Изобретение относится к классу преобразователей "вал-код" (ПВК) и предназначено для использования в системах управления положением электромеханических объектов, в частности в следующих электроприводах с вентильными двигателями.
Аналогом предлагаемого устройства по функциональной схеме является следящий преобразователь угла поворота вала в код амплитудного типа с внешней по отношению к датчику положения ротора (ДПР) петлей обратной связи и компенсацией погрешности неортогональности обмоток синусно-косинусного вращающегося трансформатора (СКВТ) (авт. св. N 1417190 от 9.10.86, H 03 M 1/48).
Электронная цифроаналоговая следящая система ПВК в статике поддерживает равенство нулю напряжения U на выходе блока сравнения, формула для расчета которого имеет вид:
U = A[sinα•sin(α*+Φ*)-sin(α+Φ)•sinα*],
где A амплитуда опорного сигнала датчика;
α угол поворота ротора датчика;
v сдвиг фаз огибающих выходных сигналов датчика;
α* измеренное значение угла поворота ротора датчика;
Φ* сдвиг фаз сигналов, сформированных в синусных функциональных преобразователях.
Задание сдвига фаз Φ* осуществляется в цифровом виде. При настройке ПВК с конкретным датчиком на регистре набирается значение Φ* с учетом погрешности изготовления датчика, например, для СКВТ неортогональности обмоток sin и cos. При равенстве Φ*= Φ напряжение U представляется в виде:
U = A•sinΦ•sin(α-α*)
или для СКВТ
U = A•sin(α-α*),
что при замыкании следящей системы через интегратор, состоящий из преобразователя напряжения частота (ПНЧ) и реверсивного счетчика (РС) приводит к выполнению условий
U _→ 0, т.е. α* _→ α.
Известный ПВК вырабатывает оценки в цифровом виде: линейной функции угла α*, проекции вектора угла поворота sinα* и cosα* и в аналоговом виде: частоты вращения dα*/dt
Рассмотренный аналог имеет недостатки:
необходимость дополнительного АЦП для получения оценки частоты вращения в цифровом виде;
отсутствие юстировочных входов для электрической юстировки датчика относительно вала двигателя и объекта управления;
наличие динамических погрешностей при слежении за координатой α, определяемых первым порядком астатизма следящей системы;
слабая фильтрация оценки производной  , определяемая передаточной функцией фильтра первого порядка
, определяемая передаточной функцией фильтра первого порядка
где T[c] постоянная интегрированная следящей системы;
наличие значительного количества аналоговых элементов с присущими им погрешностями, снижающими потенциальную точность ПВК;
разнородность представления информации в различных точках схемы ПВК, что мешает реализовать известные методы повышения точности оценок, в частности компенсацию ошибки.
Наиболее близким из аналогов (прототипом) является функциональный преобразователь угол-амплитуда-код (Метрология, 1983, N 8, с. 20-26, рис. 1),
Содержащий датчик угла поворота ротора двигателя вращающийся трансформатор, синусный и косинусный сигнальные выходы которого подключены к соответствующим сигнальным входам преобразователя переменного напряжения в постоянное, синусный и косинусный выходы которого подключены к первому и второму входам аналогового коммутатора, выход которого соединен с сигнальным входом аналого-цифрового преобразователя, а также генератор импульсов, соединенный со входом блока управления, выходом которого является шина синхронизации, первый и второй накапливающие сумматоры.
Это амплитудный преобразователь на основе гармонического осциллятора (Вульвет Дж. Датчики в цифровых системах, М. Энергоиздат, 1981, с. 164-169), в котором в процессе преобразования осуществляется поворот вектора, начальные координаты которого определяются выходными сигналами СКВТ, причем задание начальных условий и вращение вектора производится в цифровой форме.
Начальные условия вводят в виде кода тангенса угла, приведенного в первый октант. Получение этого кода и трех старших разрядов кода угла осуществляется преобразователем кода тангенса (ПКТ). На входы аналогового коммутатора (АК) и выявителя октантов (ВО) поступают два сигнала постоянного тока, пропорциональные функциям sin и cos входного угла α. Преобразование сигналов СКВТ в сигналы постоянного тока осуществляется демодуляторами, либо пиковыми детекторами "выборка-память".
