Изобретение относится к медицинской и силоизмерительной технике, в частности к устройствам для измерения опорных реакций и координат центра сил давления при стоянии человека на платформе, и может использоваться для биомеханических исследований, в том числе исследований функции равновесия человека.
Известно устройство для измерения опорных реакций, содержащее опорную раму, опорную плиту, винты фиксации и регулировки, генератор сигналов возбуждения, однокомпонентные пьезодатчики и блок управления. Опорная рама выполнена в виде цилиндрического кольца и снабжена датчиками горизонтальных составляющих, закрепленными с торца опорной рамы с помощью направляющих и винтов фиксации (см. описание к авторскому свидетельству СССР 1629032, МПК 5 А 61 В 5/103, опубл. 1991 г.).
Недостаток такого устройства - конструктивная сложность, сравнительно низкая эксплуатационная надежность и сравнительно невысокая точность измерения изменений координат центра сил давления из-за отсутствия жесткой фиксации опорной плиты.
Авторским свидетельством СССР 1600703, МПК 5 А 61 В 5/103, 5/22, опубл. 1990 г. , защищена динамометрическая платформа, содержащая основание, на котором свободно при помощи опор трения качения установлена опорная плита, опоры трения качения выполнены в виде двух цилиндрических сегментов, между которыми установлено кольцо с тензорезисторами, между основанием и опорной плитой установлены чувствительные элементы, выполненные в виде колец с тензорезисторами. Кольца с тензорезисторами установлены при помощи пазов, выполненных по ширине кольца в цилиндрических сегментах, а цилиндрические сегменты - при помощи пазов, выполненных под ширину сегмента в основании и опорной плите. В цилиндрических сегментах, в кольцах с тензорезисторами и в основании соосно выполнены углубления, в которых установлены шарики. Такая динамометрическая платформа имеет сравнительно высокую точность при измерении сил и моментов. Однако из-за выполнения чувствительных элементов в виде колец, величина периметра которых сопоставима с геометрическими размерами опорной плиты и, из-за отсутствия жесткой фиксации опорной плиты точность измерения координат центра сил давления понижена.
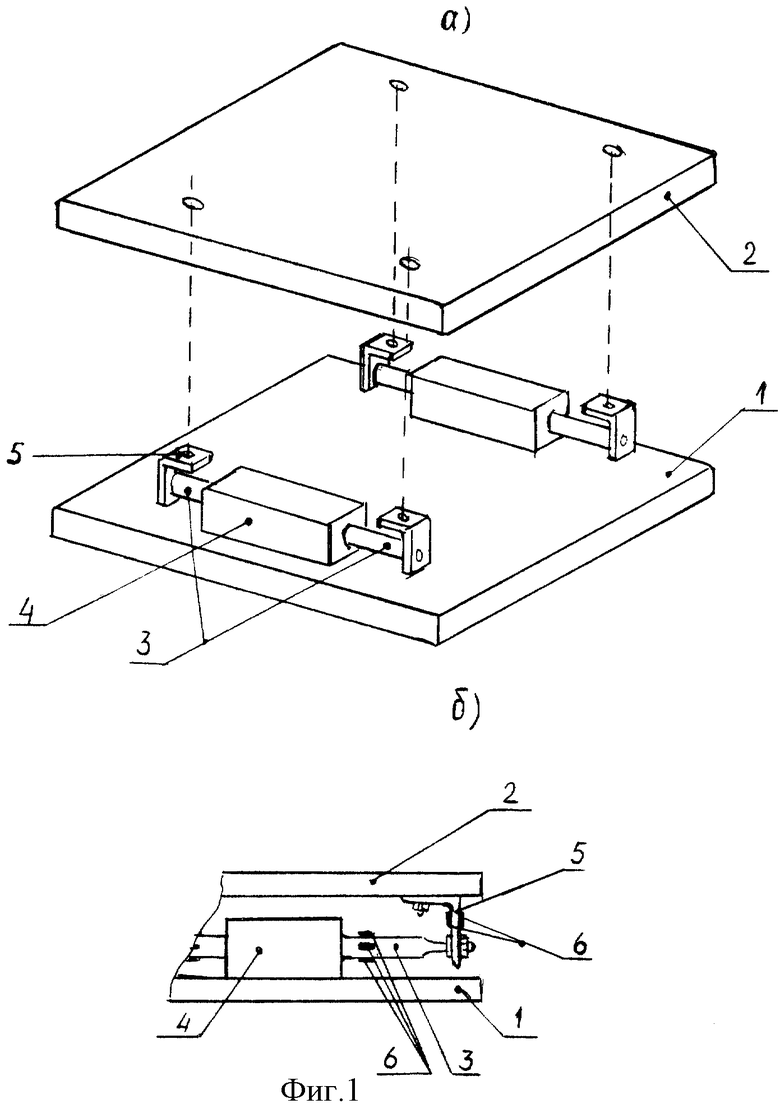
