Изобретение относится к судостроению, в частности к комбинированным якорным устройствам для постановки подводных объектов на якорь под водой.
Известно комбинированное якорное устройство для постановки подводных объектов на якорь под водой, содержащее якорь с якорной цепью (см. книгу Прасолов С.Н. Амитин М.Б. Устройство подводных лодок. М. Воениздат, 1973, с. 195).
Недостатками данного устройства являются невысокая эффективность и надежность работы.
Причиной указанных недостатков является то, что в устройстве конструктивно не обеспечен контроль за уменьшением остаточной плавучести подводного объекта, вызванной различными воздействиями на него внешней среды.
Технологическим результатом изобретения является повышение надежности стабилизации подводного объекта в подводном положении без хода при постановке его на якорь.
Он достигается тем, что комбинированное якорное устройство для постановки подводных объектов на якорь под водой, содержащее якорь с якорной цепью, снабжено электродинамометром непрерывного измерения усилий в якорной цепи, дистанционно управляемым механизмом подключения его к якорной цепи, индикатором визуальной оценки текущего значения силы сцепления подводного объекта с якорной цепью и анализатором этой силы, электрически связанным с системой автоматической стабилизации подводного объекта без хода.
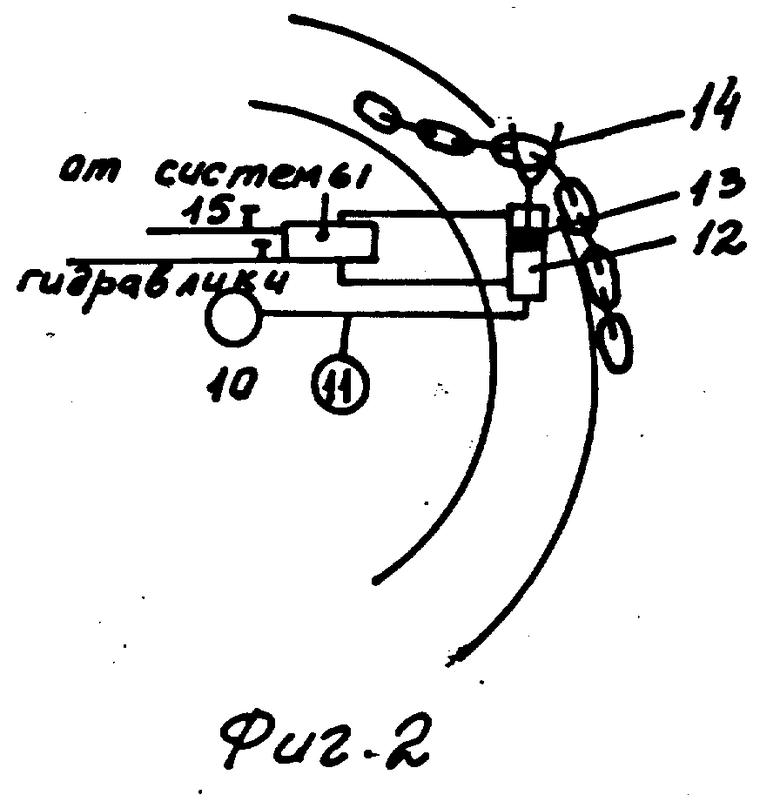
На фиг. 1 изображено комбинированное якорное устройство для постановки подводных объектов на якорь под водой, на фиг. 2 одна из возможных конструкций силоизмерительного элемента с механизмом его сцепления с якорной цепью.
Комбинированное якорное устройство содержит якорь 7, якорную цепь 5, стопор 6 якорной цепи, электродинамометр 8 непрерывного измерения усилий в якорной цепи, дистанционно управляемый механизм 9 подключения электродинамометра 8 к якорной цепи 5, индикатор 11 визуальной оценки текущего значения силы сцепления подводного объекта с якорной цепью, анализатор 10 силы сцепления электродинамометра с якорной цепью и механизмы 4 отдачи и выборки якорной цепи. Анализатор 10 электрически связан с системой автоматической стабилизации подводного объекта без хода, которая включает в себя уравнительную цистерну 1, насос 2 для подачи и откачивания воды из уравнительной цистерны и систему 3 автоматического управления насосом. Конструкция силоизмерительного элемента с механизмом его сцепления с якорной цепью включает в себя гидравлический цилиндр 12 с поршнем 13, механизм захвата 14 якорной цепи и гидравлическую систему 15 подъема-опускания электродинамометра.
