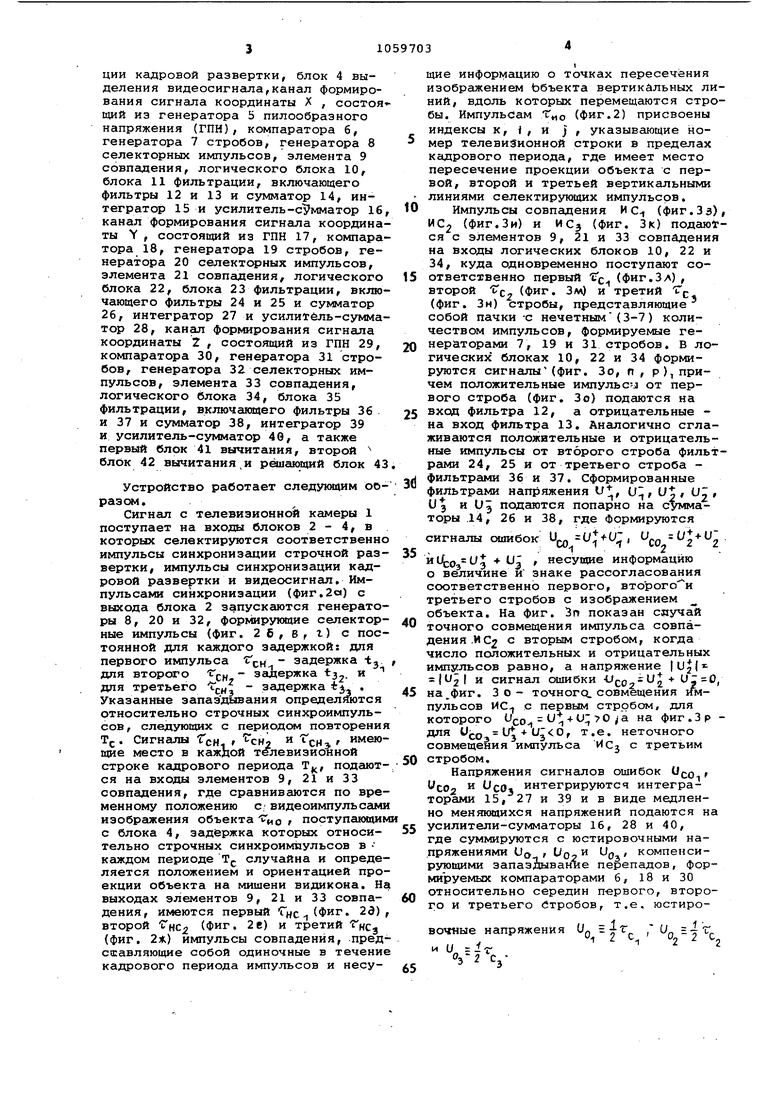
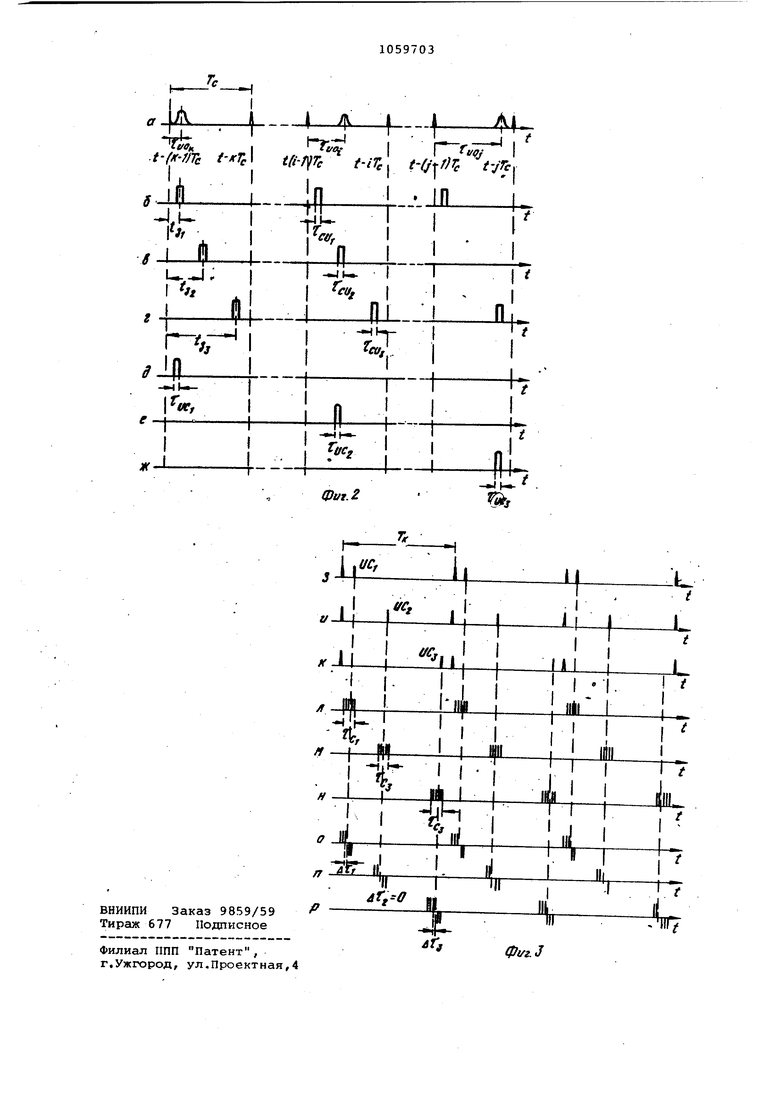
Изобретение относится к замкнутым телевизионным системам и может быть использовано в робототехнических установках в качестве информационного датчика для наведения манипулятора на объекты типа трос, провод или стержень, в -навигационных системах для слежения за линией горизонта, а также в аппаратуре контроля и управления полетами летательных аппаратов по инверсионному или дымовому следу. Известно устройство для измерения координат объекта, содержащее телевизионную камеру, выход которой подключен к двум каналам формирования сигналов координат X и V , а также синхрогенератор l . Однако устройство позволяет опре делять координаты объектов только по осям X и Y . Наиболее близким по технической сущности к предлагаемому является устройство для измерения координат объекта, содержащее телевизионную камеру, выход которой подключен к входам блока селекции импульсов син хронизации строчной развертки, блок выделения видеосигналами блока селекции импульсов синхронизации кадровой развертки, а также канал формирования сигнала координаты X и ка нал формирования сигнсша координаты Y, каждый из которых состоит из последовательно соединенных генератора пилообразного напряжения и компаратора, последовательно соединенных логического блока, блока.фильтравдии интегратора и усилителя-сумматора, выход которого подключен к другому входу компаратора, причем вход гене ратора пилообразного напряжения канала формирования сигнала координаты Y подключен к выходу блока селек ции импульсов синхронизации кадрово развертки С 2 J, Однако известное устройство не обеспечивает достаточной точности измерения координат объектов, проек ции которых на мишени видикона теле камеры представляют собой относител но тонкую линию, измерения угла нак лона данной проекции к горизонтальной оси и оценки степени ее изгиба. Цель изобретения - повышение точ ности измерения координат протяженных объектов.Для достижения поставленной цели в устройство для измерения координа объекта, содержащее телевизионную камеру, выход которой подключен к входам блока селекции импульсов син i хронизации строчной развертки, бло ка выделения видеосигнаша и блока селекции импульсов синхронизации кадровой развертки, а также канал формирования сигнала координаты X и канал формирования сигнала координаты V , каждый из которых состоит из последовательно соединенных генератора