Предполагаемое изобретение относится к медицинской технике и может найти применение в здравоохранении, например, при оценке психофизического состояния человека, а именно для измерения перемещения проекции центра тяжести человека на опорную плоскость.
Известно устройство для оценки функционального состояния центральной нервной системы по авторскому свидетельству СССР N 850043, кл. A 61B 5/16. Устройство содержит двухкоординатный стабилограф, вычислитель, канал обратной связи с испытуемым в виде формирователя управляющих сигналов и блока сенсорных раздражителей, соединенных последовательно, регистратор, программный блок задания ошибок рассогласования по двум координатам и блок сравнения. Вычислитель этого устройства состоит из масштабного усилителя, инвертора, выпрямителя, фильтра высоких частот, компаратора, схемы формирования порога сигнала ошибки, интегратора, генератора линейно нарастающего напряжения, трех электронных ключей, схемы запоминания максимального значения сигнала, реле времени и цифрового мультиметра.
Недостатком этого устройства является низкая точность измерения перемещений проекции центра тяжести вследствие зависимости измеряемых координат от веса испытуемого.
Известно также устройство для измерения опорных реакций (см. описание к авторскому свидетельству СССР N 1629032, кл. A 61B 5/103). Устройство содержит опорную раму, опорную плиту, винты фиксации и регулировки, генератор сигналов возбуждения, однокомпонентные пьезодатчики, блок управления, содержащий тактовый генератор, электронные ключи, триггеры, одновибраторы, коммутатор, аналоговое запоминающее устройство, аналого-цифровой преобразователь (АЦП), блок памяти, цифропечатающее устройство, вычислитель, графопостроитель, ключ разрешения измерения.
Недостатками этого устройства являются низкая точность измерения перемещения центра тяжести испытуемого вследствие зависимости результатов измерений от веса, а также невозможность измерения координат в статике и при медленных перемещениях вследствие применения пьезодатчиков, воспринимающих только динамические воздействия.
Наиболее близкой в предлагаемому устройству является силовая платформа для стабилографических исследований (Force platform for stabilographic studies /Vankov A. Dunev S. Videnov S.// Acta physiologica et pharmakologica bulgarica. Vol. 16, 3, Sofia 1990, Bulgaric Academy of Science, c.63-68).
Силовая платформа выполнена треугольной формы и подключена к автоматической системе для анализа позы с использованием персональной электронной вычислительной машины (ПЭВМ) "Правец-8М". Платформа установлена на трех опорах, выполненных в виде стальных колец и служащих тензодатчиками опорных реакций платформы. Механические напряжения, возникающие в этих кольцах и пропорциональные реакциям опор при воздействии испытуемого на платформу, преобразуются в электрические сигналы и усиливаются посредством трех идентичных измерительных каналов, включающих тензодатчик, предусилитель и фильтр нижних частот (ФНЧ) второго порядка. Сигналы с выходов этих каналов подаются на аналоговый декодер, формирующий электрические сигналы, пропорциональные вертикальной и горизонтальной координатам положения центра тяжести.
Недостатком этой силовой платформы является низкая точность измерений вследствие зависимости результатов от величины веса испытуемого.
Задача, на решение которой направлено предлагаемое изобретение, заключается в устранении зависимости результатов измерения перемещений координат проекции центра тяжести от величины веса испытуемого.
