Область техники
Изобретение относится к управлению лазерным излучением без подвижных частей с возможностью управления направлением, интенсивностью, частотой и фазовыми характеристиками светового излучения, и может найти применение в ряде специальных областях, в оптической локации, системах управления робототехническими комплексами, системах помощи водителям автотранспортных средств, системах предупреждения столкновения с препятствиями, картографирования и навигации.
Уровень техники
Известен лидар, содержащий вращающуюся призму, двигатель для вращения призмы, лазерный источник света, передающий и приемный тракты. Недостатком этого устройства является необходимость стабилизации вращающейся призмы, существенные ограничения по угловым скоростям и ускорениям сканирующей системы, недолговечность работы устройств вращения, а также большие массогабаритные параметры и энергопотребление [патент US 20110216304 А1 (High definition lidar system)].
Известен лидар, содержащий массив излучающих лазерных диодов, массив фотоприемных элементов, диаграмма направленности которых формирует поле зрения, систему коммутации, усиления, фильтрации и согласования сигнала, быстродействующую схему аналого-цифрового преобразователя, схему цифровой обработки сигнала, выполненную на программируемой логической интегральной схеме. Недостатком этого лидара является малое угловое разрешение, ограниченное количеством пар «приемник - передатчик», малое быстродействие вследствие использования фазового метода измерения дальности и использования аналого-цифрового преобразователя [патент US 20150219764 A1].
Наиболее близким изобретением является лидар, содержащий передающий оптический тракт, приемный оптический тракт, устройство цифровой обработки сигналов, устройство визуализации, лазерный излучатель, содержащий лазерный источник света, коллиматор, расщепитель света на горизонтальный и вертикальный пучки, каждый из которых оптически соединен с горизонтальным и вертикальным линейными модуляторами соответственно, причем два линейных модулятора света выполнены с взаимно перпендикулярными электродами управления [J. Stockley and S. Serati, ''Cascaded One-Dimensional Liquid Crystal OP As for 2-D Beam Steering,'' IEEE Aerospace Conference, Big Sky, Montana, 2003].
Недостатком такого лидара является низкое быстродействие, низкий КПД модулятора.
Задачей настоящего изобретения является расширение сферы применения, увеличение быстродействия и улучшение качества работы системы в сложной помеховой обстановке.
Сущность изобретения
Эти задачи решаются созданием настоящего изобретения.
Лидар без подвижных частей согласно нашему изобретению содержит лазерный излучатель, горизонтальный линейный модулятор, систему управления горизонтальным линейным модулятором, вертикальный линейный модулятор, систему управления вертикальным линейным модулятором, передающий оптический тракт, направленный на объект наблюдения, приемный оптико-электронный тракт, цифровой вычислитель и потребитель информации, причем горизонтальный модулятор содержит нанесенную на первую диэлектрическую прозрачную подложку прозрачный электропроводящий слой, покрытый прозрачным гелеобразным слоем, и систему n штук линейчатых прозрачных горизонтальных электродов, расположенных в одной плоскости на второй диэлектрической прозрачной подложке, размещенных с зазором над прозрачным гелеобразным слоем и соединенных электрически с системой управления горизонтальным линейным модулятором, при этом n выходов системы управления горизонтальным линейным модулятором, соединены с n входами системы линейчатых прозрачных электродов, при этом система линейчатых прозрачных горизонтальных n электродов покрывает световую апертуру второй диэлектрической прозрачной подложки, при этом все линейчатые прозрачные горизонтальные n электроды электрически изолированы друг от друга, а вертикальный линейный модулятор 4 содержит нанесенный на первую диэлектрическую прозрачную подложку прозрачный электропроводящий слой, покрытый прозрачным гелеобразным слоем, и систему m штук линейчатых прозрачных вертикальных электродов, расположенных в одной плоскости на второй диэлектрической прозрачной подложке, размещенных с зазором над прозрачным гелеобразным слоем и соединенных электрически с вертикальным устройством управления, при этом m выходов вертикального устройства управления соединены с m входами системы линейчатых прозрачных электродов, при этом линейчатые прозрачные вертикальные m электроды покрывают световую апертуру второй диэлектрической прозрачной подложки, при этом все линейчатые прозрачные вертикальные m электроды электрически изолированы друг от друга, причем лазерный излучатель, блок систем управления горизонтальным линейным модулятором, блок систем управления вертикальным линейным модулятором, приемный оптико-электронный тракт и потребитель информации электрически соединены с цифровым вычислителем, причем лазерный излучатель состоит из лазерного источника света, коллиматора, зеркала и расщепителя света на горизонтальный и вертикальный пучки, каждый из которых оптически соединен с горизонтальным линейным модулятором и вертикальным линейным модулятором, причем приемный оптико-электронный тракт состоит из расположенных последовательно на оптической оси объектива приемного тракта, полосового оптического фильтра, фотоприемного элемента, при этом фотоприемный элемент электрически связан с предварительным усилителем, а предварительный усилитель электрически связан с регулятором коэффициента усиления, причем цифровой вычислитель состоит по крайней мере из двух блоков согласования аналоговых сигналов, цифроаналогового преобразователя, время-цифрового преобразователя, центрального процессорного устройства, оперативного запоминающего устройства, постоянного запоминающего устройства, при этом блоки согласования аналоговых сигналов электрически соединены с цифроаналоговым преобразователем и время-цифровым преобразователем, а цифроаналоговый преобразователь и время-цифровой преобразователь электрически соединены с центральным процессорным устройством, при этом центральное процессорное устройство электрически соединено с оперативным запоминающим устройством и постоянным запоминающим устройством, при этом центральное процессорное устройство электрически связано через блок сопряжения с потребителем информации, при этом передающий оптический тракт содержит последовательно расположенные на первой оптической оси горизонтальный линейный модулятор, горизонтальный Фурье-объектив, причем в фокусе горизонтального Фурье-объектива расположен горизонтальный непрозрачный фазовый фильтр и горизонтальный проекционный объектив, а на второй оптической оси, которая параллельна первой оптической оси, последовательно расположены вертикальный линейный модулятор, вертикальный Фурье-объектив, причем в фокусе вертикального Фурье-объектива расположен вертикальный непрозрачный фазовый фильтр и вертикальный проекционный объектив, при этом непрозрачные фазовые фильтры помещены в фокусах горизонтального и вертикального Фурье-объективов соответственно, при этом размеры непрозрачных фазовых фильтров подобраны так, что непрозрачные фазовые фильтры перекрывают световые потоки горизонтального и вертикального лазерных пучков в нулевом порядке соответственно.
Кроме того, лидар без подвижных частей по настоящему изобретению содержит по крайней мере один дополнительный лазерный источник света с длиной волны, отличной от длины волны лазерного источника света, и оптически сопряженное с ним по крайней мере одно дихроичное зеркало, причем дихроичное зеркало расположено на оптической оси между лазерным источником света и коллиматором, при этом дихроичное зеркало прозрачно для лазерного источника света и непрозрачно для дополнительного лазерного источника.
Кроме того, лидар без подвижных частей по настоящему изобретению содержит на оптической оси между лазерным излучателем и горизонтальным линейным модулятором горизонтальный прозрачный параллелепипед полного внутреннего отражения, одной гранью контактирующий оптически с первой диэлектрической прозрачной подложкой так, чтобы на свободной границе прозрачного гелеобразного слоя было обеспечено полное внутреннее отражение, а между лазерным излучателем и вертикальным линейным модулятором расположен вертикальный прозрачный параллелепипед полного внутреннего отражения, одной гранью контактирующий оптически с первой диэлектрической прозрачной подложкой так, чтобы на свободной границе прозрачного гелеобразного слоя было обеспечено полное внутреннее отражение.
Кроме того, лидар без подвижных частей по настоящему изобретению содержит блок формирования кодированного зондирующего сигнала, электрически связанный с лазерным излучателем и цифровым вычислителем.
Кроме того, лидар без подвижных частей по настоящему изобретению содержит дополнительный приемный оптико-электронный тракт, электрически связанный с цифровым вычислителем.
Кроме того, лидар без подвижных частей по настоящему изобретению содержит апертуру системы n штук линейчатых прозрачных электродов, которая разбита на k секторов, причем k≥2, и содержит апертуру системы m штук линейчатых прозрачных электродов, которая разбита на k секторов, причем k≥2, а каждый сектор горизонтального линейного модулятора и соответствующего ему вертикального линейного модулятора совпадают по апертуре, причем введен блок коммутации сигналов управления электродами горизонтального модулятора, управляющий k секторами горизонтального модулятора, и введен блок коммутации сигналов управления электродами вертикального модулятора, управляющий k секторами вертикального модулятора, причем блок коммутации сигналов управления системой n штук линейчатых прозрачных электродов горизонтального модулятора электрически соединен с системой управления горизонтального линейного модулятора и цифровым вычислителем, причем блок коммутации сигналов управления системой m штук линейчатых прозрачных электродов вертикального линейного модулятора электрически соединен с системой управления вертикального линейного модулятора и цифровым вычислителем, а система n штук линейчатых прозрачных электродов в горизонтальном линейном модуляторе и система m штук линейчатых прозрачных электродов в вертикальном линейном модуляторе взаимно перпендикулярны.
Перечень чертежей
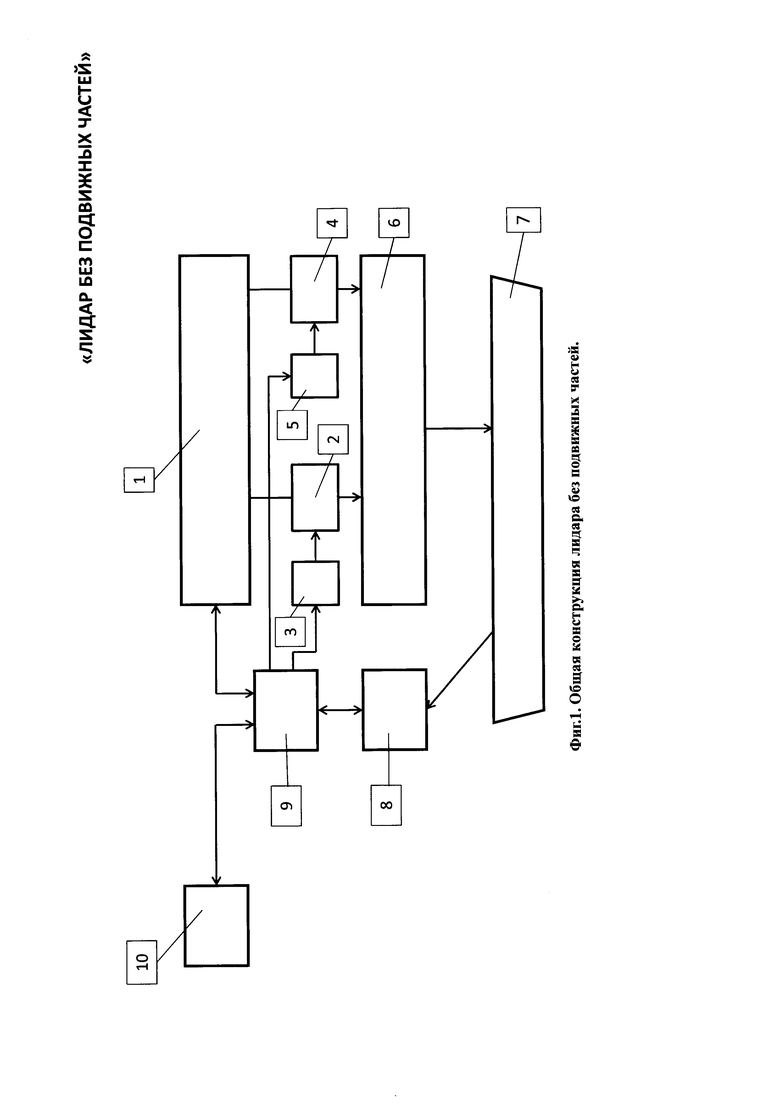
На Фиг. 1 показана общая конструкция лидара без подвижных частей.
