Изобретение относится к измерительной технике, в частности, к устройствам для измерения оптико-электронными средствами положения механизмов.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому устройству является оптико-электронное устройство для измерения положения механизма, содержащее основание, установленные на нем источник питания, источник излучения и формирующую систему, дополнительную формирующую систему, объектив, устанавливаемый в отраженном от объекта световом потоке, компаратор, регистрирующее устройство, два оптических приемника, последовательно включенные с первым из них усилитель и сумматор.
Недостатком известного оптико-электронного устройства для измерения положения механизма является невысокая точность результатов измерения вследствие того, что механизм с установленной на нем измерительной системой совершает пространственные угловые перемещения, а поверхность объекта, до которого измеряется расстояние, имеет кривизну.
Целью изобретения является повышение точности измерения положения механизма.
Цель достигается тем, что известное оптико-электронное устройство для измерения положения механизма, содержащее основание, установленные на нем источник питания, источник излучения и формирующую систему, дополнительную формирующую систему, объектив, устанавливаемый в отраженном от объекта световом потоке, компаратор, регистрирующее устройство, два оптических приемника, последовательно включенные с первым из них усилитель и сумматор, снабжено установленными на основании пространственным модулятором света, образующим с источником излучения и формирующей системой передающую оптическую систему, пространственно-временным модулятором света, Фурье-преобразователем и бинарным фильтром пространственной частоты, установленными последовательно по ходу светового пучка между объективом и оптическими приемниками и образующими с ними приемную оптическую систему, дополнительным источником излучения и установленным по ходу его светового пучка поворотным зеркалом, установленным перед объективом и оптически связанным с дополнительным источником излучения через дополнительную формирующую систему, усилителем-формирователем, аналоговым ключом, датчиком ускорений, формирователем стробирующего импульса, основной и дополнительной линиями задержки, одновибратором и дополнительным формирователем импульса, выход датчика ускорений соединен с входом формирователя стробирующего импульса, выход которого параллельно соединен с входами основной и дополнительной линий задержки, выход основной линии задержки последовательно соединен с одновибратором и управляющим входом аналогового ключа, выход дополнительной линии задержки соединен с входом дополнительного формирователя импульса, выход которого подключен к электрическому входу пространственно-временного модулятора света, оптические приемники выполнены позиционно-чувствительными, первый из них предназначен для определения координаты центра пятна, второй для определения размера пятна и соединен с входом компаратора, выход которого соединен со входом усилителя-формирователя, выход которого соединен со вторым входом сумматора, выход сумматора соединен с входом аналогового ключа, выход его со входом регистрирующего устройства, дополнительный источник излучения оптически связан с оптическими приемниками через дополнительную формирующую систему, поворотное зеркало, объектив, пространственно-временной модулятор света, Фурье-преобразователь и бинарный фильтр пространственной частоты, а ось чувствительности датчика ускорений параллельна оптической оси объектива.
На чертеже изображена схема оптико-электронного устройства для измерения положения механизма.