По номеру октанта определяются три старших разряда кода, а также сигналы, пропорциональные функции sin и cos угла a, приведенного в 1-й октант (sinβ,cosβ); с помощью линейного АЦП находится код отношения этих сигналов, пропорционального функции tgβ.
Замкнутые в кольцо, два цифровых интегратора, (накапливающие сумматоры НС1 и НС2) представляют собой цифровой осциллятор, описываемый системой разностных уравнений
Y[n]=Y[n-1]-X[n-1]•K;
X[n]=X[n-1]+Y[n-1]•K,
где Y[n] решетчатая функция, соответствующая выходному коду HC1; X[n] решетчатая функция, соответствующая выходному коду HC2; K=2-m число, равное отношению цен разрядов между входами A и B сумматоров HC1 и HC2; m смещение разрядной сетки между входами A и B НС1 и НС2; n число импульсов, поданных на тактовые входы НС1 и НС2.
Полученный в преобразователе кода тангенсов (ПКТ) код тангенса угла b используется для задания начальных условий Y[0] , X[0] 1 М.Е. при решении системы разностных уравнений. Решением системы являются решетчатые функции в виде
, X[0] 1 М.Е. при решении системы разностных уравнений. Решением системы являются решетчатые функции в виде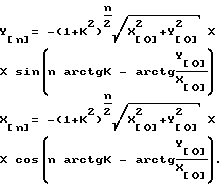
В результате преобразования формируется число импульсный код, вес которого является функцией числа К.
Пользуясь видом решения, можно определить число импульсов n, поданных на тактовые входы НС1 и НС2 с момента начала вращения вектора до момента равенства нулю выходного кода НС1, т.е. Y[n]=0:
Тактовые импульсы продолжают поступать до тех пор, пока исходный вектор не повернется на угол π/4-β в 1, 4, 5-м и 8-м октантах или на угол b во 2, 3, 6-м и 7-м октантах.
При этом на выходах НС1 и НС2 формируются коды модулей синуса и косинуса угла поворота a.
Знаковый разряд кода синуса совпадает со старшим разрядом кода октанта, а знаковый разряд кода косинуса получается суммированием но модулю 2 двух старших разрядов кода октантов.
Амплитудный ПВК на основе цифрового осциллятора формирует цифровые оценки линейную для угла  и проекций вектора
и проекций вектора  и
и 
Известное устройство (прототип) имеет следующие недостатки
отсутствует возможность получения оценки частоты вращения и введения юстировочных поправок;
низкое быстродействие из-за большого времени решения разностных уравнений, что приводит к увеличению динамических погрешностей с ростом частоты вращения.
Цель изобретения расширение функциональных возможностей и повышение быстродействия преобразователя.
Поставленная цель достигается тем, что в устройство, содержащее датчик угла-СКВТ, преобразователь переменного напряжения в постоянное, аналоговый коммутатор, АЦП, генератор импульсов, блок управления с шиной синхронизации, первый и второй цифровые накапливающие сумматоры дополнительно введены: регистры синуса и косинуса, первый и второй цифровые умножители, устройство сравнения, масштабирующий сумматор, первый и второй сумматоры, первый и второй функциональные преобразователи функции cos', первый и второй функциональные преобразователи функции sin, регистр константы юстировки двигателя, регистр константы юстировки координаты объекта управления (нагрузки), формирователь переменного напряжения. К имеющимся в устройстве связям, когда синусный и косинусный сигнальные выходы СКВТ подключены к соответствующим сигнальным входам преобразователя переменного напряжения в постоянное, синусный и косинусный выходы которого подключены к первому и второму сигнальным входам аналогового коммутатора, выход которого соединен с сигнальным входом АЦП, выход генератора импульсов соединен со входом блока управления, выходом которого является шина синхронизации, добавлены новые связи.