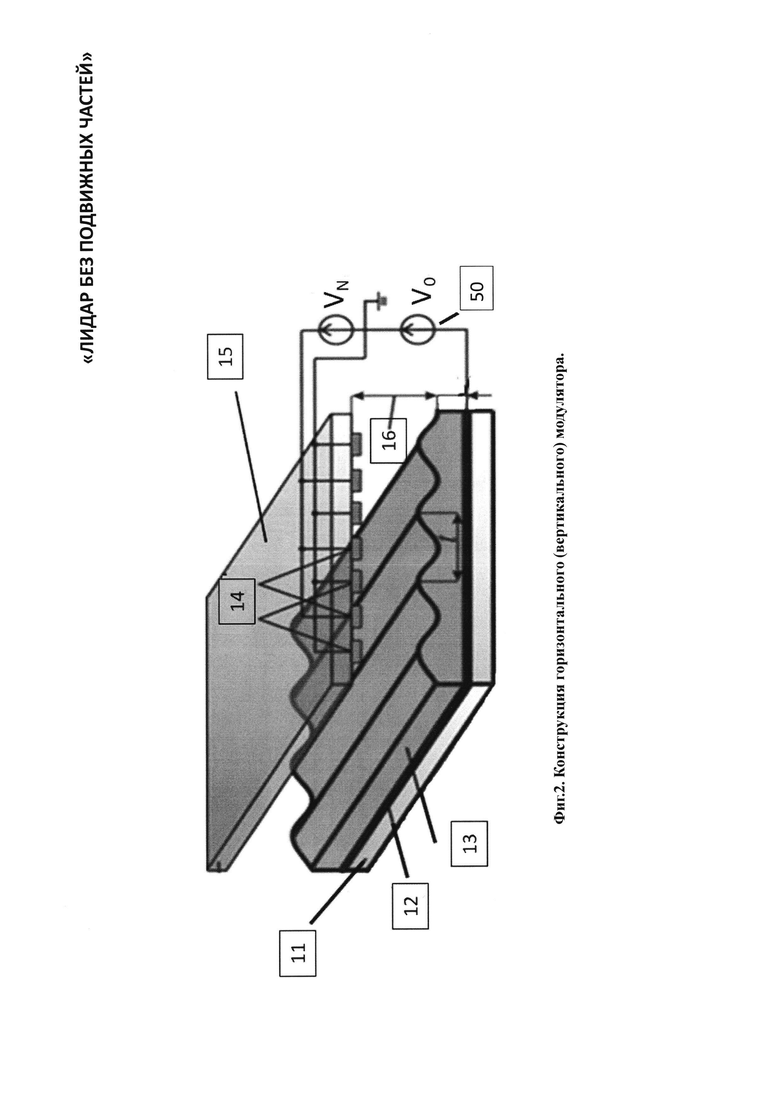
На Фиг. 2 показана конструкция горизонтального (вертикального) модулятора.
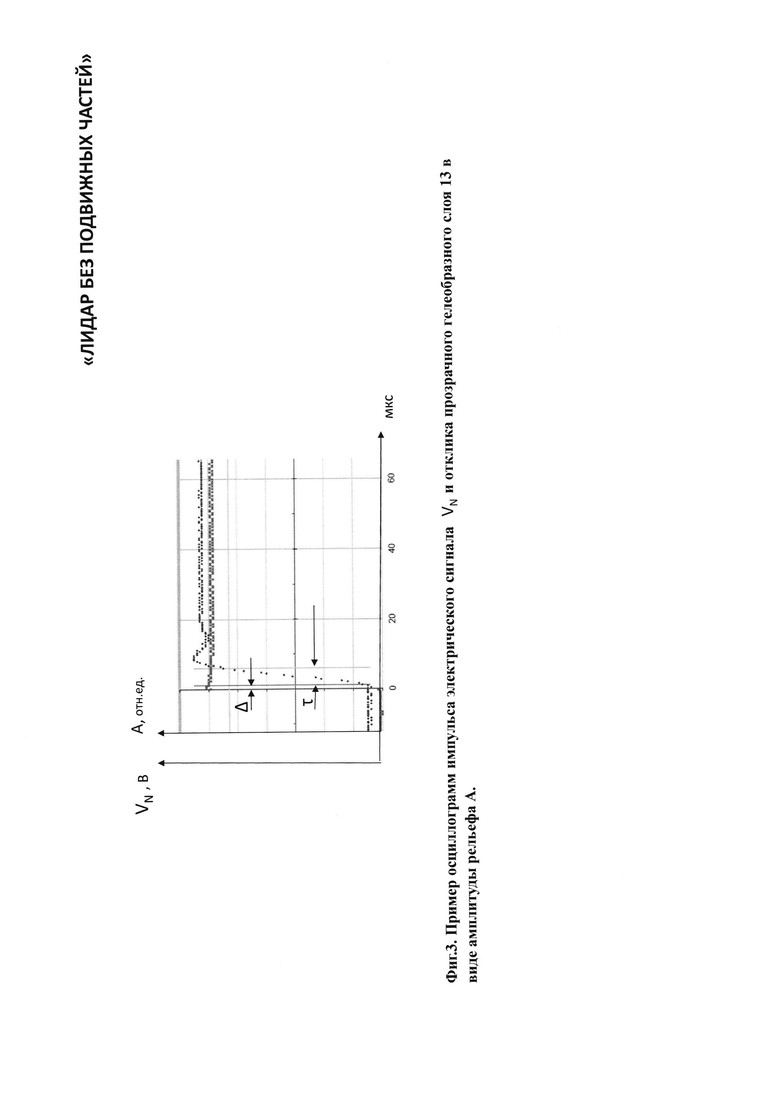
На Фиг. 3 показан пример осциллограмм импульса электрического сигнала VN и отклика прозрачного гелеобразного слоя 13 в виде амплитуды рельефа А. (Зазор 16 равен двум микрометрам, задержка реакции Δ=1,2 мкс, время отклика прозрачного гелеобразного слоя τ=8,4 мкс.)
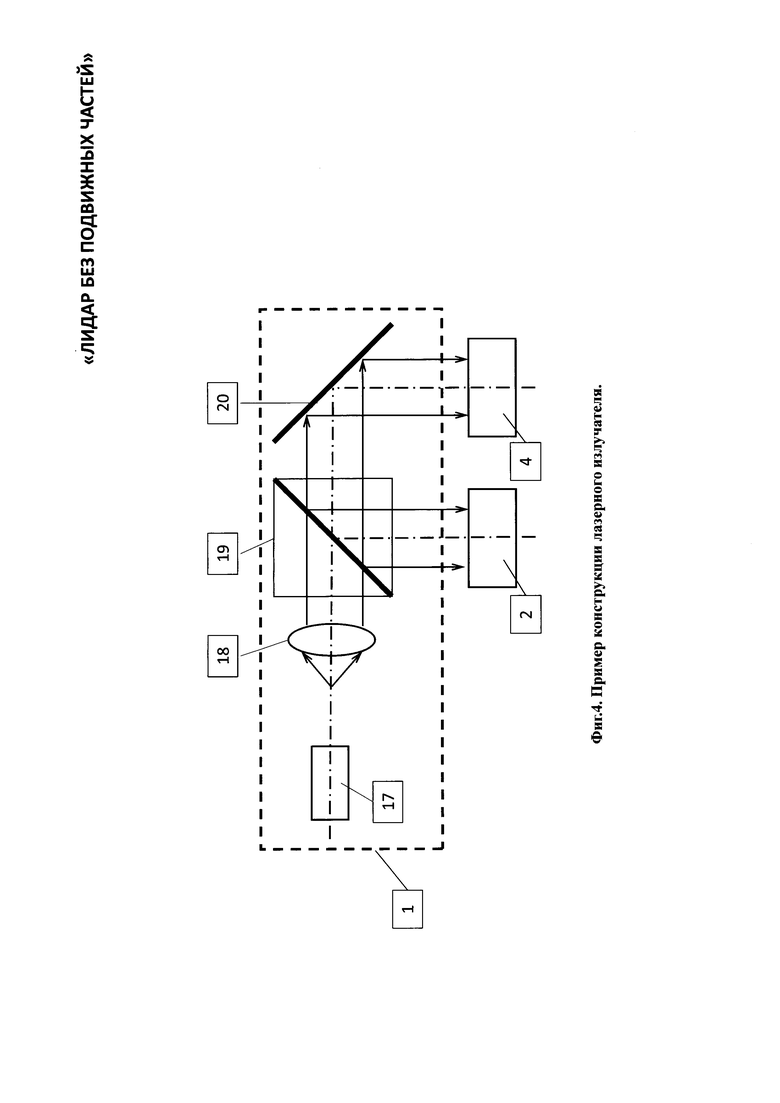
На Фиг. 4 показан пример конструкции лазерного излучателя.
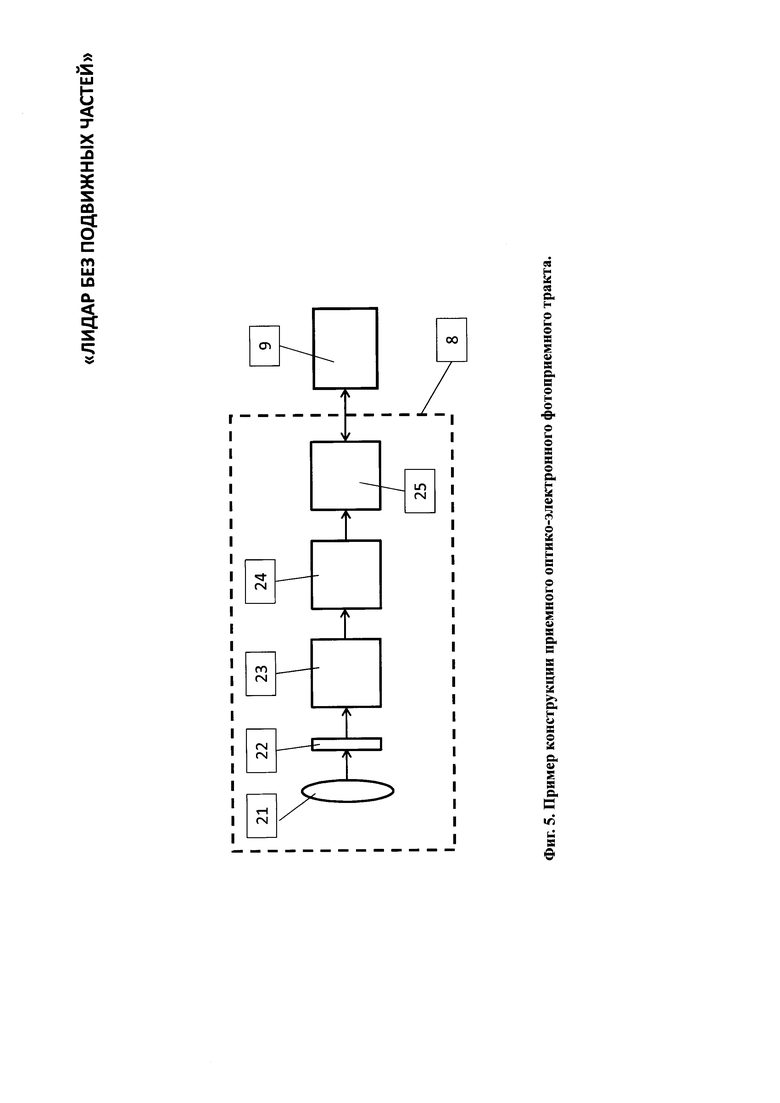
На Фиг. 5 показан пример конструкции приемного оптико-электронного фотоприемного тракта.
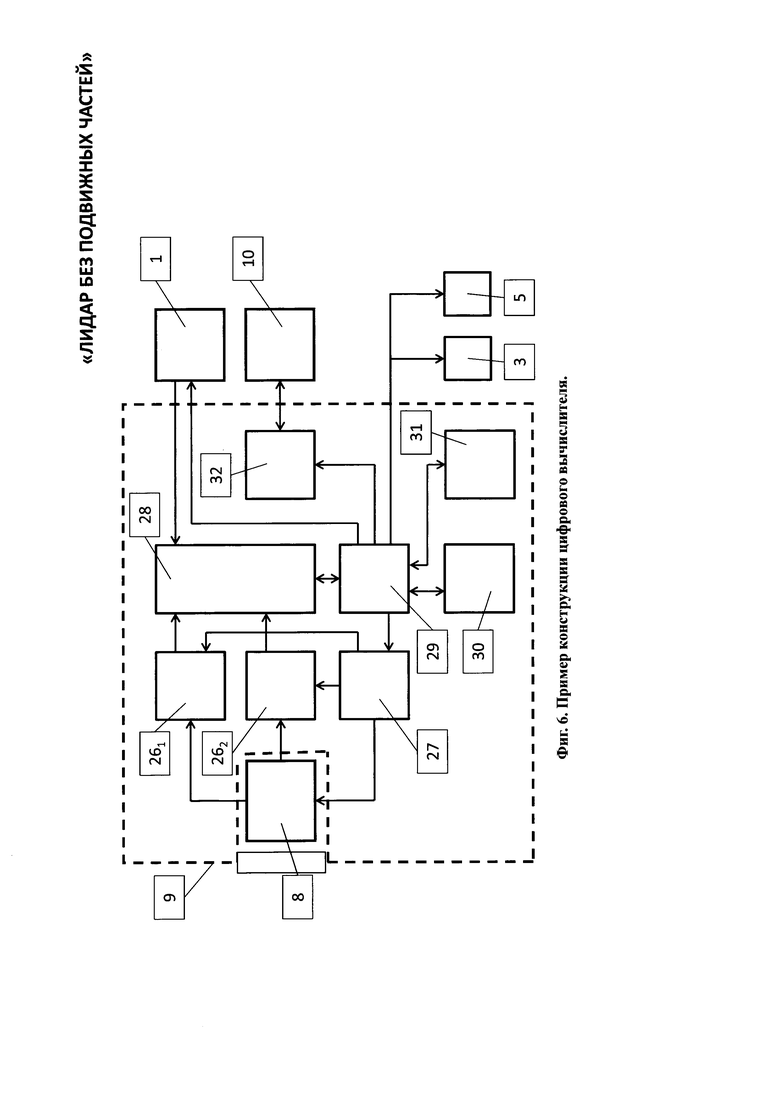
На Фиг. 6 показан пример конструкции цифрового вычислителя.
