Изобретение относится к радиолокационной технике и может быть использовано в радиолокационных системах целеуказания и идентификации объектов.
Известны радиолокационные системы целеуказания (РЛС ЦУ), содержащие две пространственно совмещенные или разнесенные станции [1]
Известна также РЛС ЦУ, содержащая две соединенные посредством радиолинии управления станции, одна из которых ведущая содержит топопривязчик (ТП) и последовательно соединенные систему управления антенной и автодальномер (СУА и АД), счетно-решающие прибор выдачи целеуказания (СРПВЦУ) и радиолинию управления (РЛУ), причем первый выход топопривязчика подключен к второму входу счетно-решающего прибора выдачи целеуказания, а другая ведомая содержит топопривязчик, датчик наклона и последовательно соединенные радиолинию управления, счетно-решающий прибор целеуказания (СРП ЦУ) и систему управления антенной и автодальномер, причем первый выход топопривязчика и выход датчика наклона подключены к второму и третьему входам счетно-решающего прибора целеуказания соответственно [2]
Недостатком известной системы ЦУ является снижение вероятности целеуказания по сравнению с заданной при наличии в зоне действия системы нескольких целей.
Причина указанного недостатка заключается в том, что определение размеров зоны осуществляется в ней, исходя лишь из результирующих максимальных ошибок отработки ЦУ по соответствующим координатам без учета возможного попадания в эту зону нескольких (истинных или ложных) целей, их количества, текущего пространственного положения целей относительно ведущей и ведомой станций, взаимного расположения станций друг относительно друга по дальности и направлению, а также других факторов, влияющих на качество (вероятность) выполнения задачи целеуказания.
Заявляемое изобретение направлено на решение задачи повышения вероятности целеуказания при наличии в зоне действия системы нескольких целей.
Решение поставленной задачи достигается тем, что в РЛС ЦУ, содержащую две соединенные посредством РЛУ станции, одна из которых ведущая содержит ТП и последовательно соединенные СУА и АД, СРПВЦУ и РЛУ, причем первый выход ТП подключен к второму входу СРПВЦУ, а другая ведомая содержит ТП, датчик наклона и последовательно соединенные РЛУ, СРП ЦУ и СУА и АД, причем первый выход ТП и выход датчика наклона подключены к второму и третьему входам СРП ЦУ соответственно, дополнительно введены на ведущей станции последовательно соединенные блок разности, блок определения базы и направления и блок формирования стробов, причем первый и второй входы блока разности подключены к второму выходу ТП и выходу РЛУ соответственно, второй выход СУА и АД соединен с вторым входом блока формирования стробов, выход которого подключен к второму входу РЛУ; на ведомой станции последовательно соединенные блок преобразования координат, блок разности, блок сравнения и блок управления, причем вход блока преобразования координат подключен к выходу СУА и АД, второй вход блока разности подключен к второму выходу СРП ЦУ, второй вход блока сравнения соединен с вторым выходом РЛУ, а выходы блока управления и ТП подключены к соответствующим выходам РЛУ.
На фиг. 1 изображена структурная схема заявляемого объекта, на фиг.2 - единая система координат для решения задачи целеуказания, на фиг.3 рисунок, показывающий возможности повышения вероятности целеуказания при осуществлении изобретения.
Конструктивно РЛС ЦУ состоит из ведущей и ведомой станций, содержащих (см. фиг.1) 1 датчик наклона, 2, 7 СУА и АД, 3 СРПВЦУ, 4, 5 РЛУ, 6 - СРП ЦУ, 8, 9 ТП, 10, 11 блоки разности, 12 блок преобразования координат, 13 блок определения базы и направления, 14 блок формирования стробов, 15 блок сравнения, 16 блок управления.
Устройство работает следующим образом (см. фиг.1 и 2).
На ведущей станции по принятым ею радиолокационным сигналам СУА и АД измеряют сферические координаты k-ой  выбранной цели относительно ее точки стояния: дальность R1k, азимут β1k, угол места ε1k.
