Изобретение относится к машиностроению, предназначено для передачи поступательного и вращательного ударных импульсов и может быть использовано в качестве импульсного мотор-редуктора с большими моментами на выходном валу (например, в грузоподъемных и тяговых механизмах, гайковертах и др.), в перфораторах для бурения отверстий в каменных материалах, в устройствах для забивки гибких стержней в относительно твердую среду (например, для забивки электродов заземления, спиц в костную ткань при ортопедических операциях и т.п.) и для других видов работ.
Известен механизм ударного действия (электрический перфоратор), предназначенный для передачи поступательного и вращательного ударных импульсов, содержащих корпус, размещенный в нем двигатель, боек и узел поворота бойка в виде дополнительной обмотки электродвигателя, которая обеспечивает ему вращательный импульс при взаимодействии с муфтой-буксой, имеющей коническое отверстие для размещения рабочей части бойка [1]
Недостатком известного механизма является сложность практической реализации намотки двигателя для осуществления одновременного поступательного и вращательного движений бойка-якоря-ротора. Кроме того, расположение поворотного узла в самом двигателе заметно уменьшает его КПД и удельную мощность на единицу его веса, так как снижает его обороты и количество циклов в единицу времени.
Известно устройство ударного действия [2] содержащее корпус и размещенные в нем ударный узел с двигателем, боек и поворотный узел, выполненный заодно с двигателем вращательного или поступательного действия, т.е. боек-якорь или боек-ротор связан с пружиной кручения или кулачком, или кривошипом, которые позволяют двигателю с простой обмоткой (соленоид или ротор) осуществлять винтообразные движения бойка, что заметно проще. Однако остается главный недостаток поворотный узел кинематически и динамически связан с двигателем через боек-ротор или боек-якорь, что существенно влияет на КПД работы двигателя в сторону его понижения и на потерю устойчивости автовиброударного режима двигателя.
Известен также поворотно-ударный механизм [3] содержащий корпус, размещенный в нем двигатель, боек с одним по крайней мере ударным торцом, поворотное устройство, включающее переходник, установленный с возможностью контактирования с ударным торцом бойка, и держатель рабочего органа. Поворот рабочего органа осуществляется с помощью упругих скошенных зубьев или специальных упругих шайб. Двигатель работает в своем номинальном авторежиме, так как он не связан постоянно через свой боек с поворотным узлом, а отдает свою накопленную на пути разгона кинетическую энергию только в моменты соударения с приводным элементом.
Недостатком механизма являются большие абсолютные деформации зубьев, выполненных из упругого материала: вулканита, резины или тонкой гибкой стали. Эти деформации обеспечивают поворот устройства, но из-за податливости зубьев не удается развить большие вращательно-ударные импульсы. Вращение рабочего органа (инструмента) обеспечивается в том случае, если рабочий орган не упирается в забой. Скорость вращения рабочего органа значительно уменьшается. Это объясняется тем, что при ограничении инструмента обрабатываемым объектом, осевые перемещения держателя инструмента (патрона), необходимые для интенсивного вращения инструмента, возможны лишь при отходе корпуса молотка от забоя. При нажатии на молоток отход корпуса от забоя уменьшается и поворотное устройство становится неработоспособным.
Задачей изобретения является повышение КПД и работоспособности поворотно-ударного механизма, а также расширение его функциональных возможностей.
Задача может быть решена за счет того, что поворотно-ударный механизм по первому варианту, содержащий корпус, размещенный в нем двигатель, боек с ударным торцом, поворотный узел с приводным элементом, установленным с возможностью взаимодействия с ударным торцом бойка, и держатель рабочего органа, снабжен двумя пружинами, корпус выполнен с винтовыми пазами, поворотный узел включает буксу с зубьями, расположенную по направляющим между корпусом и держателем рабочего органа, приводной элемент выполнен из трех частей, причем одна часть приводного элемента выполнена с выступами, расположенными в винтовых пазах корпуса, третья с коническими зубьями, сопряженными с зубьями буксы, а боковая поверхность второй части приводного элемента и боковая поверхность держателя рабочего органа охвачены соответствующими пружинами, одни торцы которых оперты на корпус, а другие - соответственно на приводной элемент и буксу.