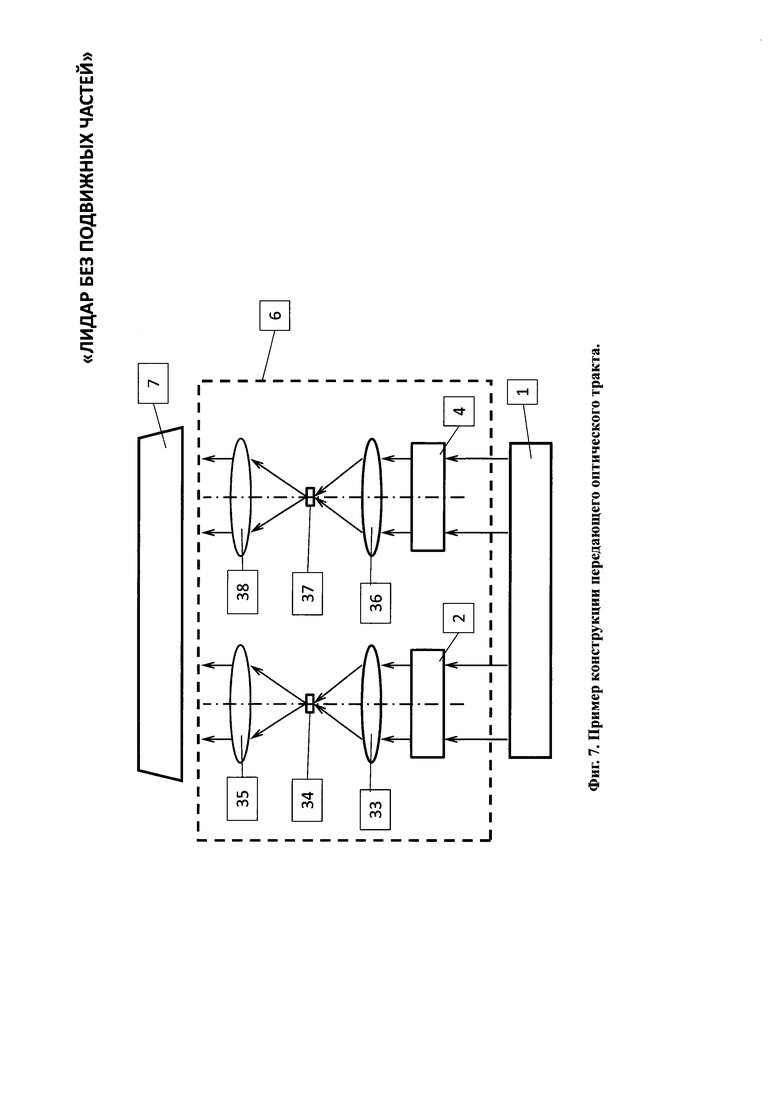
На Фиг. 7 показан пример конструкции передающего оптического тракта.
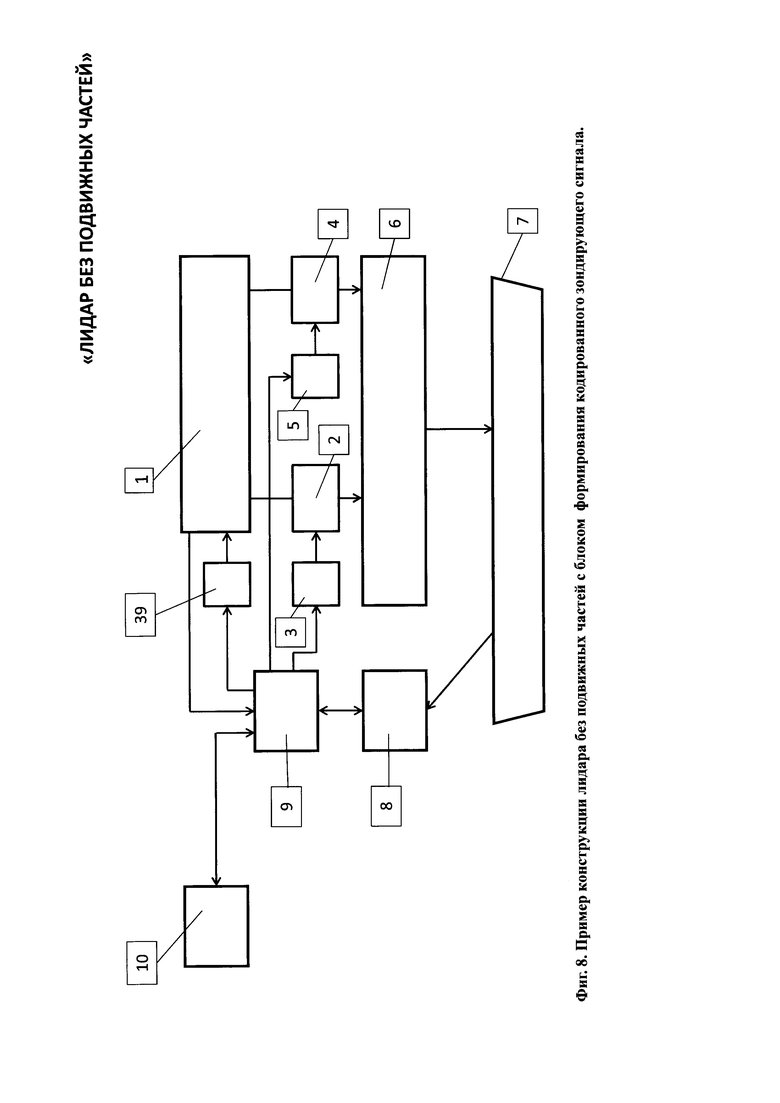
На Фиг. 8 показан пример конструкции лидара без подвижных частей с блоком формирования кодированного зондирующего сигнала.
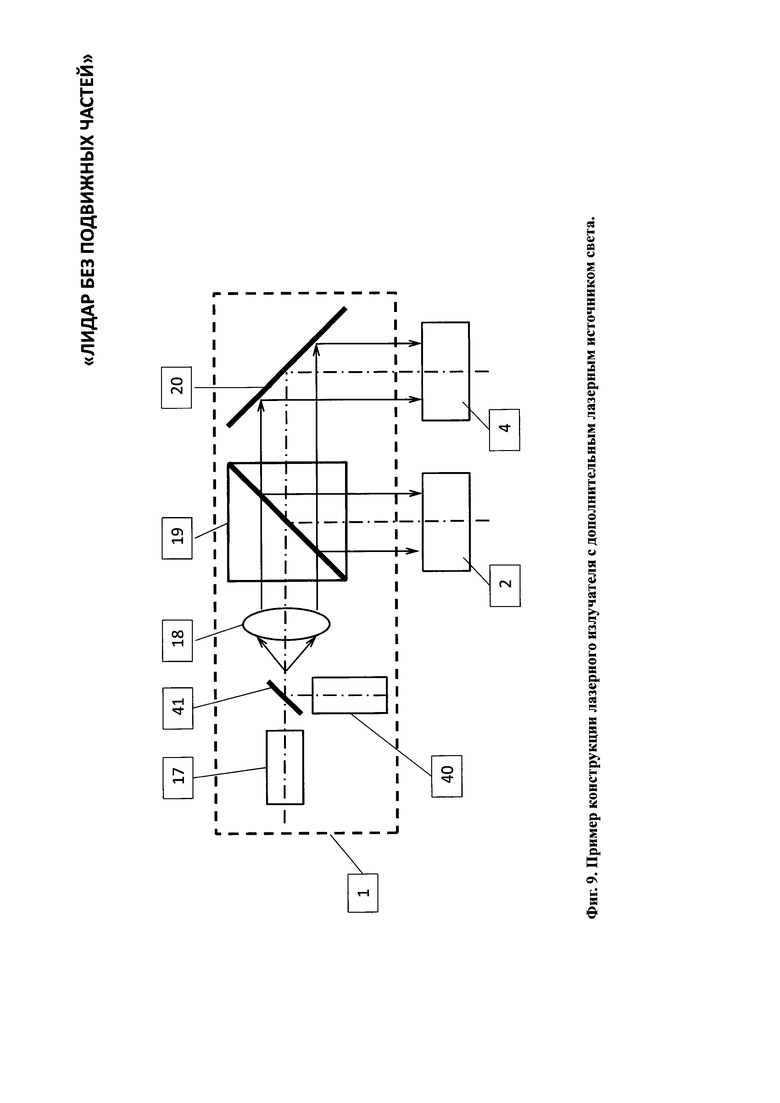
На Фиг. 9 показан пример конструкции лазерного излучателя с дополнительным лазерным источником света.
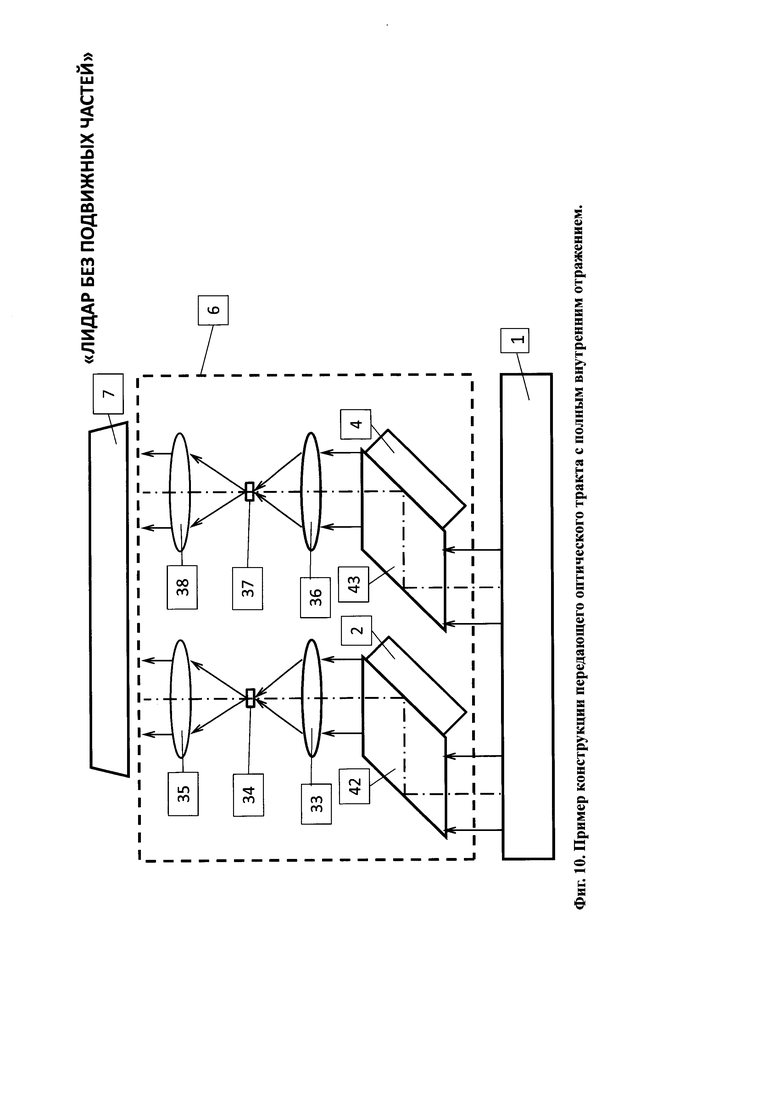
На Фиг. 10 показан пример конструкции передающего оптического тракта с полным внутренним отражением.
