Изобретение относится к гидроэнергетике, а именно к системам управления гидроагрегатами для выработки электроэнергии, и предназначено, прежде всего, для гидроагрегатов малых (≈ 1-30 МВт), мини (до ≈ 200 кВт) и микро (менее ≈ 50 кВт) ГЭС. Требование постоянства частоты тока при выработке электроэнергии вызывает необходимость стабилизации угловой скорости вращения гидротурбины.
Известна система стабилизации угловой скорости вращения гидротурбины [1] основанная на поддержании постоянной суммарной мощности гидроагрегата. Такая система стабилизации содержит датчик потребляемой мощности электрогенератора, узел формирования управляющего воздействия, исполнительный регулирующий орган и баластную нагрузку в качестве исполнительного органа. При этом баластная нагрузка может быть выполнена в виде вспомогательного насоса на валу гидротурбины или регулируемого жидкостного реостата. В зависимости от сигнала рассогласования изменяется либо механическая нагрузка (баластный насос), либо рассеиваемая в реостате электрическая мощность так, чтобы суммарная мощность осталась неизменной.
Система обеспечивает требуемую точность регулирования, надежна и проста в эксплуатации. Однако, учитывая широкой диапазон изменения потребляемой электрической мощности, особенно в условиях малых ГЭС с относительно небольшим количеством потребителей, установленная мощность устройств, составляющих баластную нагрузку, приблизительно равна мощности гидротурбины, что в значительной мере сводит на нет достоинства от простоты такой системы стабилизации.
Наиболее близкой к предлагаемой является электрогидравлическая система автоматической стабилизации угловой скорости вращения гидроагрегата [2] включающего гидротурбину с трактом подачи рабочей жидкости и установленный на ее валу электрогенератор. Система содержит датчик частоты вращения электрогенератора тахогенератор, обмотка которого подключена через узел сравнения к электрогидравлическому преобразователю регулятора расхода рабочей жидкости гидротурбины. Выход регулятора связан с гидродвигателем исполнительного органа, выполненным в виде сервомотора объемного действия. Сервомотор изменяет положение поворотных лопаток невращающейся периодической решетки направляющего агрегата. Контур питания гидродвигателя включает гидравлические распределительные и регулирующие элементы, высоконапорный масляный объемный насос и фильтры тонкой очистки масла, без которых невозможна надежная работа гидравлических элементов с прецизионными парами трения и высокогерметичными разделительными камерами.
Высокая стоимость элементной базы, вспомогательного оборудования, в частности золотниковых распределителей масляного (обычно винтового) насоса, фильтров тонкой очистки, сложность обслуживания, дополнительные затраты электроэнергии на функционирование системы ограничивают возможность использования данной системы стабилизации применительно к гидроагрегатам малой мощности, в которых стоимость такой системы стабилизации становится соизмерима со стоимостью гидротурбины.
Техническая задача изобретения заключается в создании автоматической системы стабилизации, с одной стороны, простой и относительно недорогой, а с другой, обеспечивающей требуемую точность поддержания угловой скорости вращения гидроагрегата (ГА).
В автоматической электрогидравлической системе стабилизации угловой скорости вращения гидроагрегата, включающего гидротурбину с трактом подачи рабочей жидкости и установленный на ее валу электрогенератор, содержащей датчик частоты вращения электрогенератора, регулятор расхода рабочей жидкости гидротурбины, вход которого связан с выходом датчика частоты вращения, а выход с гидродвигателем исполнительного органа, и контур питания гидродвигателя с высоконапорным питающим насосом, гидравлическими распределительными и регулирующими элементами, указанная техническая задача решается тем, что гидродвигатель исполнительного органа и высоконапорный питающий насос выполнены в виде динамических, например, лопастных гидромашин, гидравлические распределительные и регулирующие элементы в виде элементов проточного типа, а вход и выход контура питания подсоединены к трактам подачи и слива рабочей жидкости гидротурбины гидроагрегата.
В случае установки высоконапорного питающего насоса на валу вспомогательной турбины последняя также выполнена в виде лопастной гидромашины, проточная часть которой подсоединена к трактам отвода и подвода рабочей жидкости гидротурбины гидроагрегата.
