SI
Iwii
(Г)
Изобретение относится к автоматике и вычислительной технике и может быть использовано для измерения углового положения и угловой скорости вращающихся объектов.
Целью изобретения является повы щение точности преобразователя и расширение его функциональных возможностей за счет обеспечения съема сигнала пропорционального скорости изменения утла поворота вала преобразователя.
На чертеже изображена схема пред лагаемого преобразователя.
Преобразователь содержит датчик I, демодуляторы 2 и 3, перемножителй 4 и 5 блок 6 сравнения, преобразователь 7 напряжение - частота (ПНЧ), реверсивный счетчик 8, блок 9 задания сдвига фаз, сумматор 10, функциональные преобразователи 11 и 12,
Устройство работает следующим образом.
На входы демодуляторов 2 и 3 от датчика положения подаются сигналы и и Uj, В качестве датчика положения можно использовать любое известное устройство .(например, СКВТ или сельсин), формирующее выходные сигналы вида:.
и, А sin со t sin oi ; Uj А sin cot sin(ei,+tp),
где A - амплитуда опорного сигнала; со - частота опорного сигнала; ei- - угол поворота ротора датчика; ( - сдвиг фаз огибающих выходных
сигналов датчика. На первые входы перемножителей 4 и 5с амплитудных демодуляторов 2 и 3 поступают сигналы
и А sin ci ; U А sin(oi.+tf).
На вторые входы перемножителей 4 и 5 с синусных функциональных преобра зователей 11 и 12 в цифровом виде поступают сигналы
71902
С выхода перемножителей 4 и 5 на блок 6 сравнения поступают сигналы
и А sinoC sin(oL + ) ; Uo А sin(ei+U) sin ос.,
а
На выходе блока 6 сравнения получаем сигнал
to и A(sinoC sin() - sin(oi.+q))sin),
Величина U задает частоту,ПНЧ 7, а знак управляет направлением счета
15 реверсивного счетчика 8 таким образом что величина сигнала Ug стремится к нулю.
Сведение сигнала и„ к нулю осущег-, ствляется в преобразователе автома20 тически за счет соответствующего изменения измеренного значения утла поворота ротора датчшса oi, , равного коду на выходе счетчика 8, В случае, если сдвиг фаз входных сигналов
25 преобразователя ( не равен сдвигу фаз Cj) сигналов, сформированных в функциональных преобразователях 11 и 12, равенство нулю сигнала Ug наступает при , не равном Ы. ,
30 В результате разница значений Ср и СО, равная utf , приводит к ошибке преобразования угла „ Различные датчики характеризуют разные значения сдвига фаз Ц) выходных сигналов
35 (для СКВТ 4 90, для сельсина ср 120°), Кроме того, в реальных датчиках из-за погрешностей изготовле- ния сдвиг фаз ср между огибающими выходных сигналов отличается от пас40 портного значения. Поэтому, чтобы получить измеренное значение угла поворота ротора датчика uL „ равное действительному углу поворота ротора датчика yL , надо обеспечить формиродс вание сигналов Uj и Ug функциональными преобразователями 11 и 12 со сдвигом фаз СР , равным сдвигу фаз.,а сигналов и и V конкретного датчика подключенного к преобразователю. Ее-