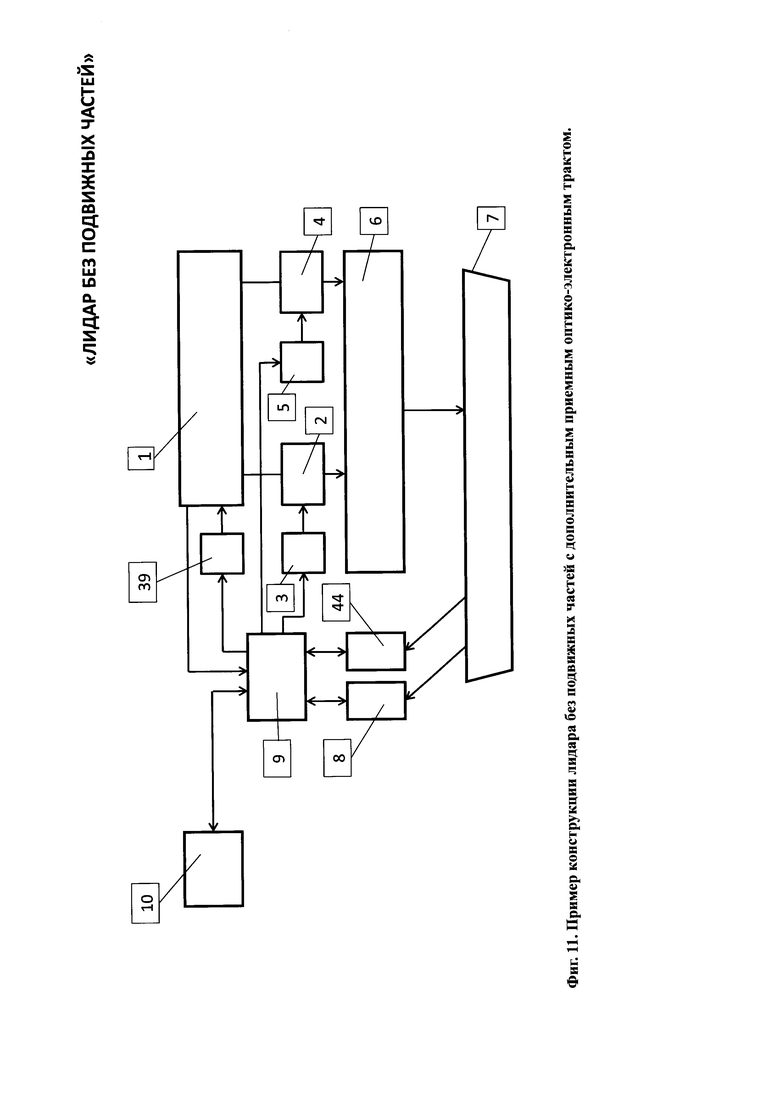
На Фиг. 11 показан пример конструкции лидара без подвижных частей с дополнительным приемным оптико-электронным трактом.
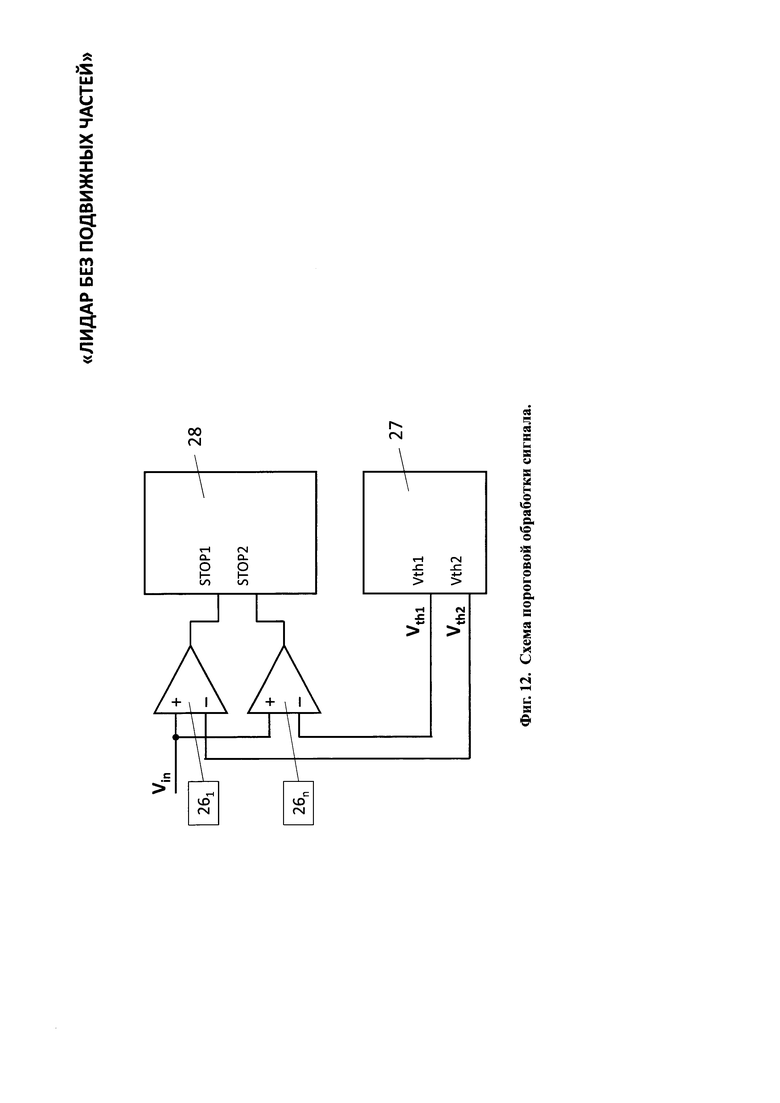
На Фиг. 12 показана схема пороговой обработки сигнала.
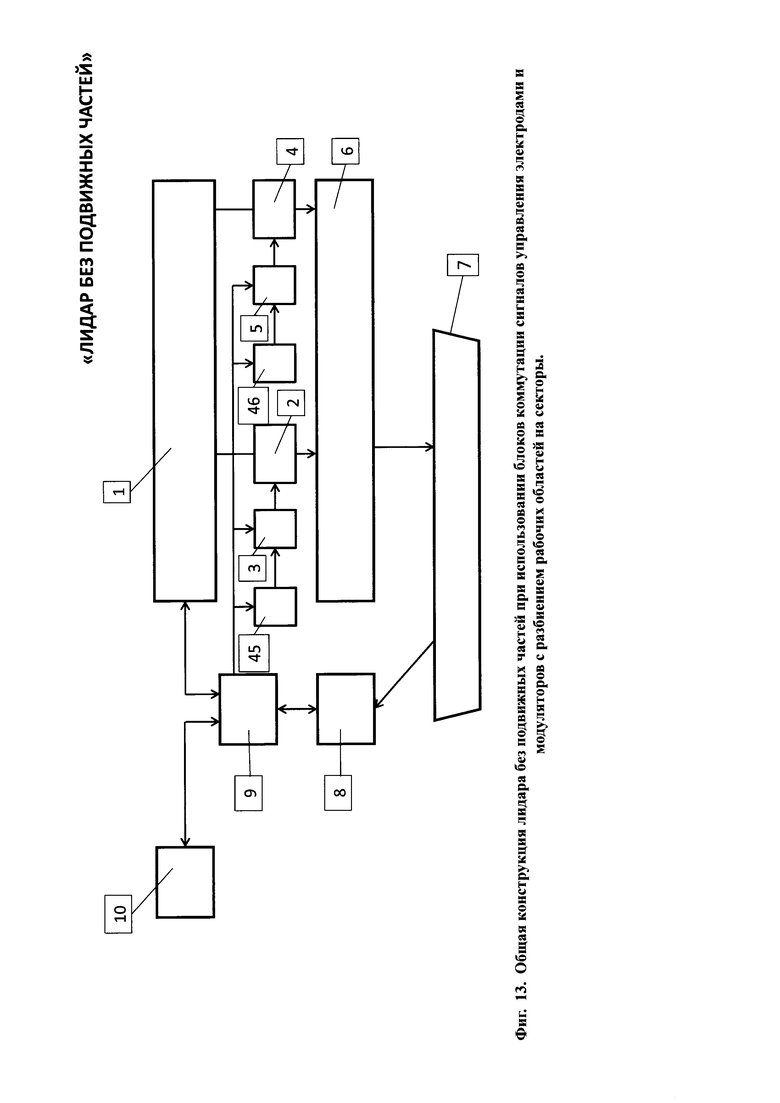
На Фиг. 13 показана общая конструкция лидара без подвижных частей при использовании блоков коммутации сигналов управления электродами и модуляторов с разбиением рабочих областей на секторы.
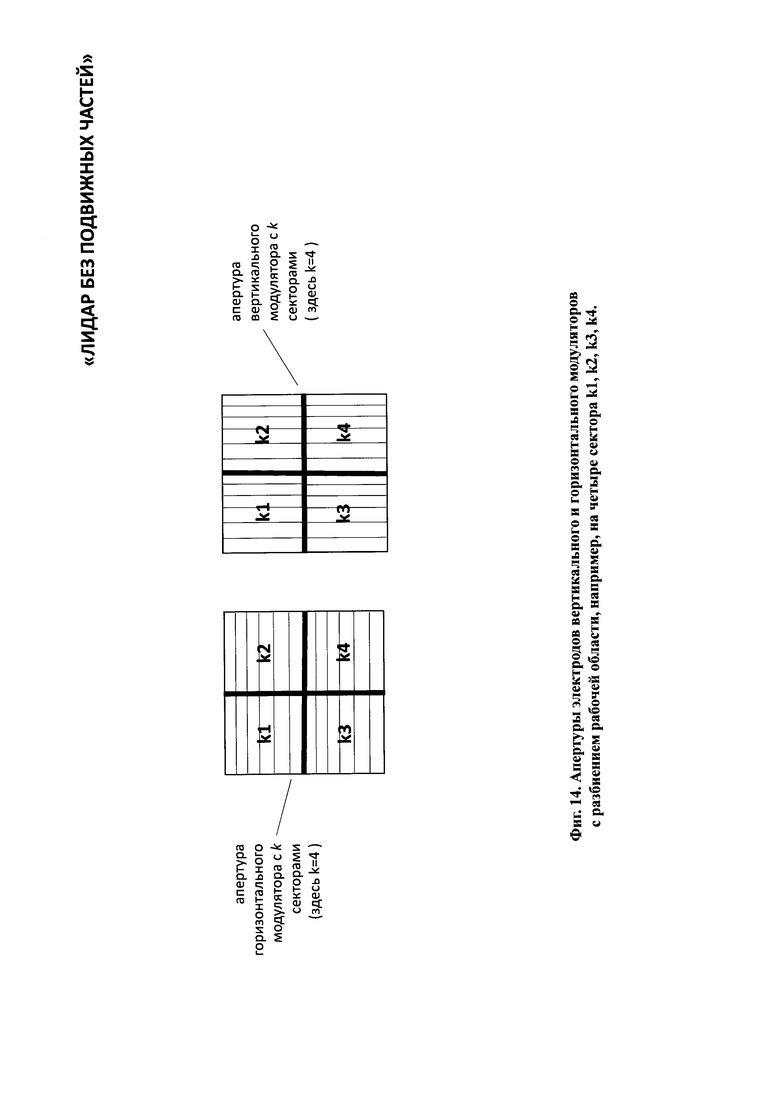
На Фиг. 14 показаны апертуры электродов вертикального и горизонтального модуляторов с разбиением рабочей области, например, на четыре сектора k1, k2, k3, k4.
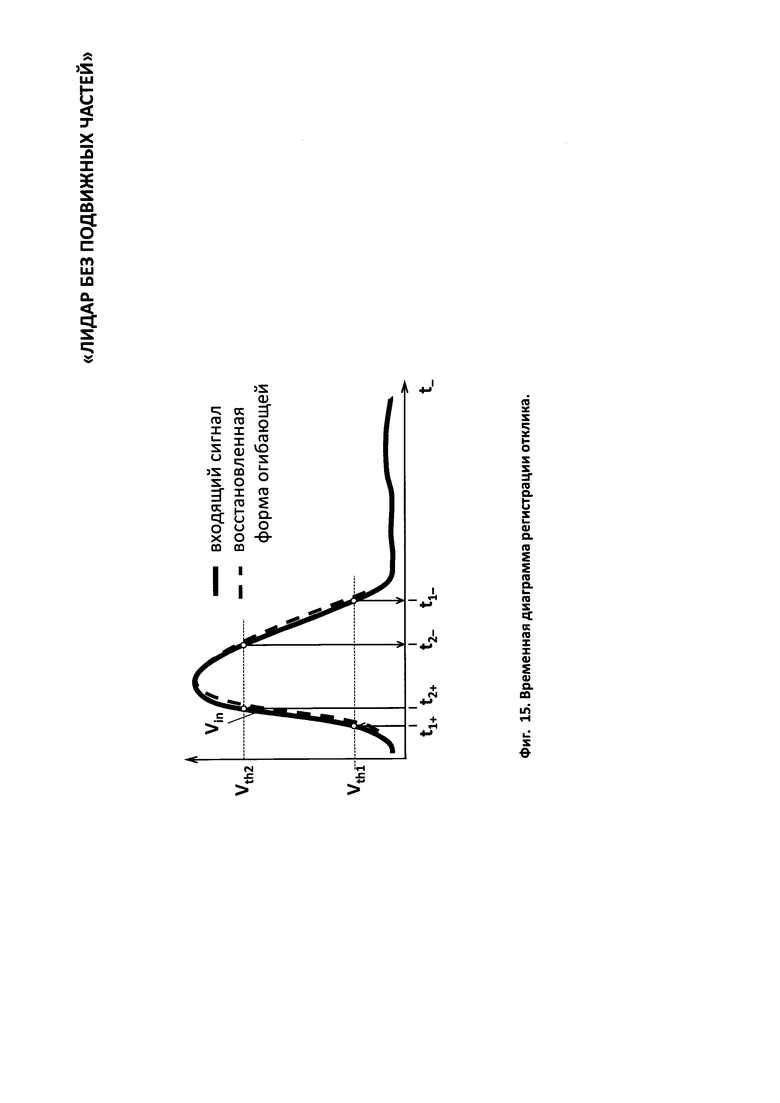
На Фиг. 15 показана временная диаграмма регистрации отклика.