выбранной цели относительно ее точки стояния: дальность R1k, азимут β1k, угол места ε1k.
Напряжения или коды, пропорциональные измеренным значениям координат, подаются на вход СРПВЦУ 3, куда из ТП 8 вводятся также прямоугольные координаты точки стояния ведущей станции (x1ТП,y1ТП) относительно начала единой системы координат (реперной точки).
СРПВЦУ 3 вырабатываются прямоугольные координаты ЦУ относительно реперной точки: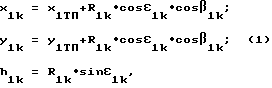
которые посредством РЛУ 4, 5 передаются на ведомую станцию. СРП ЦУ 6 с помощью ТП 9 преобразуют эти координаты к точке стояния ведомой станции: сначала в прямоугольные
x2k=x1k-x2ТП;
y2k=y1k-y2ТП;
h2k=h1k, (2)
а затем в сферические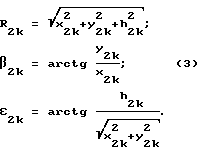
При необходимости в СРП ЦУ 6 производится учет углов наклона и разориентирования, измеряемых датчиком наклона 1 и ТП 9 (см.[2] с.46.49).
СУА 2 и АД 7 отрабатывают полученные данные ЦУ и производят допоиск цели в зоне, размеры которой обеспечивают заданную вероятность целеуказания (обычно ее стремятся сделать близкой к единице). После того, как ведомая станция обнаружит в указанной зоне l-ю цель (  , причем в общем случае при наличии нескольких целей в зоне l ≢ k), СУА 2 и АД 7 измеряют сферические координаты обнаруженной цели относительно точки стояния своей станции: дальность R2l, азимут β2l, угол места ε2l Напряжения или коды, пропорциональные измеренным значениям координат, подаются на вход блока преобразования 12, на выходе которого вырабатываются прямоугольные координаты l-ой цели:
, причем в общем случае при наличии нескольких целей в зоне l ≢ k), СУА 2 и АД 7 измеряют сферические координаты обнаруженной цели относительно точки стояния своей станции: дальность R2l, азимут β2l, угол места ε2l Напряжения или коды, пропорциональные измеренным значениям координат, подаются на вход блока преобразования 12, на выходе которого вырабатываются прямоугольные координаты l-ой цели: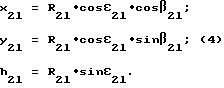
Эти координаты в блоке разности 11 вычитаются из соответствующих координат целеуказания x2k, y2k, h2k, поступающих из СРП ЦУ 6, образуя разности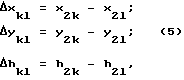
которые, в свою очередь, подаются на вход блока сравнения 15.
На второй вход блока сравнения с выхода блока формирования 14 через РЛУ 4, 5 подаются стробы, размеры которых по соответствующим координатам Δxстр, Δyстр, Δhстр обеспечивают заданную вероятность целеуказания.
Для этого в блоке разности 10 из координат топопривязки ТП 8 вычитаются соответствующие координаты ТП 9, прошедшие РЛУ 4 и 5, а полученные разности
подаются на вход блока определения базы и направления 13. В данном блоке реализуются зависимости
где b12 расстояние (база) между ведущей и ведомой станциями;
β12 азимут ведомой станции относительно ведущей.
Эти данные вводятся в блок формирования стробов 14, где совместно с текущими координатами цели, измеренными СУА и АД, и заданными дисперсиями (среднеквадратическими значениями) ошибок их измерения и топопривязки используются для определения и установки требуемых размеров стробов в соответствии с формулами
где r
r
h квадрат косинуса азимута k-ой цели относительно ведомой станции;
квадрат косинуса азимута k-ой цели относительно ведомой станции;
R квадрат синуса угла места k-ой цели относительно ведомой станции;
квадрат синуса угла места k-ой цели относительно ведомой станции;
σ
Формулы (8) получаются, если в (5) вместо одновременных координат подставить последовательно их значения из (4), (2), (1) с учетом очевидных из фиг. 2 геометрических соотношений и применить к полученному выражению известную из теории вероятностей теорему о дисперсии функции несколько независимых переменных в предположении о равноточности станций (см. Вентцель Е.С. Теория вероятностей. М. Физматгиз, 1969, с. 255-262).