Комбинированное якорное устройство (КЯУ) работает следующим образом.
Находясь на определенной глубине и удифферентовавшись с нулевой остаточной плавучестью экипаж подводного объекта (ПО) определяет с помощью эхолота расстояние до дна и назначает глубину ηя постановки на КЯУ. На глубине, меньшей ηя ПО вытравливает якорную цепь (якорь-цепь) длиной ηя и стопорит ее. Дифферентовка ПО при этом нарушена не будет, т.к. якорь 7 и цепь 5 находились все время в воде внутри легкого корпуса. После этого ПО останавливает двигатели и замедляет ход до полной остановки (можно дать и реверс для убыстрения). Когда скорость снизится почти до нуля, должен быть включен механизм сцепления электродинамометра 8 с якорь-цепью 5. В этом случае электродинамометр 8 должен показывать общий вес вытравленной цепи 5 и якоря 7 в воде PΣ При касании якоря 7 грунта PΣ уменьшится на величину веса якоря в воде Pя и веса той части якорь-цепи 5, которая ляжет вместе с якорем 7 на грунт. Чтобы якорь своими лапами вошел в грунт, ПО должен погрузиться на 10-15 м ниже глубины постановки hя и дать реверс. После этого ПО должен откачать воду из уравнительной цистерны и подвсплыть так, чтобы якорь-цепь 5 натянулась, а электродинамометр 8 показывал силу Pp = PΣ - Pя По достижении этого условия ПО должен удифферентоваться так, чтобы наполовину компенсировать вес якоря в воде. Это достигается дополнительной откачкой воды из уравнительной в объеме  м3 где g 9.81 м/с2, ρ ≈1,020 кг/м3 плотность воды, а Pя вес якоря в воде в кН. В таком положении ПО будет находится в устойчивом равновесии на заданной глубине. Это равновесие достигнуто тем, что ПО имеет положительную остаточную плавучесть, уравновешивающую половину веса якоря в воде.
м3 где g 9.81 м/с2, ρ ≈1,020 кг/м3 плотность воды, а Pя вес якоря в воде в кН. В таком положении ПО будет находится в устойчивом равновесии на заданной глубине. Это равновесие достигнуто тем, что ПО имеет положительную остаточную плавучесть, уравновешивающую половину веса якоря в воде.
До тех пор, пока внешние силы по величине не превзойдут границ +0,5 Pя, ПО будет сохранять заданную глубину hя При появлении этих внешних сил на электродинамометр 8 анализатор 10 будет вырабатывать сигнал F(t) и  и подавать в систему автоматической стабилизации без хода, которая будет управлять приемом или откачкой воды из уравнительной цистерны 1.
и подавать в систему автоматической стабилизации без хода, которая будет управлять приемом или откачкой воды из уравнительной цистерны 1.
Если система автоматической стабилизации не будет работать или ПО ее не имеет, то по индикатору 11 визуальной оценки силы сцепления ПО с грунтом оператор может определять величину этой силы, близость ее к границам устойчивости и тенденцию изменения и давать на прием-откачку балласта.
Чтобы насос 2 не работал постоянно может быть указана зона нечувствительности регулятора, например, ε ±0,15 Pя в которой можно допустить изменение внешних сил без их компенсации (до границ устойчивости остается еще ±0,35 Pя).
При силоизмерительном устройстве другого типа возможна другая методика постановки ПО на якорь. Но в любом варианте электродинамометр 8 должен осуществлять постоянный контроль за силой сцепления ПО с грунтом, а анализатор 10 вырабатывать сигнал, пропорциональный возмущающей силе F(t) и ее производной  и подавать сигнал в систему автоматической стабилизации без хода.