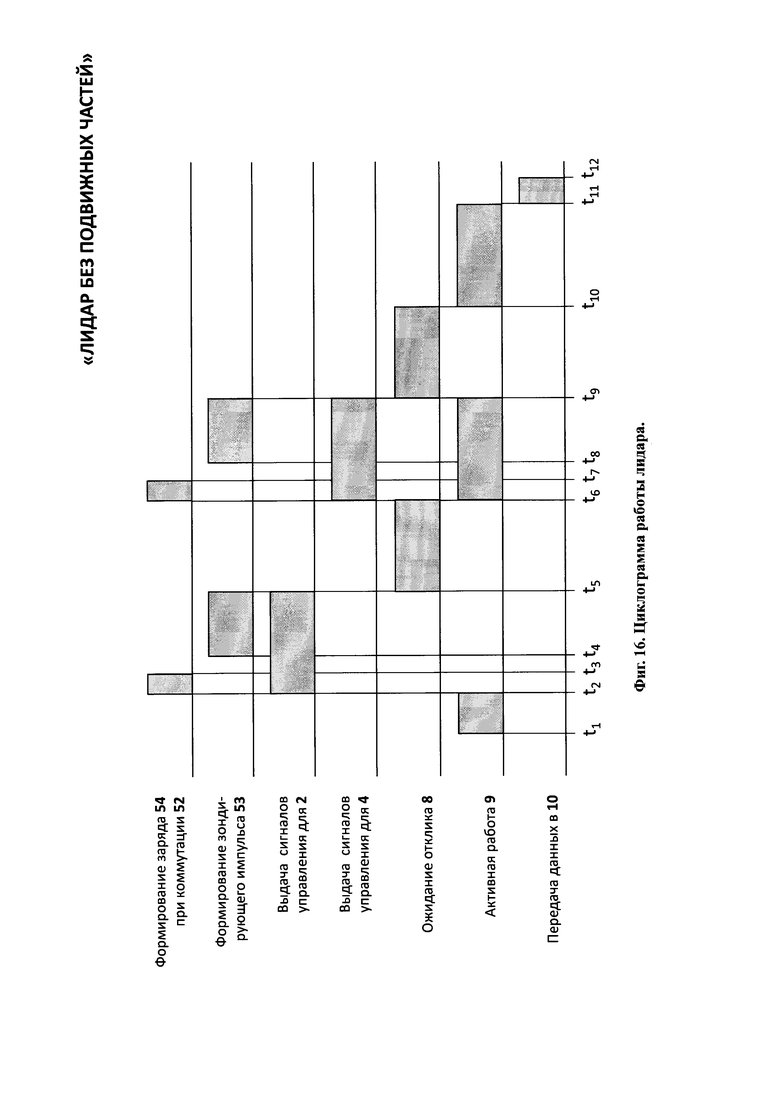
На Фиг. 16 показана циклограмма работы лидара.
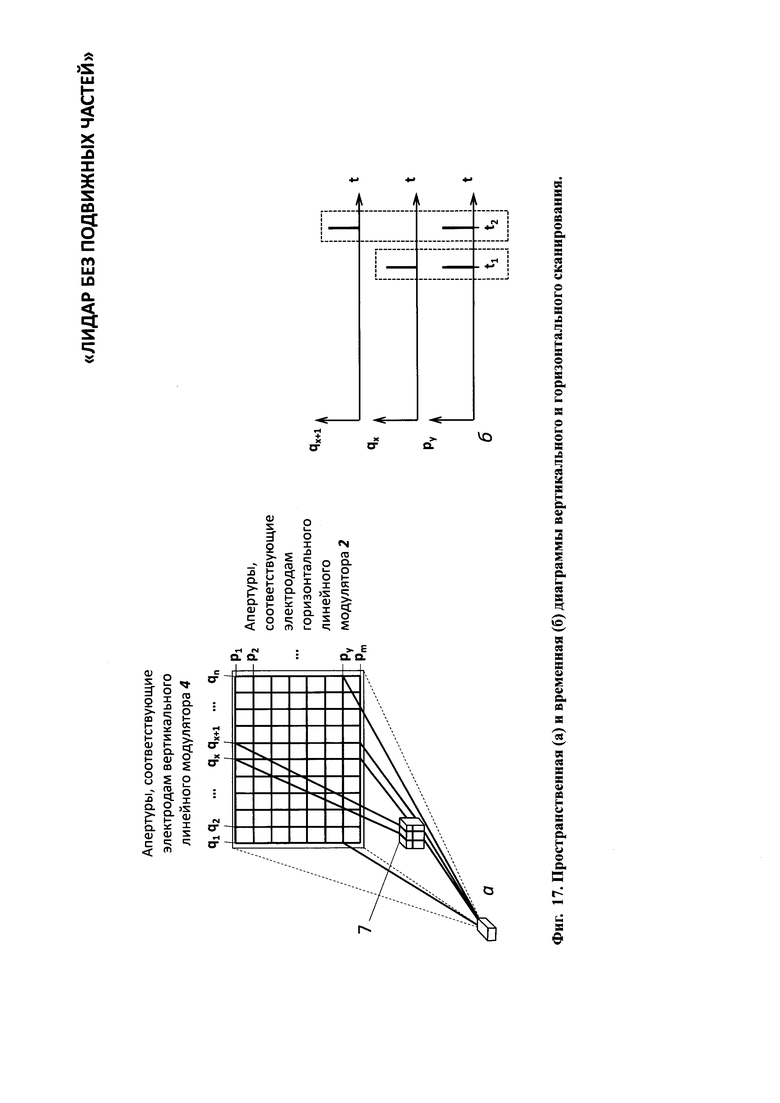
На Фиг. 17 показана пространственная (а) и временная (б) диаграммы вертикального и горизонтального сканирования.
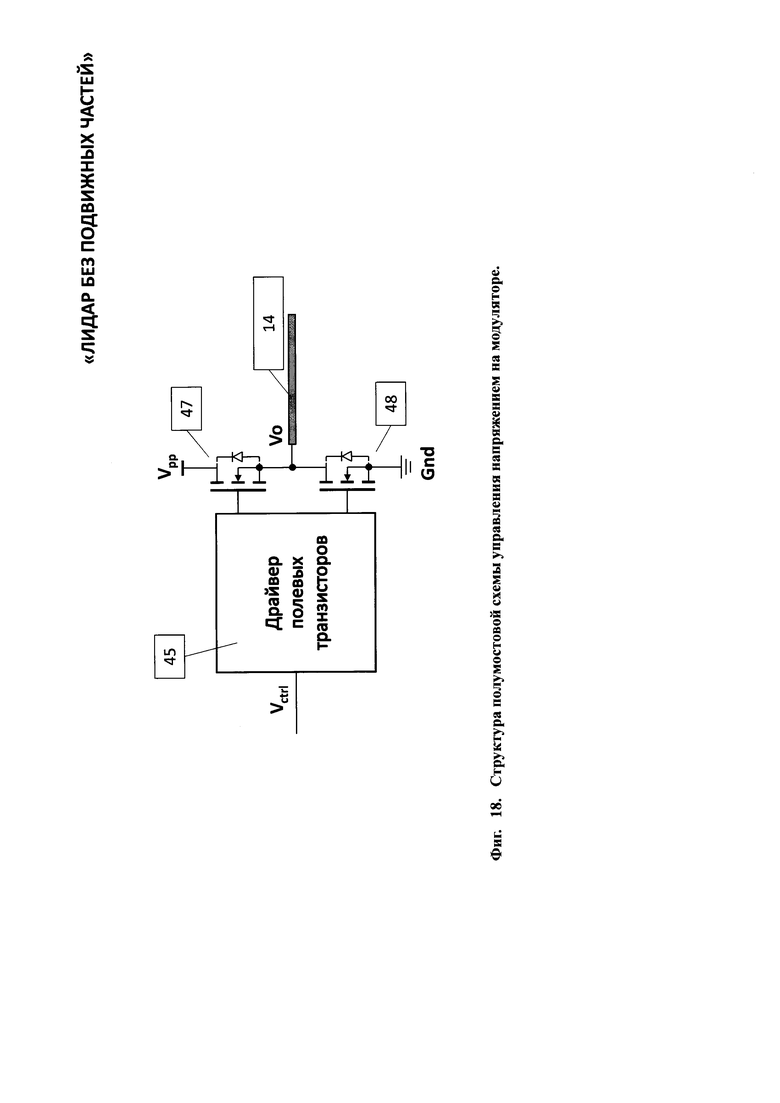
На Фиг. 18 показана структура полумостовой схемы управления напряжением на модуляторе.
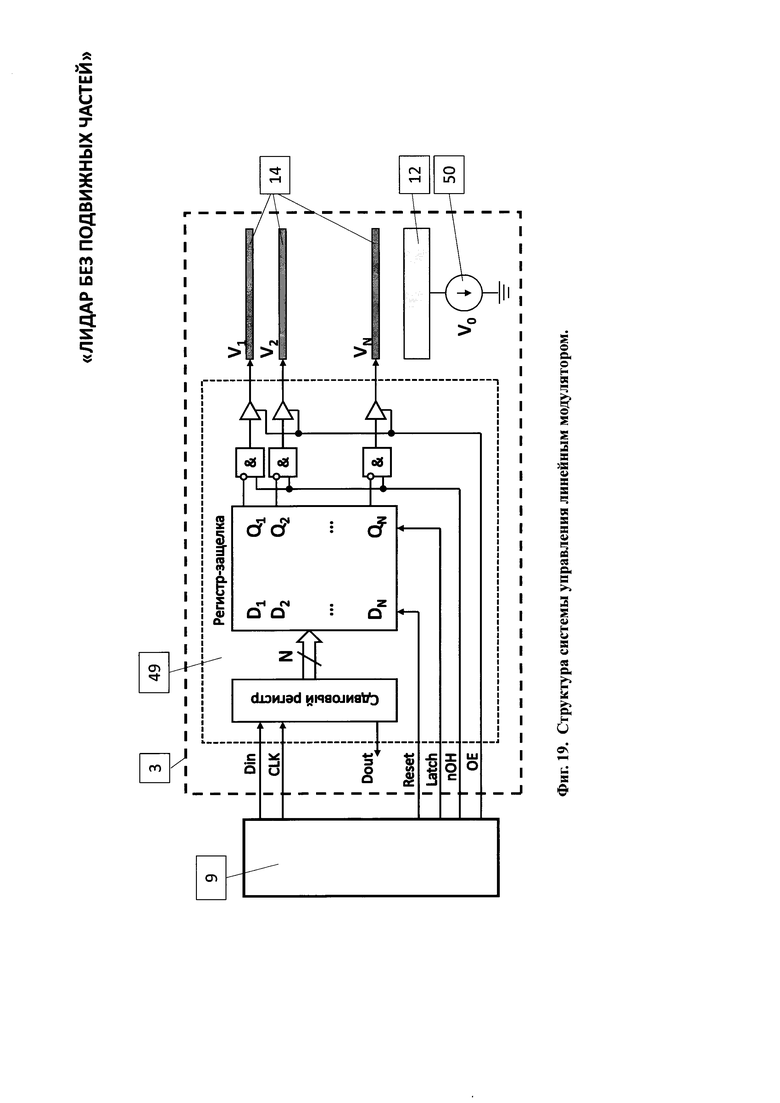
На Фиг. 19 показана структура системы управления линейным модулятором.