В блоке сравнения 15 осуществляется идентификация (отождествление) координат k-ой и l-ой целей путем проверки выполнения условий (стробирования)
и по каждому результату сравнения вырабатываются сигналы 1 или 0 (при положительном или отрицательном результате соответственно), поступающие в блок управления 16.
В блоке управления 16 по одному из правил "3 из 3" или "2 из 2" (при поступлении всех трех или двух единиц соответственно 3"И" или 2"И") формируется признак отождествления k-ой и l-ой целей k ≡ l и вырабатывается сигнал отработки ЦУ, прекращающий выдачу целеуказания через РЛУ.
Из изложенного следует, что заявляемая радиолокационная система благодаря введению в нее новых существенных признаков способна успешно решать задачу целеуказания даже при наличии в зоне ее действия нескольких целей.
Реализация признаков изобретения 1.9 (см.фиг.1) известна и может быть выполнена так же, как и в прототипе (см.[2]).
Вновь введенные признаки (блоки 10.16, а также связи между ними и с другими элементами системы) могут быть реализованы на базе существующих средств аналоговой или цифровой схемотехники. Так, блоки разности 10, 11 могут представлять собой схемы вычитания (сочетание инвертора и сумматора), блоки преобразования координат 12, определения базы и направления 13, формирования стробов 14 могут быть выполнены в форме программируемых (настраиваемых) спецвычислителей, реализующих зависимости вида (4), (7), (8), блок сравнения 15 может быть построен как компаратор, а блок управления 16 как функциональное устройство на комбинационных логических элементах И, ИЛИ, НЕ.
Сравнение известной и предлагаемой РЛС ЦУ показывает, что при наличии в зоне действия системы нескольких целей последняя обеспечивает более высокую вероятность целеуказания.
Действительно вероятность целеуказания по аналогии с [2, с.155,156] [1, с.10,12] можно представить в виде
Pцу=Pцуk•(1-Pцуl), (10)
где Pцу вероятность ЦУ;
Pцуk вероятность попадания в зону ЦУ (стробы Δxстр, Δyстр, Δhстр ) k-ой цели;
(1-Pцуl) вероятность непопадания в зону ЦУ (стробы Δxстр, Δyстр, Δhстр ) l-ой цели.
Размеры зоны ЦУ (стробов) по соответствующим координатам выбираются в обеих системах из необходимости обеспечения заданной и одинаковой вероятности Pцуk _→ 1.
Отличие состоит в том, что в известной РЛС ЦУ эти стробы выбираются из расчета максимальных и неизменных значений ошибок целеуказания, а в новой системе размеры стробов адаптируются к положению целей и станций в пространстве в соответствии с зависимостями (8).
Поэтому размеры стробов в новой системе оказываются меньше, чем в ранее известной, вероятность попадания в них других целей (Pцуl) уменьшается, а общая вероятность целеуказания (Pцу) увеличивается с 
где NЦНА>NЦА количество целей, попавших в неадаптированные и адаптированные стробы соответственно. Достигаемый при этом выигрыш числено равен отношению вероятностей (1-Pцуl) для новой и известной систем и в геометрической интерпретации выражается отношением объемов неадаптированных и адаптированных стробов ЦУ.
В качестве примера на фиг.3 приведены результаты имитационного моделирования РЛС при наличии в зоне ЦУ двух целей и следующих исходных данных, соответствующих типовым радиолокационным станциям и целям:
дальность (R1k), м 50•103
азимут (β1k), град. 45
высота (h1k),м 3000
расстояние между целями (rkl), м 1500
расстояние между ведущей и ведомой станциями (b12), м 5000
азимут ведомой станции относительно ведущей (β12), град. 45
СКО ошибок измерения дальности (σR), м 150
СКО ошибок измерения углов (σβ, σε), град. 0,5
СКО ошибок топопривязки станций по координатам (sТП), м 150
Из формул (11) видно, что за счет адаптации количество целей в стробах уменьшается с NЦНА= 2 до NЦА=1, а вероятность целеуказания увеличивается с 0,5 до 1.