Наиболее близким по технической сущности к заявляемому техническому решению, по мнению авторов, является динамометрическая платформа для биомеханических исследований, описанная в препринте Института проблем передачи информации АН СССР "Силовые моментные датчики для робототехнических систем", авторы А. Ю. Шнейдер и др., Москва, 1986 г., стр. 14, рис. 1.7. Эта платформа (фиг.1) состоит из нижнего основания 1 и опорной плиты 2, опирающейся на четыре датчика - опоры. Упругий элемент каждого датчика включает стержень 3, один конец которого жестко закреплен в бобышке 4, а другой с опорным уголком 5, скрепленным с верхней плитой. Тензорезисторы 6 наклеены на каждый стержень и вертикальную поверхность каждого опорного уголка. Недостаток такой платформы обусловлен ее конструктивными особенностями. Для обеспечения необходимого частотного диапазона измерений верхняя плита должна обладать достаточной жесткостью, что сказывается на точностных характеристиках и массогабаритных параметрах платформы. Повышенная инерционность верхней плиты существенно снижает чувствительность и точность при динамическом измерении координат центра сил давления.
Технический результат от использования изобретения - повышение точности при динамическом измерении координат центра сил давления, оптимизация массогабаритных параметров платформы при упрощении конструкции.
Указанный технический результат достигается тем, что в силометрической платформе, содержащей силовоспринимающую плиту, опоры и датчики опорных реакций, датчики опорных реакций представляют собой изгибные датчики параллелограммного типа, выполненные в консолях периферийных ребер жесткости силовоспринимающей плиты, свободными концами опирающихся на опоры через сферические шайбы.
Периферийные ребра жесткости силовоспринимающей плиты выполнены съемными и соединены с силовоспринимающей плитой жестким соединением, например винтовым, с длиной контакта в центральной части большей, чем высота ребра жесткости.
Изобретение поясняется чертежами.
На фиг.1 показана конструкция силометрической плиты, выбранной в качестве прототипа.
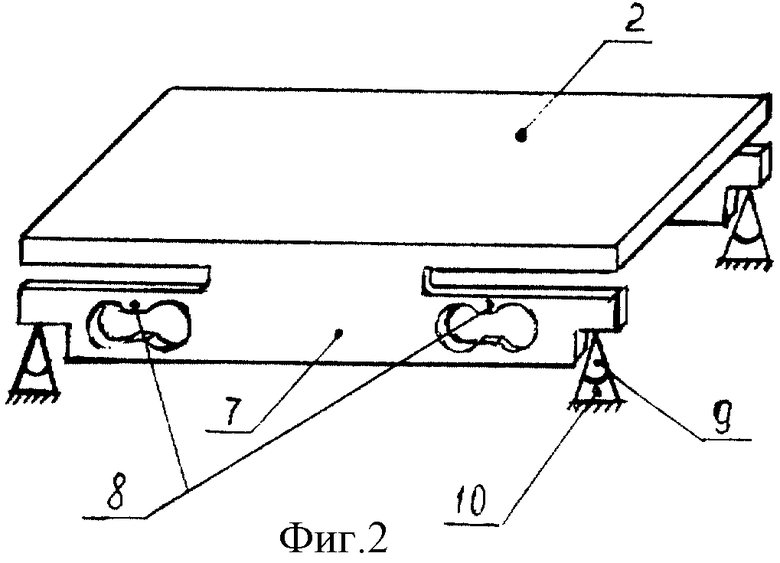
На фиг. 2 схематично изображена конструкция заявленной силометрической платформы.