Оптико-электронное устройство для измерения положения механизма содержит основание 1, установленные на нем источник 2 питания, источник 3 излучения и формирующую систему 4, дополнительную формирующую систему 5, объектив 6, устанавливаемый в отраженном от объекта световом потоке, компаратор 7, регистрирующее устройство 8, два оптических приемника 9, 10, последовательно включенные с первым из них усилитель 11 и сумматор 12. На основании 1 установлены также пространственный модулятор 13 света, образующий с источником 3 излучения и формирующей системой 4 передающую оптическую систему. Пространственно-временной модулятор 14 света, Фурье-преобразователь 15 и бинарный фильтр 16 пространственной частоты установлены на основании последовательно по ходу светового пучка между объективом 6 и оптическими приемниками 9, 10, образуя с ними приемную оптическую систему. Также оптико-электронное устройство содержит дополнительный источник 17 излучения и установленное по ходу его светового пучка поворотное зеркало 18. Оно установлено перед объективом 6 и оптически связано с дополнительным источником 17 излучения через дополнительную формирующую систему 5. Устройство содержит усилитель-формирователь 19, аналоговый ключ 20, датчик 21 ускорений, формирователь 22 стробирующего импульса, основную 23 и дополнительную 24 линии задержки, одновибратор 25 и дополнительный формирователь 26 импульса. Выход датчика ускорений 21 соединен со входом формирователя 22 стробирующего импульса, выход которого параллельно соединен со входами основной 23 и дополнительной 24 линий задержки, выход основной линии 23 задержки последовательно соединен с одновибратором 25 и управляющим входом аналогового ключа 20, выход дополнительной линии 24 задержки соединен со входом дополнительного формирователя 26 импульса, выход которого подключен к электрическому входу пространственно-временного модулятора 14 света. Оптические приемники 9, 10 выполнены позиционно-чувствительными. Первый приемник 9 предназначен для определения координаты центра пятна, второй 10 - для определения размера пятна и соединен с входом компаратора 7, выход которого соединен с входом усилителя-формирователя 19, выход которого соединен со вторым входом сумматора 12, выход сумматора 12 соединен с входом аналогового ключа 20, выход его со входом регистрирующего устройства 8. Дополнительный источник 17 излучения оптически связан с оптическими приемниками 9,10 через дополнительную формирующую систему 5, поворотное зеркало 18, объектив 6, пространственно-временной модулятор 14 света, Фурье-преобразователь 15 и бинарный фильтр 16 пространственной частоты, а ось чувствительности датчика 21 ускорений параллельна оптической оси объектива 6. От источника питания 2 осуществляется необходимое питание элементов устройства.
Оптико-электронное устройство для измерения положения механизма относительно объекта (звена исполнительной системы) работает следующим образом. Пучок монохроматического светового излучения от источника 3 направляется в формирующую систему 4, на выходе которой формируется параллельный пучок заданного диаметра, направляемый на пространственный модулятор 13 света. Пучок монохроматического светового излучения пространственно модулируется по интенсивности в соответствии с законом Sin по оси X и направляется на поверхность объекта, расстояние до которого измеряется. Изображение светового пучка на объекте формируется объективом 6 на фоточуствительной среде пространственно-временного модулятора 14 и регистрируется. В момент регистрации на пространственно-временной модулятор света поступает импульс с дополнительного формирователя 26 импульсов, длительность которого равна t/2 (половине длительности t стробирующего импульса). При этом импульс задержан дополнительной линией 24 задержки на время t относительно стробирующего импульса.
Пространственные угловые перемещения (имеющие периодический характер) механизма, на котором установлено оптико-электронное устройство для измерения положения механизма, а также кривизна поверхности объекта, расстояние до которого измеряется, приводят к тому, что период отраженного пространственно-модулированного излучения, зарегистрированного пространственно-временным модулятором 14 света, не будет оставаться постоянным по всей чувствительной поверхности модулятора 14. При считывании изображения световое когерентное излучение от источника 17 преобразуется в плоско-параллельный пучок после дополнительной формирующей системы 5, зеркала 18 и объектива 6.
Плоско-параллельный пучок проходит через пространственно-временной модулятор 14 света, дифрагирует на пространственной зарядовой структуре пространственно-временного модулятора 14 света и попадает на вход Фурье-преобразователя 15. Зарядовая структура в свою очередь формируется изображением пространственно-промодулированного излучения, отраженного от объекта, расстояние до которого определяется. В Фурье-плоскости преобразователя 15 формируются световые дифракционные пятна 0, +1, -1 порядков.
Бинарный фильтр 16 пространственной частоты выделяет дифракционные пучки +1 и -1 порядка, местоположение которых относительно оптической оси Фурье-преобразователя характеризует расстояние до объекта.
Световое дифракционное пятно +1 порядка попадает на позиционно-чувствительный приемник 9. Смещение дифракционного пятна +1 порядка относительно оптической оси пропорционально расстоянию до объекта.