При осуществлении заявляемого изобретения вес испытуемого не влияет на результаты измерений, вследствие чего повышается точность. Так, например, предлагаемое устройство может обеспечить точность измерений в пределах 5% в диапазоне девятикратного изменения веса испытуемого (от 20 до 180 кг), в то время как известные устройства работают в аналогичных случаях с погрешностью, пропорциональной отклонению веса испытуемого от калиброванного значения, т.е. погрешность может достигать 300%
Для достижения технического результата, заключающегося в повышении точности измерений, в устройство, содержащее платформу, расположенную на опорах датчиков, усилители сигналов датчиков (УСД), декодер, ФНЧ, аналого-цифровой преобразователь (АЦП), блок управления, отображения и обработки информации (БУООИ), причем выходы датчиков соединены с входами УСД, их первые и вторые входы объединены между собой, выходы УСД соединены с входами декодера, выходы которого соединены с входами ФНЧ, выходы АЦП соединены с входом БУООИ, дополнительно введены инвертирующий и операционный усилители (ИУ и ОУ), сумматор, цифроаналоговые преобразователи (ЦАП), программируемые усилители (ПУ), источник опорного напряжения (ИОН), а датчики дополнительно содержат измерительные преобразователи (ИП), причем выход ИУ соединен с точкой, объединяющей вторые входы датчиков, а вход с точкой, объединяющей первые входы датчиков, и с выходом ОУ, вход которого соединен с выходом сумматора, второй, третий и четвертый входы которого соединены с вторым, третьим и четвертым входами декодера и с выходами УСД, первый и пятый входы декодера соединены с выходами первого и второго ЦАП соответственно, выходы ФНЧ соединены с первыми входами первого и второго ПУ, вторые входы которых соединены с третьим выходом БУООИ, а выходы с первым и вторым входами АЦП, выходы соединены с первыми входами обоих ЦАП, выходы ИОН соединены с третьим входом АЦП, вторыми входами обоих ЦАП и первым входом сумматора, ИП датчиков выполнены в виде резистивного полумоста, а БУООИ выполнен на базе контроллера и ПЭВМ.
Для доказательства наличия причино-следственной связи между совокупностью существенных признаков заявляемого изобретения и достигаемым техническим результатом рассмотрим предлагаемое технологическое решение в свете следующих теоретических предпосылок.
Пусть платформа произвольной формы установлена на трех опорах, расположенных в вершинах равностороннего треугольника АВС со стороной L. Центр координат помещен в геометрический центр этого треугольника, ось координат OX параллельна стороне АС, а ось OY перпендикулярна этой стороне.
Связь координат центра тяжести Xp и Yp с реакциями опор Ra, Rb, Rc и весом испытуемого P можно получить из уравнений моментов этих сил относительно осей координат:

Реакции опор Ra, Rb, Rc с помощью ИП преобразуются в напряжения на выходах УСД Ua, Ub, Uc, пропорциональные этим реакциям:
Ua= KSRaV, Ub KSRbV, Uc KSRcV, (6)
где S крутизна ИП,
V напряжение, приложенное к внешним выводам этих ИП, т.е. напряжение между выходами ИУ и ОУ;
K коэффициент усиления УСД.
Если коэффициент передачи ИУ равен -1, то напряжение на выходе ИУ равно по величине и противоположно по знаку напряжению на выходе ОУ Uoy, поэтому
V 2Uoy. (7)
Тогда соотношение (6) можно представить в виде
Ua 2KSRaUoy, Ub 2KSRbUoy, Uc 2KSRcUoy. (8)
Поскольку выход сумматора соединен с входом OУ, потенциал которого, как известно, близок к нулю, то напряжения Ua, Ub, Uc при одинаковых значениях коэффициента передачи сумматора по всем входам связаны с опорным напряжением Eо соотношением
Ua + Ub + Uc + E0 0, (9)
из которого с учетом соотношений (8) можно определить напряжение Uoy:
На одном выходе декодера формируется напряжение Ux, равное разности напряжений Ua и Uc:
а на другом напряжение Uy пропорциональное Ub 0,5 (Ua + Uc):
где d коэффициент пропорциональности, зависящий от параметров декодера.
Сопоставляя выражения (11) и (4), а также (12) и (5), можно получить связь напряжений Ux и Uy с координатами Xp и Yp: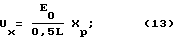
Анализ полученных выражений позволяет утверждать следующее:
напряжения Ux и Uy пропорциональны измеряемым координатам центра тяжести Xp и Xp;
эти напряжения не зависят от веса испытуемого P, т.е. величина веса не влияет на точность измерений;
дополнительно можно заметить, что результаты измерений также не зависят от значения крутизны ИП и от величины коэффициента усиления сигналов УСД, поэтому нестабильность этих параметров в процессе эксплуатации устройства (например, вследствие колебаний температуры окружающей среды, старения и других факторов) также не приводит к ухудшению точности.