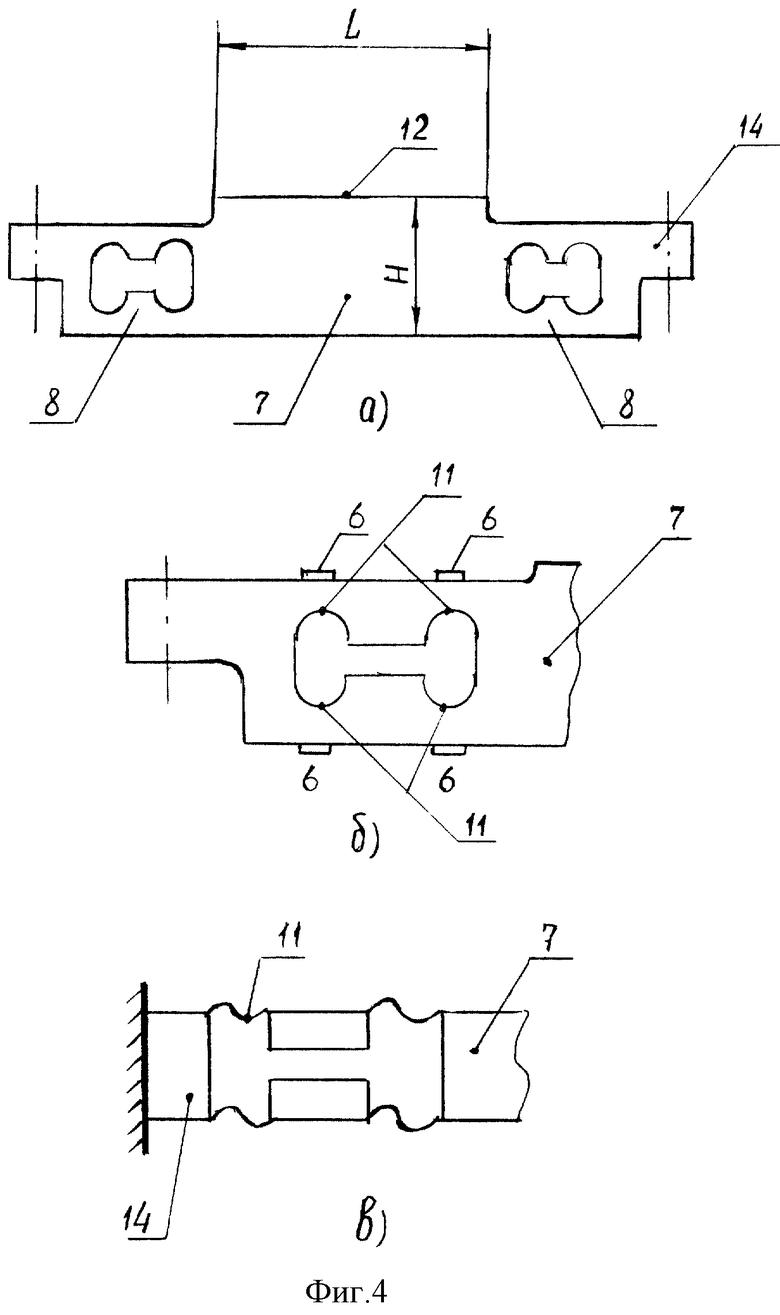
На фиг. 3 показана конструкция заявленной силометрической платформы со съемными периферийными ребрами жесткости силовоспринимающей плиты.
На фиг.4 изображена конструкция изгибного датчика опорных реакций и его приведенная схема.