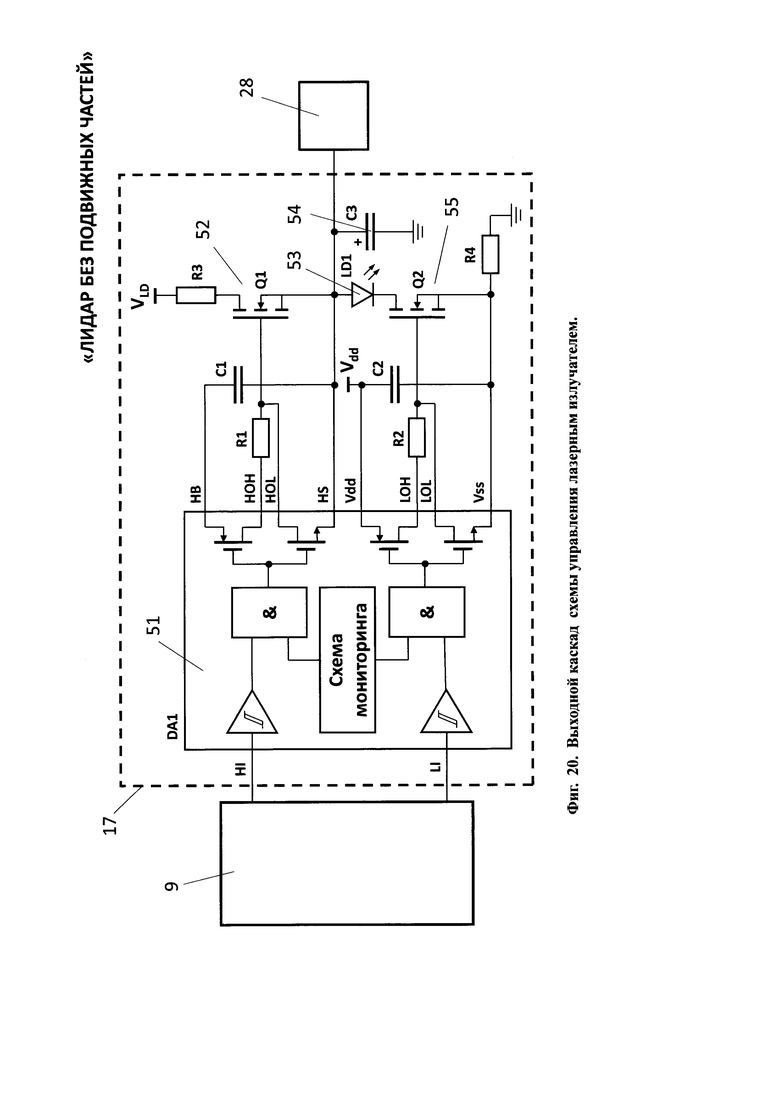
На Фиг. 20 показан выходной каскад схемы управления лазерным излучателем.
Сведения, подтверждающие возможность осуществления изобретения
Лидар без подвижных частей (Фиг. 1-7) содержит лазерный излучатель 1, горизонтальный линейный модулятор 2, систему управления 3 горизонтальным линейным модулятором 2, вертикальный линейный модулятор 4, систему управления 5 вертикальным линейным модулятором 4, передающий оптический тракт 6, направленный на объект наблюдения 7, приемный оптико-электронный тракт 8, цифровой вычислитель 9 и потребитель информации 10, причем горизонтальный модулятор 2 содержит нанесенный на первую диэлектрическую прозрачную подложку 11 прозрачный электропроводящий слой 12, покрытый прозрачным гелеобразным слоем 13, и систему n штук линейчатых прозрачных электродов 14, расположенных в одной плоскости на второй диэлектрической прозрачной подложке 15, размещенных с зазором 16 над прозрачным гелеобразным слоем 13 и соединенных электрически с системой управления 3 горизонтальным линейным модулятором 2, при этом n выходов системы управления 3 горизонтальным линейным модулятором 2 соединены с n входами системы n штук линейчатых прозрачных электродов 14, при этом система линейчатых прозрачных n электродов покрывает световую апертуру второй диэлектрической прозрачной подложки 15, при этом все линейчатые прозрачные n электроды электрически изолированы друг от друга, а вертикальный линейный модулятор 4 содержит нанесенную на первую диэлектрическую прозрачную подложку 11 прозрачный электропроводящий слой 12, покрытый прозрачным гелеобразным слоем 13, и систему m штук линейчатых прозрачных электродов 14, расположенных в одной плоскости на второй диэлектрической прозрачной подложке 15, размещенных с зазором 16 над прозрачным гелеобразным слоем 13 и соединенных электрически с системой управления 5 вертикальным линейным модулятором 4, при этом m выходов системы управления 5 соединены с m входами системы линейчатых прозрачных электродов 14, при этом линейчатые прозрачные вертикальные m электроды покрывают световую апертуру второй диэлектрической прозрачной подложки 15, при этом все линейчатые прозрачные вертикальные m электроды электрически изолированы друг от друга, причем лазерный излучатель 1, система управления 3 горизонтальным линейным модулятором 2, система управления 5 вертикальным линейным модулятором 4, приемный оптико-электронный тракт 8 и потребитель информации 10 электрически соединены с цифровым вычислителем 9, причем лазерный излучатель 1 состоит из лазерного источника света 17, коллимматора 18, зеркала 20 и расщепителя света 19 на горизонтальный и вертикальный пучки, каждый из которых оптически соединен с горизонтальным линейным модулятором 2 и вертикальным линейным модулятором 4, причем приемный оптико-электронный тракт 8 состоит из расположенных последовательно на оптической оси объектива 21 приемного оптико-электронного тракта 8 полосового оптического фильтра 22, фотоприемного элемента 23, при этом фотоприемный элемент 23 электрически связан с предварительным усилителем 24, а предварительный усилитель 24 электрически связан с регулятором коэффициента усиления 25, причем цифровой вычислитель 9 состоит по крайней мере из двух блоков согласования аналоговых сигналов 26, цифроаналогового преобразователя 27, время-цифрового преобразователя 28, центрального процессорного устройства 29, оперативного запоминающего устройства 30, постоянного запоминающего устройства 31, при этом блоки согласования аналоговых сигналов 26 электрически соединены с цифроаналоговым преобразователем 27 и время-цифровым преобразователем 28, а цифроаналоговый преобразователь 27 и время-цифровой преобразователь 28 электрически соединены с центральным процессорным устройством 29, при этом центральное процессорное устройство электрически соединено с оперативным запоминающим устройством 30 и постоянным запоминающим устройством 31, при этом центральное процессорное устройство 29 электрически связано через блок сопряжения 32 с потребителем информации 10, при этом передающий оптический тракт 6 содержит последовательно расположенные на первой оптической оси горизонтальный линейный модулятор 2, горизонтальный Фурье-объектив 33, причем в фокусе горизонтального Фурье-объектива 33 расположен горизонтальный непрозрачный фазовый фильтр 34 и горизонтальный проекционный объектив 35, а на второй оптической оси, которая параллельна первой оптической оси, последовательно расположены вертикальный линейный модулятор 4, вертикальный Фурье-объектив 36, причем в фокусе вертикального Фурье-объектива 36 расположен вертикальный непрозрачный фазовый фильтр 37 и вертикальный проекционный объектив 38, при этом непрозрачные фазовые фильтры 34 и 37 помещены в фокусах горизонтального и вертикального Фурье-объективов 33 и 36 соответственно, при этом размеры непрозрачных фазовых фильтров подобраны так, что непрозрачные фазовые фильтры 34 и 37 перекрывают световые потоки горизонтального и вертикального лазерных пучков в нулевом порядке соответственно.
В другом варианте осуществления устройства (Фиг. 8) введен блок 39 формирования кодированного зондирующего сигнала, электрически связанный с лазерным излучателем 1 и цифровым вычислителем 9.
В другом варианте осуществления устройства (Фиг. 1-9) в лазерный излучатель 1 введены по крайней мере один дополнительный лазерный источник света 40 с длиной волны, отличной от длины волны лазерного источника света 17, и оптически сопряженное с ним по крайней мере одно дихроичное зеркало 41, причем дихроичное зеркало 41 расположено на оптической оси между лазерным источником света 17 и коллиматором 18, при этом дихроичное зеркало 41 прозрачно для лазерного источника света 17 и непрозрачно для дополнительного лазерного источника 40.
В другом варианте осуществления устройства (Фиг. 1-10) на оптической оси между лазерным излучателем 1 и горизонтальным линейным модулятором 2 введен горизонтальный прозрачный параллелепипед полного внутреннего отражения 42, одной гранью контактирующий оптически с первой диэлектрической прозрачной подложкой 11 так, чтобы на свободной границе прозрачного гелеобразного слоя 13 было обеспечено полное внутреннее отражение, а между лазерным излучателем 1 и вертикальным линейным модулятором 4 введен вертикальный прозрачный параллелепипед полного внутреннего отражения 43, одной гранью контактирующий оптически с первой диэлектрической прозрачной подложкой 11 так, чтобы на свободной границе прозрачного гелеобразного слоя 13 было обеспечено полное внутреннее отражение.
В другом варианте осуществления устройства (Фиг. 2-12) введен дополнительный приемный оптико-электронный тракт 44, электрически связанный с цифровым вычислителем 9.
В другом варианте осуществления устройств (Фиг. 6, 13-20) апертура системы n штук линейчатых прозрачных электродов 14 разбита на k секторов, причем k≥2, а апертура системы m штук линейчатых прозрачных электродов 14 разбита на k секторов, причем k≥2, а каждый сектор горизонтального линейного модулятора 2 и соответствующего ему вертикального линейного модулятора 4 совпадают по апертуре, причем введен блок 45 коммутации сигналов управления электродами 14 горизонтального модулятора 2, управляющий k секторами горизонтального модулятора 2, и введен блок 46 коммутации сигналов управления электродами 14 вертикального модулятора 4, управляющий k секторами вертикального модулятора 4, причем блок 45 коммутации сигналов управления системой n штук линейчатых прозрачных электродов 14 горизонтального модулятора 2 электрически соединен с системой управления 3 горизонтального линейного модулятора 2 и цифровым вычислителем 9, причем блок 46 коммутации сигналов управления системой m штук линейчатых прозрачных электродов 14 вертикального линейного модулятора 4 электрически соединен с системой управления 5 вертикального линейного модулятора 4 и цифровым вычислителем 9, а система n штук линейчатых прозрачных электродов 14 в горизонтальном линейном модуляторе 2 и система m штук линейчатых прозрачных электродов 14 в вертикальном линейном модуляторе 4 взаимно перпендикулярны.
Предложенное устройство работает следующим образом.
Лазерный излучатель 1 (Фиг. 1-7), содержащий лазерный источник света 17, с помощью осветительного объектива 18 формирует параллельный пучок света, который попадает на расщепитель света 19 (Фиг. 4), формирующий два потока излучения, один из которых попадает на горизонтальный линейный модулятор 2, а второй поток попадает на зеркало 20, которое отражает излучение на вертикальный линейный модулятор 4. Момент времени излучения фиксируется время-цифровым преобразователем 28. С помощью систем управления 3 и 5 подаются управляющие импульсы напряжения на электроды 14 (Фиг. 2) горизонтального и вертикального модуляторов 2 и 4. В результате действия модулированного электрического поля на поверхности гелеобразного слоя 13 образуется геометрический рельеф (Гущо Ю.П. Физика рельефографии, Москва, 1999). На Фиг. 3 показан пример осциллограмм импульса электрического сигнала VN и отклика прозрачного гелеобразного слоя 13 в виде амплитуды рельефа А. Для модуляторов 2 и 4, как следует из осциллограмм, типична задержка возникновения рельефа А. Эта задержка зависит от геометрии модулятора, свойств носителя и др. Из осциллограмм видно, что время отклика модуляторов 3 и 4 лежит в микросекундном диапазоне. Экспериментальные исследования показали, что можно достичь время отклика около 1 микросекунды. Модулированный свет от модуляторов 2 и 4 (Фиг. 5, 6, 7) попадает на Фурье-объективы 33 и 36 соответственно. При этом нулевой порядок перекрывается непрозрачными фазовыми фильтрами 34 и 37, а дифрагированный свет с помощью горизонтального и вертикального проекционных объективов 35 и 38 попадает на объект наблюдения 7 (Фиг. 7). Отраженное от объекта 7 излучение попадает в оптико-электронный фотоприемный тракт 8 (Фиг. 5), фокусируясь приемным объективом 21 на фотоприемный элемент 23, между которыми расположен полосой оптический фильтр 22, обеспечивающий ослабление фонового излучения на длине волн, отличной от длины волны излучателя. Выходной токовый сигнал фотоприемного элемента 23 предварительного усилителя 24 преобразуется в напряжение, которое поступает на вход регулятора коэффициента усиления 25, причем коэффициент усиления задается цифровым вычислителем 9 (Фиг. 5).
В другом варианте изобретения (Фиг. 8) устройство работает следующим образом. Цифровой вычислитель 9 устанавливает текущий тип зондирующего импульса и его параметры (длительность, скважность, тип модулирующей цифровой последовательности) для блока 39 формирования кодированного зондирующего сигнала по последовательному интерфейсу информационного обмена. Блок 39 содержит в своем составе, например, быстродействующий микроконтроллер или программируемую логическую интегральную схему, которая задает управляющие сигналы для лазерного источника света 17 для формирования кодированной последовательности оптических импульсов, модулированной последовательностью Уэлча-Костаса, Гоулда и пр. [Hooshang Ghafouri-Shiraz, М. Massoud Karbassian. Optical CDMA networks: principles, analysis and applications. Wiley, 2012]. Применение сложного кодированного зондирующего сигнала и методов его детектирования позволяет увеличить надежность обнаружения объектов в поле зрения лидара и улучшить качество работы при одновременной работе нескольких однотипных систем.