Выход АЦП соединен с информационными входами регистров синуса и косинуса, выходы которых соединены с первыми входами первого и второго умножителей соответственно. Выходы умножителей соединены со входами устройства сравнения, а его выход соединен с информационным входом первого накапливающего сумматора и первым информационным входом масштабирующего сумматора, второй информационный вход которого соединен с выходом первого накапливающего сумматора, а выход с информационным входом второго накапливающего сумматора. Выход второго накапливающего сумматора соединен с первым входом первого сумматора и входами первых функциональных преобразователей функций cos и sin, выходы которых соединены со вторыми входами первого и второго умножителей соответственно. Второй вход первого сумматора соединен с выходом регистра константы юстировки двигателя, а его выход с первым входом второго сумматора и входами вторых функциональных преобразователей функций sin и cos. Второй вход второго сумматора соединен с выходом регистра константы юстировки координаты нагрузки. Входы синхронизации преобразователя переменного напряжения в постоянное, аналогового коммутатора, АЦП, регистров синуса и косинуса, масштабирующего и накапливающих сумматоров соединены с шиной синхронизации блока управления. Вход формирователя переменного напряжения соединен с шиной синхронизации, а выход с обмоткой возбуждения СКВТ.
Входом устройства является угол поворота ротора СКВТ, а выходами
выход первого накапливающего сумматора код тахометрического сигнала;
выходы первого и второго сумматора коды координат двигателя и нагрузки привода с поправками на юстировку;
выходы вторых функциональных преобразователей функций cos и sin коды проекций вектора, угла поворота ротора двигателя с поправкой на юстировку.
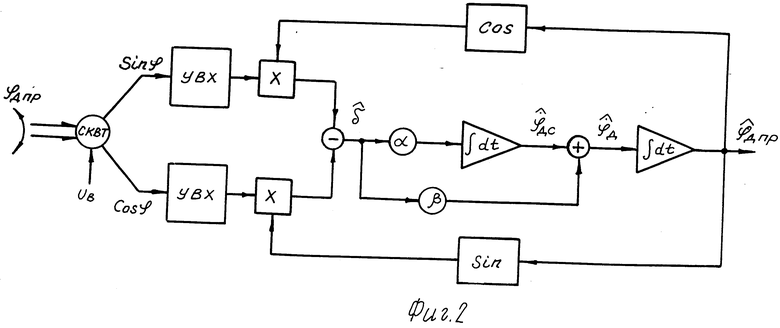
На фиг. 1 дана функциональная схема предлагаемого устройства; на фиг. 2
структурная схема системы непрерывного аналога цифровой следящей системы.
Предлагаемое устройство содержит (фиг.1) датчик положения ротора двигателя ДПР (СКВТ) 1, вход устройства (угол поворота ротора СКВТ ΦДПР), преобразователь переменного напряжения в постоянное 2, аналоговый коммутатор 3, АЦП 4, генератор импульсов 5, блок управления 6, регистры синуса и косинуса 7 и 8, первый и второй умножители 9 и 10, устройство сравнения 11, первый и второй накапливающие сумматоры 12 и 14, масштабирующий сумматор 13, первые функциональные преобразователи функций cos и sin 15 и 16, первый и второй сумматоры 17, 19, регистры констант юстировки двигателя и координаты объекта управления (нагрузки) 18, 20, вторые функциональные преобразователи функций cos и sin 21 и 22, формирователь переменного напряжения 23. ПВК работает следующим образом.
Генератор импульсов 5 формирует на входе блока управления 6 импульсную последовательность с периодом Δt. Блок управления 6 из входной последовательности формирует на шине синхронизации требуемой емкости бит циклическую временную диаграмму импульсов с периодом Δt для тактировки блоков схемы. Синхронно с этим набором импульсов блок управления 6 формирует набор импульсных последовательностей с частотой f0= 2πωo где Δt•f0 M целое число, для преобразования в формирователе 23 в переменное напряжение возбуждения ДПР (СКВТ) 1.
Таким образом, за период работы ПВК (Δt) формируются М периодов напряжения возбуждения UB ДПР 1 частотой f0 и амплитудой U0:
Uв= Uo•sinωot;.
На выходах синусной и косинусной обмоток СКВТ образуются напряжения переменного тока
где m коэффициент трансформации СКВТ;
θ сдвиг фазы несущей частоты;
v электрический угол поворота ротора СКВТ.
Значение угла v связано с углом поворота вала ДПР vДПР соотношение Φ = ΦДПР•iBT, где iBT коэффициент электрической редукции ВТ.
Напряжения US и UC с выхода СКВТ 1 поступают на первый и второй сигнальные входы преобразователя переменного напряжения в постоянное 2. На выходах преобразователя 2 образуются напряжения постоянного тока с амплитудными значениями
Влияние сдвига фазы СКВТ θ устраняется за счет синхронизации тактирующего входа "С" преобразователя 2 по времени с вершиной смещенной синусоиды несущей частоты на выходе СКВТ.