пилообразного напряжения и компаратора, последовательно соединеннее логического блока, блока фильтрации, интегратора и усилителя-сумматора, выход которого подключен к другому входу компаратора, причем вход генератора пилообразного напряжения канала формирования сигнала координаты V подключен к выходу блока селекции импульсов синхронизации кадровой развертки, введены два блока вычитания, решающий блок, в каждый из каналов формирования сигнала координаты X и у введены генератор стробов, включенный между выходо компаратора и первым входом логического блока, генератор селекторных импульсов и элемент совпадения, соединенные последовательно и включенные между выходом блока селекции импульсов синхронизации строчной развертки и вторым входом логического блока, причем другой вход элемента совпадения соединен с выходсм блока выделения видеосигнала, а в канапе формирования сигнала координаты X вход генератора пилообразного напряжения подключен к выходу блока сепекции импульсов синхронизации кадровой развертки, а также введен канал формирования -сигнала координаты Z , выполнение которого идентично выполнению канала формиро-г вания сигнгша координаты X и канала формирования сигнала координаты Y, при этсм выход интегратора канала формирования сигнала координаты X подключен к первым входдм первого блока вы11итамия и решающего блока, выход ин геграторг| канала формирования сигнгша координаты Y - к вторым входам первого блока вычитания и рияающего блока и первому входу второго блока вычитания, второй вход которого соединен с выходом интегратора формирования сигнгша координаты 2 выход которого соединен с тр&тъкм входсм решгиощего блока. На фиг.1 представлена структурная схема устройства; на фиг,2 - временные диаграммы, поясняющие формирование импу71ьсов совпадения от сравнения последовательности видеоимпульсами; на фиг.З - временные диаграммы, поясняющ е формирование сигналов ошибок измерения координат левой, средней и правой точек сечения проекции объекта на мишени видикона первым, вторым и третьим стробами (сигНс1лы сшибок на входах интеграторов) . Устройство содержит телевизионную KdMepy 1, блок 2 селекции импульсов синхронизации строчной развертки, блок 3 селекции илтульсов синхронизации кадровой развертки, блок 4 выделения видеосигнгша,канал формирования сигнала координаты X , состоя щий из генератора 5 пилообразного напряжения (ГПН), компаратора 6, генератора 7 стробов, генератора 8 селекторных