Следовательно, введение признаков, отличающих заявляемое техническое решение от прототипа, в совокупности с известными позволяет решить поставленную задачу повышения точности измерения положения проекции центра тяжести, т. е. налицо наличие причинно-следственной связи между совокупностью существенных признаков заявляемого устройства и достигаемым техническим результатом.
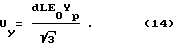
На фиг. 1 изображены платформа с датчиками и диаграмма векторов опорных реакций, на фиг. 2 структурная схема устройства, на фиг.3 изображена функциональная схема устройства, на фиг.4 функциональная схема варианта реализации контроллера.
Платформа 1 произвольной формы, например круглой, расположена на трех датчиках 2, размещенных в вершинах равностороннего треугольника ABC со стороной L (см. фиг.1).
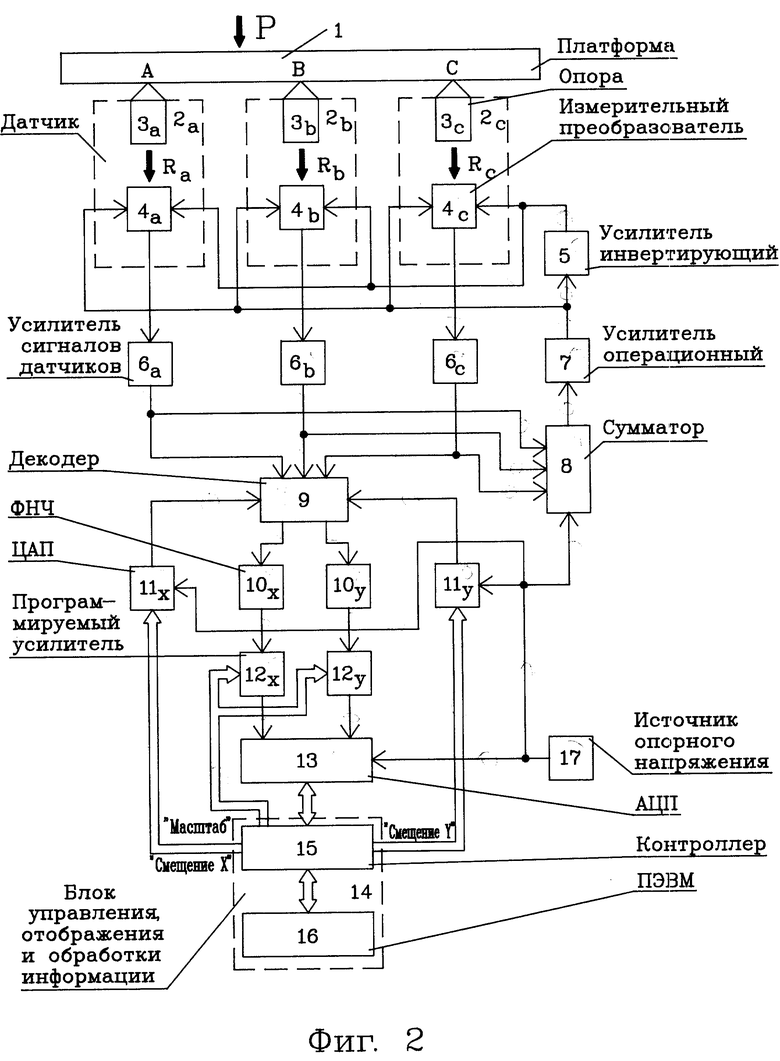
Центр координат находится в геометрическом центре треугольника ABC, ось OX параллельна стороне AC, ось OY перпендикулярна этой стороне, Xp и Yp координаты точки приложения вектора веса человека P. Реакции опор Ra, Rb, Rc преобразуются в ИП 4a, 4b и 4c (см. фиг. 2) в электрические сигналы. Первые входы ИП 4a, 4b, 4c объединены и соединены с входом ИУ 5, выход которого соединен с точкой, объединяющей вторые входы этих ИП. Выходы ИП 4a, 4b и 4c соединены с входами УСД 6a, 6b и 6c соответственно. С входом ИУ 5 соединен также выход ОУ 7, вход которого соединен с выходом сумматора 8, второй, третий и четвертый входы которого соединены с вторым, третьим и четвертым входами декодера 9 соответственно, а также с выходами УСД 6a, 6b и 6c соответственно. Выходы декодера 9 соединены с входами ФНЧ 10x и 10y, а первый и пятый входы декодера соединены с выходами ЦАП 11x и 11y. Выходы ФНЧ 10x и 10y соединены с первыми входами ПУ 12x и 12y, выходы которых соединены с первым и вторым входами АЦП 13, который соединен с БУООИ 14, шины "Смещение X" и "Смещение Y" соединены с цифровыми входами ЦАП 11xи 11y, а шина "Масштаб" соединена с цифровыми входами ПУ 12x и 12y. БУООИ 14 может состоять, например, из контроллера 15 и ПЭВМ 16. ИОН 17 соединен с опорным входом АЦП 13, опорными входами ЦАП 11x и 11y и первым входом сумматора 8. На функциональной схеме (см. фиг.3) представлен один их возможных вариантов выполнения некоторых блоков. ИП 4a, 4b и 4c в данном случае являются тензорезисторными полумостами, выполненными в виде пар последовательно соединенных тензорезисторов 18 и 19, 20 и 21, 22 и 23 соответственно. ИУ 5 выполнен на ОУ 24 и резисторном полумосте из резисторов 25 и 26. Все полумосты ИП 4a, 4b, 4c на тензорезисторах 18 и 19, 20 и 21, 22 и 23 и резисторный полумост на резисторах 25 и 26 ИУ 5 соединены параллельно и включены между выходами ИУ 5 и ОУ 7, неинвертирующие входы которых соединены с общей шиной, а инвертирующий вход ОУ 24 ИУ 5 подключен к выходу полумоста, т.