При этом приводной элемент выполнен с конической полостью, а держатель рабочего органа в виде подпружиненных цанговых клиньев, расположенных в конической полости приводного элемента.
Поворотно-ударный механизм по второму варианту, содержащий корпус, размещенные в нем двигатель, боек с ударным торцем, поворотный узел с приводным элементом, установленным с возможностью взаимодействия с ударным торцем бойка, и держатель рабочего органа, снабжен пружиной сжатия, поворотный узел включает обгонную муфту, установленную между корпусом и приводным элементом, выполненным с выступами, держатель рабочего органа выполнен с винтовыми пазами, в которых размещены выступы приводного элемента, а ее свободный торец оперт на приводной элемент.
Задача может быть решена также за счет того, что поворотно-ударный механизм по третьему варианту, содержащий корпус, размещенный в нем двигатель с обмотками соленоида, боек, поворотный узел с приводным элементом, установленным с возможностью взаимодействия с бойком, рабочий орган и держатель рабочего органа, снабжен пружинами, корпус имеет сквозные пазы в стенках и выполнен в виде магнитопровода, приводной элемент выполнен в виде профилированного колеса и установлен на валу рабочего органа, боек выполнен с тремя цилиндрическими ступенями, причем крайние ступени бойка сопряжены со средней оппозитно расположенными клинообразными участками, входящими в зацепление с профилированным колесом, а свободные торцы крайних цилиндрических ступеней оперты на торцы соответствующих пружин, другие торцы которых закреплены на корпусе, а обмотки соленоида расположены на крайних цилиндрических ступенях бойка и подключены через встречно включенные диоды и регулятор напряжения к источнику питания.
В поворотно-ударном механизме по четвертому варианту, боек выполнен в виде тела вращения, имеющего по крайней мере, один зуб, а приводной элемент выполнен в виде зубчатого колеса, входящего в зацепление с бойком.
Четыре варианта выполнения поворотно-ударного механизма (ПУМ) объединены в одной заявке в связи с тем, что все они решают одну и ту же задачу - повышение КПД и работоспособности ПУМ, а также расширение его функциональных возможностей принципиально одним и тем же путем: кинематическая связь двигателя с поворотным узлом, которая имеет место в известных конструкциях (через редуктор или кривошипный, или кулачковый механизмы и т.п.) разрывается, что позволяет получить рациональное использование и преобразование поступательного или вращательного движения бойка в винтовое приводного элемента со значительным ударно-импульсным передаточным отношением, что в свою очередь дает возможность применять такой поворотно-ударный механизм (ПУМ) в перфораторах, мотор-редукторах, устройствах для забивки гибких стержней в относительно твердую среду и др.
В отличие от мягких зубьев прототипа, которые могут работать лишь при больших абсолютных деформациях (не менее 3-4 мм) и выполненных из резины, вулканита или тонких стальных пластин, предлагаемые варианты поворотно-ударного механизма снабжены жесткими выступами, которые периодически входят и выходят из ударно-прочного зацепления, передавая рабочему органу исполнительного механизма поступательные и вращательные ударные импульсы с силовыми параметрами во много раз большими, чем силы и моменты вала-бойка двигателя.
На фиг.1-9 показаны предложенные схемы поворотно-ударного механизма: на фиг.1,2 реализация предложенной схемы ПУМ в перфораторе (по первому и второму варианту выполнения ПУМ соответственно); на фиг.3 реализация заявляемой схемы ПУМ (по первому варианту выполнения) в установке для забивки гибких стержней; на фиг.4-6 схемы ПУМ мотор-редуктора по третьему варианту выполнения; на фиг.7-9 схемы ПУМ мотор-редуктора по четвертому варианту выполнения.