импульсов, элемента 9 совпадения, логического блока 10, блока 11 фильтрации, включающего фильтры 12 и 13 и сумматор 14, интегратор 15 и усилитель-сУмматор 16, канал формирования сигнала координаты Y , состоящий из ГПН 17, компаратора 18, генератора 19 стробов, генератора 20 селекторных импульсов, элемента 21 совпадения, логического блока 22, блока 23 фильтрации, включающего фильтры 24 и 25 к сумматор 26, интегратор 27 и усилиогёль-сумматор 28, канал формирования сигнала координаты 2 , состоящий из ГПН 29, компаратора 30, генератора 31 стробов, генератора 32 селекторных импульсов, элемента 33 совпадения, логического блока 34, блока 35 фильтрации, включающего фильтры 36 и 37 и сумматор 38, интегратор 39 и усилитель-сумматор 40, а также первый блок 41 вычитания, второй блок 42 вычитаниями рёшакяций блок 43
Устройство работает следующим осразом.
Сигнал с телевизионной камеры 1 поступает на входы блоков 2 - 4, в которых селектируются соответственно импульсы синхронизации строчной развертки, импульсы синхронизации кадровой развертки и видеосигнал. Импульсами синхронизации (фиг.2а) с выхода блока 2 запускаются генераторы 8, 20 и 32, форкмрующие селекторные импульсы (фиг. 26, в, 1) с постоянной для каждого задержкой: для первого импульса Т(;н - задержка tj для второго fj-j - задержка , и для третьего tj-j - задержка t, . Указанные запаздывания определяются относительно строчных синхроимпульсов, следующих с периодом повторения Tj.. Сигналы Ген, f , и Г , имеющие место в каждой телевизионной строке кадрового периода Т,, подаются на входы элементов 9, 21 и 33 совпадения, где сравниваются по временному положению с/ видеоимпульсгили изображения объекта Сио f поступаквдим с блока 4, задержка которых относительно строчных синхроимпульсов в каждом периоде Т случайна и определяется положением и ориентацией проекции объекта на мишени видикона. На выходах элементов 9, 21 и 33 совпадения, имеются первый . 2Э), второй THC (фиг. 2е) и третий Тнсз (фиг. 2ж) импульсы совпадения, представляющие собой одиночные в течение кадрового периода импульсов и несущие информацию о точках пересечения изображением Ьбъекта вертикальных линий, вдоль которых перемещаются стробы. Импульсам TVIO (фиг.2) присвоены индексы к, 1 , и ) , указывающие номер телевизионной строки в пределах Ксщрового периода, где имеет место пересечение проекции объекта с первой, второй и третьей вертикальными линиями селектирующих импульсов.