Сигналы  с выходов преобразователя 2 поступают на 1-й и 2-й сигнальные входы аналогового коммутатора 3, на тактирующий вход "С" которого поступают синхроимпульсы с шины синхронизации. Аналоговый коммутатор 3 обеспечивает поочередную коммутацию двух входных напряжений
с выходов преобразователя 2 поступают на 1-й и 2-й сигнальные входы аналогового коммутатора 3, на тактирующий вход "С" которого поступают синхроимпульсы с шины синхронизации. Аналоговый коммутатор 3 обеспечивает поочередную коммутацию двух входных напряжений  на один выход, являющийся входом АЦП 4 и запоминание выходного напряжения в аналоговом запоминающем устройстве выборки хранения на время преобразования АЦП 4. Сигнал на выходе коммутатора 3 соответствует амплитудному значению
на один выход, являющийся входом АЦП 4 и запоминание выходного напряжения в аналоговом запоминающем устройстве выборки хранения на время преобразования АЦП 4. Сигнал на выходе коммутатора 3 соответствует амплитудному значению  .
.
АЦП 4 преобразует напряжения, соответствующие сигналам  , в цифровые эквиваленты, представленные параллельным двоичным кодом, соответственно
, в цифровые эквиваленты, представленные параллельным двоичным кодом, соответственно
где КАЦП коэффициент передачи АЦП, в единицах младшего разряда кода на один вольт входного напряжения. Счетная частота и синхроимпульсы для работы АЦП поступают на его тактирующий вход "С" с шины синхронизации.
Информация о двоичном коде, соответствующая значениям  , после окончания цикла преобразования АЦП 4 записывается в регистры синуса 7 и косинуса 8 соответственно. Синхроимпульсы записи поступают с шины синхронизации на тактирующие входы "С" регистров 7 и 8. В регистрах информация запоминается на период Δt.
, после окончания цикла преобразования АЦП 4 записывается в регистры синуса 7 и косинуса 8 соответственно. Синхроимпульсы записи поступают с шины синхронизации на тактирующие входы "С" регистров 7 и 8. В регистрах информация запоминается на период Δt.
Из регистра синуса информация в параллельном коде поступает на первый вход 1-го умножителя 9, а из регистра косинуса на первый вход 2-го умножителя 10. На вторые входы умножителей (УМН) 9 и 10 также в параллельном двоичном коде поступает информация с выходов первых функциональных преобразователей (ФП) функций cos 15 и sin 16, соответствующая кодам величин  , где
, где  двоичный код цифрового эквивалента угла ΦДПР/iBT, поступающий на входы ФП 15 и 16.
двоичный код цифрового эквивалента угла ΦДПР/iBT, поступающий на входы ФП 15 и 16.
С выходов умножителей 9 и 10, после умножения входных кодов и сокращения формата произведения, информация в виде  поступает на входы устройства сравнения 11, на выходе которого формируется код сигнала рассогласования
поступает на входы устройства сравнения 11, на выходе которого формируется код сигнала рассогласования  цифровой следящей системы в виде разности
цифровой следящей системы в виде разности
Сигнал рассогласования  поступает на вход прямой цепи цифровой следящей системы (ЦСС), которая состоит из цифровых интеграторов первого 12 и второго 14 накапливающих сумматоров (НС) и масштабирующего сумматора 13 За счет замыкания ЦСС по цепи обратной связи, с выхода 2-го НС 14 через первые ФП функций cos 15 и sin 16 на вторые входы УМН 9 и 10, при работе ЦСС автоматически выполняется условие сведения к нулю сигнала рассогласования
поступает на вход прямой цепи цифровой следящей системы (ЦСС), которая состоит из цифровых интеграторов первого 12 и второго 14 накапливающих сумматоров (НС) и масштабирующего сумматора 13 За счет замыкания ЦСС по цепи обратной связи, с выхода 2-го НС 14 через первые ФП функций cos 15 и sin 16 на вторые входы УМН 9 и 10, при работе ЦСС автоматически выполняется условие сведения к нулю сигнала рассогласования  . Условие
. Условие  , как и в аналоге, приводит к обеспечению функционального преобразования выполнению целевой функции ПВК в виде
, как и в аналоге, приводит к обеспечению функционального преобразования выполнению целевой функции ПВК в виде
Таким образом, на выходу 2-го НС 14 вырабатывается код  оценки входного угла поворота Φ в виде линейной функции в диапазоне от 0 до 2π радиан в соответствующем масштабе представления
оценки входного угла поворота Φ в виде линейной функции в диапазоне от 0 до 2π радиан в соответствующем масштабе представления  (единиц младшего разряда кода на радиан).