Благодаря вышеуказанному исполнению гидромашин и гидроэлементов, имеющих заметные зазоры между вращающимися (либо перемещающимися) и неподвижными органами, допускающими небольшие внутренние и внешние протечки рабочей жидкости (воды), снижается стоимость не только за счет меньшей стоимости этих элементов как таковых, но и благодаря использованию в контуре питания гидродвигателя, распределительных и регулирующих элементов той же рабочей жидкости, что и в гидротурбине гидроагрегата. Последнее позволяет отказаться не только от систем тонкой очистки рабочей жидкости, герметизации разделительных камер, но и от дополнительных затрат электроэнергии, поскольку в предлагаемом решении в качестве источника энергии может быть использован напор воды H, "срабатываемый" на ГЭС. При этом, как показали исследования, в связи с большой инерционностью ротора гидроагрегата переход на более простое исполнение позволяет сохранить требуемую точность стабилизации угловой скорости вращения гидроагрегата и, следовательно, частоту тока при выработке электроэнергии.
На фиг. 1 представлена функциональная схема исполнительной части предложенной системы стабилизации; на фиг. 2 гидродвигатель исполнительного органа, поперечный разрез; на фиг. 3 то же, продольный разрез; на фиг. 4 - высоконапорный питающий насос с вспомогательной турбиной, продольный разрез.
Система стабилизации угловой скорости вращения выполнена следующим образом.
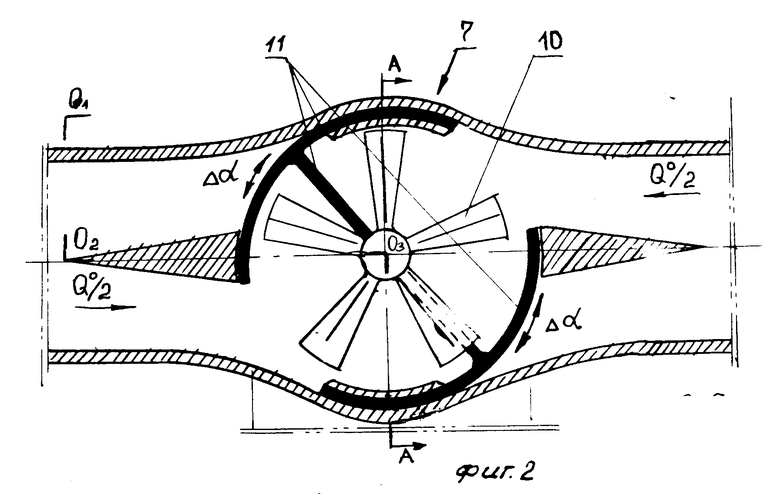
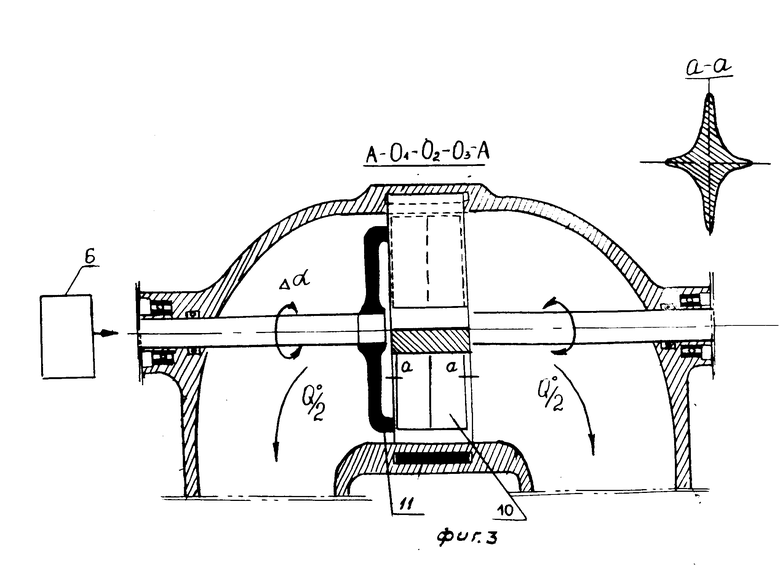
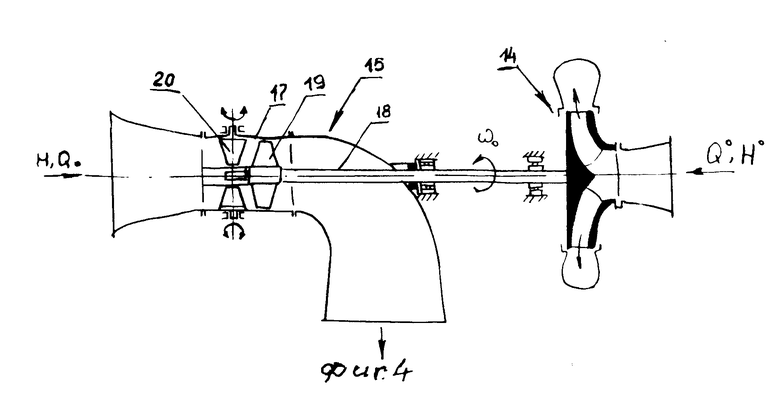
Управляемый гидроагрегат ГА (фиг. 1) представляет собой гидротурбину 1 с трубопроводом 2 подачи жидкости от верхнего бьефа ▿ ВБ и трубопроводом 3 отвода рабочей жидкости в нижний бьеф D НБ и установленный на валу гидротурбины 1 электрогенератор 4. На валу гидротурбины 1 установлен датчик частоты вращения тахогенератор 5, обмотка которого через узел рассогласования (не показан) связана с входом электромеханического регулятора 6 расхода рабочей жидкости через гидротурбину 1. К выходу регулятора 6 расхода подсоединен гидродвигатель 7 исполнительного органа 8, например затвора, дросселирующего поток в подводящем канале 9 гидротурбины 1. Гидродвигатель 7 представляет собой динамическую гидромашину, например лопастную реверсивную турбину, вариант выполнения которой с двухсторонней подачей Q0 рабочей жидкости показан на фиг. 2, 3. Перед рабочим колесом 10 гидродвигателя 7 расположены выходные регулирующие элементы 11 регулятора 6. Подводящий канал 12 гидродвигателя 7 через фильтр 13 грубой очистки подсоединен к высоконапорному питающему насосу 14, установленному на валу вспомогательной турбины 15. К высоконапорному насосу 14 подсоединен регулятор давления 16 проточного типа. Проточная часть вспомогательной