Импульсы совпадения Ис (фиг.Зз) HCj (фиг.Зи) и ИСз (фиг. Зк) подаются с элементов 9, 21 и 33 совпадения на входы логических блоков 10, 22 и 34, куда одновременно поступают соответственно первый TC (фиг.3л) , второй tr (фиг. 3м) и третий Tj(фиг. Зн) стробы, представляющие собой пачки -с нечетным(3-7) количеством импульсов, формируемые генераторами 7, 19 и 31 стробов. В логических блоках 10, 22 и 34 формируются сигналы (фиг. Зо, п , р), причем положительные импульса от первого строба (фиг. Зо) подаются на вход фильтра 12, а отрицательные на вход фильтра 13. Аналогично сглаживаются положительные и отрицательные импульсы от второго строба фильтрами 24, 25 и от третьего строба фильтрами 36 и 37. Сформированные фильтрами напряжения , UIj, Ut, UI , УЗ и Uj подаются попарно на сумматоры .14, 26 и 38, где Форлтруются
сигналы ошибок U. ((},
и; , несущие информацию о величине и знаке рассогласования соответственно первого, второго и третьего стробов с изображением объекта. На фиг. 3rt показан случай точного совмещения импульса совпадения,И С2 с вторым стробом, когда число положительных и отрицательных импульсов равно, а напряжение tUj(
slUjI и сигнал етиибки -со2 2 на,фиг. Зо- точного, совмещения импульсов ИС с первым стробом, для которого UCQ UI;4U;70 а на фиг.Эр для lrt+Uj 0, т.е. неточного совмещения импульса Ис с третьим стробом.
Напряжения сигналов ошибок , сОо С0« интегрируютсч интеграторами 15, 27 и 39 и в виде медленно меняющихся напряжений подаются на усилители-сумматоры 16, 28 и 40, где суммируются с юстировочными напряжениями UQ , Uo2 и Ug , компенсирующими запаздавание перепадов, формируемых компараторами 6, 18 и 30 относительно середин п-ервого, второг;о и третьего Стробов, т.е. юстирои. Е
--2 С,
2 с.
Вьсходные напряжения интеграторов, воздействуя на генераторы стробов через усилители-сумматоры и -компараторы, вынуждают стробы смещаться таким образом, чтобы видеоимпульсы изображения делили их на равные части, а напряжения сигналов ошибок стремились к нулю.
Выходные напряжения Ujv Ujr-Ujj ,7-(JjT, блоков 41 и 42 вычитания в первом приближении пропорциональны углам наклона о., и -проекции изображения к горизонтальной оси мишени видикона и в определенной степени характеризуют ориентацию изображения. При совпадении проекции объекта с горизонтальной осью напряжения U-, а 0.
Выходное напряжение решгисяцего блока 43 пропорционально коэффициенту изгиба продольной оси изображения в средней области мишени видикона телекамеры. Определяется оно из уравнения Uy-::: 7/2{Uj Ujj|-U,7i , т.е, рииающий блок 43 содержит cfyNwarop напряжений Uj и Ujj , делитель полученной суммы на два и вы 1итаю1ций каскад. Для большей компактности структура решающего блока 43 на фиг.1 не раскрывается. Алгоритм вычисления решающего блока 43 напряжение 1/3 1/2 (Uj + Ujf и характеризует экстраполированное положение продольной оси проекции объекта в сечении средней вертикальной линии по измерениям первым и третьим стробами, а измеренное напряжение UJK - ее истинное положение. Очевидно, что разность этих напряжений, т.е. U г 1/2 (Uj + U)-и,, характеризует величину изгибаизоб ражения, а знак напряжения Оу, - его направление.