В другом варианте изобретения (Фиг. 1-9) устройство работает следующим образом. В лазерном излучателе 1 свет от дополнительного лазерного источника света 40 с длиной волны, отличной от длины волны лазерного источника света 17, попадает на дихроичное зеркало 41 и, отражаясь от него, направляется параллельного главной оптической оси на коллиматор 18, который формирует параллельный пучок света, падающий на расщепитель света 19. Часть света проходит к зеркалу 20 и попадает на вертикальный линейный модулятор 4, другая часть света, благодаря расщепителю, поворачивается на 90 градусов и попадает на горизонтальный линейный модулятор 2. Таким образом, лидар может работать одновременно с двумя лазерными источниками света. Наличие двух источников света позволяет увеличить разрешение системы, а также в зависимости от прозрачности среды имеется возможность выбора излучения, для которого среда является более прозрачной.
В другом варианте изобретения (Фиг. 1-10) устройство работает следующим образом. От лазерного излучателя 1 свет попадает на горизонтальный прозрачный параллелепипед полного внутреннего отражения 42 и проходит до свободной поверхности прозрачного гелеобразного слоя 13 горизонтального линейного модулятора 2, за счет полного внутреннего отражения отражается от свободной поверхности прозрачного гелеобразного слоя 13 и направляется на горизонтальный Фурье-объектив 33. Далее нулевой порядок излучения перекрывается горизонтальным непрозрачным фазовым фильтром 34, а дифрагированный свет проходит на горизонтальный проекционный объектив 35 и попадает на объект наблюдения 7. Другая часть света от лазерного излучателя 1 света попадает на вертикальный прозрачный параллелепипед полного внутреннего отражения 43 и проходит до свободной поверхности прозрачного гелеобразного слоя 13 вертикального линейного модулятора 4, за счет полного внутреннего отражения отражается от свободной поверхности прозрачного гелеобразного слоя 13 и направляется на вертикальный Фурье-объектив 36. Далее нулевой порядок излучения перекрывается непрозрачным фазовым фильтром 37, а дифрагированный свет проходит на вертикальный проекционный объектив 38 и попадает на объект наблюдения 7. Использование параллелепипедов полного внутреннего отражения в передающем оптическом тракте 6 позволяет снизить оптические шумы, поскольку свет не проходит через прозрачные электроды управления, а также увеличить чувствительность модуляторов 2 и 4, благодаря увеличению оптического пути на деформируемой поверхности прозрачного гелеобразного слоя 13. Таким образом, введение параллелепипедов полного внутреннего отражения позволяет увеличить чувствительность и уменьшить оптические шумы в лидаре без подвижных частей.
В другом варианте изобретения (Фиг. 2-12) устройство работает следующим образом. Введенный дополнительный оптико-электронный тракт 44 принимает оптические импульсы, отраженные от объекта наблюдения 7, фильтрует эти импульсы и преобразует их в электрические сигналы, усиленные до необходимого уровня, которые попадают на блоки согласования 261…26n (Фиг. 12). При использовании, например, двух лазерных источников света с разной длиной волны излучения 17, 40 и корректном подборе параметров приемных оптико-электронных трактов 8 и 44 возможна согласованная работа лидара по двум независимым каналам.
В другом варианте изобретения (Фиг. 6, 13-20) устройство работает следующим образом. Для формирования необходимой диаграммы направленности зондирующего импульса цифровой вычислитель 9 формирует сигналы управления для блоков коммутации 45 и 46 (Фиг. 13) сигналов управления электродами вертикального и горизонтального модуляторов при условии разбиения рабочей зоны модуляторов на заданное число секторов (Фиг. 14.). Цифровой вычислитель 9 формирует также сигналы управления электродами для каждого сектора модуляторов. Применение модуляторов с разбиением рабочих областей на секторы позволяет обеспечить независимое управление диаграммы направленности зондирующего импульса по азимуту и углу места для каждого модулятора.
Выходом приемного оптико-электронного тракта 8 является аналоговый сигнал, который согласуется с входами время-цифрового преобразователя 28 при помощи блоков согласования аналоговых сигналов 261-26n, при этом согласование производится путем пороговой обработки входного аналогового сигнала с программно задаваемыми порогами (Фиг. 12.), причем время прихода фронтов и спадов регистрируется время-цифровым преобразователем 28.
В связи с тем что точность измерения дальности лидара зависит от точности измерения времени распространения зондирующего сигнала, для точной временной привязки производится процедура восстановления огибающей принятого сигнала. На Фиг. 15 представлена временная диаграмма полученного сигнала. При двух заданных порогах регистрации входного сигнала Vth1 и Vth2 производится регистрация четырех событий: регистрация фронта отраженного импульса по порогу Vth1 в момент времени t1+, регистрация фронта отраженного импульса по порогу Vth2 в момент времени t2+, регистрация спада отраженного импульса по порогу Vth2 в момент времени t2- и регистрация спада отраженного импульса по порогу Vth1 в момент времени t1-. Восстановление формы огибающей принятого сигнала по четырем точкам и уточнение момента времени его прихода производится методом интерполяции в зависимости от используемой математической модели отклика [Головков А., Пивоваров И., Кузнецов И. Компьютерное моделирование и проектирование радиоэлектронных средств. Учебник для вузов. Стандарт третьего поколения. - СПб.: Питер, 2015 - 208 с.]. Данные о зарегистрированных временных метках передаются в центральное процессорное устройство 29 (Фиг. 6).
Цифроаналоговый преобразователь 27, команды для которого задаются центральным процессорным устройством 29, формирует пороги срабатывания блоков согласования аналоговых сигналов 261 и 26n и регулятора коэффициента усиления 25.
Хранение оперативных данных центрального процессорного устройства 29 производится в оперативном запоминающем устройстве 30. Хранение настроек, калибровочных коэффициентов и служебных данных производится в постоянном запоминающем устройстве 31.
Информационный обмен центрального процессорного устройства 29 с потребителем информации 10 производится через блок сопряжения 32 с потребителем информации. При этом в качестве потребителя информации 10 могут использоваться системы визуализации изображения, системы управления робототехнических комплексов и т.д.
Верхний ключ 47 и нижний ключ 48 образуют полумостовую схему, которая управляет напряжением на системе линейчатых прозрачных электродов 14 (Фиг. 18). При этом верхний ключ 47 подключает высокое управляющее напряжение на систему линейчатых прозрачных электродов 14, а нижний ключ 48 подключает на систему линейчатых прозрачных электродов 14 управляющее напряжение.
Многоканальная схема 49 управления электродами горизонтального 2 и вертикального 4 модуляторов коммутирует управляющие напряжения V1…VN на системе линейчатых прозрачных электродов 14 (Фиг. 19). Цифровой вычислитель 9 вырабатывает алгоритм коммутации системы электродов 14.
Для увеличения чувствительности модулятора используется дополнительный источник питания 50, увеличивающий напряженность электрического поля в зазоре 16 (Фиг. 2). (Гущо Ю.П. Физика рельефографии, Москва, 1999, стр. 323).
С помощью драйвера 51 с раздельным управлением выходными каналами происходит управление оптическим излучением через верхний ключ 52 и нижний ключ 55 путем коммутации электрического тока на лазерный диод 53 (Фиг. 20). При этом, если ключ 52 открыт, а ключ 55 закрыт, происходит заряд буферного конденсатора 54, запасенная энергия которого ограничивает оптическую мощность в режиме излучения.
Циклограмма работы устройства представлена на Фиг. 16, где:
t1-t2 - время формирования порогов срабатывания для блоков согласования аналоговых сигналов 261 и 26n и регулятора коэффициента усиления 25 цифровым вычислителем 9 управляющих сигналов для системы управления 3 и системы управления 5;
t2-t3 - время заряда буферного конденсатора 54 при активном горизонтальном модуляторе 2 с помощью ключа 52 к шине питания VLD (Фиг. 20);
t2-t5 - время выдачи управляющего сигнала, формируемого системой управления 3 для горизонтального модулятора 2;
t2-t4 - время переходного процесса горизонтального модулятора 2 при подаче управляющего сигнала;
t4-t5 - время излучения лазерного диода 53 при активном горизонтальном линейном модуляторе 2;
t5-t6 - время ожидания отклика зондирующего импульса приемного оптико-электронного тракта 8 при активном горизонтальном линейном модуляторе 2;
t6-t7 - время заряда буферного конденсатора 54 при активном вертикальном модуляторе 4 путем коммутации верхнего ключа 52 к шине питания VLD;
t6-t9 - время выдачи управляющего сигнала, формируемого системой управления 5 для вертикального линейного модулятора 4 и обработки отклика приемного оптико-электронного тракта 8 цифровым вычислителем 9 при активном горизонтальном линейном модуляторе 2.
t8-t9 - время излучения лазерного диода 53 при активном вертикальном линейном модуляторе 4;
t9-t10 - время ожидания отклика зондирующего импульса приемного оптико-электронного тракта 8 при активном вертикальном линейном модуляторе 4;
t10-t11 - время обработки отклика приемного оптико-электронного тракта 8 вычислителем 9 при активном вертикальном линейном модуляторе 4;
t11-t12 - время информационного обмена между цифровым вычислителем 9 и потребителем информации 10.
Оценка расстояния до наблюдаемых объектов в допущении малого относительного перемещения объекта наблюдения 7 и лидара может быть произведена следующим образом.
Пусть активация i-го электрода горизонтального модулятора 2 формирует диаграмму направленности qi зондирующего импульса, а активация j-го электрода вертикального модулятора 4 формирует диаграмму направленности pj горизонтального модулятора.
В начальный момент времени активируются все электроды 14 модулятора 2 или 4, формируя диаграмму направленности, соответствующую полному полю зрения лидара. При регистрации откликов с полной апертурой происходит их ранжирование по времени распространения, при этом определяется минимальное время отклика от наблюдаемых объектов и производится снижение апертуры сканирования (путем уменьшения количества включенных электродов), итерационно повторяемое до момента отсутствия откликов. Переключение электродов 14 модуляторов 2 и 4 происходит последовательно, в соответствии с циклограммой, приведенной на Фиг. 16.
При отсутствии отклика производится возврат к предыдущей апертуре (путем коммутации необходимого количества электродов модуляторов 2 и 4), при этом осуществляется попеременное сканирование всего массива электродов вертикального и горизонтального модуляторов или их частей.
При совпадении откликов вертикального и горизонтального модуляторов по времени - происходит оценка координат объекта в поле зрения (Фиг. 17). Азимут и угол места относительно строительных осей лидара соответствует диаграммам направленности, задаваемым вертикальным и горизонтальным модулятором, а расстояние d до него при известном времени хода зондирующего сигнала может быть определено как:

где с - скорость распространения зондирующего сигнала в среде, t - время полного хода зондирующего сигнала.
При использовании модуляторов с разбиением рабочих зон на сектора (Фиг. 14) при достаточном количестве секторов k и при введение блоков коммутации 45 и 46 сигналов управления электродами линейных модуляторов 2 и 4 (Фиг. 18) возможно упрощение алгоритма оценки дальности до наблюдаемых объектов, в связи с отсутствием необходимости сопоставления откликов от наблюдаемых объектов при раздельной работе горизонтального и вертикального модуляторов, т.к. диаграмма направленности зондирующего сигнала при использовании каждого из модуляторов может управляться в двух измерениях. Управление диаграммой направленности по углу места может осуществляться выбором блоком коммутации сигналов управления электродами необходимого сектора модулятора, а по азимуту - выбором электродов внутри данного сектора.
Пример реализации изобретения
Устройство по настоящему изобретению может быть выполнено следующим образом.
В качестве когерентного лазерного источника света 17 могут быть использованы, например, полупроводниковые лазеры или лазеры на парах меди, золота, стронция, а также газовые лазеры. Для обеспечения достаточного уровня быстродействия и высокой энергоэффективности в качестве коммутирующих элементов драйвера когерентного источника света целесообразно применять транзисторы на нитриде галлия, позволяющие формировать зондирующие импульсы длительностью менее 1 нс и оптической энергией не менее 70 нДж. Реализация устройства драйвера может быть осуществлена известными методами (Alex Lidow, Johan Strydom, Michael de Rooij, David Reusch. GaN Transistors for Efficient Power Conversion, 2-nd Edition).
В качестве элементов систем управления 3 и 5 могут быть использованы стандартные микросхемы или наборы микросхем, уровень интеграции зависит от технических требований устройств. Для индивидуального управления электродами 14 горизонтального 2 и вертикального 4 линейных модуляторов для оптимизации количества электрических соединений целесообразно использовать многоканальные драйверы с последовательной загрузкой данных в регистр-защелку и возможностью последовательного объединения (например, HV583).
Система n (m) штук линейчатых прозрачных электродов 14 может быть выполнена из алюминия, хрома, молибдена, окиси индия. В качестве остальных элементов и блоков могут быть использованы стандартные элементы и блоки. Зазор 16 можно выбрать, например, 10 мкм, а толщину прозрачного гелеобразного слоя 13, например, 45 мкм. Толщина системы n (m) штук линейчатых прозрачных электродов 14 может быть выбрана от десятых до сотых долей микрона. Электрические сигналы, поступающие от блока управления 3 на вход модуляторов 2, 4, могут быть, например, выбраны следующими: максимальное напряжение сигнала 15-20 В, длительность управляющего импульса - не менее 7 мкс.