Электрический сигнал, пропорциональный смещению светового пятна, с приемника 9 поступает на вход усилителя 11, а с его выхода на вход сумматора 12. Световое дифракционное пятно -1 порядка преобразуется оптическим приемником 10, компаратором 7, усилителем-формирователем 19 в сигнал, пропорциональный ширине дифракционного максимума, которая характеризует угловые перемещения механизма, на котором установлено устройство для измерения расстояния до объекта, а также кривизну поверхности объекта.
В сумматоре 12 происходит вычитание сигнала ошибки оптического приемника 10 из сигнала оптического приемника 9. Таким образом, на выходе сумматора 12 имеет место сигнал, пропорциональный расстоянию между механизмом и объектом с учетом кривизны поверхности объекта и пространственных угловых перемещений механизма, несущего на себе измерительное оптико-электронное устройство. С выхода сумматора 12 сигнал поступает на вход аналогового ключа 20.
Момент, в который значение измеренного расстояния поступает на вход регистрирующего устройства 8, определяется за счет введения в устройство измерительного тракта, включающего в себя элементы устройства 21, 22, 23, 25. Информационный сигнал с датчика 21 линейного ускорения поступает на вход формирователя 22 стробирующего импульса, в котором происходит фильтрация низкочастотной составляющей спектральной плотности действующих ускорений (возникающих вследствие пространственных угловых перемещений механизма) и формирование прямоугольного импульса, длительность которого равна длительности t отрицательного полупериода действующего ускорения.
После основной линии 23 задержки, задерживающей импульс на время 3t/2, он поступает на вход одновибратора 25. Длительность импульса, формируемого одновибратором 25, определяется временем, в течение которого необходимо наличие информационного сигнала на регистрирующем устройстве 8. С выхода одновибратора 25 сигнал поступает на управляющий вход аналогового ключа 20, и на входе регистрирующего устройства 8 регистрируется информационный сигнал о расстоянии до объекта.
Момент регистрации соответствует моменту времени, в который механизм имеет минимальное значение амплитуды пространственных угловых перемещений, что позволяет проводить измерение расстояния между механизмом и объектом с повышенной степенью точности.
Таким образом, измерение расстояния между механизмом и объектом происходит на интервале времени, соответствующем нахождению механизма в области минимальных значений амплитуд угловых перемещений.
Оптико-электронное устройство может быть использовано в автоматизированных системах в процессе сихронизации выполнения технологических операций исполнительными звеньями механизмов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ОБЪЕКТОВ | 2004 |
|
RU2263931C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПОЛЯ МИКРООБЪЕКТОВ С ЛУЧЕВЫМ ВОЗДЕЙСТВИЕМ (ВАРИАНТЫ) | 2002 |
|
RU2199729C1 |
| Способ измерения расстояния между отражающими поверхностями объекта | 1989 |
|
SU1793215A1 |
| ЛИДАР БЕЗ ПОДВИЖНЫХ ЧАСТЕЙ | 2017 |
|
RU2690990C2 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛИЗАЦИИ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ЗОНЕ НА ЗАДАННОМ УДАЛЕНИИ ОТ ОПЕРАТОРА | 2007 |
|
RU2343503C2 |
| Способ и устройство для Фурье-анализа жидких светопропускающих сред | 2021 |
|
RU2770415C1 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| СПОСОБ СВЕТОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ВЫСОТЫ ОБЛАЧНЫХ СЛОЕВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2361237C2 |
| Волоконно-оптическое устройство мониторинга трубопроводов | 2016 |
|
RU2637722C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ В НЕКОГЕРЕНТНОМ СВЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2179336C1 |