Перфоратор (фиг.1) содержит боек 1, соединенный с упругой связью 2 и находящийся в стволе двигателя соленоида 3 на одной оси с приводным элементом 4, держателем рабочего органа 5, рабочим органом (инструментом) 6 и буксой 7, расположенными в корпусе 8. Приводной элемент 4 имеет боковые выступы ролики 9, расположенные с возможностью перемещения в винтовых пазах 10, и конические зубья 11, сопряженные с зубьями буксы 7, на которую оперта одним торцом пружина 12, другой торец которой оперт на корпус 8. Приводной элемент 4 расположен внутри пружины 13, которая одним своим торцом также оперта на корпус 8, а другим торцом на приводной элемент 4. Букса 7 связана с держателем рабочего органа 5 шлицевым или шпоночным соединением 14.
Работает перфоратор следующим образом. Разогнавшись с помощью двигателя-соленоида 3 до определенной скорости, боек 1 ударяет приводной элемент 4, передав ему кинетическую энергию ударом. С помощью выступов-роликов 9 в двух противоположных винтовых пазах приводной элемент 4 движется винтообразно, сжимая пружину 13, а через зубчатое зацепление 11 букса 7 вращает держатель рабочего органа 5 и благодаря шлицевому (или скользящей шпонке) соединению 14 вместе с ним вращается инструмент 6. Приводной элемент 4, дойдя до ударного торца держателя рабочего органа 5, ударяет по нему, передавая через него энергию удара поступательного движения. Таким образом, инструмент 6, кроме вращательного импульса за время скольжения буксы 7 относительно держателя рабочего органа 5 по шлицевой поверхности 14, получает поступательный ударный импульс, т.е. осуществляется ударно-поворотная разработка обрабатываемого материала инструментом 6. Затем пружина 12 возвращает буксу 7 в исходную позицию, а пружина 13 размыкает зубчатое зацепление 11 и приводной элемент 4 занимает верхнее положение, по которому боек 1 вновь наносит удар, и цикл повторяется.
Описание работы конструкции ПУМ свидетельствует о том, что двигатель работает кинематически независимо от поворотного узла, отдавая свою энергию лишь при ударе бойка 1 по приводному элементу 4 в кратковременные моменты их ударного контакта, которые в сотни раз меньше периода одного цикла.
На фиг.2 показан другой вариант поворотного узла перфоратора.
Приводной элемент 4 имеет выступы-ролики 9, находящиеся в винтовых пазах 10 с возможностью скольжения в них. Пазы 10 расположены в держателе рабочего органа 5, внутри которого находится пружина сжатия, упирающаяся одним своим торцем в держатель рабочего органа, а другим в приводной элемент 4. Между приводным элементом 4 и корпусом 8 закреплена обгонная муфта 15.
Работает поворотный узел следующим образом. При ударе бойком по приводному элементу 4 он движется вместе с выступами-роликами 9 из-за обгонной муфты 15 только поступательно. Держатель рабочего органа 5 из-за винтовых пазов 10 вращается вместе с инструментом (на фиг.2 не показан) вокруг своей продольной оси. Затем приводной элемент 4, сжав пружину, ударяется своим вторым ударным торцем по держателю рабочего органа, передавая ему и инструменту поступательный ударный импульс. После этого сжатая пружина возвращает приводной элемент 4 в исходное положение, при этом обгонная муфта в другом направлении позволяет поворачиваться приводному элементу 4, а держатель рабочего органа 5 с инструментом остаются в это время неподвижны, и цикл повторяется.