и подавать сигнал в систему автоматической стабилизации без хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР ГЛУБИНЫ ПОГРУЖЕНИЯ ПОДВОДНОЙ ЛОДКИ БЕЗ ХОДА | 1999 |
|
RU2154592C1 |
| СТАЦИОНАРНЫЙ ЯКОРЬ ДЛЯ ИЛИСТО-ГЛИНИСТО-ПЕСЧАНЫХ ГРУНТОВ | 1991 |
|
RU2021161C1 |
| ПРИВОД УСТРОЙСТВА ДЛЯ КРЕПЛЕНИЯ И ОТДАЧИ КОРЕННОГО КОНЦА СТЯЖНОГО ЭЛЕМЕНТА | 1991 |
|
RU2006419C1 |
| ПЛАВУЧИЙ ПОДВОДНЫЙ РЕЗЕРВУАР ДЛЯ СБОРА И ХРАНЕНИЯ НЕФТИ И НЕФТЕПРОДУКТОВ | 1991 |
|
RU2021959C1 |
| МОРСКАЯ ГРАВИТАЦИОННАЯ ПЛАТФОРМА | 1990 |
|
RU2016168C1 |
| ТОПЛИВНАЯ СИСТЕМА ПОДВОДНОЙ ЛОДКИ | 1998 |
|
RU2127209C1 |
| АТОМНАЯ ПОДВОДНАЯ ГАЗОПЕРЕКАЧИВАЮЩАЯ СТАНЦИЯ | 1999 |
|
RU2154231C1 |
| ВЫПУСКНОЕ УСТРОЙСТВО | 1995 |
|
RU2120884C1 |
| МОРСКАЯ БУРОВАЯ ПЛАТФОРМА | 1993 |
|
RU2061147C1 |
| КОРАБЕЛЬНАЯ ТОПЛИВНАЯ СИСТЕМА ПОДВОДНОЙ ЛОДКИ | 1997 |
|
RU2123959C1 |
Использование: судостроение. Сущность изобретения: комбинированное якорное устройство для постановки подводных объектов на якорь под водой содержит якорь 7 с якорной цепью 5, электродинамометр 8 непрерывного измерения усилий в якорной цепи 5, дистанционно управляемый механизм 9 подключения электродинамометра 8 к якорной цепи 5, индикатор 11 визуальной оценки текущего значения силы сцепления подводного объекта с якорной цепью 5 и анализатор 10 силы сцепления электродинамометра 8 с якорной цепью 5. Анализатор 10 электрически связан с системой автоматической стабилизации подводного объекта без хода. 2 ил.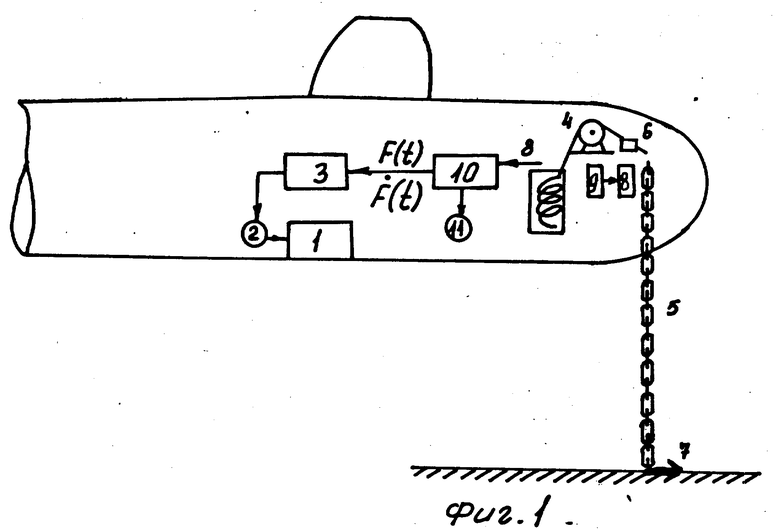
Комбинированное якорное устройство для постановки подводных объектов на якорь под водой, содержащее якорь с якорной цепью, отличающееся тем, что оно снабжено электродинамометром непрерывного измерения усилий в якорной цепи, дистанционно управляемым механизмом подключения его к якорной цепи, индикатором визуальной оценки текущего значения силы сцепления подводного объекта с якорной цепью и анализатором этой силы, электрически связанным с системой автоматической стабилизации подводного объекта без хода.
| Прасолов С.Н., Амитин М.Б | |||
| Устройство подводных лодок | |||
| - М.: Воениздат, 1973, с | |||
| Регулятор давления для автоматических тормозов с сжатым воздухом | 1921 |
|
SU195A1 |