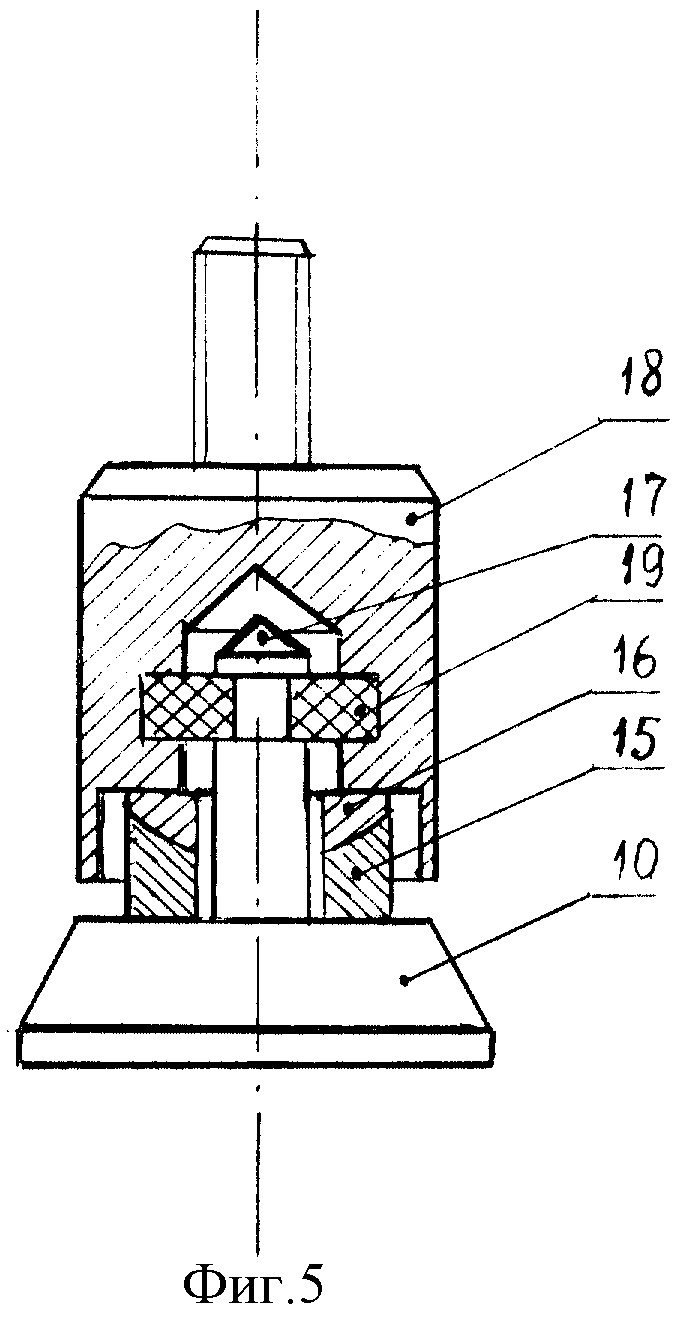
На фиг.5 показана конструкция опоры со сферическими шайбами.
Силометрическая платформа, принятая в качестве прототипа (фиг.1), содержит основание 1, силовоспринимающую плиту 2, датчики опорных реакций в виде стержней 3, конструктивно выполненных как единое целое с бобышками 4, жестко крепленными с основанием 1. Силовоспринимающая плита 2 соединена со стержнями 3 через опорные уголки 5. Тензорезисторы 6 наклеены на каждый стержень 3 и вертикальную поверхность каждого опорного уголка 5.
Заявленная силометрическая платформа (фиг.2) содержит силовоспринимающую платформу 2 с периферийными ребрами жесткости 7, в консолях которых конструктивно едино выполнены изгибные датчики 8 опорных реакций. Концы ребер жесткости 7 через сферические шайбы 9 опираются на опоры 10. Место расположения изгибных датчиков 8 в ребре жесткости 7 некритично, достаточно того, чтобы изгибной датчик 8 находился между областью контакта ребра жесткости 7 с силовоспринимающей плитой 2 и точкой контакта с опорой 10.