На фиг.3 изображена схема ПУМ для забивки гибких стержней в относительно твердую среду. Механизм содержит боек 1, один конец которого обращен к пружине 2, а другой ударный имеет возможность контактировать с приводным элементом 4, имеющим выступы-ролики 9, находящимися в винтовых пазах корпуса 10. Боек 1 разгоняется соленоидом 3. Приводной элемент 4 и крышка 16 имеют конические полости, в которых находятся цанговые клинья 17 и 18, поддерживаемые соответственно пружинами 19 и 20. Приводной элемент 4 подперт пружиной 12, другой конец которой обращен к упорному подшипнику 21, насаженному на втулку 22, вставленную в корпус 8. Забиваемый гибкий стержень 6 плотно охвачен по части длины цанговыми клиньями 17 и 18, сменной втулкой 22 и средой 23, в которую он внедряется. Между пружинами 2 и 20 расположена шайба 24, опертая в крышку 16. Соленоид 3 включается каждые половину периода с помощью диода 25.
Работает устройство следующим образом. Соленоид 3 и пружина 2 разгоняют при прохождении через диод 25 полуволны "напряжение-ток" боек-якорь 1, который ударяет приводной элемент 4. При этом цанговые клинья 17 захватывают забиваемый стержень 6 и передают ему часть кинетической энергии удара приводного элемента 4, внедряя стержень в среду 23. Приводной элемент 4 после удара с бойком 1 из-за выступов-роликов 9, которые находятся в винтовых пазах 10, движется вниз по винтовой линии, передавая с помощью клиновых цанговых клиньев 17 поступательный и вращательный ударные импульсы забиваемому стержню 6, что является более производительным, чем только поступательный импульс (как в известных устройствах для забивки электродов) или только вращательный (как, например, дрель и т.п. установки). Пружина 12, опирающаяся в упорный подшипник 21, служащий для уменьшения трения между пружиной 12 и корпусом 8, после остановки приводного элемента 4 поднимает его, расклинивая при этом клинья 17. Боек 1 в это время с помощью системы "пружина 2 соленоид 3" снова набирает скорость, происходит удар, и цикл повторяется.
Для лучшей устойчивости забиваемого стержня 6 и предотвращения обратного "выдергивания" стержня 6 при расклинивании деталей 17 предусмотрен второй клиновой захват 18 с пружиной 20 и конусной полостью крышки 16. Для разного диаметра забиваемых стержней могут быть предусмотрены сменные втулки 22.
Реализация предлагаемой схемы ПУМ в мотор-редукторах проиллюстрирована на фиг.4-9.
Мотор-редуктор содержит корпус 8, выполненный в виде магнитопровода со сквозными пазами в его стенках, размещенные в нем двигатель с обмотками соленоида 3, приводной элемент 4, выполненный в виде профилированного колеса, взаимодействующего с бойком 1. Боек выполнен с тремя цилиндрическими ступенями, причем крайние ступени бойка сопряжены со средней оппозитно расположенными клинообразными участками 26, входящими в зацепление с профилированным колесом 4, а свободные торцы крайних цилиндрических ступеней оперты на торцы соответствующих пружин 2, другие торцы которых закреплены на корпусе. Приводной элемент (профилированное колесо) 4 закреплен на валу 27 рабочего органа 28 или редуктора 29, выходной вал которого соединен через муфту с рабочим органом 28 (барабан, звездочка и т.п.). Обмотки 3 подключены к источнику переменного тока (напряжения) через диоды 25 и 30, включенные встречно, и регулятор напряжения 31. В частности, регулятором напряжения могут быть последовательные или параллельные выключатели разъединители 32-35, катушек 36-39, соленоидов 3.