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1293842A1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1319226A2 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1751850A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2012 |
|
RU2517055C1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1088045A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для измерения угло- : вого положения и угловой скорости вращающихся объектов. Цель изобрете - ния повьшение точности преобразова теля и расширение его функциональных возможностей за счет обеспечения съема сигнала, пропорционального скорое ти изменения угла поворота вала преобразователя. Преобразователь содержит датчик 1, демодуляторы 2,3, перемно - жители 4,5, блок 6 сравнения, преобразователь 7 напряжение - частота, реверсивный счетчик 8, блок 9 задания, сдвига фаз, сумматор 10, функциональные преобразователи П, 12, 1 з.п. ф-лыэ 1 ил.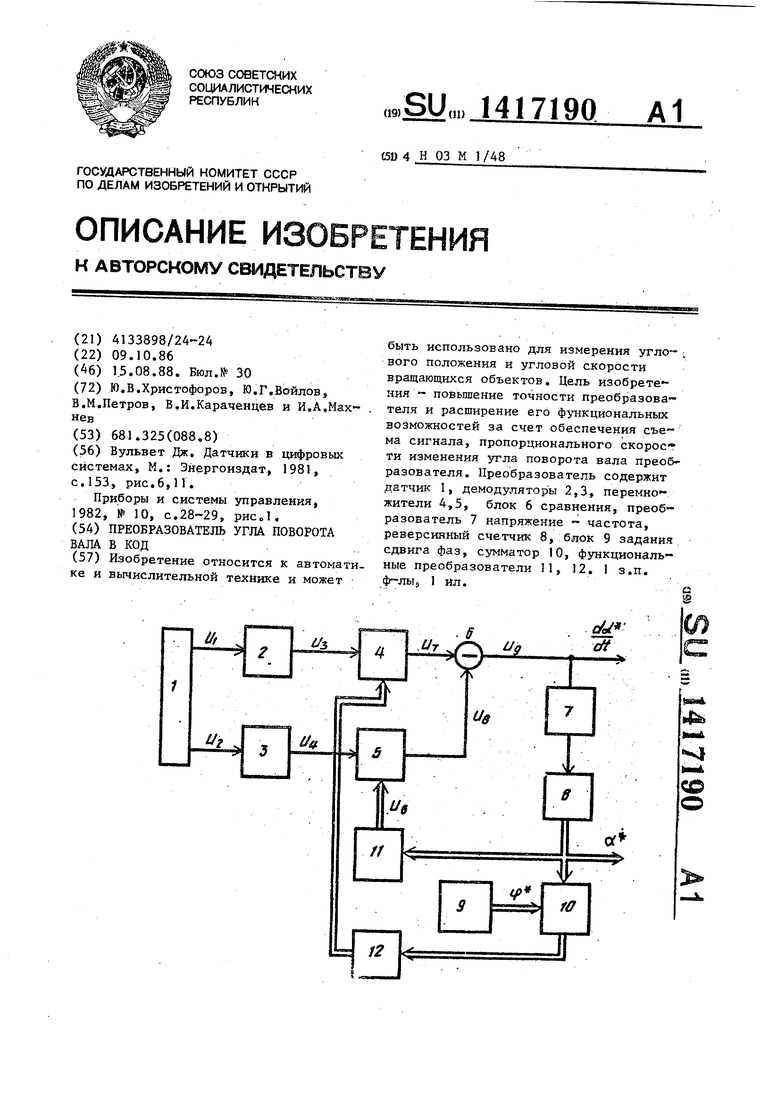
Uj- sin(oi.+ q-);
и.
sin oi- ,
uL - измеренное значение угла поворота ротора датчика; сдвиг фаз сигналов, сформированных в синусных функциональных преобразователях 11 и 12.
ли Cf q , то выраг-сение для сигнала и„ на выходе блока б сравнения можно записать в следующем виде:
А sincf sinCoi-oi.),
Схема преобразователя по прежнему стремился свести величину сигнала к нулю, но в этом случае равенство и, нулю возможно только при oi od
. исключается ошибка измерения, вызванная неравенством q к i , s. код oi, на выходе счетчика 8 равен углу поворота ротора датчика. Уста- новка tf равного q может о суще- ствляться оператором при .настройке преобразователя под конкретный датчик. Для этого ротор датчика поворачивается на определенный угол, напри- мер на 90 , и олератор с помощью блока 9 задания кода сдвига фаз устанавливает такое значение tj , при котором код на вькоде преобразователя ot равен углу установки ротора дат- чика о
Блок 9 задания кода сдвига фаз в простейшем случае может быть вьшол- нен в виде тумблерного регистра, на котором набирается цифровой код, соответствующий сдвигу фаз Cf датчика, подключенного к преобразователи., Код сдвига фаз cf с выхода блока 9 задания кода сдвига фаз подается на вторые входы сумматора 10, на первые входы которого с выхода счетчика 8 подается код Ы. . С выхода сумматора 10 код &.+ tf по дается на входы второго синусного функционального пре образЬвателя 12. На входы первого си нусного функционального преобразователя 11 с выхода счетчика 8 поступает код oi,.
Так как последовательно включенные ПНЧ и счетчик выполняют операцию циф- рового интегрирования входного сигнала, то, следовательно.,
0 U,cit,
о
Т.е. на выходе блока 6 сравнения полу чаем сигнал, пропорциональный угловой скорости поворота ротора датчика:
и.
d6i-
ормула
и 3 о о р е т с 1 t я
5
0 5 0
5
0
5
| Вульвет Дж | |||
| Датчики в цифровых системах, М.: Энергоиздат, 1981, с.153, рис.6,11 | |||
| Приборы и системы управления, 1982, № 10, с.28-29, . |