Применение заявляемой РЛС ЦУ кроме решения основной задачи позволяет осуществлять с помощью ведущей РЛС координатную поддержку ведомой станции, работающей в пассивном режиме или в условиях помех, для обеспечения ее скрытности, помехоустойчивости и живучести; проводить надежную идентификацию (отождествление) координат целей, наблюдаемых несколькими радиолокационными станциями; производить селекцию истинных и ложных (имитированных) целей, воздействующих на систему РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2005 |
|
RU2311659C2 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ИСТИННОСТИ ПЕРЕСЕЧЕНИЯ ПЕЛЕНГОВ | 1994 |
|
RU2084914C1 |
| СПОСОБ ЗАЩИТЫ ГРУППЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ С ИСПОЛЬЗОВАНИЕМ ДОПОЛНИТЕЛЬНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099734C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ЗАБРАСЫВАЕМОГО ПЕРЕДАТЧИКА ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2322681C2 |
| Измеритель нестабильности длительности импульсов | 1977 |
|
SU717713A1 |
| ПАССИВНЫЙ ПРИЕМОПЕРЕДАТЧИК | 2000 |
|
RU2174239C1 |
| Коммутационное устройство | 1985 |
|
SU1285486A1 |
| Измеритель флюктуаций периодов следования импульсов | 1978 |
|
SU697962A1 |
| ПАССИВНЫЙ ПРИЕМОПЕРЕДАТЧИК | 1999 |
|
RU2178897C2 |
| Устройство для измерения координат объекта | 1982 |
|
SU1059703A1 |
РЛС ЦУ состоит из двух станций, одна из которых ведущая, а другая - ведомая. Связь между станциями осуществляется посредством радиолиний управленя. Ведущая станция содержит топопривязчик и последовательно соединенные систему управления антенной и автодальномер, счетно-решающий прибор выдачи целеуказанния и радиолинию управления, при этом первый выход топопривязчика подключен к второму входу СРП выдачи ЦУ. Ведомая станция содержит топопривязчик, датчик наклона и последовательно соединенные радиолинию управления СРП ЦУ и систему управления антенной и автодальномер, причем первый выход токопривязчика и выход датчика наклона подключены к второму и третьему входам СРП ЦУ соответственно. Целью изобретения является повышение вероятности целеуказания при наличии в зоне действия системы нескольких целей. Для этого в РЛС дополнительно введены на ведущей станции последовательно соединенные блок разности, блок определения базы и направления и блок формирования стробов, причем первый и второй входы блока разности подключены к второму выходу токопривязчика и выходу радиолинии управления соответственно, второй выход системы управления антенной и автодальномер соединены с вторым входом блока формирования стробов, выход которого подключен к второму входу радиолинии управления; на ведомой последовательно соединенные блок преобразования координат, блок