Устройство работает следующим образом. При включении цепи электрического переменного тока полуволна одного знака, проходя через диод 25, включает соленоид 3, который втягивает якорь-боек 1 и сжимает пружину 2. При этом центр виброударных колебаний смещен влево, то происходит удар правого клинообразного участка 26 бойка 1 по приводному элементу 4, т.е. имеем вращение приводного элемента 4 и вала 27 против часовой стрелки. Вал 27 является входным валом червяка червячного редуктора 29 (или винта винтового механизма, или подобного самотормозящегося устройства). При следующем полупериоде переменного тока (напряжения) диод 25 отключен, а действует диод 30, который включает соленоид справа (фиг.4), увеличивая кинетическую энергию бойка 1 и сжимая пружину 2 (справа) для использования ее энергии в последующем полупериоде, происходит удар левого клинообразного участка 26 по приводному элементу. Затем происходит вновь включение диода 25, боек 1 движется влево и наносит удар по приводному элементу 4, цикл повторяется.
Регулятор напряжения (тока) 31 служит для реверсирования вращения приводного элемента 4. Подавая различные напряжения на соленоиды 3, центр виброударных колебаний смещается влево или вправо. Так, если больше напряжение (ток) в левой катушке центр виброударных колебаний смещается влево и удар будет производиться только правым зацеплением бойка 1, а левая часть 26 не будет входить в контакт с приводным элементом 4, т.е. вращение вала 27 будет против часовой стрелки.
При большем напряжении (токе), подаваемом на правую катушку, имеем аналогичное ударно-импульсное взаимодействие бойка 1 с поверхностью 26 слева, т. е. вращение вала 27 и приводного элемента 4 будет происходить по часовой стрелке.
При симметричном уменьшении напряжения (тока) в катушках 3 имеем меньшую энергию бойка 1, что влечет уменьшение угловой скорости приводного элемента 4 и всего привода.
На фиг. 6 показан пример осуществления возможности реверсирования и изменения угловых скоростей за счет не регулирования напряжения (тока), а с помощью различных подключений катушек соленоидов 36-39 с помощью переключателей 32-35.
Так, если одновременно включены 33-35 и соответственно катушки 37-39, то происходит смещение центра виброударных колебаний вправо и вращение приводного элемента 4 по часовой стрелке. Аналогично при включении 32-34 и 36-38 имеем вращение против часовой стрелке.
Для уменьшения угловой скорости можно включить две малые катушки соленоидов и одну большую, например, 36,38,39 или 36,37,39. благодаря червяку или винту с валом 27 происходит передача ударно-импульсного момента большой величины. При этом, как известно, большие моменты на рабочем органе 28 не передаются обратно и стопорятся парой "винт-гайка" или "червяк-колесо", или т.п. устройством, что не требует стопорных устройств типа храпового механизма. При этом угловое перемещение шкива в результате ударно-импульсного взаимодействия с бойком 1 может быть весьма различным в зависимости от рабочей нагрузки исполнительного механизма 28, не отражаясь на номинальном режиме работы двигателя и привода.
На фиг. 4 и 5 зацепление клинообразных участков 26 бойка с приводным элементом шкивом 4, может быть в виде ударопрочных зубьев или за счет трения в желобе шкива, когда сила трения из-за клина увеличивается, т.е. приведенный коэффициент трения скольжения становится равным
где f коэффициент трения между материалом бойка 1 в месте зацепления с приводным элементом 4; α угол желоба шкива, в котором заклинивается в процессе удара боек-якорь 1.
На фиг. 7 показан вариант зацепления бойка-якоря 1 зубом 40 за зубчатое колесо приводной элемент 4.
Зубчатое зацепление бойка 1 имеет по крайней мере один зуб 40, взаимодействующий с зубьями приводного элемента 4.
На фиг.7 боек 1 совершает возвратно-поступательные движения, которые за счет ударов зубом 40 превращаются во вращательное приводного элемента шкива 4. При этом изменение направления вращения может достигаться или перемещением центра виброударных колебаний бойка 1, как было показано выше, или за счет перемещения вала приводного элемента 4 влево или вправо производится левым зубом 40, поэтому вращение приводного элемента шкива 4 будет по часовой стрелке. При перемещении вала вправо по команде оператора происходит изменение вращения приводного элемента шкива 4, удары будут производиться правым зубом бойка 1 и вращение приводного элемента шкива 4 против часовой стрелки.