е. к точке соединения резисторов 25 и 26. Выходы полумостов ИП 4a, 4b и 4c, т.е. точки соединения тензорезисторов 18 и 19, 20 и 21, 22 и 23 соответственно, подключены к неинвертирующим входам ОУ 27, 28 и 29 УСД 6a, 6b и 6c соответственно. К инвертирующим входам ОУ 27, 28 и 29 подключены общие точки полумостов на резисторах 30 и 31, 32 и 33, 34 и 35 соответственно. Выходы операционных усилителей 27, 28 и 29 являются выходами УСД 6a, 6b, 6c и соединены с другими выводами резисторов 31, 33 и 35 соответственно. Другие выводы резисторов 30, 32 и 34 соединены с общей шиной. Выходы УСД 6a, 6b и 6c соединены с входами сумматора 8, т.е. выходы ОУ 27, 28 и 289 соединены с выводами резисторов 36, 37 и 38 соответственно, другие выводы которых объединены и соединены с инвертирующим входом ОУ 7 и резистором 39, другой вывод которого соединен с ИОН 17. Выход ОУ 27 соединен с точкой, объединяющей выводы резисторов 40 и 41 и являющейся вторым входом декодера 9. Выход ОУ 28 соединен с третьим входом декодера, который является неинвертирующим входом ОУ 42, выход которого является вторым выходом декодера 9 и соединен с входом ФНЧ 10y. Выход ОУ 29 соединен с четвертым входом декодера, т.е. с точкой, объединяющей выводы резисторов 43 и 44, другой вывод которого соединен с резистором 45, другой вывод которого является пятым входом декодера 9 и соединен с выходом ЦАП 11y. Другой вывод резистора 40 соединен с резистором 46, вывод которого является первым входом декодера 9 и соединен с выходом ЦАП 11x. Неинвертирующий вход операционного усилителя 47 соединен с точкой соединения резисторов 40, 46 и 48, второй вывод которого соединен с общей шиной. Инвертирующий вход ОУ 47 соединен с точкой соединения резисторов 43 и 49, второй вывод которого соединен с выходом ОУ 47, являющийся первым выходом декодера 9 и соединенным с входом ФНЧ 10x. Другие выводы резисторов 41 и 44 объединены и подсоединены к инвертирующему входу ОУ 42 и к точке соединения резисторов 45 и 50. Другой вывод резистора 50 соединен с выходом ОУ 42 и соответственно с входом ФНЧ 10y. Соединения блоков 10x, 10y, 11x, 11y, 12x, 12y 13, 14, 15, 16 и 17 те же, что и на фиг.2 и описаны выше.