турбины 15 и питающего насоса 14 связаны через фильтры 17, 18 грубой очистки с трубопроводами 2 и 3 подводящего и отводящего тракта рабочей жидкости гидротурбины 1 (вариант А на фиг. 1, точки "c" и "d"). Высоконапорный питающий насос 14 выполнен в виде динамической гидромашины, например одно- или многоступенчатого центробежного насоса, а вспомогательная турбина 15 в виде лопастной гидромашины с расходом рабочей жидкости Q0, как это показано на фиг. 4. Здесь в корпусе 17 на валу 18 закреплено лопастное рабочее колесо 19, перед которым установлен направляющий аппарат 20 с поворотными лопатками. Для бескавитационной работы гидродвигателя 7 и насоса 14 в сливной магистрали (трубопровод 3) установлены автоматически регулируемые дросселирующие устройства 21, 22 проточного типа и подпорный резервуар (D ПР) 23.
Может оказаться целесообразной установка высоконапорного питающего насоса 14 непосредственно на валу гидротурбины 1 через редуктор 24 (вариант Б на фиг. 1).
Таким образом, гидромеханическая энергия, приводящая в действие исполнительную часть системы стабилизации, создается либо за счет располагаемого напора на ГЭС, либо снимается непосредственно с вала гидроагрегата.
Использование высоконапорного динамического насоса 14 позволяет создавать давление (напор Н0) в гидравлической системе 2 6 и более МПа, что обеспечивает в процессе стабилизации угловой скорости вращения ω достижение необходимых качеств регулирования без прецизионных пар трения, фильтров тонкой очистки и т.п.
Система стабилизации работает следующим образом.
При изменении нагрузки на валу электрогенератора 4 или напора Н на ГЭС происходит отклонение угловой скорости вращения гидротурбины 1 на некоторую величину Dw. Соответственно изменяется частота вращения тахогенератора 5 и напряжение на его обмотке. Сигнал рассогласования, пропорциональный отклонению угловой скорости вращения, поступает на вход электромеханического регулятора 6 и в зависимости от величины выходного сигнала регулятора 6 вал гидродвигателя 7 поворачивается на угол Da. Поворот вала гидродвигателя 7 через кинематическую пару, например, типа винт-гайка 25 (фиг. 1) изменяет положение исполнительного органа 8, например затвора. Так, при увеличении скорости w затвор должен перемещаться вниз, уменьшая расход Q через гидротурбину 1 и повышая дросселирование напора Н. Тем самым снижается мощность, развиваемая гидротурбиной 1, и восстанавливается заданное значение скорости вращения гидроагрегата.
Для обеспечения работы насоса 14 в фиксированной точке его расходно-напорной характеристики поддерживаются определенная скорость вращения wo вспомогательной регулируемой турбины 15, а также давление p (напор Н0) и расход на выходе из насоса 14 с помощью автоматически действующего регулятора давления 16.