Изобретение относится к измерительной технике, в частности, к устройствам для измерения оптико-электронными средствами положения механизмов. Техническим результатом использования изобретения является повышение точности измерения положения. Технический результат достигается тем, что в процессе измерения расстояния до объекта минимизируется ошибка измерений, имеющая место вследствие наличия у объекта кривизны и пространственных угловых перемещений механизма, на котором установлено оптико-электронное измерительное устройство. Устройство содержит оптическую передающую систему, приемную систему, включающую в себя объектив 6, пространственно-временной модулятор 14 света, Фурье-преобразователь 15, бинарный фильтр 16 пространственной частоты, позиционно-чувствительные приемники 9, 10, тракт обработки, включающий в себя блоки 7, 11, 12, 19, 20. На аналоговый ключ 20 поступает сигнал из канала, организованного блоками 21, 22, 23, 25, а на пространственно-временной модулятор 14 света поступает сигнал с дополнительного преобразователя 26 импульсов. На регистрирующее устройство 8 поступает сигнал заданной длительности в моменты времени, соответствующие минимальным значениям амплитуды угловых перемещений механизма. 1 ил.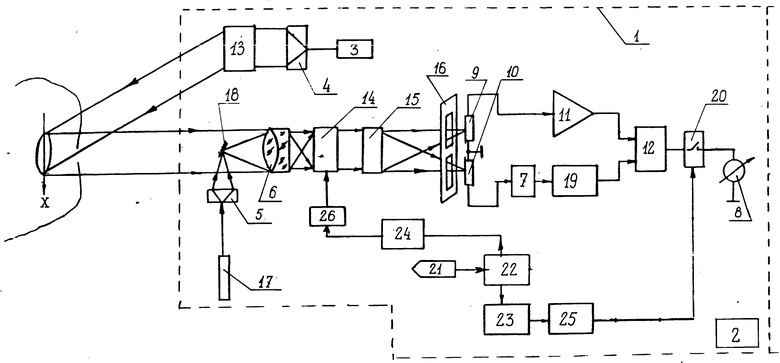
Оптико-электронное устройство для измерения положения механизма, содержащее основание, установленные на нем источник питания, источник излучения и формирующую систему, дополнительную формирующую систему, объектив, устанавливаемый в отраженном от объекта световом потоке, два оптических приемника и последовательно включенные с первым из них усилитель и сумматор, компаратор, регистрирующее устройство, отличающееся тем, что оно снабжено установленными на основании пространственным модулятором света, образующим с источником излучения и формирующей системой передающую оптическую систему, установленными на основании пространственно-временным модулятором света, Фурье-преобразователем и бинарным фильтром пространственной частоты, оптически связанными и установленными последовательно по ходу светового пучка между объективом и оптическими приемниками и образующими с ними приемную оптическую систему, дополнительным источником излучения и установленным по ходу его светового пучка и оптически связанным через дополнительную формирующую систему поворотным зеркалом, расположенным перед объективом и оптически связанным с ним, усилителем-формирователем, аналоговым ключом, датчиком ускорений, формирователем стробирующего импульса, основной и дополнительной линиями задержки, одновибратором и дополнительным формирователем импульса, выход датчика ускорений соединен с входом формирователя стробирующего импульса, выход которого параллельно соединен с входами основной и дополнительной линий задержки, выход основной линии задержки последовательно соединен с одновибратором и управляющим входом аналогового ключа, выход дополнительной линии задержки соединен с входом дополнительного формирователя импульса, выход которого подключен к электрическому входу пространственно-временного модулятора света, оптические приемники выполнены позиционно-чувствительными, первый из них предназначен для определения координаты центра пятна, второй - для определения размера пятна и соединен с входом компаратора, выход которого соединен с входом усилителя-формирователя, выход которого соединен с вторым входом сумматора, выход сумматора соединен с входом аналогового ключа, выход его с входом регистрирующего устройства, дополнительный источник излучения оптически связан с оптическими приемниками через дополнительную формирующую систему, зеркало, объектив, пространственно-временной модулятор света, Фурье-преобразователь и бинарный фильтр пространственной частоты, а ось чувствительности датчика ускорений параллельна оптической оси объекта.
| Фотоэлектрический способ измерения положения объекта и устройство для его осуществления | 1986 |
|
SU1368632A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