Дискриминационные характеристики каналов управления первым, вторым и третьим стробами идентичны. Их вид иллюстрируется зависимостями напряжений сигналов ошибок UCQ. от величиO ны рассогласования середин стробов с продольной осью изображения лТ,(где 1 1,2,3), Для первого и третьего стробов на фиг,3 показаны лIT и .aTj, Для второго строба в этом при5 мере Tj 0,
Ступенчатый характер дискриминационных характеристик обусловлен формой стробов и импульсным характером представления изображения объек0 та при строчно-кадровом кодировании телевизионных сигналов. Ширина линейной чёюти характеристики определяется длительностью строба С, , т,е, количестве входящих в него
5 строчных строб-импульсов.
Таким образом, наличие трех каналов с управляемыми следящими стробами позволяет измерять координаты Q неподвижного или перемещающегося произвольным образом изображения объекта,оценивать ориентгщию продольной оси в координатах мишени види- кона, измерять величину и направление изгиба изображения, что повышает точность измерения координат протяженных объектов.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1994 |
|
RU2096927C1 |
| Устройство для измерения геометрических параметров изображения объекта | 1985 |
|
SU1308836A1 |
| Устройство для считывания кодограмм | 1977 |
|
SU736136A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1286089A1 |
| СПОСОБ КОНТРОЛЯ ЦЕНТРИРОВКИ ЛИНЗ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2035712C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2139640C1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |
| Устройство для измерения координатных искажений фокусирующе-отклоняющей системы и передающей электронно-лучевой трубки | 1989 |
|
SU1660212A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА, содержащее телевизионную камеру, выхрд которой подключен к входам блока селекции импульсов синхронизации строчной развертки, блока выделения видеосигнала и блока селекдии импульсов синхронизации кадровой развертки, а также канал формирования сигнала координаты X и канал формирования сигнала координаты Y , каждый из которых состоит из последовательно соединенных генератора пилообразного напряжения и компаратора, последовательно соединенных логического блока, блока фильтрации, интегратора и усилителя-суьматора, выход которого подключен к другому входу компаратора, причем вход генератора пилообразного напряжения канала формирования сигнала координаты V подключен к выходу блока селекции импульсов синхронизации кадровой развертки, отличающееся тем, что, с целью повышения точности измерения координат протяженных объектов, в неговведены,,два блока вычитания, решающий блок, в каждый из каналов формирования сигнала координаты Л и V введены генератор стробов, включенный между выходом компаратора и первым входом логического блока, генератор селекторных импульсов и элемент совпадения, соединенные последовательно и включенные между выходом блока .селекции импульсов синхронизации строчной развертки и вторым входом логического блока, причем другой вход элемента совпадения соединен с выходом блока выделения видеосигнала, а в канале формирования сигнала координаты X вход генератора пилообразного напряжения подключен к выходу блока селекции импульсов сл синхронизации к.адровой развертки, а также введен канал формирования сигнала координаты Z, выполнение которого идентично выполнению канала формирования сигнала координаты X и канала формирования сигнала координаты Y , при этом выход.интегратора канала формирования сигнала координаты X подключен к первым входам СП первого блока вычитания и решающего да блока, выход интегратора канала формирования сигнала координаты Y - к вторым входам первого блока вычитао со ния и решгиощего блока и к первому входу второго блока вычитания, второй вход Которого соединен с выходом интегратора канала формирования сигнала координаты Z , выход которого соединен с третьим входом решающего блока.
Фиг. г
- I -
%
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электромагнитный измерительный прибор | 1933 |
|
SU40453A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Катыс Г.П | |||
| Оптические информационные системы роботов-манипуляторов | |||
| М.,Машиностроение, 1977 с | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