(единиц младшего разряда кода на радиан).
Устойчивость ЦСС обеспечивается за счет того, что сигнал  , кроме поступления на вход 1-го НС 12, поступает на первый В вход масштабирующего сумматора (МС) 13, на второй вход А которого поступает сигнал
, кроме поступления на вход 1-го НС 12, поступает на первый В вход масштабирующего сумматора (МС) 13, на второй вход А которого поступает сигнал  с выхода первого НС 12. Сигнал с выхода МС 13
с выхода первого НС 12. Сигнал с выхода МС 13  поступает на вход 2-го НС 14, выходом которого и является код оценки
поступает на вход 2-го НС 14, выходом которого и является код оценки  . Поскольку выходом прямой цепи является код угла
. Поскольку выходом прямой цепи является код угла  , то входом последнего интегратора 2-го НС 14 является код несглаженной оценки частоты вращения ДПР
, то входом последнего интегратора 2-го НС 14 является код несглаженной оценки частоты вращения ДПР  , а на выходе первого интегратора ЦСС 1-го НС 12 образуется код сглаженной оценки частоты вращения
, а на выходе первого интегратора ЦСС 1-го НС 12 образуется код сглаженной оценки частоты вращения  .
.
С выхода ЦСС выхода 2-го НС 14 код оценки  поступает на первый вход 1-го сумматора 17. В сумматоре он складывается с кодом поправки ΔД поступающим из регистра константы юстировки двигателя 18. Выходом 1-го сумматора является код оценки
поступает на первый вход 1-го сумматора 17. В сумматоре он складывается с кодом поправки ΔД поступающим из регистра константы юстировки двигателя 18. Выходом 1-го сумматора является код оценки  координаты угла поворота ротора двигателя с поправкой на юстировку, в пределах электрического шага обмотки,
координаты угла поворота ротора двигателя с поправкой на юстировку, в пределах электрического шага обмотки,
После образование кода оценки угла  он с выхода 1-го сумматора 17 поступает также на первый вход второго сумматора 19, на второй вход которого из регистра 20 поступает константа код юстировки ΔН координаты нормали объекта управления (нагрузки привода). На выходе второго сумматора 19 образуется код оценки положения нормали объекта
он с выхода 1-го сумматора 17 поступает также на первый вход второго сумматора 19, на второй вход которого из регистра 20 поступает константа код юстировки ΔН координаты нормали объекта управления (нагрузки привода). На выходе второго сумматора 19 образуется код оценки положения нормали объекта  с поправкой на юстировку
с поправкой на юстировку
Рассмотрим более подробно работу ЦСС, поскольку ее структура и параметры определяют основные метрологические характеристики предлагаемого ПВК - статическую и динамическую точность выработки выходных цифровых оценок фазовых координат привода.
В ЦСС на каждом такте с номером N работы с периодом повторения Δt производится вычисления, которые реализуют методом Эйлера с постоянным шагом интегрирование системы дифференциальных уравнений, описывающих динамику следящей системы непрерывного аналога ЦСС. Последнее допустимо, при малых Δt.
Структурная схема системы непрерывного аналога ЦСС приведена на фиг. 2, где обозначено: УВХ устройство выборки хранения.
Ей соответствует передаточная функция
и уравнение ошибки
где Ka= α[C-2] добротность по ускорению;
T = β/α•[C] постоянная времени; масштабные коэффициенты преобразователей сигналов
масштабные коэффициенты преобразователей сигналов  на входе и выходе устройства.
на входе и выходе устройства.