Прозрачный гелеобразный слой 13 приготавливают на основе полиорганосилоксана известными методами (Патент №2577802, Спеклоподавитель для лазерного излучения (варианты), классы МПК7: G02F 1/00).
Первая диэлектрическая прозрачная подложка 11 и вторая диэлектрическая прозрачная подложка 15 должны быть выполнены из одного материала, например из кварцевого стекла. Прозрачный электропроводящий слой 12 - из окиси индия.
Форма k секторов в горизонтальном линейном модуляторе 2 и вертикальном линейном модуляторе 4 может быть выбрана в виде, например, прямоугольника, шестигранника или иной формы, при этом формы секторов в горизонтальном линейном модуляторе 2 и вертикальном линейном модуляторе 4 всегда совпадают.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФРАКЦИОННЫЙ ЛИДАР | 2017 |
|
RU2680655C2 |
| ЛИДАР | 2020 |
|
RU2759260C1 |
| КОМПАКТНЫЙ ЛИДАР | 2020 |
|
RU2756987C1 |
| ФАЗИРОВАННЫЙ ЛИДАР | 2018 |
|
RU2690537C1 |
| ЛАЗЕРНЫЙ ОСВЕТИТЕЛЬ | 2017 |
|
RU2658572C1 |
| ЭЛЕКТРООПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ, ГЕЛЕОБРАЗНЫЙ СЛОЙ ДЛЯ ЭЛЕКТРООПТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ, СПОСОБ ПРИГОТОВЛЕНИЯ ГЕЛЕОБРАЗНОГО СЛОЯ (ВАРИАНТЫ) И КОМПОЗИЦИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2002 |
|
RU2230348C1 |
| ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ | 2017 |
|
RU2687989C2 |
| СПЕКЛОПОДАВИТЕЛЬ ДЛЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2577802C2 |
| РЕЛЬЕФОГРАФИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЗАПИСИ ИНФОРМАЦИИ | 1992 |
|
RU2031624C1 |
| ТЕЛЕВИЗИОННЫЙ ПРОЕКТОР | 1995 |
|
RU2080641C1 |
Изобретение относится к управлению лазерным излучением без подвижных частей с возможностью управления направлением, интенсивностью, частотой и фазовыми характеристиками светового излучения и может найти применение в ряде специальных областей, в оптической локации, системах управления робототехническими комплексами, системах помощи водителям автотранспортных средств, системах предупреждения столкновения с препятствиями, картографирования и навигации. Заявленный лидар без подвижных частей содержит лазерный излучатель, горизонтальный линейный модулятор, систему управления горизонтальным линейным модулятором, вертикальный линейный модулятор, систему управления вертикальным линейным модулятором, передающий оптический тракт, направленный на объект наблюдения, приемный оптико-электронный тракт, цифровой вычислитель и потребитель информации. Причем горизонтальный модулятор содержит нанесенный на первую диэлектрическую прозрачную подложку прозрачный электропроводящий слой, покрытый прозрачным гелеобразным слоем, и систему n штук линейчатых прозрачных горизонтальных электродов, расположенных в одной плоскости на второй диэлектрической прозрачной подложке, размещенных с зазором над прозрачным гелеобразным слоем и соединенных электрически с системой управления горизонтальным линейным модулятором. Вертикальный линейный модулятор содержит нанесенную на первую диэлектрическую прозрачную подложку прозрачный электропроводящий слой, покрытый прозрачным гелеобразным слоем, и систему m штук линейчатых прозрачных вертикальных электродов, расположенных в одной плоскости на второй диэлектрической прозрачной подложке, размещенных с зазором над прозрачным гелеобразным слоем и соединенных электрически с системой управления вертикальным линейным модулятором. Причем лазерный излучатель, система управления горизонтальным линейным модулятором, система управления вертикальным линейным модулятором, приемный оптико-электронный тракт и потребитель информации электрически соединены с цифровым вычислителем. 5 з.п. ф-лы, 20 ил.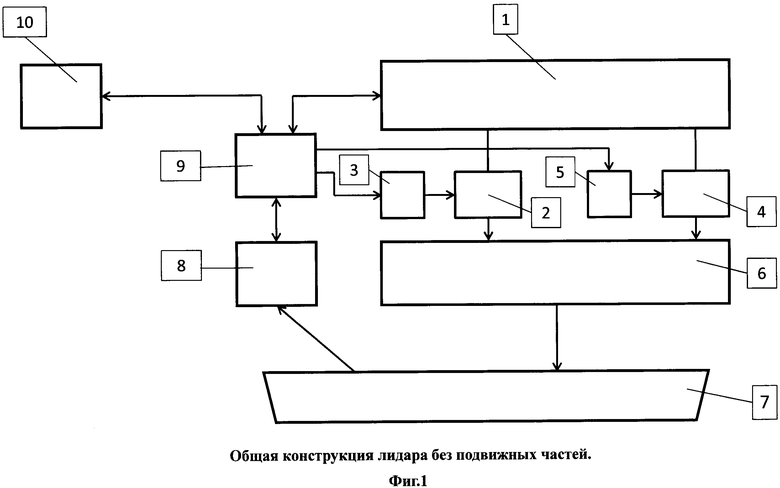
1. Лидар без подвижных частей содержит лазерный излучатель, горизонтальный линейный модулятор, систему управления горизонтальным линейным модулятором, вертикальный линейный модулятор, систему управления вертикальным линейным модулятором, передающий оптический тракт, направленный на объект наблюдения, приемный оптико-электронный тракт, цифровой вычислитель и потребитель информации, причем горизонтальный модулятор содержит нанесенную на первую диэлектрическую прозрачную подложку прозрачный электропроводящий слой, покрытый прозрачным гелеобразным слоем, и систему n штук линейчатых прозрачных горизонтальных электродов, расположенных в одной плоскости на второй диэлектрической прозрачной подложке, размещенных с зазором над прозрачным гелеобразным слоем и соединенных электрически с системой управления горизонтальным линейным модулятором, при этом n выходов системы управления горизонтальным линейным модулятором соединены с n входами системы линейчатых прозрачных электродов, при этом система линейчатых прозрачных горизонтальных n электродов покрывает световую апертуру второй диэлектрической прозрачной подложки, при этом все линейчатые прозрачные горизонтальные n электроды электрически изолированы друг от друга, а вертикальный линейный модулятор содержит нанесенную на первую диэлектрическую прозрачную подложку прозрачный электропроводящий слой, покрытый прозрачным гелеобразным слоем, и систему m штук линейчатых прозрачных вертикальных электродов, расположенных в одной плоскости на второй диэлектрической прозрачной подложке, размещенных с зазором над прозрачным гелеобразным слоем и соединенных электрически с системой управления вертикальным линейным модулятором, при этом m выходов системы управления соединены с m входами системы линейчатых прозрачных электродов, при этом линейчатые прозрачные вертикальные m электроды покрывают световую апертуру второй диэлектрической прозрачной подложки, при этом все линейчатые прозрачные вертикальные m электроды электрически изолированы друг от друга, причем лазерный излучатель, система управления горизонтальным линейным модулятором, система управления вертикальным линейным модулятором, приемный оптико-электронный тракт и потребитель информации электрически соединены с цифровым вычислителем, причем лазерный излучатель состоит из лазерного источника света, коллимматора, зеркала и расщепителя света на горизонтальный и вертикальный пучки, каждый из которых оптически соединен с горизонтальным линейным модулятором и вертикальным линейным модулятором, причем приемный оптико-электронный тракт состоит из расположенных последовательно на оптической оси объектива 21 приемного оптико-электронного тракта, полосового оптического фильтра, фотоприемного элемента, при этом фотоприемный элемент электрически связан с предварительным усилителем, а предварительный усилитель электрически связан с регулятором коэффициента усиления, причем цифровой вычислитель состоит по крайней мере из двух блоков согласования аналоговых сигналов, цифроаналогового преобразователя, время-цифрового преобразователя, центрального процессорного устройства, оперативного запоминающего устройства, постоянного запоминающего устройства, при этом блоки согласования аналоговых сигналов электрически соединены с цифроаналоговым преобразователем и время-цифровым преобразователем, а цифроаналоговый преобразователь и время-цифровой преобразователь электрически соединены с центральным процессорным устройством, при этом центральное процессорное устройство электрически соединено с оперативным запоминающим устройством и постоянным запоминающим устройством, при этом центральное процессорное устройство электрически связано через блок сопряжения с потребителем информации, при этом передающий оптический тракт содержит последовательно расположенные на первой оптической оси горизонтальный линейный модулятор, горизонтальный Фурье-объектив, причем в фокусе горизонтального Фурье-объектива расположен горизонтальный непрозрачный фазовый фильтр и горизонтальный проекционный объектив, а на второй оптической оси, которая параллельна первой оптической оси, последовательно расположены вертикальный линейный модулятор, вертикальный Фурье-объектив, причем в фокусе вертикального Фурье-объектива расположен вертикальный непрозрачный фазовый фильтр и вертикальный проекционный объектив, при этом непрозрачные фазовые фильтры помещены в фокусах горизонтального и вертикального Фурье-объективов и, соответственно, при этом размеры непрозрачных фазовых фильтров подобраны так, что непрозрачные фазовые фильтры перекрывают световые потоки горизонтального и вертикального лазерных пучков в нулевом порядке соответственно.
2. Устройство по п. 1, отличающееся тем, что введен блок формирования кодированного зондирующего сигнала, электрически связанный с лазерным излучателем и цифровым вычислителем.
3. Устройство по п. 1, отличающееся тем, что в лазерный излучатель введены по крайней мере один дополнительный лазерный источник света с длиной волны, отличной от длины волны лазерного источника света, и оптически сопряженное с ним по крайней мере одно дихроичное зеркало, причем дихроичное зеркало расположено на оптической оси между лазерным источником света и коллиматором, при этом дихроичное зеркало прозрачно для лазерного источника света и непрозрачно для дополнительного лазерного источника.
4. Устройство по п. 1, отличающееся тем, что на оптической оси между лазерным излучателем и горизонтальным линейным модулятором введен горизонтальный прозрачный параллелепипед полного внутреннего отражения, одной гранью контактирующий оптически с первой диэлектрической прозрачной подложкой так, чтобы на свободной границе прозрачного гелеобразного слоя было обеспечено полное внутреннее отражение, а между лазерным излучателем и вертикальным линейным модулятором введен вертикальный прозрачный параллелепипед полного внутреннего отражения, одной гранью контактирующий оптически с первой диэлектрической прозрачной подложкой так, чтобы на свободной границе прозрачного гелеобразного слоя было обеспечено полное внутреннее отражение.
5. Устройство по п. 1 и 4, отличающееся тем, что введен дополнительный приемный оптико-электронный тракт, электрически связанный с цифровым вычислителем.
6. Устройство по пп. 1-5, отличающееся тем, что апертура системы n штук линейчатых прозрачных горизонтальных электродов разбита на k секторов, причем k≥2, а апертура системы m штук линейчатых прозрачных вертикальных электродов разбита на k секторов, причем k≥2, а каждый сектор горизонтального линейного модулятора и соответствующего ему вертикального линейного модулятора совпадают по апертуре, причем введен блок коммутации сигналов управления электродами горизонтального модулятора, управляющий k секторами горизонтального модулятора, и введен блок коммутации сигналов управления электродами вертикального модулятора, управляющий k секторами вертикального модулятора, причем блок коммутации сигналов управления системой n штук линейчатых прозрачных горизонтальных электродов горизонтального модулятора электрически соединен с системой управления горизонтального линейного модулятора и цифровым вычислителем, причем блок коммутации сигналов управления системой m штук линейчатых прозрачных горизонтальных электродов вертикального линейного модулятора электрически соединен с системой управления вертикального линейного модулятора и цифровым вычислителем, а система n штук линейчатых прозрачных горизонтальных электродов в горизонтальном линейном модуляторе и система m штук линейчатых прозрачных горизонтальных электродов в вертикальном линейном модуляторе взаимно перпендикулярны.
| J | |||
| Stockley and S | |||
| Serati, Cascaded One-Dimensional Liquid Crystal OP As for 2-D Beam Steering, IEEE Aerospace Conference, Big Sky, Montana, 2003 | |||
| US 20150219764 A1, 06.08.2015 | |||
| US 20110216304 A1, 08.09.2011 | |||
| СПОСОБ И ЛИДАРНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТЕЙ АТМОСФЕРЫ, ОСУЩЕСТВЛЯЕМОГО НА БОРТУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, А ТАКЖЕ В АЭРОПОРТАХ И НА ВЕТРОВЫХ ЭЛЕКТРОСТАНЦИЯХ | 2006 |
|
RU2405172C2 |
| CN 201159766 Y, 03.12.2008. | |||