На фиг.8 изображен боек 1 вращательного действия. Он имеет два одинаковых зуба 40, которые соударяются с зубьями приводного элемента-шкива 1. При этом накопление кинетической энергии бойка происходит на угловом пути половины оборота, развивая мгновенные и значительные по величине моменты, которые затем действуют на рабочий исполнительный механизм.
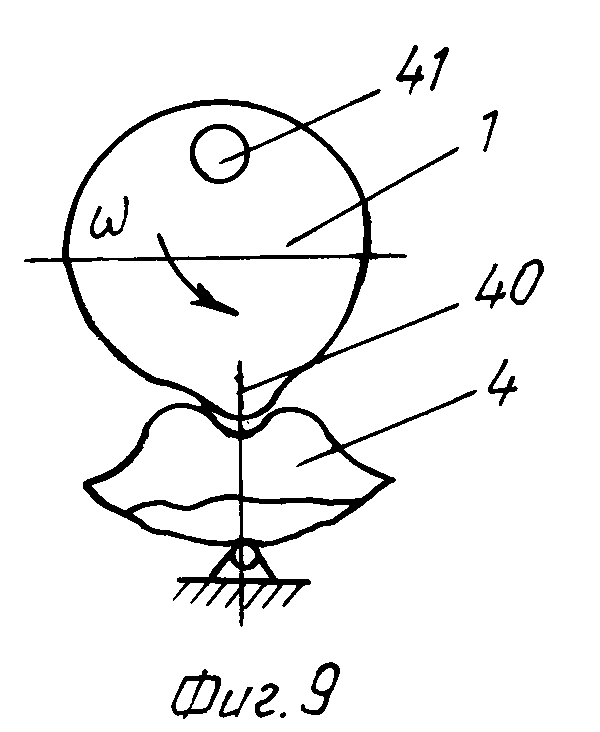
На фиг. 9 изображен боек вращательного действия, имеющий один зуб 40 и противовес 41. При этом накопление кинетической энергии бойка будет происходить на угловом пути целого оборота.
Таким образом, поворотно-ударный механизм, у которого отсутствует постоянная кинематическая связь с двигателем и имеется возможность импульсного автоматического и периодического расцепления и жесткого зацепления-контактирования с ударным торцем бойка имеет ряд существенных преимуществ по сравнению с известными и может найти широкое применение при создании перфораторов, мотор-редукторов и др. импульсных машин и механизмов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 1991 |
|
RU2020054C1 |
| Электрический перфоратор | 1985 |
|
SU1289695A1 |
| Машина ударного действия | 1990 |
|
SU1791108A1 |
| ПРИВОД ВРАЩАТЕЛЬНО-УДАРНОГО ДЕЙСТВИЯ | 2005 |
|
RU2285104C1 |
| Машина ударного действия | 1988 |
|
SU1612075A1 |
| Копер для ударных испытаний | 1975 |
|
SU742737A2 |
| Машина ударного действия | 1990 |
|
SU1819758A1 |
| Зубчатая передача Стихановского | 1988 |
|
SU1576748A1 |
| Устройство ударного действия | 1989 |