Изображенный на фиг.4 контроллер 15 состоит из микроЭВМ 51, соединенной посредством шины адреса и данных (ШАД) с регистром 52 масштаба, регистром 53 смещения X, регистром 54 смещения Y, регистром 55 адреса, постоянным запоминающим устройством (ПЗУ) 56. Регистр 55 соединен другим входом с микроЭВМ 51 через ее первый управляющий выход. Дешифратор (ДШ) 57 адреса соединен шиной с регистром 55 адреса, входом с вторым управляющим выходом микроЭВМ 51, первым выходом с входом регистра 52 масштаба, вторым выходом - с входом регистра 54 смещения Y и регистра 53 смещения X. Третий управляющий выход микроЭВМ 51 соединен с входом ПЗУ 56, которое посредством шины соединено с портом P2 микроЭВМ 51, а также с ШАД. Третий управляющий выход микроЭВМ 51 соединен с входом интерфейса 58, который также соединен шиной с ШАД, которая соединена с портом PB микроЭВМ 51. Выход регистра 52 посредством шины "Масштаб" соединен с ПУ 12x и 12y. Регистр 53 смещения X посредством шины "Смещение X" подсоединен к ЦАП 11x, а регистр 54 смещения Y посредством шины "Смещение Y" подсоединен к ЦАП 11y. Интерфейс 58 подсоединен к ПЭВМ 16. ШАД подсоединена к АЦП 13. ФНЧ 10xи 10y (см. фиг.2 и фиг.3) идентичны в своем выполнении и могут быть реализованы, например, по схеме, опубликованной в статье Force Platform for Stabilographic Studies /Vankov A. Dunev S. Videnov S. // Acta physiologica et pharmacologica Bulgarica. Vol. 16,3, Sofia 1990, Bulgarian Academy of Sciences, c.63-68, или по схеме на стр. 171 в Справочнике по расчету и проектированию ARC-схем. Под редакцией А.А.Ланнэ, М. Радио и связь, 1984.
ЦАП 11x и 11y также идентичны в своем исполнении и могут быть реализованы с помощью общедоступных средств (см. например, Федоров Б.Г. Телец В.А. Микросхемы ЦАП и АЦП: функционирование, параметры, применение. М. Энергоатомиздат, 1990, рис.2.3, 2.4 на стр. 54 и 56).
В качестве АЦП 13 может быть использован, к примеру, двухканальный АЦП серии КМ1126ПВ1 (см. Федоров Б.Г. Телец В.А. Микросхемы ЦАП и АЦП: функционирование, параметры, применение. М. Энергоиздат, 1990, стр. 191, рис.3.44) или АЦП серии К572ПВ4 (см. там же стр.263, рис.5.1).
ПУ 12x и 12y (см. фиг.2 и фиг.3) идентичны по своему выполнению и могут быть реализованы с помощью общедоступных средств (см. например, Гутников В. С. Интегральная электроника в измерительных устройствах, Л. Энергоатомиздат, 1988, 2-е издание, с.234, рис.9.4 б. БУООИ 14 может быть реализован, например, на ПЭВМ IBM PC/AT 16 и контроллере 15. В качестве ИОН 17 может быть использовано, например, стабилизированное постоянное напряжение питания устройства.