При замыкании системы выполняется условие  , что позволяет при масштабировании пользоваться зависимостью
, что позволяет при масштабировании пользоваться зависимостью
Отсюда следует, что масштабирование должно обеспечивать равенство крутизны преобразования линейного кода угла и его функции sin в нуле на выходе устройства сравнения. Если принять период величины  равным машинной единице в системе счета с фиксированной слева запятой, т.е. 1 [M.E. 2π, то максимальное значение кодов функций sin и cos, приведенное к выходу устройства сравнения, будет
равным машинной единице в системе счета с фиксированной слева запятой, т.е. 1 [M.E. 2π, то максимальное значение кодов функций sin и cos, приведенное к выходу устройства сравнения, будет
Соответствующие машинные числа, в зависимости от разрядности машинной единицы, представлены в таблице.
Разрядность АЦП должна быть такой, чтобы значение  е.м.р. не превосходило максимум информационной емкости АЦП, с целью избежать дальнейшего перемасштабирования и потери потенциальной точности.
е.м.р. не превосходило максимум информационной емкости АЦП, с целью избежать дальнейшего перемасштабирования и потери потенциальной точности.
Так при 12-разрядном АЦП его емкость составит 212-1 4095 бит, т.е. при работе с 2-х полярным сигналом СКВТ от -2047 до +2047 [е.м.р. В этом случае без искажений воспроизводится значение  [е.м.р. при n 13, и крутизна преобразования АЦП определяется согласно табл. 2 как
[е.м.р. при n 13, и крутизна преобразования АЦП определяется согласно табл. 2 как
При таком масштабировании дискретность оцифровки выходной координаты DΦ в безредукторном приводе составит
При переходе к дискретному времени с номером такта N передаточная функция W(P) реализуется организацией работы цифровых интеграторов с масштабированием в виде следующей процедуры
Поскольку величины α,β,Δt константы, то соответствующих операций умножения можно не производить, ограничившись при определенных ограничениях на выбор коэффициентов α и β изменением масштаба представления машинных чисел и их сдвигом.
Так дискретность выходного кода aДПР-DΦ по отношению к входному  будет определяться константой двукратного интегрирования α×Δt2 (при условии α×Δt∠β). Это безразмерное число и его можно выбрать кратным двойке, т.е.
будет определяться константой двукратного интегрирования α×Δt2 (при условии α×Δt∠β). Это безразмерное число и его можно выбрать кратным двойке, т.е.
α×Δt2= 2r
где r целое число, равное числу разрядов сдвига выходного кода относительно кода ошибки. При малых Δt получаем r<0, т.е. код угла должен располагаться в расширенной вправо разрядной сетке.
Значение величины α[c-2] получим как
От выбора коэффициента α зависит диапазон работы первого интегратора и дискретность кода сглаженной оценки частоты вращения  , определяемая как
, определяемая как
При выборе коэффициента b и масштабировании операции суммирования
используются следующие соображения:
1) Выравнивание масштабов на входе масштабирующего сумматора проводится по кратности двойке, т.е.
α×Δt = 2-q×β
где q целое, равное числу разрядов левого сдвига когда  при суммировании.
при суммировании.
2) На выбор β по п. 1 накладываются ограничения по амплитудно-- и фазо-частотной характеристикам (АЧХ и ФЧХ) ЦСС в существенном диапазоне частот, определяемом требованиями к системе управления моментальным двигателем, в соответствии с формулами связи параметров
где wc [C-1] частота среза АЧХ разомкнутой следящей системы - непрерывного аналога ЦСС,
ξ коэффициент затухания колебательного звена, образованного замкнутой системой.
Для максимально гладкой АЧХ замкнутой системы с передаточными функциями по углу
и по частоте вращения со сглаживанием
в литературе (Активные RC-фильтры на операционных усилителях: Пер. с англ. /Под ред. Г.Н. Алексакова. М. Энергия, 1974) рекомендовано значение ξ 0,884. При этом для коэффициента b получим опорное значение bo
вокруг которого будут варьироваться дискретные значения β, соответствующие условиям п. 1.
Таким образом значения величин Dt, DΦ (n) r, q полностью определяют точностные и динамические параметры следящей системы.
Быстродействие устройства обеспечивается быстродействием входного АЦП и аппаратной реализацией схемы цифровой обработки, а многофункциональность - структурой ЦСС, схемой юстировки и функциональными преобразователями тригонометрических функций. Метрологические показатели определяются разрядностью АЦП, величиной тактового интервала Dt и параметрами α и β ЦСС, как было показано выше.