Тензорезисторы 6 наклеены на концентраторах 11 напряжений изгибных датчиков 8 (фиг.4). Съемные периферийные ребра жесткости 7 (фиг.3) центральной частью 12, ширина которой L превышает высоту Н ребра жесткости 7, контактируют с силовоспринимающей плитой 2 и крепятся с ней, например, с помощью винтов 13. Концы 14 ребер жесткости 7 (фиг.5) опираются на опоры 10 через нижнюю 15 и верхнюю 16 сферические шайбы. Опора 10 содержит стержень 17, который фиксируется в силовом стержне 18 с помощью эластичной шайбы 19. Силовой стержень 18 скрепляется с концом 14 ребра жесткости 7 резьбовым соединением или жесткой насадкой. Одна из опор 10 имеет регулировочный элемент, изменяющий ее высоту.
Заявленная силометрическая платформа работает следующим образом. Платформу устанавливают на ровную горизонтальную площадку и регулировкой высоты опоры 10 с регулировочным элементом добиваются устойчивого положения платформы на площадке. При силовом воздействии на силовоспринимающую плиту 2, например установке человека, с датчиков 8 снимаются электрические сигналы, значения которых связаны функциональной зависимостью с величинами, соответствующими силам давления на опоры 10. Измерив значения электрических сигналов с каждого из датчиков 8, можно определить с высокой точностью координаты центра сил давления на силовоспринимающую плиту 2 относительно опор 10.
Заявленная силометрическая платформа в сравнении с аналогами и прототипом обеспечивает с высокой точностью измерение изменений координат центра сил давления при стоянии человека на силовоспринимающей плите. Повышение точности достигается за счет того, что:
1) датчики опорных реакций выполнены единым конструктивным элементом в периферийных ребрах жесткости силовоспринимающей плиты (исключены погрешности, вносимые элементами присоединения датчиков к силовоспринимающей плите);
2) в качестве датчиков опорных реакций использованы изгибные датчики параллелограммного типа, отличающиеся высокой чувствительностью к вертикальным составляющим приложенного к силовоспринимающей платформе силового воздействия и не чувствительные к боковым силам и крутящим моментам (исключено влияние этих составляющих на результаты измерения координат центра сил давления);
3) использованы в качестве контактирующих элементов с опорами сферические шайбы, обеспечивающие минимизацию геометрических размеров и стабильную фиксацию зоны контакта с опорой (уменьшены погрешности за счет неопределенности точки приложения опорных реакций).
Снижение весовых характеристик в сравнении с прототипом достигается за счет того, что:
- в результате использования выполненных в консолях периферийных ребер жесткости силовоспринимающей платформы изгибных датчиков параллелограммного типа отпала необходимость в повышенных требованиях к жесткости силовоспринимающей плиты;
- в результате использования в качестве контактирующих элементов с опорами сферических шайб отпала необходимость в нижнем основании, обеспечивающем жесткость опор.