Контроллер 15 может быть выполнен на основе однокристальной микроЭВМ типа К1816ВЕ35. Программа реализации требуемых функций контроллера 15 занесена в ПЗУ 56 на микросхемах типа К573РФ5. Регистры 55, 52, 53, 54 (адреса, масштаба, смещения по координатам X и Y), реализованные на микросхемах КР1533ИР22 и КР1533ИР23, служат для приема из шины адреса и данных (ШАД) и запоминания соответствующих кодов.
ДШ адреса 57 реализован на микросхемах КР1533ЛЕ1 и КР1533ЛЛ1, он обеспечивает подключение необходимого регистра к ШАД.
Обмен информацией с ПЭВМ 16 (типа IBM PC/AT) реализован при помощи микросхемы программируемого последовательного интерфейса 58 -К580ВВ1.
Работает устройство следующим образом.
Испытуемого помещают на платформу 1. Под действием его веса (см. вектор P на фиг.1) в опорах 3 датчиков 2 (см. фиг.2) возникают реакции опор Ra, Rb и Rc, воспринимаемые ИП 4. Сумма этих реакций равна весу, а соотношение между ними зависит от координат центра тяжести тела Xp и Yp. При отклонении тела от заданного положения разбаланс тензорезисторных полумостов 4 на тензорезисторах 18 и 19, 20 и 21, 22 и 23 (см. фиг.3) под действием сил Ra, Rb и Rc приводит к появлению напряжения на выходе этих полумостов и на выходе УСД 6a, 6b и 6c, т.е. на выходах ОУ 27, 28 и 29, величина которого зависит от приложенной силы и от напряжения, приложенного к выводам полумостов 4. Напряжение, приложенное к тензорезисторам 18, 20 и 22 полумостов 4, равно по величине и противоположно по знаку напряжению, приложенному к резисторам 19, 21 и 23 этих полумостов. Это достигается при помощи ОУ 24, охваченного обратной связью через полумост на одинаковых резисторах 25 и 26. Напряжение на выводах тензорезисторов 18, 20 и 22 полумостов 4 формируется ОУ 7, на входе которого при помощи сумматора 8 складываются напряжения с выходов УСД 6a, 6b и 6c и опорное напряжение E0 ИОН 17.
В результате действия обратной связи через ОУ 7 сумма напряжений на выходах УСД 6a, 6b и 6c оказывается равной по величине и противоположной по знаку опорному напряжению ИОН 17 независимо от величины реакций опор Ra, Rb и Rc.
Горизонтальная координата проекции центра тяжести Xp формируется на первом выходе декодера 9 как разность между напряжениями на выходах УСД 6a и 6c, а вертикальная координата Yp на втором выходе декодера 9 как разность между напряжением на выходе УСД 6b и полусуммой напряжений на выходах УСД 6a и 6c.
Сигналы с выходов декодера 9 пропускаются через ФНЧ 10x и 10y с целью ограничения спектра, необходимого для обеспечения корректной дискретизации аналого-цифровым преобразователем. Программируемые усилители 12x и 12y обеспечивают возможность усиления этих сигналов с целью масштабирования, т.е. повышения чувствительности измерений. Значение коэффициента усиления ПУ 12x, 12y определяется кодом "Масштаб", формируемым контроллером 15 по команде оператора ПЭВМ 16.
Напряжения, пропорциональные текущим значениям координат центра тяжести, снимаются с выходов ПУ 12x и 12y и через АЦП 13 подаются в ПЭВМ 16, где отображаются, например, в виде светящейся точки на экране дисплея. Динамика изменения этих значений во времени в ходе стабилометрических исследований заносится в память ПЭВМ 16 в виде стабилографических кривых, подвергаемых последующей обработке с целью выявления необходимых информативных показателей, зависящих от психофизиологического состояния испытуемого.