Предлагаемое изобретение может быть выполнено на стандартных элементах, выпускаемых промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1990 |
|
SU1758875A1 |
| Преобразователь угла поворота вала в код с самоконтролем | 1987 |
|
SU1462484A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1751850A1 |
| Функциональный преобразователь угла поворота вала в код | 1982 |
|
SU1080174A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1076935A1 |
| Функциональный преобразователь угла поворота вала в код | 1985 |
|
SU1309314A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1365353A2 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| Функциональный преобразователь угла поворота вала в код | 1984 |
|
SU1262728A1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА | 1973 |
|
SU367442A1 |

Изобретение относится к измерительной технике и может быть использовано в системах управления положения электромеханических объектов. Цель изобретения - расширение функциональных возможностей и повышение быстродействия. Преобразователь содержит датчик угла поворота ротора двигателя, выполненный в виде вращающегося трансформатора, преобразователь переменного напряжения в постоянное, аналоговый коммутатор, генератор импульсов, первый, второй цифровые накапливающие сумматоры, регистры синуса и косинуса, первый и второй цифровые умножители, устройство сравнения, масштабирующий сумматор, первый и второй сумматоры, первый и второй функциональные преобразователи функции cos, первый и второй функциональные преобразователи функции sin, регистр константы юстировки двигателя, регистр константы юстировки координаты объекта управления и формирователь переменного напряжения. 2 ил., 1 табл.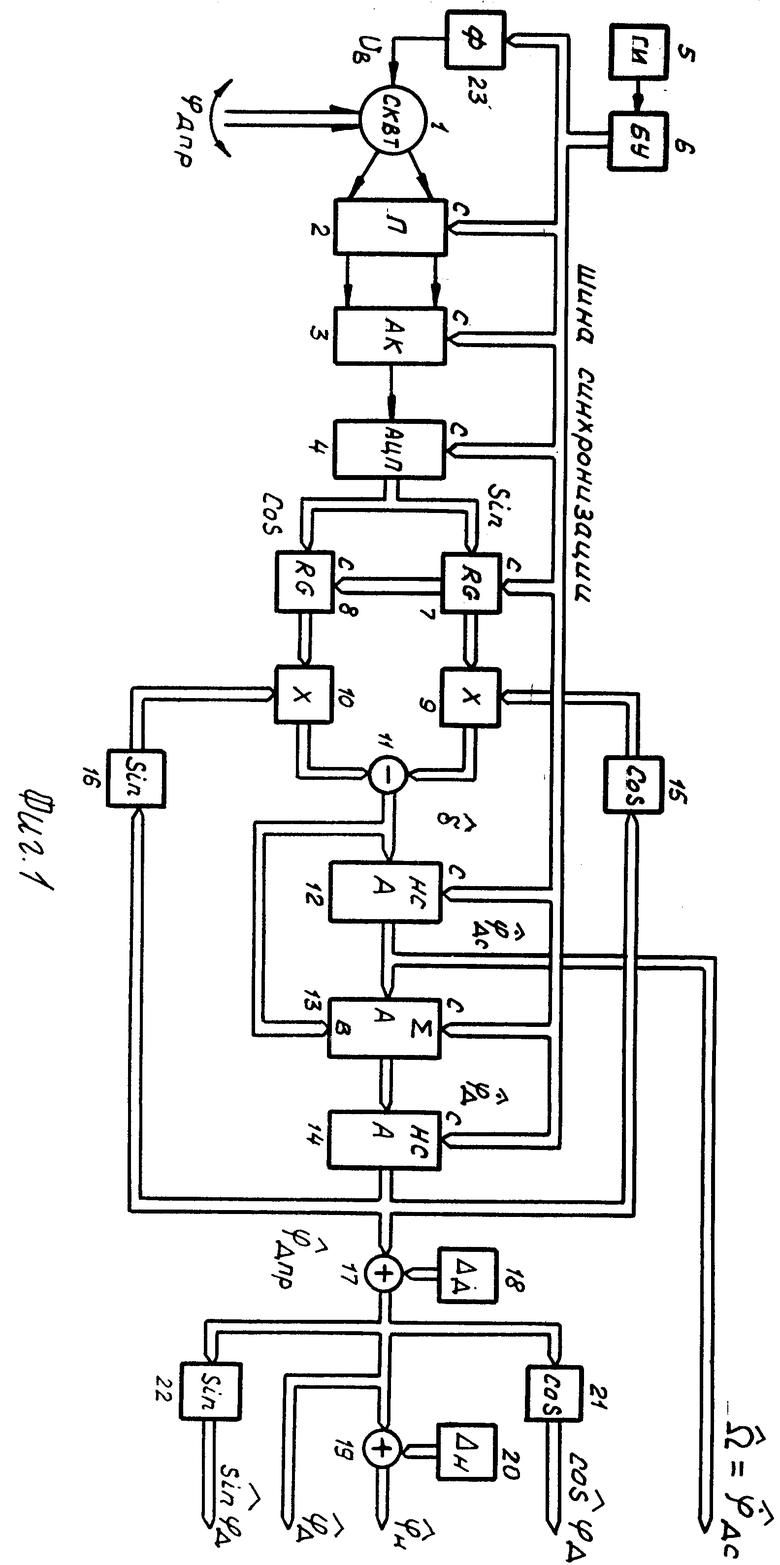
Быстродействующий многофункциональный преобразователь угла в код для устройств электромеханотроники, содержащий аналоговый коммутатор, блок управления, преобразователь переменного напряжения в постоянное, аналого-цифровой преобразователь, генератор импульсов, первый и второй накапливающие сумматоры и датчик угла поворота ротора двигателя, выполненный в виде вращающегося трансформатора, синусный и косинусный сигнальные выходы которого подключены к соответствующим сигнальным входам преобразователя переменного напряжения в постоянное, синусный и косинусный выходы которого подключены к первому и второму сигнальным входам аналогового коммутатора, выход которого соединен с сигнальным входом аналого-цифрового преобразователя, выход генератора импульсов соединен с входом блока управления, выход которого является шиной синхронизации, отличающийся тем, что в него дополнительно введены регистры sin и cos, первый и второй цифровые умножители, устройство