|
SU1745538A1 |
| Машина ударного действия | 1989 |
|
SU1691518A1 |



Использование: машиностроение. Сущность изобретения: поворотно-ударный механизм содержит корпус, размещенный в нем двигатель, боек с ударным торцем, поворотный узел с приводным элементом, установленным с возможностью взаимодействия с ударным торцем бойка, держатель рабочего органа. Корпус выполнен с винтовыми пазами. Поворотный узел включает буксу с зубьями, расположенную по направляющим между корпусом и держателем рабочего органа. Приводной элемент выполнен из трех частей, одна часть - с выступами, расположенными в винтовых пазах корпуса, боковые поверхности второй части и держателя рабочего органа охвачены соответствующими пружинами, одни торцы которых оперты на корпус, а другие - соответственно на приводной элемент и буксу, третья часть - с коническими зубьями, сопряженными с зубьями буксы. Даны еще три варианта выполнения поворотно-ударного механизма. 4 с.п. и 1 з.п. ф-лы, 9 ил.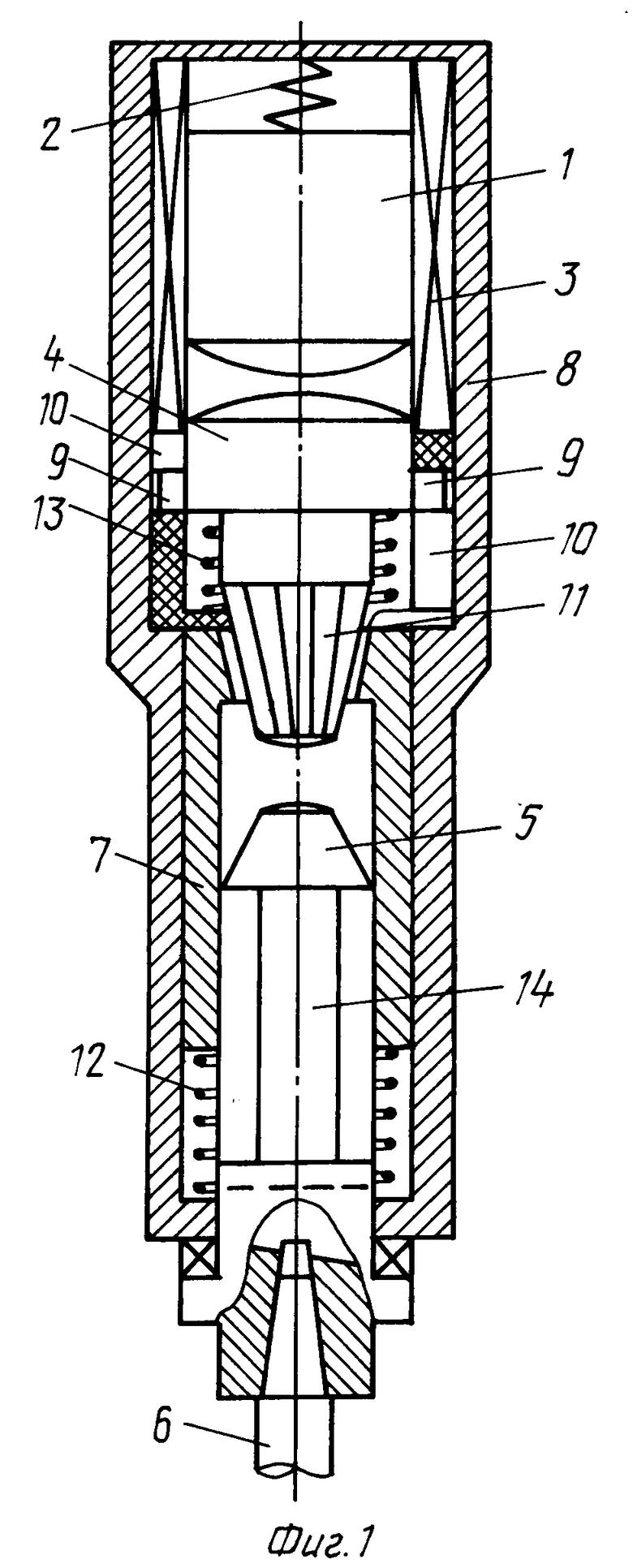
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1289695, кл | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU, патент, 2020054, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Ряшенцев Н.П., Тронов А.П | |||
| Исследование зубчатой поворотной приставки к машине ударного действия.// Известия ТПИ, т | |||
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |
| - Томск, 1963, с | |||
| Ударно-долбежная врубовая машина | 1921 |
|
SU115A1 |