ЦАП 11x и 11y реализуют возможность "центровки", т.е. совмещения первоначального положения центра тяжести испытуемого с центром координат. Для этого по команде оператора в ПЭВМ 16 фиксируется значение напряжений смещения на выходах ПУ 12x и 12y и формируются коды "Смещение X" и "Смещение Y". Код "Смещение X" формирует такое напряжение на выходе ЦАП 11x, которое после прохождения через декодер 9, ФНЧ 10x и ПУ 12x компенсирует напряжение смещения на выходе последнего. Аналогичным образом код "Смещение Y" формирует напряжение на выходе ЦАП 11y, обеспечивающее компенсацию напряжения смещения на выходе ПУ 12y.
Контроллер 15 выполняет следующие функции:
формирование управляющих кодов для ЦАП 11x и 11y, обеспечивающих центровку, т.е. совмещение центра координат с начальным положением центра тяжести испытуемого;
формирование кодов для ПУ 12x и 12y, обеспечивающих управление масштабом по осям координат;
реализацию протокола обмена с ПЭВМ 16 в стандарте RS 232C.
Для выбора требуемого масштаба оператор набирает на клавиатуре ПЭВМ 16 значение масштабного коэффициента, код которого через интерфейс 58 поступает в контроллер 15 и далее через регистр 52 масштаба на программируемые усилители 12x и 12y. Центровка осуществляется по команде оператора либо самого испытуемого, при этом ПЭВМ 16 формирует сигнал "центровка", который через интерфейс 58 поступает в контроллер 15 и инициализирует выполнение в микроЭВМ 51 микропрограммы центровки, записанной в ПЗУ 56. Сформированные в ПЭВМ 16 коды смещения X и смещения Y по ШАД передаются через соответствующие регистры 53 и 54 в ЦАП 11x и 11y.
При проведении стабилографических исследований испытуемый становится на платформу 1 в рекомендуемой позе. Под действием его веса в опорах, на которых установлена платформа 1, возникают механические деформации, которые воспринимаются датчиками 2 и преобразуются в электрические сигналы, которые усиливаются и преобразуются в напряжения, пропорциональные горизонтальной и вертикальной координатам проекции центра тяжести на плоскость платформы; эти напряжения кодируются в АЦП 13 и вводятся в ПЭВМ 16. На экране дисплея ПЭВМ 16 положение проекции центра тяжести отображается в виде светящейся точки на координатной плоскости.
По команде оператора ПЭВМ 16 либо самого испытуемого (реализуемого нажатием определенной клавиши на клавиатуре ПЭВМ 16) осуществляется центровка, т.е. совмещение фактического положения проекции центра тяжести испытуемого с центром координат. Нажатием соответствующей клавиши на клавиатуре ПЭВМ 16 выбирается масштаб изображения на экране дисплея, например при выборе масштаба 10: 1 перемещению проекции центра тяжести по платформе 1 на 1 мм будет соответствовать перемещение на 10 мм светящейся точки на экране дисплея ПЭВМ 16.
В соответствии с выбранной методикой исследований испытуемому дается определенное задание, например попытаться удерживать светящуюся точку в центре координат, управляя положением центра тяжести. В зависимости от психофизиологического состояния испытуемого точность выполнения этого задания может существенно отличаться. Траектория перемещения центра тяжести в ходе выполнения задания заносится в память ПЭВМ 16 и подвергается статистической обработке. Полученные статистические характеристики дают оценку психофизиологического состояния испытуемого.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛОГРАФ | 1994 |