Меньшая жесткость расходно-напорных характеристик гидроприводных систем, функционирующих на динамических гидромашинах, в сравнении с такими приводами объемного типа, слабо влияют на качественные показатели регулирования, так как последние в определяющей степени зависят от высокой инерционности регулируемого объекта данной системы, а именно гидроагрегата ГА ГЭС.
Поэтому особенно целесообразно использование предложенного технического решения на гидростанциях малой мощности (≈ 1-30 МВт), а также на мини (≈ до 200 кВт) и микро (≈ менее 50 кВт) ГЭС.
Источники информации
1. Барков Н.К. Автоматизация мощных гидротурбин. М.-Л. Машиностроение, 1964, с. 114.
2. Справочник конструктора гидротурбин. /Под ред. Ковалева Н.Н. Л. Машиностроение, 1971, с. 189, 200, рис.2 v.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИММЕТРИЧЕСКАЯ ГИДРОЭЛЕКТРОСТАНЦИЯ | 2006 |
|
RU2338086C1 |
| ГИДРОАГРЕГАТ МАЛОЙ ГЭС | 1993 |
|
RU2061186C1 |
| ГИДРОТУРБИНА МАРЧЕНКО | 1997 |
|
RU2132965C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2009 |
|
RU2408126C1 |
| РАБОЧЕЕ КОЛЕСО ГИДРОТУРБИНЫ ДВОЙНОГО РЕГУЛИРОВАНИЯ (ВАРИАНТЫ) | 2004 |
|
RU2269026C1 |
| ГИДРОЭЛЕКТРОСТАНЦИЯ | 2002 |
|
RU2232289C1 |
| ПОГРУЖНАЯ НАСОСНАЯ УСТАНОВКА | 2011 |
|
RU2484307C1 |
| АГРЕГАТ КОНДЕНСАТНЫХ НАСОСОВ ПИТАТЕЛЬНЫХ СИСТЕМ ЭНЕРГОБЛОКОВ | 2012 |
|
RU2488717C1 |
| ГИДРОТУРБИНА С ЗАТВОРОМ | 2001 |
|
RU2193104C1 |
| ДЕРИВАЦИОННАЯ СКВАЖИННАЯ ГИДРОЭЛЕКТРОСТАНЦИЯ | 2010 |
|
RU2431015C1 |
Использование: в системах управления гидроагрегатами для выработки электроэнергии, в частности для гидроагрегатов малых, мини и микро ГЭС. Сущность изобретения: система стабилизации содержит регулятор расхода рабочей жидкости гидротурбины и контур питания гидродвигателя. К входу регулятора подключен датчик частоты вращения электрогенератора, а к выходу - гидродвигатель исполнительного органа. Контур питания гидродвигателя включает высоконапорный насос, гидравлические распределительные и регулирующие элементы. Все гидромашины системы регулирования выполнены в виде динамических гидромашин, а регулирующие и распределительные гидравлические элементы - в виде элементов проточного типа. В качестве рабочей жидкости в системе стабилизации использована та же жидкость, на которой работает гидротурбина гидроагрегата. 1 з.п. ф-лы, 4 ил.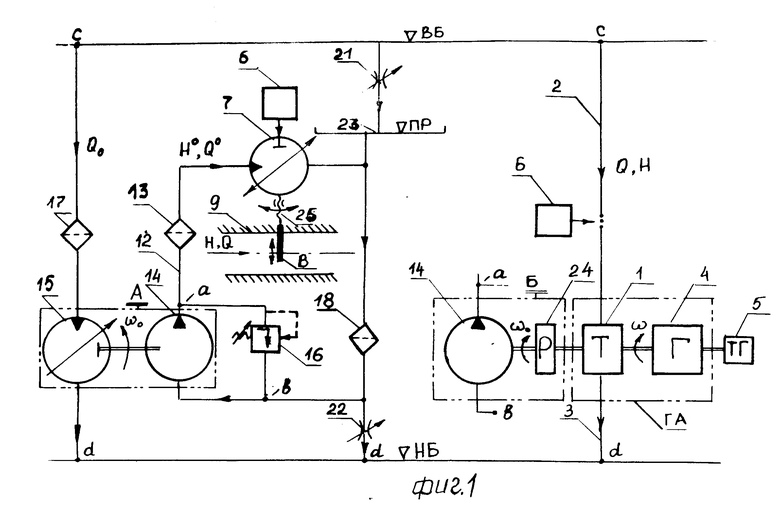
| Справочник конструктора гидротурбин/Под ред | |||
| Ковалева Н.Н.-М.: Машиностроение, 1971, с.1 98, 200, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
