок определения реверса и счета 5. Далее объект счета пересекает второй канал датчика, сигнал от которого обрабатывается в соответствующем блоке определения временных характеристик сигнала 4 и далее поступает в блок определения реверса и счета 5. При поступательном движении объекта счета на блок определения реверса и счета 5 сначала приходит сигнал от блока определения временных характеристик сигнала 4 первого канала датчика, затем от блока определения временных характеристик сигнала 4 второго канала датчика. При таком поступлении сигналов во времени блок определения реверса и счета 5 считает объекты счета на увеличение. При появлении сигнала сначала со второго канала, а затем с первого интерпретируется блоком определения реверса и счета 5 как возвратное (обратное движение) и счет объектов счета идет на уменьшение с индикацией "Возврат". Сигналы с блока определения временных характеристик сигнала 4 также поступают и на блок дублирования каналов 6, который состоит из двух счетчиков 24 на каждый канал датчика и компаратора 25. При нормальной работе датчика состояния счетчиков 24 отличаются не больше, чем на 1. При разнице большей, чем 1, формируется сигнал аварии по неработающему каналу.
Блок определения реверса и счета 5 в такой ситуации не может вести счет (ему необходимы два последовательно пришедших сигнала с блока определения временных характеристик сигнала 4), поэтому информацию о количестве объектов счета необходимо брать со счетчика 24 работающего канала блока контроля дублирования 6. При нормальной работе каналов датчика счетчики 24 сбрасываются в "0" по сигналу с блока определения реверса и счета 5 при увеличении или уменьшении количества пройденных объектов счета.
Блок распознавания аварийной ситуации 7 получает сигналы от блока определения реверса и счета 5 при возврате и от блока дублирования каналов 6 при неработающем канале, а также выделяет ситуацию, когда два канала датчика перекрыты, что невозможно в силу геометрических размеров объекта счета и расстояния между оптическими каналами датчика, ответ датчиков в цикловом импульсе. Блок питания 10 выпрямляет, фильтрует и стабилизирует синхросигнал в напряжение питания датчика. Блок выделения тактовой синхронизации 11 формирует тактовую последовательность с амплитудой, необходимой для нормальной работы блоков датчика. Тактовые импульсы синхронизации 11 формируют тактовую последовательность с амплитудой, необходимой для нормальной работы блоков датчика. Тактовые импульсы поступают на второй селектор адреса датчика 13, где по тактовому импульсу разрешается работа импульса излучения формирователю импульсов 17 и прохождение ответа в канал связи через блок формирования ответа 14 от фотоприемников 15, 16.
Блок выделения цикловой синхронизации 12 обнаруживает цикловой импульс в синхросерии и приводит в исходное состояние второй селектор адреса датчика 13, запрещает прохождение ответов через блок формирования ответов 14, после чего датчик готов к новому циклу опроса.
Изобретение относится к устройствам автоматического подсчета количества изделий, перемещаемых с произвольной скоростью, и предназначено для подсчета предметов, перемещаемых по конвейеру. Целью изобретения является повышение точности счета, обнаружения нештатных ситуаций и повышение надежности системы. Указанная цель достигается тем, что в системе, кроме подсчета предметов, предусмотрен режим распознавания аварийных ситуаций, например, блок дублирования каналов контролирует работу только одного канала для того, чтобы не занимать канал связи информацией с другого датчика, кроме того, система предусматривает диагностирование работоспособности датчиков при передаче циклового импульса. 1 з.п. ф-лы, 4 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для подсчета изделий | 1987 |
|
SU1495834A2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4081661, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