|
RU2095025C1 |
| СПОСОБ ОЦЕНКИ ОБЩЕГО ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЧЕЛОВЕКА | 1999 |
|
RU2165733C2 |
| СИЛОМЕТРИЧЕСКАЯ ПЛАТФОРМА | 1999 |
|
RU2185094C2 |
| N-канальный фильтр | 1982 |
|
SU1053277A1 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ ЛИНИЙ СВЯЗИ ПО МОДЕЛИ СИГНАЛА И ПЕРЕПРОГРАММИРУЕМЫМ ЭЛЕКТРИЧЕСКИМ СХЕМАМ | 2005 |
|
RU2317641C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МАГНИТОМЯГКИХ МАТЕРИАЛОВ | 2009 |
|
RU2390789C1 |
| Радиостанция, обеспечивающая противодействие системам извлечения информации | 2021 |
|
RU2758499C1 |
| Управляемый RC-генератор | 1988 |
|
SU1663742A1 |
| Активный SC-фильтр нижних частот | 1990 |
|
SU1764143A1 |
| УСТРОЙСТВО ДЛЯ ПРЯМОГО ПОИСКА ГЕОЛОГИЧЕСКИХ ОБЪЕКТОВ | 2011 |
|
RU2454683C1 |

Изобретение относится к медицинской технике и может найти применение в здравоохранении, например, при оценке психофизического состояния человека, а именно для измерения положения проекции центра тяжести человека на опорную плоскость. Сущность: устройство содержит платформу, датчики, включающие в себя опоры, на которых расположена платформа, и измерительные преобразователи (ИП), входы и выходы которых являются входами и выходами датчиков, усилители сигналов датчиков (УСД), декодер, фильтры нижних частот (ФНЧ), аналого-цифровой преобразователь (АЦП), блок управления, отображения и обработки информации (БУООИ), инвертирующий и операционный усилители (ИУ и ОУ), сумматор цифроаналоговые преобразователи (ЦАП), программируемые усилители (ПУ), источник опорного напряжения (ИОН), причем выходы ИП соединены с входами УСД, первые входы ИП объединены между собой, вторые входы ИП также объединены, выходы УСД соединены с входами декодера, выходы которого соединены с входами ФНЧ, АЦП соединен с БУООИ, вход ИУ соединен с первыми входами ИП, а выход соединен с вторыми входами ИП, вход ИУ соединен также с выходом ОУ, вход которого соединен с выходом сумматора, второй, третий и четвертый входы которого соединены с вторым, третьим и четвертым входами декодера и соответствующими выходами УСД, первый и пятый входы декодера соединены с выходами первого и второго ЦАП, выходы ФНЧ соединены с входами первого и второго ПУ, цифровые входы которых соединены с шиной "Масштаб" БУООИ, а выходы - с первым и вторым входами АЦП, цифровые входы первого и второго ЦАП соединены с шинами "Смещение X" и "Смещение Y" БУООИ, выход ИОН соединен с опорным входом АЦП, опорными входами ЦАП и с первым входом сумматора, ИП выполнен в виде тензорезисторного полумоста, а БУООИ - на базе ПЭВМ. 1 з.п. ф-лы, 4 ил.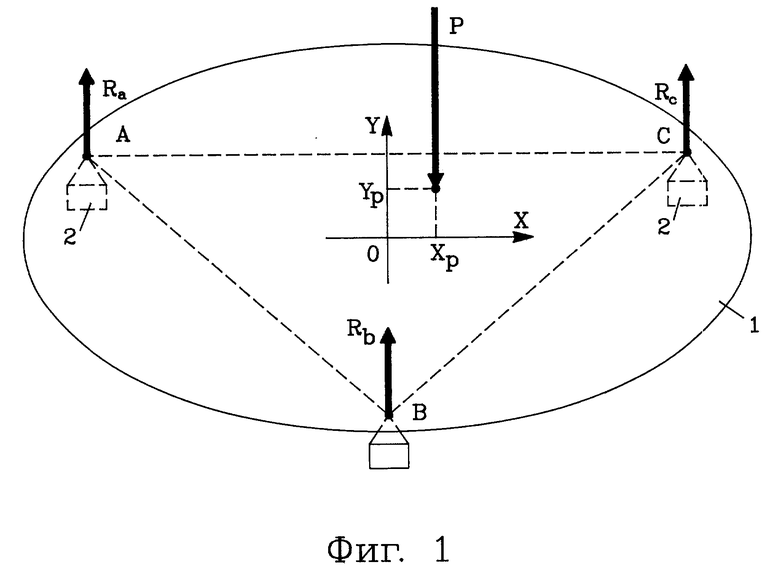
| Force platform for stabilographic studies | |||
| Vankov A., Dunev S., Videnov S | |||
| Actaphysio logica et pharmaco logica bulgaria, Vol | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