Заявленная силовоспринимающая платформа отличается технологичностью и простотой конструкции. Силовоспринимающая плита 2 представляет литую конструкцию из легкого металла, например силумина, и не требует специальной обработки. Снимаемые ребра жесткости 7 выполнены из брусков с соотношением высоты к ширине в пределах 5:1 из сплава Д16Т и изготовляются фрезерованием. Платформа не содержит подстроечных элементов и не нуждается в регулировке при эксплуатации. Изготовленные опытные образцы заявленной силовоспринимающей платформы с габаритами 500х500 мм2 и массой исследуемых объектов до 150 кг имеют вес 5-7 кг и обеспечивают измерение изменений координат центра сил давления с точностью не хуже 1%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛОГРАФ | 1992 |
|
RU2093074C1 |
| СТАБИЛОГРАФ | 1994 |
|
RU2095025C1 |
| СПОСОБ ВЫБОРА МЕДИКАМЕНТОЗНЫХ СРЕДСТВ ПРИ ЛЕЧЕНИИ БОЛЬНЫХ С ВЕСТИБУЛЯРНЫМИ НАРУШЕНИЯМИ | 1999 |
|
RU2200459C2 |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1995 |
|
RU2111464C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ЛЕЧЕБНОГО ЭФФЕКТА ОТ МЕДИКАМЕНТОЗНЫХ СРЕДСТВ ПРИ ЛЕЧЕНИИ БОЛЬНЫХ С НАРУШЕНИЯМИ МОЗГОВОГО КРОВООБРАЩЕНИЯ | 1999 |
|
RU2202939C2 |
| Устройство платформенного типа для многокомпонентного измерения сил и моментов | 1990 |
|
SU1783329A1 |
| Бесфундаментные переносные весы | 1989 |
|
SU1719918A1 |
| Тензоплатформа для измерений усилий отталкивания при спортивных исследованиях | 1990 |
|
SU1733026A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТНОМ БАССЕЙНЕ | 1997 |
|
RU2113373C1 |
Изобретение относится к медицинской и силоизмерительной технике, в частности к устройствам для измерения опорных реакций и координат центра сил давления при стоянии человека на платформе, и может использоваться для биомеханических исследований функции равновесия человека. Силометрическая платформа содержит силовоспринимающую плиту, опоры и датчики опорных реакций, при этом датчики опорных реакций представляют собой изгибные датчики параллелограммного типа, выполненные в консолях периферийных ребер жесткости силовоспринимающей плиты, концами опирающихся на опоры через сферические шайбы. Периферийные ребра жестко выполнены съемными и соединены с силовоспринимающей плитой жестким соединением с длиной контакта в центральной части большей, чем высота ребра жесткости. Это позволяет повысить точность при динамическом измерении координат центра сил давления, снизить весовые характеристики платформы при упрощении конструкции. 1 з.п. ф-лы, 5 ил.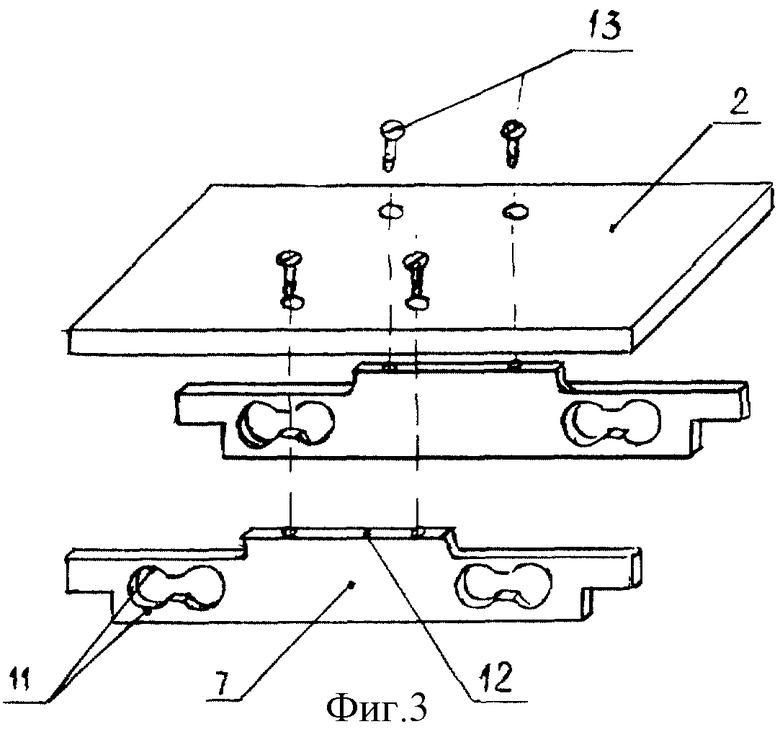
| Динамометрическая платформа | 1988 |
|
SU1600703A1 |
| СТАБИЛОГРАФ | 1994 |
|
RU2095025C1 |
| РОЩИН Г.И | |||
| Метод и прибор для определения силового воздействия всего тела и каждой конечности на опору | |||
| В кн.: Третья научная сессия ЦНИИПП | |||
| - М.: Министерство обеспечения РСФСР, 1953, с.134-142 | |||
| ШНЕЙДЕР А.Ю | |||
| и др | |||
| Силовые моментные датчики для робототехнических систем | |||
| - М.: препринт Института проблем передачи информации АН СССР, 1986, с.14. | |||