разности, блок сравнения и блок управления, причем вход блока преобразования координат подключен к выходу системы управления антенной и автодальномеру, второй вход блока разности подключен к второму выходу счетно-решающего прибора целеуказания, второй вход блока сравнения соединен с вторым выходом радиолинии управления, а выходы блока управления и топопривязчика подключены к соответствующим входам радиолинии управления. 3 ил.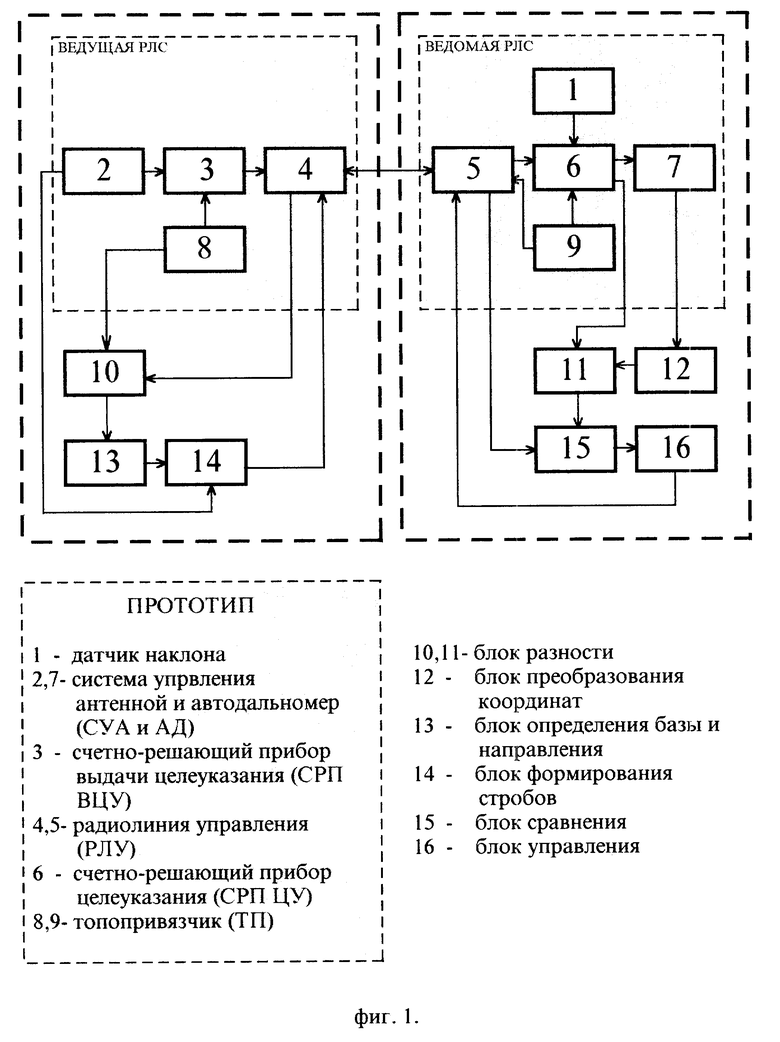
Радиолокационная система целеуказания, содержащая две соединенные посредством радиолиний управления станций, одна из которых ведущая содержит топопривязчик и последовательно соединенные систему управления антенной и автодальномер, счетно-решающий прибор выдачи целеуказания и радиолинию управления, причем первый выход топопривязчика подключен к второму входу счетно-решающего прибора выдачи целеуказания, а другая ведомая содержит топопривязчик, датчик наклона и последовательно соединенные радиолинию управления, счетно-решающий прибор целеуказания и систему управления антенной и автодальномер, причем первый выход топопривязчика и выход датчика наклона подключены к второму и третьему входам счетно-решающего прибора целеуказания соответственно, отличающаяся тем, что на ведущей станции дополнительно введены последовательно соединенные блок разности, блок определения базы и направления и блок формирования стробов, причем первый и второй входы блока разности подключены к второму выходу топопривязчика и выходу радиолинии управления соответственно, второй выход системы управления антенной и автодальномером соединены с вторым входом блока формирования стробов, выход которого подключен к второму входу радиолинии управления, а на ведомой станции дополнительно введены последовательно соединенные блок преобразования координат, блок разности, блок сравнения и блок управления, причем вход блока преобразования координат подключен к выходу системы управления антенной и автодальномеру, второй вход блока разности подключен к второму выходу счетно-решающего прибора целеуказания, второй вход блока сравнения соединен с вторым выходом радиолинии управления, а выходы блока управления и топопривязчика подключены к соответствующим входам радиолинии управления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузьмин С.З | |||
| Основы проектирования систем цифровой обработки радиолокационной информации | |||
| - М.: Радио и связь, 1986, с.8 - 13 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бурков Ю.Е., Кузнецов В.А | |||
| Основы проектирования счетно-решающих приборов зенитных комплексов | |||
| Учебник | |||
| - Киев: КВЗРИУ, 1985, с.42 - 49, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