сравнения, масштабирующий сумматор, первый и второй сумматоры, первый и второй функциональные преобразователи функции cos, первый и второй функциональные преобразователи функции sin, регистр константы юстировки двигателя, регистр константы юстировки координаты объекта управления и формирователь переменного напряжения, причем угол поворота ротора вращающегося трансформатора является входом преобразователя, выход аналого-цифрового преобразователя соединен с информационными входами регистров sin и cos, выходы которых соединены с первыми входами первого и второго умножителей соответственно, выходы которых соединены с входами устройства сравнения, выход которого подключен к информационному входу первого накапливающего сумматора и к первому информационному входу масштабирующего сумматора, второй информационный вход которого соединен с выходом первого накапливающего сумматора, а выход подключен к информационному входу второго накапливающего сумматора, выход которого соединен с первым входом первого сумматора и с входами первых функциональных преобразователей функций cos и sin, выходы которых соединены с вторыми входами первого и второго умножителей соответственно, второй вход первого сумматора соединен с выходом регистра константы юстировки двигателя, выход первого сумматора подключен к входам вторых функциональных преобразователей функций sin и cos и к первому входу второго сумматора, второй вход которого соединен с выходом регистра константы юстировки координаты объекта управления, шина синхронизации блока управления соединена с входами синхронизации преобразователя переменного напряжения в постоянное, аналогового коммутатора, аналого-цифрового преобразователя, регистров cos и sin, масштабирующего и накапливающих сумматоров и с входом формирователя переменного напряжения, выход которого подключен к обмотке возбуждения вращающегося трансформатора, выход первого накапливающего сумматора является выходом кода тахометрического сигнала преобразователя, выходами кода координаты двигателя и нагрузки с поправками на юстировку которого являются выходы соответственно первого и второго сумматоров, выходы вторых функциональных преобразователей функции cos и sin являются в преобразователе соответственно выходами кодов ортогональных составляющих вектора угла поворота ротора двигателя с поправкой на юстировку.
| Преобразователь угла поворота вала в код | 1986 |
|
SU1417190A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Метрология | |||
| Ежемесячное приложение к научно-техническому журналу "Измерительная техника", N 8, 1983 | |||
| Кудряшов Б.А | |||
| Функционельный преобразователь угол - амплитуды - код | |||
| - Изд-во стандартов, с.22. | |||
